Capitolo 3
Jitter e Rumore di Fase negli oscillatori ad
anello
Questo lavoro si propone adesso di analizzare le varie problematiche del jitter e del rumore di fase nei tre diversi tipi di oscillatori , ad anello , a rilassamento ed armonici , utilizzando i modelli d’analisi introdotti nel capitolo 2.
I parametri statistici del timing jitter dipendono dalla correlazione fra le diverse sorgenti di rumore coinvolte.
Nel capitolo 2 è stato analizzato il caso di sorgenti rumorose correlate fra loro ma spesso in letteratura vengono considerati i casi in cui le sorgenti sono completamente indipendenti fra loro [10] [11]. In questo caso il jitter introdotto da ciascuno stadio è indipendente da quello introdotto da un altro; questo implica che la varianza del jitter sia data dalla somma delle varianze introdotte da ogni stadio.
Per un oscillatore ad anello caratterizzato da stadi identici , la varianza sarà data da
2
s
mσ dove m è il numero di transizioni durante il periodo ∆T e 2
s
σ è la varianza dell’incertezza introdotta da ciascun stadio durante la transizione. Notando che m è proporzionale a ∆T , la deviazione standard del jitter dopo ∆T secondi è
σ∆T =k ∆T (1)
dove k è una costante di proporzionalità determinata dai parametri del circuito.
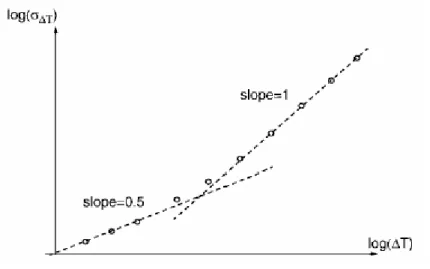
Come noto dal precedente capitolo , sorgenti di rumore come il rumore termico dei dispositivi sono di solito modellate come incorrelate , mentre il rumore di substrato e quello di alimentazione sono trattati come parzialmente o totalmente correlati e la deviazione standard è proporzionale a ∆T:
dove ζ è un’altra costante di proporzionalità .
In pratica , entrambi i tipi di sorgenti, correlate ed incorrelate, coesistono in un circuito , come dimostrato dalla figura 3.1.1 , in cui la deviazione standard del jitter è diagrammata in funzione di ∆T in un grafico bilogaritmico :
Fig. 3.1.1 : RMS jitter in funzione di ∆T
Nella maggior parte delle applicazioni digitali è auspicabile che σ ∆T diminuisca con lo stesso andamento del periodo T . In pratica vorremmo costante il rapporto fra il timing jitter e il periodo del segnale , per questo, in molte applicazioni , è più utile conoscere la misura del phase jitter , definito come
(3) Per il phase jitter dovuto ad una singola sorgente di rumore bianco è dato dalla seguente espressione :
Usando la (3) e la (4) si può calcolare la costante k , data da
(5)
Sappiamo che per calcolare lo spettro di rumore di fase in singola banda (8 – 2.4.2) abbiamo bisogno del valore efficace della ISF.
E’ molto utile riuscire ad approssimare l’andamento di questa funzione ; la fig. 3.1.1 mostra la forma di ISF per un gruppo di oscillatori CMOS ad anello a singola uscita:
Fig.3.1.1 : ISF per oscillatori ad anello [12]
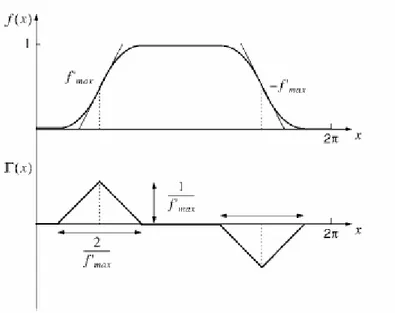
La frequenza di oscillazione viene mantenuta costante mentre varia il numero degli stadi da 3 a 15 . Come si può notare , aumentando il numero degli stadi si riduce il valore di picco della ISF. La ragione sta nel fatto che le transizioni della forma d’onda normalizzata diventano più veloci all’aumentare degli stadi. Basandosi su questa affermazione [12] , si può approssimare la ISF a dei triangoli simmetrici , come mostrato in figura 3.1.2 :
Fig. 3.1.2 : Forma d’onda approssimata e ISF
La ISF raggiunge un valore massimo di 1/f 'max dove f 'max è la massima pendenza della forma d’onda normalizzata f della (1 – 2.4.2 ). Inoltre la pendenza dei lati del triangolo si può assumere ± 1 [12]. Dunque il valore efficace della ISF può essere stimato come :
(6)
Tale relazione può essere approssimata tenendo conto del fatto che lo stadio di ritardo è proporzionale al tempo di risalita (fig. 3.1.3) e vale la seguente relazione:
(7)
Fig.3.1.3 : Relazione fra il tempo di salita e quello di ritardo
Il periodo , inoltre, è 2N volte più lungo di quello del singolo stadio:
max 2 ˆ 2 2 f N t N D ′ = = η π (8) Usando la (6) e la (8) si ottiene: (9)
Tale relazione è valida anche per oscillatori ad anello in configurazione differenziale e dalla sua analisi si vede come Γrms sia principalmente funzione del numero di stadi. Si può quindi accertare con buona approssimazione che la ISF sia indipendente dalla frequenza e dall’ampiezza.
Benché tale funzione decrementi con l’aumentare del numero di stadi nell’oscillatore, non si può concludere che il rumore di fase possa essere ridotto utilizzando un largo numero di stadi , dal momento che aumentano contemporaneamente le sorgenti di rumore per una data dissipazione di potenza e frequenza d’oscillazione.
Per ricavare l’espressione del jitter e del rumore di fase assumiamo come ipotesi che gli oscillatori siano prevalentemente dominati dal rumore bianco [12].
Per un transistore CMOS, la densità spettrale di rumore della corrente di drain è data da:
(10)
dove µ è la mobilità dei portatori , Cox è la capacità gate-ossido per unità di area ,W ed L sono rispettivamente la larghezza e la lunghezza di canale , ∆V è il gate voltage overdrive . L’equazione (10) è valida sia per il regime a canale corto che lungo , fermo restando un appropriato utilizzo della variabile γ ( vale 2/3 per i dispositivi a canale lungo ed è circa tre volte più grande per quelli a canale corto ).
3.1 Oscillatori ad anello single-ended
Facendo riferimento ad un oscillatore ring illustrato nella figura 3.1.4, assumiamo che i transistori PMOS e CMOS abbiano la stessa lunghezza di canale e che VTN=|VTP| . Il massimo rumore di canale totale ( quando sia input che output sono a tensione VDD/2 ) è dato da (11) dove Weff = WN + WP e p n p p n n eff W W W W + + = µ µ µ e ∆V = (VDD/2 ) - VT La dissipazione di potenza totale di un oscillatore ad N stadi è data da:
P=2ηNVDDqmaxf0 (12)
dove η è un parametro che tiene conto della presenza di alcune correnti extra che non contribuiscono alla carica e alla scarica delle capacità.
Assumendo µnWn = µpWp per rendere la forma d’onda simmetrica per il primo ordine , avremo che la f0 sarà data da
(13)
Dove tD è il tempo di ritardo , tr è il tempo di salita e tf è quello di discesa associati alla massima pendenza durante la transizione.
Facendo inoltre l’ipotesi che le sorgenti di rumore termico per i diversi dispositivi siano incorrelate , il rumore di fase totale dovuto ad N sorgenti di rumore è N volte il
valore dato dalla (8 – 2.4.2). Combinando la (8 – 2.4.2) con la (9) , la (10) , la (12) e la (13) si ottiene
(14)
(15)
dove Vchar è la tensione caratteristica del dispositivo ( per un transistor a canale lungo vale ∆V/γ mentre per uno a canale corto vale EcL/ γ , con Ec campo elettrico critico). Analizzando l’equazione (14) si può notare come il rumore di fase sia inversamente dipendente dalla dissipazione di potenza e proporzionale al quadrato della frequenza di oscillazione. E’ inoltre rilevante l’assenza di dipendenza dal numero di stadi N dell’oscillatore ( per una data P e f0 ): evidentemente l’incremento del numero di sorgenti di rumore cancella l’effetto della diminuzione di Γrms all’aumentare di N. Un tale risultato spiega certamente l’incertezza che esiste riguardo all’ottimizzazione del numero N di stadi.
3.2 Oscillatori ad anello differential –ended
Con analoghe considerazioni possiamo ricavare il rumore di fase per la configurazione differenziale. La dissipazione di potenza P è data da
P = N Itail VDD (16)
dove Itail è la bias current per la coppia differenziale .La frequenza di oscillazione può essere approssimata come
(17)
Come è evidente , il rumore dovuto alla Itail non ha effetto in prossimità della f0 ; è invece significativo il suo contributo alle basse frequenze e nell’intorno dei multipli della f0 . Tale rumore può essere notevolmente ridotto cercando di rendere la configurazione più simmetrica possibile .
In questo modo possiamo considerare solo il rumore dei dispositivi e del carico. La corrente di rumore totale è
(18) dove RL è il carico resistivo e Vchar = (VGS – VT) /γ ( per transistor a canale lungo). Analogamente ai single-ended , il rumore di fase e il jitter è dato da
(19)
(20)
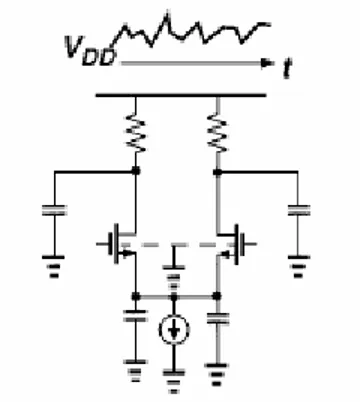
Contrariamente a quanto visto nel primo caso , il rumore di fase degli oscillatori in configurazione differenziale dipende dal numero N di stadi e degrada all’aumentare di questi. Questo risultato può essere interpretato come la conseguenza di una necessaria riduzione della fluttuazione di carica , richiesta per stabilizzare la frequenza di oscillazione (per un fissato livello di potenza ) al crescere di N. Nello stesso tempo, l’aumento di N implica una proporzionale riduzione della Itail , che ridurrà la fluttuazione di un fattore 1/N2 .
Fig. 3.1.4 : Inverter-chain ring oscillator and differential ring oscillator
Ci sono altre sorgenti di rumore ,come la Itail , il rumore di substrato e quello di alimentazione che giocano un importante ruolo nella degradazione del jitter e del rumore di fase. Il rumore a bassa frequenza della Itail affligge il rumore di fase se le caratteristiche simmetriche del circuito differential-ended dell’oscillatore non vengono perfettamente rispettate. In tali casi , la ISF della Itail risulta avere un largo
valore in continua (dc value) che peggiora l’ “upconversion” del rumore a bassa frequenza .
Il rumore di substrato e di alimentazione sono rumori molto complessi da analizzare, e derivano sostanzialmente da due fenomeni.
Il primo riguarda la degradazione della simmetria del circuito dovuto al device mismatches ( errori di raccordo nel circuito).
Il secondo fa riferimento alla capacità totale presente nel source comune della coppia differenziale dei dispositivi .
Il calcolo del jitter dovuto ,per esempio, a perturbazioni sinusoidali della tensione di alimentazione avviene tramite diversi passaggi:
• Interpolazione della forma d’onda di tensione per trovare lo zero-crossing ; • Calcolo del periodo Tn con successiva sottrazione del periodo medio T per
ottenere ∆Tn
• Calcolo del cycle jitter e del cycle-to-cycle jitter [ (6) e (7) del (2.2) ].
Fig. 3.1.5 : Modello del rumore di substrato e di alimentazione
Il rumore di substrato può essere analizzato allo stesso modo .
Risulta evidente ,dopo aver effettuato tali analisi , che la performance dell’oscillatore differenziale è superiore a quello a singola uscita . La configurazione differenziale può essere inoltre ottimizzata modificando vari parametri : 1) misura dei dispositivi ;
Possiamo allora studiare il jitter come funzione di questi tre parametri:
1. Effetti della larghezza di gate del transistor:
In generale , lo studio del jitter in funzione della larghezza di gate (W) mette in luce la presenza di un minimo nell’andamento del jitter per valori abbastanza bassi di W ( nel caso di un oscillatore differenziale simile a quello mostrato in fig.3.1.6 W=80µm ) . Per valori più alti è necessario diminuire la capacità di carico CL per poter mantenere la stessa frequenza di oscillazione [13].
Fig. 3.1.6 : Implementazione di uno stadio dell’oscillatore ad anello
2. Effetti della Dissipazione di Potenza
Il jitter risultante dal rumore dei dispositivi elettronici in genere presenta una dipendenza inversa rispetto alla potenza dissipata dall’oscillatore [10] ; al contrario, l’effetto del rumore di substrato e di alimentazione sul jitter è relativamente indipendente dalla potenza di drain.
3. Effetti del numero di stadi dell’oscillatore
Nelle applicazioni che richiedono che la frequenza di oscillazione sia notevolmente più bassa rispetto alla massima velocità della tecnologia , l’oscillatore deve presentare più di tre stadi: da un confronto fra un oscillatore
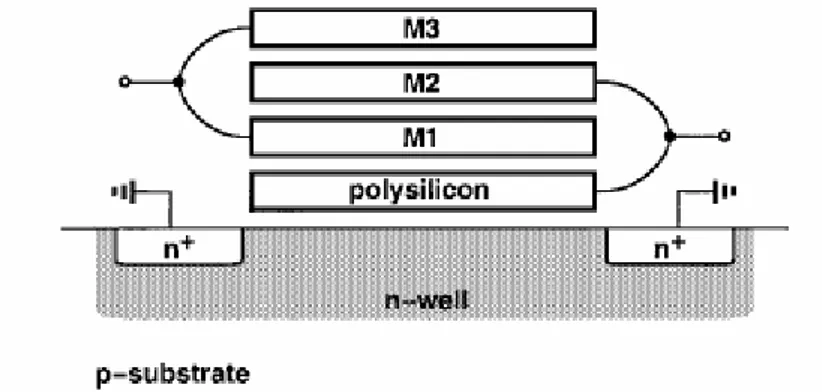
a tre stadi ed uno a sei [13] si nota come il minimo valore del jitter sia presente nella prima configurazione. Questo perché la riduzione della frequenza di oscillazione ad un valore desiderato è dovuta non tanto alla dipendenza dalla tensione delle capacità del transistor, quanto alla media delle capacità fissate di carico CL. Infatti una piccola frazione della capacità totale di carico CL è soggetta a variazioni dovute ai rumori di substrato e di alimentazione. L’aggiunta di una capacità fissa per ogni stadio comporta il problema dell’accoppiamento fra il rumore di substrato e l’armatura inferiore del condensatore. Per minimizzare questo effetto conviene isolare il condensatore dal substrato ,come illustrato in fig. 3.1.7 : uno strato di n-well diffusa sotto la capacità in modo da bloccare il rumore prodotto nel substrato.
Fig. 3.1.7 : Scudo utilizzato per bloccare il rumore di substrato sotto il condensatore
Il rumore di substrato e di alimentazione sono non bianchi e spesso presentano dei picchi a varie frequenze nella loro densità spettrale E’ molto importante anche il fatto che tali rumori, considerati in nodi diversi dell’oscillatore, presentano una forte correlazione . Per capirne l’importanza possiamo considerare il caso in cui si abbiamo uguali sorgenti su tutti i nodi del circuito , in modo da osservare che solo il rumore in prossimità delle frequenze multiple della fondamentale ( Nωo) interessa la fase.
3.3 IMPLICAZIONI DI PROGETTO
La configurazione migliore in termini di jitter e rumore di fase è dunque quella differenziale , dal momento che presenta una più bassa sensitività ai rumori di alimentazione e substrato e la sua caratteristica di simmetria di circuito contribuisce ad eliminare i problemi dovuti al rumore termico e all’accoppiamento di substrato . Si cerca , inoltre , di utilizzare carichi lineari per ridurre il rumore 1/f [13] .
La domanda più frequente per la progettazione degli oscillatori ad anello riguarda il numero ottimo degli stadi da utilizzare. In generale , tale scelta si basa su severi compromessi riguardanti gli effetti del rumore 1/f , la frequenza massima di oscillazione desiderata, l’influenza delle sorgenti di disturbi esterni ( supply and substrate noise) . Queste considerazioni rivelano che il minimo numero di stadi per una migliore performance è tre.