Capitolo 6
Test e Risultati
In questo capitolo si illustreranno i risultati ottenuti per mezzo dell’utilizzo dell’algoritmo presentato nei paragrafi precedenti.
6.1 – Hardware utilizzato
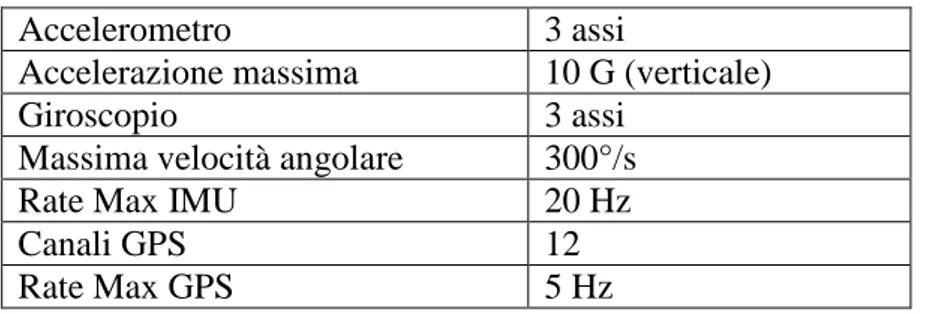
Il dispositivo hardware utilizzato è l’ AP04 della UAV Navigation di cui si darà una breve descrizione .
Accelerometro 3 assi
Accelerazione massima 10 G (verticale) Giroscopio 3 assi
Massima velocità angolare 300°/s Rate Max IMU 20 Hz Canali GPS 12 Rate Max GPS 5 Hz
6.2 – Prove effettuate: GPS sempre attivo
Per i test è stato utilizzato il seguente scenario: veicolo fermo per 100 secondi, dopo di che si percorre
passante per i seguenti punti:
1) punto LAT: 41°40'30''N = 41,675° = 0,7273rad LON: 12°50'46''E = 12,8462° = 0,2242 rad 2) punto LAT: 41°40'28''N = 41,6745° = 0,7273rad
LON: 12°50'11''E =
3) punto LAT: 41°39'55''N = 41,6654° = 0,7271rad LON: 12°50'13''E = 12,837° = 0,224 rad 4) punto LAT: 41°39'55''N = 41,6655° = 0,7271rad
LON: 12°50'53''E = 12,8483° = 0,2242 rad Nella figura seguente si riporta
Figura 2:Traiettoria vera
Nella figura seguente vien GPS.
Prove effettuate: GPS sempre attivo
Per i test è stato utilizzato il seguente scenario: veicolo fermo per 100 secondi, dopo di che si percorre un tragitto di forma rettangolare in senso antiorario passante per i seguenti punti:
punto LAT: 41°40'30''N = 41,675° = 0,7273rad LON: 12°50'46''E = 12,8462° = 0,2242 rad punto LAT: 41°40'28''N = 41,6745° = 0,7273rad
LON: 12°50'11''E = 12,8366° = 0,224 rad punto LAT: 41°39'55''N = 41,6654° = 0,7271rad
LON: 12°50'13''E = 12,837° = 0,224 rad punto LAT: 41°39'55''N = 41,6655° = 0,7271rad
LON: 12°50'53''E = 12,8483° = 0,2242 rad
ente si riporta la traiettoria vera seguita dal veicolo.
Nella figura seguente viene riportata la traiettoria ottenuta dalla lettura dei dati dal Per i test è stato utilizzato il seguente scenario: veicolo fermo per 100 secondi, un tragitto di forma rettangolare in senso antiorario
la traiettoria vera seguita dal veicolo.
Figura 3: Dati GPS
Nella figura seguente riportiamo invece la traiettoria stimata dall’algoritmo.
Figura 4: traiettoria stimata dall'algor
Nella figura seguente viene riportata
di quella vera e dei dati GPS per poter mettere in evidenza l’azione di integrazione effettuata dall’algoritmo.
riportiamo invece la traiettoria stimata dall’algoritmo.
: traiettoria stimata dall'algoritmo
figura seguente viene riportata la sovrapposizione della traiettoria stimata, di quella vera e dei dati GPS per poter mettere in evidenza l’azione di integrazione
mo.
riportiamo invece la traiettoria stimata dall’algoritmo.
la sovrapposizione della traiettoria stimata, di quella vera e dei dati GPS per poter mettere in evidenza l’azione di integrazione
6.3 – Prove effettuate: GPS out per 5 secondi
Proponiamo adesso un test leggermente differente rispetto a quello visto nel paragrafo precedente. Siccome l’integrazione GPS/INS è utilizzata
miglioramento della stima della posizione,
del GPS, si è deciso di ignorare il GPS per 5 secondi e, quindi, valutare le prestazioni dell’algoritmo.
un tratto rettilineo, per poter testare l’a dall’algoritmo di integrazione.
ottenuti dal GPS e il grafico delle traiettorie sovrapposte.
Figura 6: Dati GPS ( in alto a sinistra i 5 secondi di disattivazione del GPS)
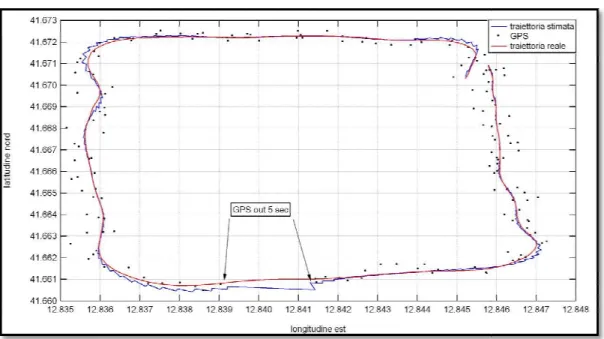
Figura 7: Traiettorie sovrapposte : vera ( in rosso), s
Prove effettuate: GPS out per 5 secondi
Proponiamo adesso un test leggermente differente rispetto a quello visto nel paragrafo precedente. Siccome l’integrazione GPS/INS è utilizzata, oltre che per il miglioramento della stima della posizione, anche per ovviare a possibili black out del GPS, si è deciso di ignorare il GPS per 5 secondi e, quindi, valutare le prestazioni dell’algoritmo. Il GPS è stato disattivato quando il veicolo pe
, per poter testare l’affidabilità della stima prodotta dall’algoritmo di integrazione. Nelle figure seguenti riportiamo il grafico dei punti ottenuti dal GPS e il grafico delle traiettorie sovrapposte.
: Dati GPS ( in alto a sinistra i 5 secondi di disattivazione del GPS)
: Traiettorie sovrapposte : vera ( in rosso), stimata ( in blu) e dati GPS ( in nero)
Proponiamo adesso un test leggermente differente rispetto a quello visto nel , oltre che per il anche per ovviare a possibili black out del GPS, si è deciso di ignorare il GPS per 5 secondi e, quindi, valutare le o il veicolo percorre ffidabilità della stima prodotta Nelle figure seguenti riportiamo il grafico dei punti
Dalla figura 6 si evince che in caso di assenza del segnale GPS l’algoritmo seppur con maggiore errore riesce a mantenere la traiettoria.
6.4 – Prestazioni dell’algoritmo
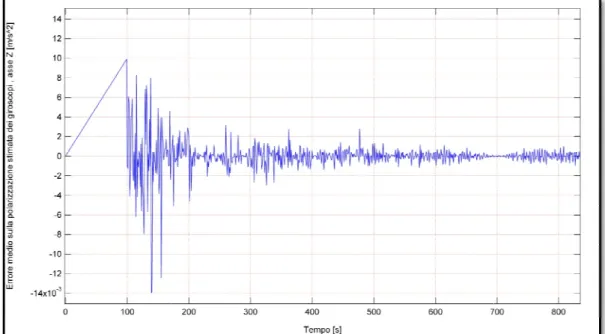
Nelle figure seguenti viene riportato l’andamento dell’errore medio della polarizzazione stimata degli accelerometri e dei giroscopi.
che per i primi 100 secondi ( quando il veicolo è fermo), la polarizzazione stimata dei sensori evolve come se non vi fo
inizia a muoversi l’algoritmo inizia a lavorare sulle po
portare l’errore a convergere verso zero dopo un determinato numero di secondi. Le prime tre figure riguardano i tre assi degli accelerometri e le seconde tre quelli dei giroscopi.
Figura 8: Errore medio sulla polarizzazione stimata
Dalla figura 6 si evince che in caso di assenza del segnale GPS l’algoritmo seppur con maggiore errore riesce a mantenere la traiettoria.
Prestazioni dell’algoritmo
Nelle figure seguenti viene riportato l’andamento dell’errore medio della polarizzazione stimata degli accelerometri e dei giroscopi. Dai grafici si evince che per i primi 100 secondi ( quando il veicolo è fermo), la polarizzazione stimata dei sensori evolve come se non vi fosse nessuna correzione. Quando il veicolo l’algoritmo inizia a lavorare sulle polarizzazioni di modo da a convergere verso zero dopo un determinato numero di secondi. Le prime tre figure riguardano i tre assi degli accelerometri e le seconde tre quelli
olarizzazione stimata degli accelerometri, asse X
Dalla figura 6 si evince che in caso di assenza del segnale GPS l’algoritmo seppur
Nelle figure seguenti viene riportato l’andamento dell’errore medio della Dai grafici si evince che per i primi 100 secondi ( quando il veicolo è fermo), la polarizzazione stimata sse nessuna correzione. Quando il veicolo larizzazioni di modo da a convergere verso zero dopo un determinato numero di secondi. Le prime tre figure riguardano i tre assi degli accelerometri e le seconde tre quelli
Figura 9:Errore medio sulla polarizzazione stimata
Figura 10:Errore medio sulla polarizzazione stimata
olarizzazione stimata degli accelerometri,asse Y
Figura 11: Errore medio sulla polarizzazione stimata
Figura 12: Errore medio sulla polarizzazione stimata
olarizzazione stimata dei giroscopi, asse X
Figura 13: Errore medio sulla polarizzazione stimata
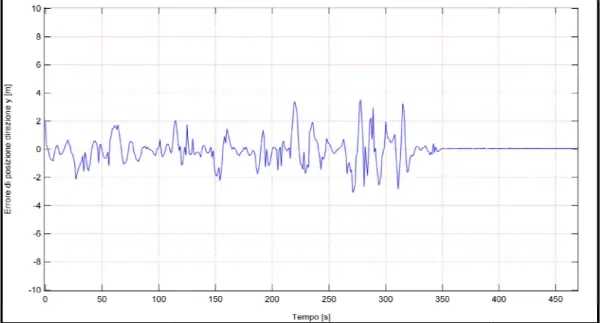
Qui di seguito vengono riportati i grafici degli errori di posizione lungo i tre assi x,y,z del sistema di riferimento ECEF ( sistema
e sistema di riferimento per l’integrazione GPS/INS).
Figura 14: Errore medio di posizione nella direzione x ECEF
olarizzazione stimata dei giroscopi, asse Z
Qui di seguito vengono riportati i grafici degli errori di posizione lungo i tre assi x,y,z del sistema di riferimento ECEF ( sistema usato principalmente in questa tesi e sistema di riferimento per l’integrazione GPS/INS).
: Errore medio di posizione nella direzione x ECEF
Qui di seguito vengono riportati i grafici degli errori di posizione lungo i tre assi usato principalmente in questa tesi
Figura 15: Errore medio di posizione nella direzi
Figura 16: Errore medio di posizione nella direzione z ECEF
Infine si riporta una tabella riassuntiva delle prestazioni del ricevitore GPS stand alone e del sistema GPS aided INS.
GPS GPS/INS
Tabella 1: Errore massimo e radice dell'errore quadratico medio per il ricevitore GPS stand alone e per il ricevitore GPS aided INS.
: Errore medio di posizione nella direzione y ECEF
: Errore medio di posizione nella direzione z ECEF
Infine si riporta una tabella riassuntiva delle prestazioni del ricevitore GPS stand alone e del sistema GPS aided INS.
Errore Massimo [m] RMSE [m] 35.7090 13.7989 17.2451 2.0948
: Errore massimo e radice dell'errore quadratico medio per il ricevitore GPS stand alone e per il
Infine si riporta una tabella riassuntiva delle prestazioni del ricevitore GPS stand
RMSE [m] 13.7989
2.0948
6.5 – Conclusioni e Prospettive future
L’algoritmo proposto per l’integrazione tra GPS e INS è sensibile alle condizioni iniziali e al modo in cui si inizializzano le matrici in gioco, poiché il filtro di Kalman esteso linearizza le equazioni di navigazione attorno all’uscita del sistema di navigazione inerziale. Quando l’inizializzazione è fatta in modo corretto l’algoritmo funziona bene e chiaramente supera in prestazioni il ricevitore GPS stand alone. Con un rapporto di 20 volte tra la frequenza di campionamento del sistema INS e GPS, l’integrazione riduce l’errore di posizionamento di un fattore 6 rispetto al ricevitore GPS stand alone. I test effettuati hanno mostrato inoltre che la velocità di convergenza degli errori di assetto e della polarizzazione dei sensori stimati dipendo non solo dai parametri del filtro, ma anche dalla traiettoria seguita. Per l’errori di assetto e polarizzazione dei giroscopi, per esempio, è necessario che la piattaforma IMU effettui una rotazione ( cioè la traiettoria dovrebbe iniziare con una o più curve) se si vuole una convergenza più rapida. Sebbene in questa tesi alcuni risultati siano stati ottenuti per mezzo di simulazioni, tali risultati fanno pensare ad un possibile applicazione in ambienti reali. La posizione stimata dall’algoritmo risulta fortemente dipendente dai dati GPS, quindi per avere una stima ottima le matrici di covarianza R e Q devono essere inizializzate in modo da rendere il sistema fortemente dipendente dal GPS. Questo inoltre ci fa capire che per poter migliorare ulteriormente le prestazioni sarebbe necessario l’utilizzo di un ricevitore GPS il più performante possibile. Per quanto riguarda i sensori, le prestazioni dipendono fortemente dalla loro calibrazione. Quindi in un eventuale sviluppo futuro di questa tesi si rende necessario un intervento in tal senso. Qui di seguito verranno riportati sinteticamente i lavori che si ritengono necessari, per un eventuale proseguimento di questo lavoro di tesi, affinché la stima diventi più affidabile:
• Sviluppo di un metodo per la calibrazione iniziale dei sensori per la correzione del fattore di scala,del bias,del disallineamento , et cetera.
• Studio di un metodo per la stima del ritardo tra il tempo delle misure attuali ed il tempo di output della posizione stimata dal ricevitore GPS.
• Sviluppo di un metodo più affidabile per la correzione online del disallineamento della piattaforma inerziale.