CAPITOLO 1
Superfici ad alta impedenza progettate
mediante algoritmi genetici
In questo capitolo si presenta una metodologia basata sugli algoritmi genetici [Rif.1] usata per la sintesi di superfici ad alta impedenza. Queste superfici sono particolarmente interessanti in quanto presentano il vantaggio di comportarsi come un conduttore magnetico perfetto (Perfect Magnetic Conductor – PMC) in un certo range di frequenze. Per arrivare a questo risultato e’ stata utilizzata una struttura dielettrica multistrato insieme a uno schermo FSS ed un piano di massa perfettamente conduttore. Gli algoritmi genetici, GA, usando un solver elettromagnetico basato sul metodo dei momenti (MOM), valutano le proprietà di trasmissione e riflessione della struttura e determinano la forma e la dimensione dello schermo FSS, la permettività e lo spessore di ogni strato dielettrico.
Nei successivi paragrafi sarà quindi riportata una descrizione degli algoritmi genetici e successivamente le superfici ad alta impedenza studiate in questa tesi.
1.1 – Algoritmi evoluzionari
Le moderne tecniche elettromagnetiche applicate a problemi di irradiazione o di scattering richiedono spesso l’impiego di metodi di ottimizzazione. Generalmente problemi di questo tipo coinvolgono un elevato numero di parametri e l’ottimizzazione avrà quindi come obiettivo la determinazione di una soluzione che rappresenti un minimo (o un massimo) globale di una funzione di più variabili che modellizza un sistema complesso.
Gli Algoritmi Genetici sono metodi di ricerca stocastica globale, ispirati alle teorie evoluzionistiche. Essi operano su un insieme di soluzioni potenziali opportunamente codificate, applicando il principio di sopravvivenza degli individui più forti (vale a dire le
soluzioni migliori), che sono anche quelli che hanno maggiori probabilità di riprodursi e di tramandare quindi il proprio patrimonio genetico alle generazioni successive, migliorando le caratteristiche della popolazione nella sua globalità che, tornando allo spazio delle soluzioni, si avvicina ad ogni stadio evolutivo alla migliore delle soluzioni possibili.
La principale differenza tra un’ottimizzazione operata con gli Algoritmi Genetici ed una basata su tecniche tradizionali, come il metodo del gradiente coniugato o i metodi quasi-newtoniani, è che queste ultime sono classificate come tecniche locali, nel senso che producono risultati fortemente dipendenti dalle condizioni iniziali; le tecniche locali risultano inoltre strettamente legate al dominio delle soluzioni possibili. Ciò costituisce un vantaggio in termini di velocità di convergenza verso un massimo (o un minimo) locale, ma pone anche delle limitazioni molto forti sul dominio delle soluzioni, come la differenziabilità e/o la continuità, condizioni che spesso non possono essere soddisfatte in applicazioni reali. Le tecniche globali sono invece largamente indipendenti dal dominio delle soluzioni e pongono poche condizioni sullo stesso. Questa caratteristica conferisce loro maggiore robustezza qualora vengano impiegate in problemi caratterizzati da spazi delle soluzioni dall’andamento notevolmente irregolare. In particolare, esse si adattano molto meglio a domini aventi discontinuità, condizioni sui parametri o ad elevato numero di dimensioni, con numerosi massimi locali potenziali.
Gli aspetti sfavorevoli riguardano in genere la velocità di convergenza degli algoritmi, anche se nei processi di ottimizzazione l’obiettivo primario non è tanto trovare una soluzione nel minor tempo possibile, quanto trovarne una vicina alla migliore in assoluto.
di ottimizzazione viene scelto un insieme di soluzioni, o individui, che è fatto evolvere verso una soluzione ottimale, sotto l’azione di pressione selettiva operata da una funzione oggetto (“fitness”), il cui scopo è quello di quantificare il grado di bontà della singola soluzione.
Così come in natura ogni caratteristica di un individuo (fenotipo) appartenente ad un genere vivente (genotipo) è determinata univocamente da una particolare sequenza di geni, allo stesso modo ogni caratteristica di una possibile soluzione viene codificata in una stringa di bit e mappata quindi nel dominio di decisione della variabile. L’insieme di tutti i geni caratterizzerà un cromosoma, che codifica una soluzione; i cromosomi, a loro volta riuniti in una popolazione, mapperanno il dominio delle soluzioni possibili. Nel corso del processo evolutivo, individui con fenotipo tale da consentire il superamento della selezione naturale, scambiano parte del loro patrimonio genetico (“cross-over”). Gli individui della generazione successiva conserveranno quindi le caratteristiche dei genitori, e, potenzialmente, saranno migliori di loro. Le informazioni genetiche relative agli individui scartati verranno perse irreversibilmente. Il cross-over non è l’unico strumento evoluzionistico: talvolta in natura a causa di eventi casuali si manifestano alterazioni del patrimonio genetico di alcuni individui. Si parla in questo caso di mutazione; nell’implementazione di un Algoritmo Genetico essa costituisce un operatore di particolare importanza per la ricerca del massimo assoluto di una funzione, poiché consente di allargare il dominio di investigazione, evitando la convergenza dell’algoritmo verso un massimo locale. La realizzazione di un Algoritmo Genetico Standard
1. Codifica dei parametri delle soluzioni sotto forma di geni.
2. Creazione della popolazione iniziale.
3. Valutazione dei valori di fitness relativi ai singoli cromosomi.
4. Selezione di alcuni individui appartenenti alla popolazione.
5. Incrocio degli individui selezionati e mutazione, per produrre la generazione successiva.
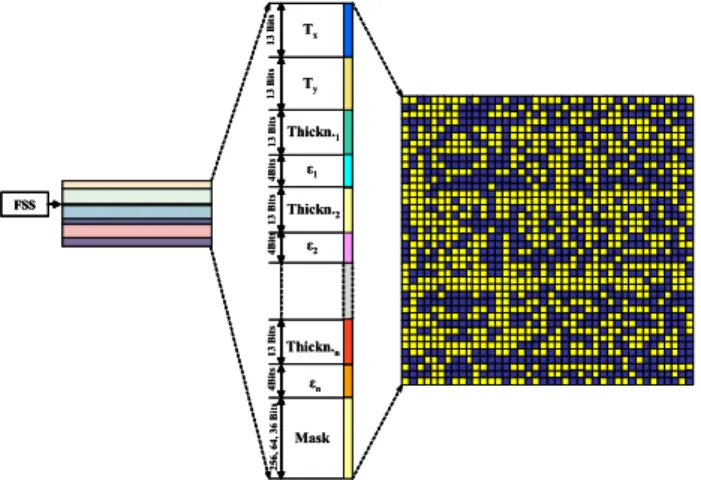
L’operazione presente al punto 1 consiste nella scelta dei parametri costruttivi necessari a caratterizzare il comportamento della struttura da ottimizzare, ed incide considerevolmente sull’efficacia complessiva dell’algoritmo. Il numero di questi parametri definisce la dimensione dello spazio delle variabili, nel quale è possibile rappresentare senza errore ogni struttura in forma vettoriale; ogni vettore (cioè ogni cromosoma) è suddiviso in campi (geni), che corrispondono in maniera biunivoca ai parametri della struttura. Le codifiche presenti in letteratura sono molteplici, ma la più diffusa è senz’altro quella binaria. La creazione di una popolazione iniziale a cui si riferimento al punto 2 consiste quindi nel formare una matrice di simboli binari mediante un generatore di numeri casuali; le colonne della matrice sono i cromosomi, vale a dire le singole soluzioni codificate. In figura 1 è riportata la struttura di ogni cromosoma, suddivisa nei suoi campi informativi.
Tx Ty Thickn.1 Thickn.2 Thickn.n ε1 ε2 εn Mask 13 Bi ts 13 Bi ts 13 Bi ts 4B its 13 B its 4B its 13 Bi ts 4B it s 25 6, 6 4, 3 6 B it s FSS Tx Ty Thickn.1 Thickn.2 Thickn.n ε1 ε2 εn Mask 13 Bi ts 13 Bi ts 13 Bi ts 4B its 13 B its 4B its 13 Bi ts 4B it s 25 6, 6 4, 3 6 B it s FSS FSS
Figura 1.1 : Una struttura dielettrica multistrato contenente una superficie selettiva in frequenza è rappresentata da un cromosoma (posto al centro della figura), di cui sono visibili i singoli campi informativi. I cromosomi, codificati in formato binario, costituiscono le colonne della matrice presente sulla destra, che rappresenta a sua volta una popolazione, ovvero un sottoinsieme dello spazio delle soluzioni possibili.
Si analizzano ora più in dettaglio i passi principali dell’applicazione dell’algoritmo genetico.
1.1.1 – Selezione
Una volta creata la popolazione iniziale, il passo successivo sarà selezionare gli individui per costruire la generazione successiva.
E’ possibile scegliere tra due strategie di selezione. In entrambi i casi la probabilità di selezione di un cromosoma viene determinata dal suo valore di fitness normalizzato rispetto al livello medio di fitness della popolazione (selezione di tipo proporzionale). Con la prima strategia si avrà la sostituzione diretta dei cromosomi peggiori in termini di fitness. Avendo eliminato dei cromosomi, ed avendo stabilito il criterio di mantenere costante il numero di cromosomi, è
necessario rimpiazzarli. Un metodo per fare ciò consiste nell’introdurre a loro posto il cromosoma con migliore fitness.
Algoritmi Genetici che operano una simile sovrapposizione tra una generazione e quella successiva vengono talvolta indicati con il termine “steady state”. Questa tecnica manifesta maggiore velocità di convergenza, anche se ciò può comportare una limitazione per le dimensioni dello spazio di ricerca.
Il criterio alternativo invece suddivide lo stadio selettivo in due passi: si applica dapprima l’operatore selezione a tutta la mappa, calcolando la probabilità di selezione di ogni cromosoma con la tecnica esposta precedentemente. Al secondo step si applica l’operatore selezione ad alcuni cromosomi scelti casualmente. L’effetto auspicato è quello che non vada perduto il patrimonio genetico di soluzioni complessivamente non valide che potrebbero però possedere alcuni parametri ottimizzati, potenzialmente trasferibili agli individui migliori con il meccanismo del cross-over.
1.1.2 – Cross-over
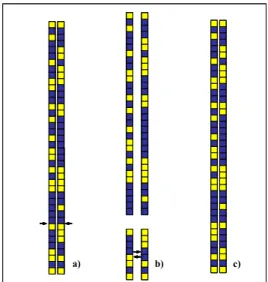
Il cross-over può essere implementato sia in modalità “single point” che “multi-point”: in entrambi i casi vengono scelte casualmente coppie di cromosomi. Si decide quindi con probabilità “pcross” se eseguire o meno il cross-over; in letteratura si consigliano valori di probabilità di intervento del cross-over dell’ordine del 60÷90 % nell’ottimizzazione di problemi elettromagnetici, e in questo caso si è scelta una probabilità pari all’80%. In caso affermativo, il cross-over
“single point”, mostrato in Figura 2, è implementato scegliendo
casualmente un punto di scissione e scambiando tra loro i segmenti dei due cromosomi che si vengono a creare.
a) b) c)
a) b) c)
Figura 1.2 : Cross-over single point: due cromosomi, scelti casualmente tra quelli selezionati, hanno una probabilità pari all’80% di essere incrociati. Se ciò accade, è dapprima scelto un punto di scissione (a) e sono poi scambiate le parti dei cromosomi poste al di sotto di esso (b). Infine i due cromosomi “figli” sono inseriti al posto di quelli originari (c).
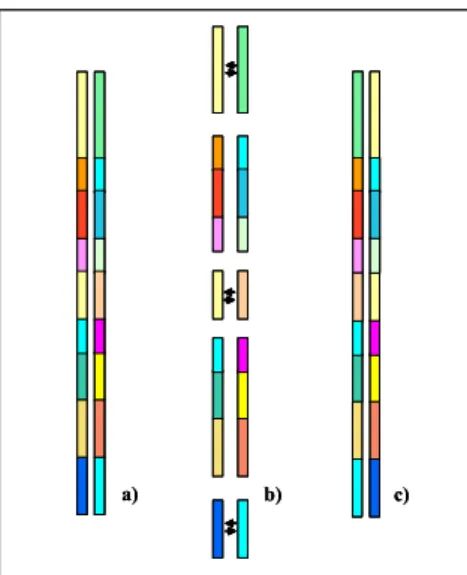
Nella modalità “multi-point” si sceglie invece in modo casuale quanti e quali geni saranno scambiati tra i due cromosomi. La differenza tra le due tecniche è essenzialmente dovuta al fatto che nel primo caso il cromosoma nel suo insieme è interpretato come l’entità contenente l’informazione genetica, mentre nel secondo caso il processo di ottimizzazione risulta maggiormente legato ai singoli campi informativi, e si evita di alterare parametri già ottimizzati durante il
cross-over, poiché i campi informativi non vengono spezzati. In figura
a) b) c) a)
a) b)b) c)c)
Figura 1.3 : Cross-over multi point: in questo caso se i due cromosomi vengono prescelti per l’incrocio (a), sono determinati stocasticamente il numero di geni da scambiare (tre nel caso in figura) e la loro posizione nei cromosomi (b). Al termine di questo processo i due nuovi cromosomi sono reinseriti nella mappa cromosomica (c).
1.1.3 - Mutazione
La mutazione è un altro operatore evolutivo comunemente implementato negli algoritmi genetici, e consiste nella variazione casuale di una parte dell’informazione genetica. Nel caso di algoritmi con codifica binaria si realizza applicando ad ogni bit l’operatore logico NOT.
La mutazione viene in genere indicata come un operatore secondario rispetto alla selezione ed al cross-over, e in letteratura si consiglia di limitarne la probabilità di occorrenza, adottando valori tipici pari all’1-10 %, notevolmente inferiori a quelli relativi al cross-over che è invece indicato come il principale strumento evolutivo. Una probabilità troppo grande può comportare la mancata convergenza dell’algoritmo, ma la notevole capacità di determinare soluzioni di problemi complessi prossime a quella ottima propria degli Algoritmi
Genetici è in gran parte dovuta ad essa. Quando infatti il dominio delle soluzioni possibili è molto vasto, l’apporto della mutazione può risultare molto produttivo, evitando la convergenza verso un minimo locale. Un’ implementazione della mutazione alternativa rispetto a quella classica, consiste nel variare dinamicamente la probabilità di mutazione. L’intervento della mutazione è utile quando l’evoluzione tende a fermarsi, ossia quando il valore di fitness tende a rimanere costante al crescere del numero delle generazioni; al contrario, la mutazione deve occorrere raramente durante il corso dell’evoluzione. Infine, è opportuno notare che l’algoritmo genetico determinerà una soluzione sub-ottima , ed è compito del progettista decidere quando arrestare l’evoluzione della popolazione selezionata.
Durante il processo evolutivo, a causa dell’applicazione degli operatori, può accadere che la mappa cromosomica peggiori.
Il peggioramento non è necessariamente un avvenimento negativo, perché, come già detto a proposito dell’operatore cross-over , in una ottimizzazione multi-oggetto, soluzioni globalmente non valide possono apportare con il loro patrimonio genetico miglioramenti alla popolazione, celando al loro interno valori ottimi di singoli parametri. Al termine di ogni generazione viene quindi confrontato il miglior cromosoma con quello relativo alla generazione precedente e se si riscontra un miglioramento, quest’ultimo andrà a sostituire il peggiore della generazione corrente.
1.2 – Cenni sul solver elettromagnetico
[Rif.2], allo scopo di valutare le prestazioni delle strutture contenenti Superfici Selettive in Frequenza.
Il MOM è un metodo numerico basato sull’equazione integrale che risolve un problema di tipo elettromagnetico attraverso la determinazione delle correnti indotte. Una volta note le correnti e’ poi possibile risalire ai campi tramite delle relazioni integrali. Le correnti indotte possono essere vere o fittizie che sorgono dall’ applicazione del teorema di equivalenza.
Le equazioni che legano le correnti al termine noto hanno la forma:
F
( )
g =h,dove F è un operatore lineare noto, h è una funzione nota (eccitazione) e g è l’incognita. Il problema è quindi quello di determinare g; per ottenere una soluzione numerica si sviluppa g su una base di funzioni gn attraverso dei pesi an. Le funzioni base
saranno note e scelte oculatamente nel dominio o in sottodomini della funzione g, per cui il problema si riconduce alla ricerca dei pesi. Successivamente si utilizza l’operazione di testing applicando un prodotto interno tra tutti i membri dell’equazione e una ulteriore base di funzioni wn ortonormale la cui scelta identifica diverse procedure:
tra le più usate c’è quella di Galerkin se wn=gn o il metodo del point-matching se wn=δ(x-xn), ovvero delle delta di dirac centrate in punti
discreti xn. La scelta deve essere fatta in modo da semplificare il più
possibile la ricerca della soluzione e permettere la ricostruzione della funzione incognita, che in generale può avere un andamento qualsiasi lungo x.
Qualsiasi sia la scelta, il problema di partenza si esprime in forma matriciale:
[ ] [ ] [ ]
Fmn ⋅ an = hm .Nel caso in cui la corrente incognita sia definita su una superfice 3D si procede a una discretizzazione di questa superficie ad elementi triangolari o poligonali di dimensioni molto minori della lunghezza d’onda e si utilizzano quindi opportune funzioni base, roof-top definite su tali sottodomini.
1.3 – Caratterizzazione delle superfici ad alta
impedenza
Dopo aver studiato come nasce e viene ottimizzata una superficie ad alta impedenza, in questo paragrafo, si presentano le due superfici prese in esame. Entrambe hanno la caratteristica di comportarsi come un conduttore magnetico perfetto in un determinato range di frequenze: dal teorema delle immagini è noto che un dipolo posto parallelamente a un PMC ha delle caratteristiche radiative uguali a quelle che si ottengono sostituendo al PMC una superficie geometrica fittizia e ponendo un dipolo, detto dipolo immagine, speculare a quello reale rispetto a tale superficie e in fase con il dipolo reale. Dall’applicazione di tale teorema ne consegue che, nel range di interesse, è possibile migliorare le performance del dipolo rispetto alla configurazione isolata.
Una superficie che aspiri a comportarsi da PMC deve soddisfare la condizione di annullamento delle componenti tangenziali del campo magnetico per ogni polarizzazione dell’onda incidente (nel
elettrico perfetto, PEC, si annullano le componenti tangenziali del campo elettrico). Nel caso di PEC la condizione si traduce nell’ottenere un coefficiente di riflessione per il campo elettrico di modulo unitario e segno negativo: E=-1.
Questo valore implica riflessione totale della potenza incidente con uno sfasamento di 180° gradi del campo riflesso rispetto a quello incidente. Il problema duale comporterà quindi la ricerca di un coefficiente di riflessione per il campo magnetico pari a H=-1.
Ma poiché vale E=-H, la condizione da imporre per la determinazione
della struttura ad alta impedenza superficiale risulta E=1. Ciò
implica riflessione totale della potenza incidente con uno sfasamento nullo tra campo riflesso e incidente.
Di conseguenza, per trovare il range di frequenze desiderato, si è fatta incidere normalmente un’onda sulla struttura e, dal grafico del coefficiente di riflessione al variare della frequenza, si è scelto il range attorno al punto di annullamento della fase.
1.3.1 – Superficie ad alta impedenza con dielettrici
multistrato
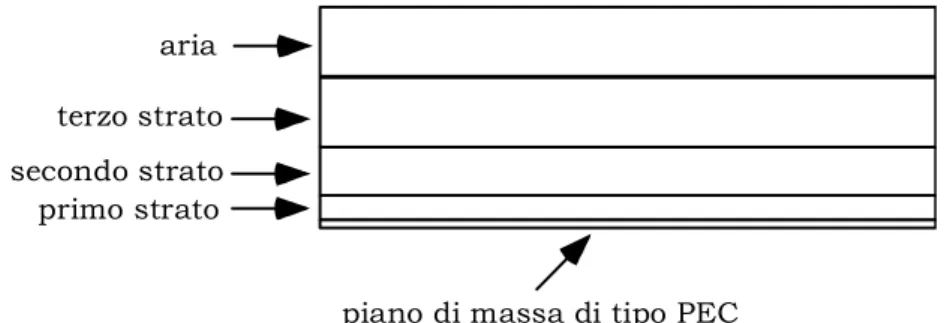
La prima struttura che viene presentata è caratterizzata da:
-un piano di massa di tipo conduttore elettrico perfetto(PEC). -un primo strato caratterizzato da una costante dielettrica ε1=25 e di spessore t1=0.108 cm.
-un secondo strato caratterizzato da una costante dielettrica ε2=10.2 e di spessore t2=0.415 cm.
ε3=15 e di spessore t3=0.591 cm.
Tra il dipolo e questa struttura sara’ lasciato uno spessore d’aria il cui
valore sara’ fissato in seguito.
La struttura e’ mostrata in Figura 1.4.
primo strato terzo strato aria
piano di massa di tipo PEC secondo strato
Figura 1.4 : Superficie ad alta impedenza con dielettrici multistrato
Lo spessore dello strato d’aria non viene dimensionato con gli Algoritmi Genetici: questo infatti si lega all’ impedenza d’ ingresso del dipolo. Per il suo dimensionamento si sono sfruttati i risultati ottenuti da un programma che valuta l’ impedenza d’ingresso di un dipolo al variare dello spessore dello strato d’aria tra il dipolo e un piano di massa di tipo PMC ideale.
All’ impedenza d’ingresso del dipolo e allo spessore dello strato d’aria si lega anche il dimensionamento della linea di trasmissione a microstriscia accoppiata che alimenta il dipolo (argomento affrontato nel capitolo3): sarà necessario infatti che l’impedenza della linea di trasmissione sia uguale all’impedenza d’ingresso del dipolo cosi da avere un buon adattamento. Come riferimento si e’ scelto un ROS
(Rapporto d’Onda Stazionaria) con un andamento al di sotto di 1.5 nella banda di interesse.
Lo spessore dello strato d’aria che si è scelto è di 5 mm a cui corrisponde un’ impedenza d’ingresso di R=170 Ω.
La scelta è caduta su questa coppia di valori dopo aver svolto varie simulazioni con altre coppie di valori. I risultati ottenuti sono stati quelli migliori in termini di adattamento.
In Figura 1.5 si riporta il grafico della fase del coefficiente di riflessione al variare della frequenza.
-1 -0.8 -0.6 -0.4 -0.2 0 1.5 1.6 1.7 1.8 1.9 2 -90 -60 -30 0 30 60 90 R ef lec tion (d B) Ph ase ( D eg re e s) Frequency (GHz) TE TM Phase Amplitude Figura 1.5
Come si evince dalla Figura 1.5, la fase del coefficiente di riflessione è prossima allo zero tra f1=1,74 Ghz e f2=1.88 Ghz. In particolare si
annulla a f=1.78 Ghz; sarà il valore di riferimento che utilizzeremo per le nostre conclusioni.
A tale frequenza la lunghezza d’onda risulta: 168 c mm f λ = = ,
dove c è la velocità della luce nel vuoto pari a 3 108 m/sec.
1.3.2 –Superficie ad alta impedenza realizzata
mediante FSS
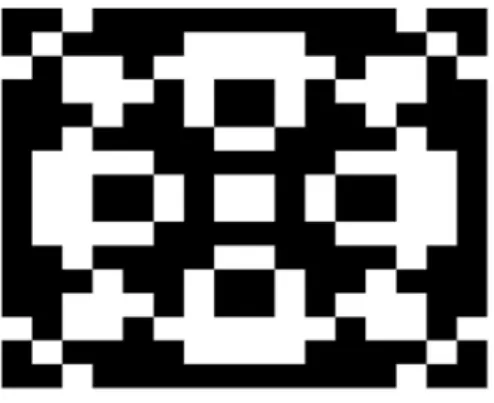
Si presenta ora la seconda superficie: questa si differenzia da quella già presentata per la presenza di uno schermo FSS posto tra gli strati dielettrici. La cella elementare che lo caratterizza è mostrata in Figura 1.6.
Figura 1.6 : Cella elementare dello schermo FSS
E’ una cella quadrata di lato T=2.8125 cm e sarà opportunamente ripetuta nel dominio a seconda delle dimensioni richieste: nel nostro caso basterà ripeterla 4 volte lungo ogni direzione, come mostrato in Figura 1.7.
Figura 1.7
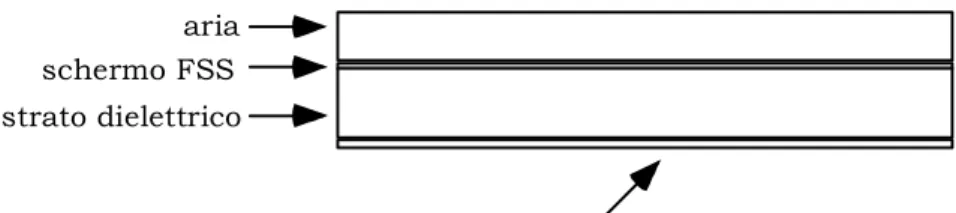
Questo schermo si appoggia sopra uno strato dielettrico di costante dielettrica r=13 e spessore t=0.508 cm. Il tutto sarà posto su un
piano di massa di tipo PEC. In Figura 1.8 si mostra la struttura complessiva.
aria
piano di massa di tipo PEC schermo FSS
strato dielettrico
Figura 1.8 : Superficie ad Alta Impedenza realizzata con FSS
Anche in questo caso ci sarà una strato d’aria tra la struttura e il dipolo che si lega all’ impedenza d’ingresso e sarà, quindi, impostato in base a questa.
In Figura 1.9 si mostra l’andamento della fase del coefficiente di riflessione. -0.1 -0.08 -0.06 -0.04 -0.02 0 -180 -120 -60 0 60 120 180 1 1.5 2 2.5 RTEdB RTMdB PRTE PRTM R ef lect ed P ower [ dB ] P ha se [ D eg rees ] Frequency [GHz]
Incidence Angle=3°, Azimuth Angle=3°
Figura 1.9
Si può notare che la fase si annulla in corrispondenza di due frequenze diverse: pertanto tale struttura ha un’applicazione dual
band e di conseguenza il nostro studio si concentrera’ attorno alle
due frequenze: f1=1,575 GHz e f2=1,96 GHz.
Alle due frequenze di lavoro si e’ deciso di lavorare a parità di resistenza di ingresso del dipolo: sfruttando il programma, già usato per la struttura precedente, si e’ calcolato, in corrispondenza di entrambe le frequenze, lo spessore dello strato d’aria. Il valore di resistenza d’ingresso scelto è: R=176 Ω.
1 190.5
c
mm f
λ = = ,
e lo spessore dello strato d’aria sarà pari a 0.908 cm. . Mentre alla frequenza f2 la lunghezza d’onda risulta
2 153 c mm f λ = =
e lo spessore dello strato d’aria sarà pari a 0.765 cm.
Confrontando gli andamenti dei coefficienti di riflessione relativi alle due strutture è evidente che il passaggio per lo zero avviene con una pendenza maggiore in questa seconda struttura, soprattutto alla frequenza f2; questo, come si vedrà nei capitoli successivi, si rifletterà