UNIVERSITÀ DEGLI STUDI DI PISA FACOLTÀ DI INGEGNERIA
CORSO DI LAUREA IN INGEGNERIA ELETTRONICA
Tesi di Laurea
Integrazione di sensori di gas in silicio
poroso con elettronica di controllo
Anno Accademico 2005/2006
RELATORI:
PROF. Paolo Bruschi ______________________ PROF. Alessandro Diligenti _________________ Ing. Giuseppe Barillaro _____________________
Candidato: Paul Gervais AVA
A ma compagne…
Glossario
ASIC Application Specific Integrated Circuit CoB Chip on Board
COTS Commercial Off The Shelve FC Flip Chip
FPGA Field Programmable Gate Array HiLeS High Level Specifications
LVDT Linear Variable Differential Transducer MCM-V Multi Chip Module - Vertical
MDA Model Driven Architecture
MEMS Micro ElectroMechanical Systems OMT Object Modeling Technique
OOD Object Oriented Design
OOSE Object Oriented Software Engineering PCB Printed Circuit Board
PIM Platform Independent Model PLD Programmable Logic Device PPM Parti Per Milione
PSM Platform Specific Model
RF Radio-Fréquence
SADT Structured Analysis and Design Technique SiP System in Package
SoC System on Chip SoP System on Package
SMT Surface Mount Tecnology SysML System Modelling Language UML Unified Modelling Language
VHDL V(HSIC)-HDL : VHSIC Hardware Description Language VHDL-AMS VHDL - Analog and Mixed Signal
Indice
Introduzione ………..9
Cap. I Sistemi su chip ……….……15
1.1 Stato dell’arte dei microsistemi di monitoraggio ………..16 1.1.1 I sensori di sorveglianza ………...16
1.1.2 Le tendenze verso la miniaturizzazione
e l’autonomia ………...19
1.2 Le applicazioni ……….……….22
1.3 Le tecniche di integrazione ………..……..23 1.3.1 Integrazione monolitica, System on chip(SoC)……25 1.3.2 Sistemi ibridi, Sip, SoP ……….…...26 1.3.3 Trasferimento SMT su circuito stampato……….…31 1.3.4 E la nostra tesi? ………...32
1.4 I criteri di prestazioni dei sistemi ..………..………32 1.4.1 Le prestazioni temporali ………...33
1.4.2 Il consumo ………34
1.4.3 La flessibilità .………...35
1.4.4 I costi ………36
Cap. II I sensori di gas; il silicio poroso ……….37
2.1 I sensori chimici ………...38
2.2 Sensori elettrochimici per gas ………..44
2.2.1 Breve storia sui sensori a semi-conduttori ……….44
2.2.2 Sensori elettrochimici per gas a stato solido ……..45
2.2.3 Materiali ceramici ossidici ……….47
2.3 L’APSFET ………...53
2.3.1 Il silicio poroso ………..53
2.3.1.1 Cenni storici ………...53
2.3.1.2 Produzione del silicio poroso ……….55
2.3.1.3 Formazione del silicio poroso ………61
2.3.1.4 Proprietà del silicio poroso ………68
2.3.1.5 Applicazioni nel campo sensoristico …….76
2.3.2 L’APSFET come nuova tipologia di sensore di gas ……….77
Indice
Cap. III Descrizione delle strutture e processi di fabbricazione ….80
3.1 Strutture del sensore all’interno del chip ……….85
3.2 Post-processing ………91
3.2.1 Apertura delle aree attive ………91
3.2.2 Realizzazione dello strato poroso ………..101
3.3 Incapsulamento del chip ………110
Cap. IV Caratterizzazione del sistema ………...115
4.1 Caratteristiche di adsorbimento ……….121 4.1.1 Adsorbimento fisico ……….115 4.1.2 Adsorbimento chimico ……….117 4.1.3 Isoterma di adsorbimento ………118 4.1.4 Potenziale di adsorbimento ………..121
4.1.5 La superficie specifica degli adsorbanti ………...122
4.2 Funzionamento del sistema ………...123
Conclusione ………...140
9
Introduzione
S
i comincia a parlare del concetto di microsistemi verso la fine degli anni80. In effetti, le tradizionali operazioni di ossidazione, di diffusione, di creazione di strati sottili per la microelettronica vengono completate con l’apparizione di tecniche di micromachining sia in volume che in superficie del silicio. Questa nuova micro-tecnologia del silicio fa intravedere enormi possibilità d’integrazione di forme geometriche più complesse, consentendo così la miniaturizzazione e l’integrazione di funzioni supplementari che siano compatibile con la presenza dei circuiti integrati. Questa possibilità di strutturazione in tre dimensioni del silicio permette la creazione di cavità, di trave, di membrane e di strutture del tipo cantilever che saranno alla base di micro dispositivi capaci di interagire con l’ambiente. Da cui il concetto di microsistemi. Così, è ormai possibile concepire dei “micro” sistemi che integrano numerose funzioni sullo stesso chip. Per esempio un sensore può essere associato all’elettronica per il trattamento del segnale, alla amplificazione, al condizionamento e infine a uno o più attuatori sia con integrazione monolitica ma più in generale mettendo insieme diversi dispositivi con delle tecnologie sofisticatissime di tipo SoP.
Le produzioni più notte sono gli accelerometri e i sensori di pressione, che sono stati essenzialmente impiegati nei settori industriali come l’automobile, l’aeronautica e l’elettrodomestica. Negli ultimi cinque anni, il settore biochimico è diventato pian piano un settore privilegiato per i microsistemi. Esiste una fortissima domanda per il miglioramento delle analisi di sostanze chimiche o il monitoraggio ambientale. I microsistemi trovano quindi un grande interesse in questo settore per il quale la domanda di sensori miniaturisti e multifunzionali va aumentando con l’evoluzione di nuove tecniche di sensing. I sistemi miniaturizzati consentono in effetti il
Introduzione 11
loro impiego in spazi di difficile accesso , delle misure poco intrusive o
ancora di sfruttare nettamente meno reagenti per le analisi.
Il campo di applicazione dei microsistemi è dunque abbastanza vasto, e la loro costruzione richiama numerosi ambiti connessi tale la meccanica, l’ottica, l’elettronica, la microfluidica (disciplina associata agli scorrimenti di fluidi all’interno di strutture di piccole dimensioni) o i processi elettrochimici sul silicio.
L’aeronautica si interessa ad esempio allo sviluppo di sensori di pressione, d’attuatori piazzati sulle automobile per modificare gli scorrimenti di residui e proporre un’alternativa ai pesanti organi idraulici convenzionali. Il settore automobilistico sta sviluppando come altro esempio dei micro-iniettori ad alta pressione per le camere di combustione, e dei micro sensori per il controllo costante della pressione delle gomme. Le stampanti commerciali sono per la maggior parte di esse costituite da micro diffusori inkjet. Ma sono sicuramente i settori della biologia, della chimica, dell’ambiente o dell’agro-alimentare che presentano il più grosso potenziale di applicazioni. La domanda di microsistemi di sensisng (gas per esempio) è grande e tanti laboratori si sono lanciati per la loro progettazione, realizzazione e ottimizzazione.
Negli ultimi anni sono stati sviluppati molti sensori di gas con elevata sensibilità capaci di monitorare con continuità la concentrazione di gas particolari nell’ambiente. Così, numerosi approcci vengono proposti per ottenere dispositivi con le proprietà tipiche di un oggetto di questo tipo (elevata sensibilità, elevata selettività, dimensione ridotte e basso costo) , e fra questi, quello dei sensori allo stato solido è forse tuttora il più soddisfacente.
La sensibilità della distribuzione dei portatori liberi in un semiconduttore nei confronti dell’assorbimento di specie chimiche sulla sua superficie, ha indicato la possibilità di utilizzare questo materiale per la
produzione di sensori di gas allo stato solido. I vantaggi maggiori dei
sensori allo stato solido sono la semplicità di funzionamento, le ridotte dimensioni e i bassi costi di progettazione. Inoltre, il ricorso a materiali e processi di fabbricazione compatibili con le tecnologie dei circuiti integrati (IC) consente la possibilità di integrare sullo stesso chip anche l’elettronica di condizionamento, a vantaggio della riduzione delle dimensioni e dei costi di produzione.
Se è vero che ricorrere ad ossidi semiconduttori come strato sensibile può rivelarsi una scelta semplice e economica, tuttavia l’elevata temperatura di esercizio richiesta per un loro buon funzionamento e la loro scarsa stabilità costituiscono motivi validi per la ricerca di materiali alternativi come il silicio poroso.
L’elevato rapporto superficie/volume (centinaia di m²/cm³), la notevole reattività e la potenziale compatibilità con l’elettronica del silicio, fanno del silicio poroso uno dei materiali più promettenti per la produzione di sensori di gas. Dispositivi basati su tale materiale, ottenuto mediante un attacco elettrochimico del silicio in soluzione acquosa di acido fluoridrico, sono stati proposti come sensori di umidità, di NOx e di varie sostanze organiche polari. I meccanismi alla base della sensibilità evidenziata sono in genere associati ad una variazione della concentrazione delle cariche libere nello strato di silicio poroso per effetto delle molecole adsorbite, o ad una variazione della permittività a causa della condensazione del gas nei pori, la proprietà elettrica “sensibile” risulta, anche in questo caso, una conducibilità o una permittività.
Nonostante l’elevato numero di sensori in silicio poroso sviluppati negli ultimi anni, il grosso difetto delle soluzioni proposte è la scarsa compatibilità del loro processo di fabbricazione con le tecnologie standard
IC. Effettuare il processo di anodizzazione, con cui si realizza il silicio
Introduzione 13
problemi di compatibilità principalmente per due motivi : (i) possibili
contaminazioni del wafer e degli impianti di produzione da parte dallo strato di silicio poroso (ad esempio durante la deposizione del contatto metallico sullo strato poroso); (ii) difficoltà del silicio poroso a sopportare i passi termici standard e/o di etching.
In questo contesto, la contribuzione di questa tesi dovrà essere la presentazione di un modello di integrazione volto a risolvere i diversi problemi di compatibilità citati nel precedente paragrafo. Proporremo infatti delle tecniche di progettazione che consentono di eliminare i fattori di incompatibilità mediante la lavorazione del silicio in fase di post-processing per la realizzazione di componenti in PS. Illustreremo in modo dettagliato un esempio nel settore dei SoC per monitoraggio, con un sistema dotato di tutta l’elettronica di bordo per il condizionamento, il trattamento del segnale proveniente da una serie di sensori di gas. Il sistema dovrà essere in grado di fornire una diagnosi in-situ, il tutto in completa autonomia.
Questo documento si articola in quattro parti.
Nel primo capitolo, presenteremo il contesto di questo lavoro di tesi nell’ambito più generale della progettazione dei sistemi on chip. Ricorderemo qualche criterio di prestazioni da tenere in considerazione durante la preparazione del progetto.
Il secondo capitolo sarà consacrato alla presentazione dello stato dell’arte nella fabbricazione dei sensori di gas e in particolare i sensori a base di silicio poroso.
Proseguiremo questo lavoro de tesi col presentare, nel capitolo 3, i nostri oggetti (i componenti realizzati) e i diversi passi dei processi utilizzati per la loro realizzazione.
Il quarto capitolo per canto suo, sarà riservato alla caratterizzazione sia dei sensori stessi che quella del sistema nel suo complesso.
Per finire, presenteremo le nostre conclusioni rispetto alle
problematiche evocate prima e proporremo delle prospettive a nuovi studi di ricerca per migliorare il sistema proposto.
15
Capitolo I
Presenteremo in questo primo capitolo il contesto di questa tesi presentando per cominciare lo stato dell’arte nei microsistemi per monitoraggio. Vedremmo in quali applicazioni rientrano e poi illustreremo qualche tecniche di integrazione per questi sistemi. Infine parleremo dei criteri di prestazioni con i quali questi sistemi possono essere valutati.
1.1 Stato dell’arte dei microsistemi di monitoraggio
Esistono da sempre dei sensori che servono alla misura e gli automatismi a loro associati. Noi qui ci interessiamo a dei sensori messi, a margine degli automatismi, per servire unicamente come funzione di sorveglianza. La sorveglianza di sistemi è una problematica generale la cui criticità è inerente alla complessità sempre più crescente. L’idea è di impiantare un livello di sorveglianza supplementare (supervisione) costituita di sensori e di un organo di diagnosi per avvertire l’utente di qualsiasi anomalia di comportamento, o errore di funzionamento. Il monitoraggio così percepita è il nocciolo della problematica dell’applicazione che presentiamo in questo lavoro di tesi. Cioè una sorveglianza concepita come un livello di sorveglianza esterna a un macro-sistema principale, e noi insisteremmo su l’interesse di miniaturizzazione, di autonomia in termine di comunicazione di energia.
1.1.1 I sensori di sorveglianza
I micro-sensori rappresentano gli elementi sensibili che andranno a rilevare e convertire i fenomeni fisici in segnali identificabili e misurabili. Essi danno una percezione dell’ambiente in cui sono collocati. I sensori possono essere classificati in due grandi famiglie secondo S.M. Sze [1], i sensori auto-generati e
Sistemi su chip 17
i sensori di modulazione. Prendiamo due esempi per illustrare queste due famiglie di sensori :
• Una termocoppia ove una variazione di temperature (∆T) produce una differenza di potenziale direttamente misurabile. Appartiene quindi alla famiglia di sensori auto-generati perché il segnale captato è la sorgente stessa di energia che fornisce il segnale elettrico di uscita. • Una resistenza di platino alimentata con una corrente costante dove un
∆T produce una variazione di resistenza rilevabile con una variazione di tensione ai sui terminali. Essa appartiene dunque alla famiglia di sensori di modulazione visto che il segnale captato modula un segnale fornito dal sistema.
I sensori auto-generati hanno il grande vantaggio di non dipendere da un segnale esterno e quindi di risparmiare in energia, il che può rivelarsi importantissimo per i sistemi di monitoraggio.
I sensori sono gli strumenti usuali della misura e del controllo automatico. Essi prelevano l’informazione che una volta filtrata serve alla definizione di una azione o comando. Nelle applicazioni legate alla sorveglianza, i sensori devono essere precisi, fedeli e affidabili per quanto possibile. Questa a definito una industria della strumentazione e del controllo automatico che ha giocato un ruolo consistente nello sviluppo industriale.
I sensori sono utilizzati « da sempre » ai fini di monitoraggio di processi di fabbricazione industriali, tramite parametri ambientali come la temperatura, la pressione, la velocità, la coppia, e per quanto ci interessa in particolare nella tesi proposta le concentrazioni (ad esempio di gas).
Le microtecnologie, basate sull’utilizzo del silicio come substrato, hanno largamente beneficiato dei progressi fatti nel settore della microelettronica dagli anni 70. Parte dagli anni 80, l’interesse della comunità scientifica alle lavorazioni in volume del silicio per vie chimiche, fisiche o meccaniche. Queste
tipo cantilever, trave o membrane. Una realizzazione più complessa è stata quella di un micromotore che ha dimostrato le possibilità di queste micotecnologie sul silicio. Da un punto di vista generale, queste strutture possono essere utilizzate seguendo due assi :
9 Possono essere passive e soggette alle sollecitazioni dell’ambiente che le circonda, in tal caso esse rappresentano un elemento sensibile, che sonda l’ambiente.
9 Vice versa possono essere azionate da forze elettrostatiche comandate, in quel caso, fanno allora parte della famiglia degli attuatori.
Noi, ci interessiamo alla prima famiglia che propone una alternativa o delle nuove applicazioni al settore attuale della sorveglianza e della misura.
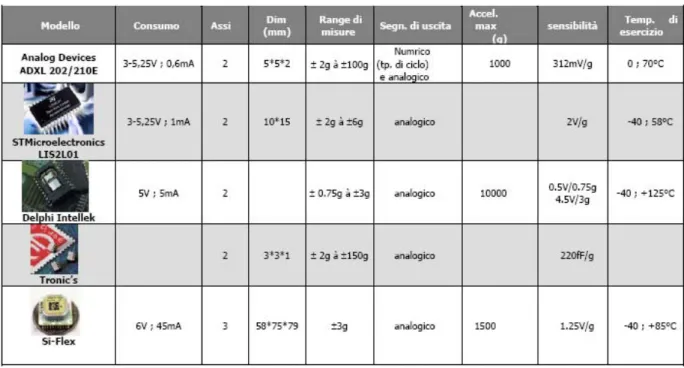
Il riutilizzo dei processi tecnologici comuni alla microelettronica attribuisce alle microlavorazioni i vantaggi di costi ridottissimi, legati alla fabbricazione di massa dell’industria microelettronica e una compattezza d’integrazione che ha aperto le porte, da una decine d’anni , il mercato dei microsensori. Uno dei primi esempi di micosensori commercializzati in massa è l’accelerometro di Analog Device (ADXL202), utilizzato per rilevare un urto e aprire gli « airbags » delle macchine. La tabella 1-1 dà un esempio di qualche microsensori di accelerazione che sono commercializzati al costo medio di 15 Euro l’unità.
La compattezza e il basso costo sono dei vantaggi determinanti che i microsensori hanno portato al settore della misura. Questi due vantaggi hanno permesso ai microsensori di essere utilizzati in numero elevatissimo e in modo quasi invisibile per il loro ambiente diretto.
Sistemi su chip 19
Tabella 1-1 : Confronto tra microsensori di accelerazione.
Una prospettiva aperta per questi microsensori è quindi la possibilità di stabilire una diagnosi in loco. I microsensori sono allora dotati di una « intelligenza » con l’aggiunto di una analisi del segnale e di una decisione in-situ. Questa localizzazione del trattamento dell’informazione il più vicino possibile alla sorgente porta una sicurezza supplementare al sistema nei domini di applicazione dove la mobilità e l’autonomia, in termine di presa di decisione, hanno una importanza considerabile.
Nel prossimo paragrafo, ci appoggeremo su l’esempio di qualche applicazioni di sistemi di monitoraggio recentemente sviluppati e che hanno sfruttato i progressi delle microtecnologie.
1.1.2 Le tendenze verso la miniaturizzazione e l’autonomia
È all’inizio degli anni 1990 che si sono poste le basi della problematica del raggruppamento di più microsensori sullo stesso chip con K.D. Wise [2]. Lo studio porta prima sulla compatibilità dei processi tecnologici di fabbricazione delle parti sensori e del trattamento del segnale. L’obiettivo è di avvicinare il più possibile alla parte sensibile, un primo stadio dei trattamento del segnale
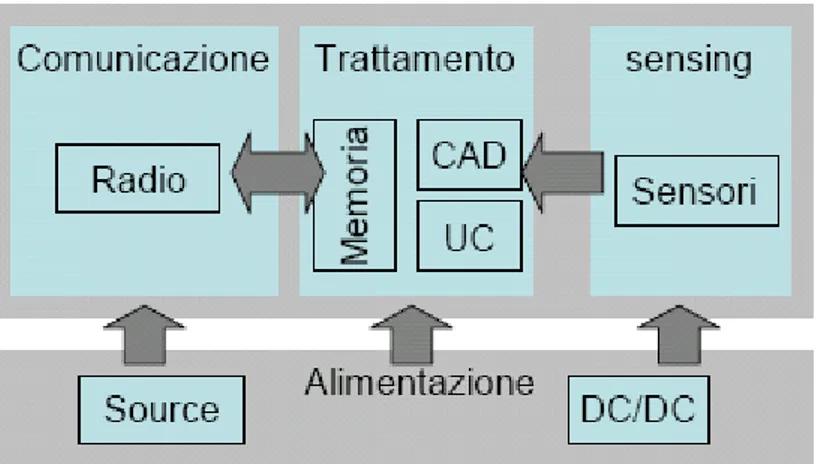
(amplificazione, multiplexing, filtraggio) portando anche un primo valor aggiunto al condizionamento del segnale. Qualche anni più tardi, negli anni 2000, il lancio del progetto Smart Dust da K. Pister [3] tenta di realizzare un raggruppamento di microsensori sullo stesso chip. L’obiettivo è di integrare un sistema di trattamento del segnale e di aggiungerci un mezzo di comunicazione. I temi affrontati da questa nuova problematica sono di diversi tipi, riguardano principalmente, dal punto di vista informatico, la gestione dell’energia consumata dal sistema durante la sua attività di calcolo autonomo [4], l’integrazione di microsensori vari e i mezzi di comunicazione e di trasmissione dell’informazione. Le numerose ricerche sul piano internazionale hanno condotto, in questi tre settori, alla nascita di una prima generazione di sistemi avanzati. Più sistemi sono sviluppati sulla stessa base architettonica : sensori, condizionamento del segnale, trattamento del segnale, memoria, comunicazione (Figura 1.1). L’esistenza di una architettura di base invita a preparare un approccio specifico della progettazione. Motivo per il quale molti centri di ricerca ci stanno lavorando.
FIG. 1.1- Architettura di base dei microsistemi.
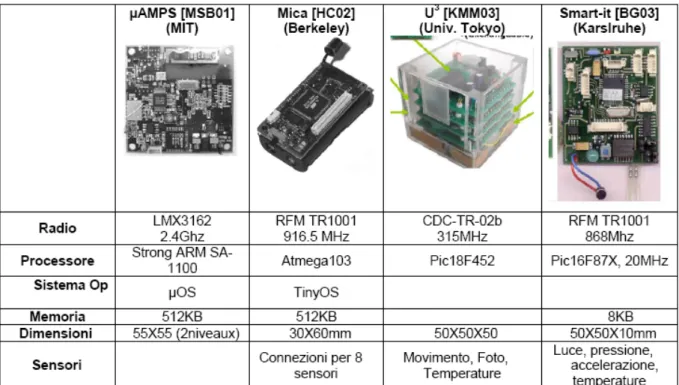
La tabella 1-2 presenta questa prima generazione di sistemi che hanno preso per base questa stessa configurazione architettonica. Questi sistemi hanno presso che le stessi dimensioni. Sono contenuti all’interno di un cubo di qualche cm di lato. E pure, ogni team ha scelto di progettare il suo prototipo su una base
Sistemi su chip 21
microprocessore/radio ben diversa. Queste scelte dipendono da parametri come l’applicazione mirata, la quantità di informazione da trattare, la velocità di reazione auspicata ai nodi della rete, la durata di vita, l’estensione spaziale della rette, ecc.
Tabella 1-2 : Prima generazione di sistemi multi-sensori communicanti. Da allora, questi progetti hanno generato una creatività visibile dal punto di vista industriale attraverso delle società come Chipcon, Ember, e CrossBow, che propongono dei servizi o dei prodotti legati ai settori rispettivi della comunicazione, del software, e dell’integrazione.
Nonostante tutto, rimane un aspetto importante che è la sfida già di oggi e di domani, ed è quella dell’autonomia. Vediamo attorno a noi numerosi applicazioni multimediali legate alla portabilità e alla mobilità di oggetti. Questo concetto ormai maturo, deve però confrontarsi con l’autonomia spesso in questi casi di relativa corta durata (qualche giorno). Per di più, necessita l’uso di una sorgente murale regolare. Mentre, le applicazioni richiamando dei oggetti intelligenti e autonomi adoperati in maniera vasta nel nostro ambiente troveranno il giusto credito soltanto se disponiamo di sorgenti di energie
sufficienti o rinnovabili per alimentarle durante loro intero periodo di vita. Una grande varietà di metodi di alimentazione dei microsistemi in energia è in fase di studio. Possono essere classificati in due gruppi [5] : da una parte, le sorgenti locali di una capacità nominale fissa (le micro-batterie, le pile a combustibili, gli accumulatori), e dall’atra parte, le sorgente rinnovabili che sono associati al loro ambiente per rigenerarsi (l’energia fotonica, le vibrazioni, le vibrazioni, le onde elettromagnetiche, i raggi ß, i flussi eolici). Questo ultimo gruppo è attualmente emergente, in particolare per le applicazioni di piccole dimensioni chi ci interessano. Questa colletta di energia nel ambiente aprono delle nuove problematiche di conversione dell’energia legate alle scale millimetriche.
1.2 Le applicazioni
Le applicazioni riguardano numerosi settore di attività, come, l’agricolture, l’ambiente, o le reti di sicurezza pubblica in generale :
- per l’agricoltura : lo studio fatto sulle reti di microsistemi in questo settore [6] ha dimostrato che tali sistemi saranno quanto più interessanti che le reti possono essere istallati e modificati a piacere durante le diverse stagioni. Le reti porterebbero un interesse nella gestione dell’acqua, la prevenzione nelle derive climatiche, l’igrometria, e un data base sul quale potranno discutere le contro-parti implicate (proprietari, operatori agricoli).
- Per l’ambiente, gli ecosistemi : le reti di microsistemi permettono di sorvegliare delle zone altrimenti non facilmente raggiungibili o abbastanza confinate [7] senza comprometterne gli equilibri. La sorveglianza delle zone acquatiche è anche stata paventata [8].
- Per la sanità : le reti di assistenza medicale [9], permettono di seguire in diretta, e di svelare le variazioni di parametri fisiologici vitali di un
Sistemi su chip 23
crisi, o reagire tempestivamente di fronte a una allerta (il caso di un peggioramento).
Alcuni centri di ricerca dagli anni 90 hanno invece contribuiti allo sviluppo di applicazioni microsistemi legati all’industria automobile [10], per venire in contro alle esigenze delle persone anziane [11], al conforto termico negli abitacoli. Nel settore delle infrastrutture che è un altro dominio molto promettente.
Andiamo a presentare nel prossimo paragrafo lo stato delle tecniche di integrazione microsistemi attualmente accessibili.
1.3 Le tecniche di integrazione
La via di integrazione monolitica scelta da Analog Device (con il
componente ADXL) non è sempre possibile e spesso bisogna puntare su delle tecniche di assemblaggio SiP o System in Package. Questo assemblaggio, in senso lato, gioca un ruolo molto importante nel settore dell’elettronica per la miniaturizzazione dei sistemi. La sua importanza è strategica e la progettazione non proprio banale quando si tratta di integrare dei sistemi eterogenei.
In ogni caso, l’integrazione o l’assemblaggio di sistemi eterogenei rimane delicato da realizzare perché bisogna fare in modo che ogni componente mantenga le sue caratteristiche nominali di funzionamento tenendo conto delle interazioni con gli altri elementi del sistema. Motivo per il quale, la progettazione deve tenere conto a punto di un certo numero di fattori vincolanti nella fabbricazione di sistemi eterogenei :
- La compatibilità tecnologica (interazione tra i processi di fabbricazione), - La compatibilità funzionale (compatibilità elettromagnetica, termica,
reattività chimica),
- Le proprietà meccaniche specifiche (deformazione, attriti).
Oltre ai vincoli di assemblaggio correnti noti per i circuiti integrati elettronici, i microsistemi necessitano spesso lo sviluppo di nuove pratiche di incapsulamento che tengano conto delle specifiche MEMS. Citeremo come esempio la creazione di una cavità di dimensioni sufficiente per permettere il movimento di parti mobili di attuatori o di strutture meccaniche sospese. Altri vincoli propri ai MEMS possono citati : protezione antivibratori per le strutture libere di silicio, protezione termica, protezione ottica, protezione chimica, bio-compatibilità per i sistemi utilizzati in biochimica, farmacia, alimentari.
L’assemblaggio di sistemi complessi beneficia di uno sforzo di miniaturizzazione in superficie e in volume presenti a tutti i livelli, dalla scala nanometrica fino alla scala dei centimetri. L’ottimizzazione dello spazio si fa a livello delle strutture micrometriche sul chip di silicio e prosegue a livello dell’arrangiamento dei chip di silicio all’interno dei package di dimensioni millimetriche, poi alla tappa di assemblaggio di questi circuiti integrati sui circuiti stampati che sono dell’ordine dei centimetri.
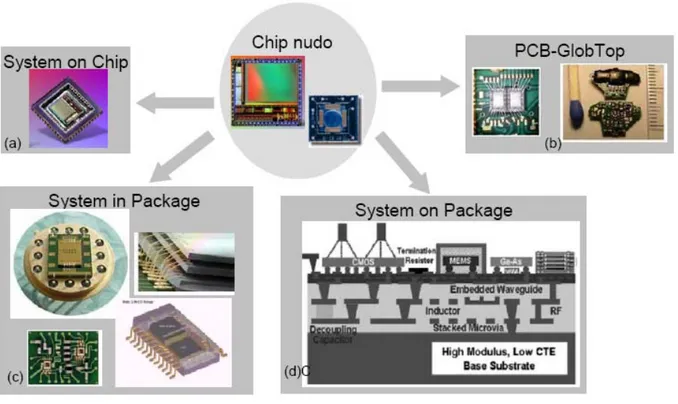
Presenteremo adesso le tecniche attuali utilizzate per il condizionamento e l’integrazione di un chip di silicio nudo all’interno di un sistema. Affronteremo l’integrazione monolitica (SoC), l’integrazione ibrida (SiP) e l’integrazione emergente che propone di rendere l’integrazione funzione del package (System on Package, SoP). La figura 1.2 presenta una illustrazione de queste tecniche. Analizzeremo in seguito ma sommariamente la tecnica classica di montaggio dei componenti sotto forma di blocchi alla superficie di una carta di circuiti stampanti. Le soluzioni proposte si differenziano per le reciproche organizzazioni degli elementi passivi (capacità, resistenze, filtri, ecc.) che formano il sistema completo auspicato.
Concluderemo parlando degli interessi e le possibilità che offrono questi mezzi attuali di integrazione per la progettazione di un sistema compatto,
Sistemi su chip 25
ricordando però ancor una volta in quale contesto viene situato il nostro lavoro di tesi.
FIG. 1.2- Quattro tecniche d’integrazione di chip.
1.3.1 Integrazione monolitica, System on Chip (SoC)
Questa tecnologia di assemblaggio sistema su chip, illustrato con un sensore Motorola MCM20014 (Figura 1.2(a)), è essenzialmente utilizzata per la realizzazione di sistemi la cui tecnica di fabbricazione è compatibile con la filiera CMOS (Complementary Metal Oxide Semiconductor) della microelettronica. Si tratta dell’integrazione, sullo stesso substrato di silicio, di strutture planari a strati sottili o di strutture volumetriche di silicio realizzate con attacco chimico o plasma. Queste tecniche sono impiegate per realizzare delle funzioni analogiche, numeriche, radio-frequenze, meccaniche o ottiche in modo da produrre dei MEMS, dei MEMS RF (MEMS Radio-Frequenze), e dei MOEMS (MEMS ottici). Questa integrazione necessita un grande investimento
di progettazione ed è praticabile soltanto per dei sistemi prodotti in grosse quantità.
1.3.2 Sistemi ibridi, SiP, SoP
Chip on Board (chip su circuito, CoB)
Il metodo, il più comune di interconnessione è il Chip on Board : il chip di silicio viene direttamente incollato sulla carta detto circuito stampato, poi legato a questo ultimo con delle saldature di fili di alluminio o fili di oro. Una resina di incapsulamento (Glop top) può a questo punto essere estesa sull’insieme o soltanto su una parte del sistema per garantire la protezione nei rispetto dell’ambiente : vincoli termici e meccanici. La figura 1.2(b) rappresenta un esempio di realizzazione di assemblaggio CoB. La parte sinistra della figura rappresenta un chip di silicio incollato direttamente sul circuito stampato mentre la parte destra rappresenta un chip ricoperto da una resina protettrice.
System in Package (SiP)
Si tratta di un metodo di integrazione abbastanza addomesticato oggi. Consiste nell’integrazione di sistemi 2D in un package unico. E permette, quando la tecnica di integrazione monolitica SoC diventa troppo complessa e costosa, di raggruppare a costi bassi, su un singolo substrato organico, più circuiti integrati di silicio. Questi chip di silicio possono essere associati a dei componenti passivi, dei sensori e attuatori. I substrati a base di polimeri morbidi hanno consentito delle funzionalità supplementari : la flessibilità meccanica e l’assorbimento dei urti che permettono la realizzazione di moduli più ergonomici e più adatti alle applicazioni portatili.
Sistemi su chip 27
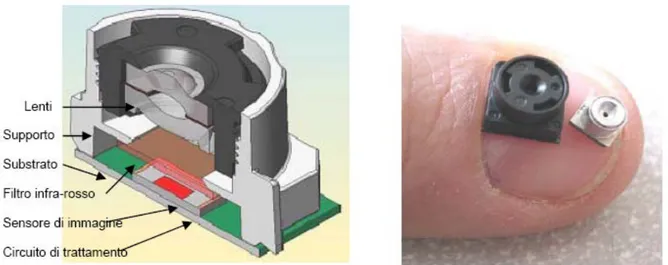
La figura 1.3 illustra l’utilizzo dell’integrazione SiP per la realizzazione di una mico-camera. Questo tipo di camera è largamente usato oggi all’interno dei cellulari, degli apparecchi di sorveglianza, dei PDA, alcuni giocatoli, ecc. Vediamo qui che i chip di silicio del sensore di immagine sono impiantati su un circuito di trattamento che è a sua volta realizzato su un substrato organico.
FIG. 1.3- Modulo di una camera integrata, vista in sessione a sinistra e vista del
prodotto a destra. (STMicroelectronics).
Multi Chip Module (moduli multi chip, MCM-V)
Durante l’incapsulamento del componente di silicio, è possibile inter-connettere più componenti nello stesso package, questo è l’integrazione ibrida multi-chip. Una volta messo su package standard, questo assemblaggio di chip di silicio può essere trasportato sotto forma di sotto-sistema compatto.
L’integrazione ibrida punta all’utilizzo di materiali e componenti di origini tecnologici molto diverse. Il progetto europeo BARMINT [12], ha avuto per ambizione di identificare e di sviluppare delle metodologie di progettazione, di strumenti e di tecnologie necessari alla fabbricazione di microsistemi multifunzionali. Il progetto ha dato la luce a un sistema dimostrativo dove
venivano affrontati i problemi centrali della compatibilità di sistemi eterogenei che fanno intervenire più settori tecnologici. Il sistema comprendeva delle funzionalità ottiche, meccaniche e chimiche. In più, le tecniche di assemblaggio 3D e monolitiche, per associare MEMS e trattamento elettronico sullo stesso substrato di silicio, sono state studiate.
Il processo consiste in una sovrapposizione di chip nudi di silicio incollati gli uni agli altri e interconnessi tra di loro. La densità di assemblaggio è così rinforzata. Questa tecnica è chiamata Multi Chip Module (MCM-V). la difficoltà della sovrapposizione dei chip è l’interconnessione di livelli. L’assemblaggio BARMINT applicherebbe un processo Thomson Original basato sul ricoprimento in resine e delle fotolitografie laterale. La figura 1.2(c), presenta : in alto due immagini di un assemblaggio MCM-V, ove le connessioni elettriche sono semplicemente filari [13], in basso a destra una vista 3D di questo tipo di sovrapposizione inserito dentro ad un package standard da montare in superficie, e in basso a sinistra un mini-circuito dove i chip di silicio sono associati a degli elementi passivi prima della loro introduzione in package standard [14]. Aldilà però della dimostrazione di fattibilità tecnologica di microsistemi compatti basati su dei assemblaggi 3D, resta il risultato importante che riguarda l’interesse di lanciare e di sviluppare delle metodologie di progettazione di sistemi eterogenei imbarcati : strumenti CAD per i microsistemi, simulazioni 3D termo-elettrica e termo-meccanica.
System on Package (SoP)
Il concetto di SoP porta l’idea di integrare in volume del substrato, fino allora utilizzati essenzialmente per le connessioni elettriche, delle funzioni passive del tipo capacità, induttanze, filtri che partecipano alle funzionalità generali del sistema. La figura 1.2(d) [15] illustra il concetto di un substrato che integra le funzionalità RF e ottiche, sulla quale superficie dei chip sono montati
Sistemi su chip 29
rovesciati. Come l’assemblaggio MCM-V, questa tecnica è una integrazione in 3D. questa dimensione supplementare è formata dalla sovrapposizione di strati di substrati organici ai quali a priori è stato assegnato una determinata funzione. Tra i metodi di affinamento dei assemblaggi 3D, troviamo due tecniche : una classicamente impiegata : il chip rovesciato (Flip Chip), e l’altra allo stato di ricerca : i chip assottigliati.
Flip Chip (chip rovesciato, FC)
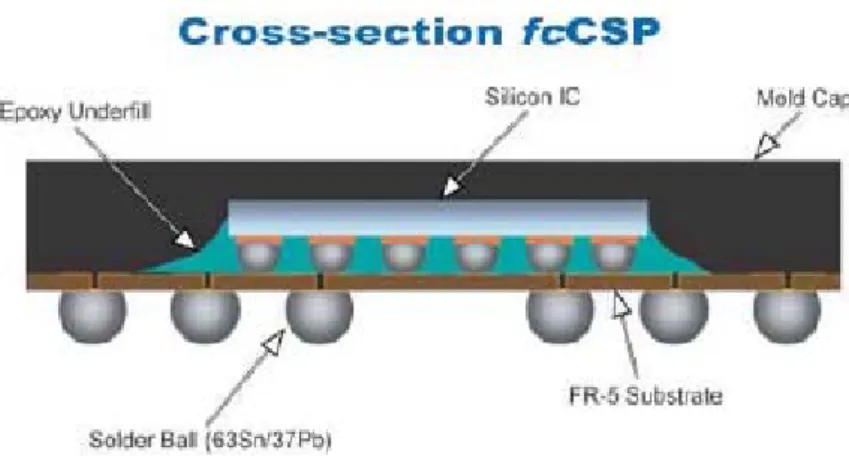
L’innovazione che ha marcato la rottura nelle dimensioni dei contenitori per chip e la densità di integrazione è certamente quella dell’assemblaggio chip rovesciato. Il chip di silicio è rovesciato e i pad di contatti del chip sono direttamente collegati alle connessioni del contenitore. Questa connessione ultracorta permette di limitare le perdite resistite e capacitive dovute ai fili, un fatto molto importante nel caso di applicazioni ad alte frequenze. La figura 1.4. [16] illustra una vista in sezione di un chip montato rovesciato (Flip-Chip) in un contenitore BGA (Ball Grid Array) che propone anche il concetto Flip Chip. Vediamo qui, l’integrazione Flip Chip è stato realizzato a due livelli : chip di silicio e componente per limitare al massimo l’ingombro dei fili di connessione.
FIG. 1.4- Chip montato secondo la tecnica Flip-Chip
Integrazione di strutture assottigliati
L’assemblaggio di componenti assottigliati è una tecnologia emergente che presenta per alcune applicazioni numerosi vantaggi : minimizzazione del peso e del volume, riduzione della potenza consumata, crescita della densità d’interconnessioni.
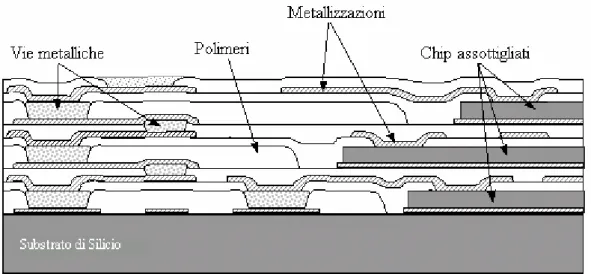
Le tecnologie di interconnessioni in strati sottili possono essere applicate ai assemblaggi elettronici per dei substrati assottigliati a qualche micrometri. La figura 1.5 è una vista in sessione di un assemblaggio di tre chip assottigliati su un substrato di silicio.
FIG. 1.5- Ultra Thin Chip Stacking
Questo paragrafo ha mostrato come l’integrazione sia un lavoro a tutti i livelli di scala di dimensioni per arrivare ad ottimizzare la densità di funzioni di un microsistema. Le tecnologie disponibili oggi sono multiple, abbiamo visto il “Chip on Board”, il “Multi Chip Module”, il “Flip Chip”, l’integrazione di strutture assottigliate e il “System on Chip”. Ognuna di queste tecniche può essere considerata come uno strumento per ridurre le dimensioni di un assemblaggio multi-chip, il che da la possibilità di spingere un assemblaggio compatto in 3D.
Sistemi su chip 31
1.3.3 Trasferimento SMT su circuito stampato
Durante questi ultimi anni, abbiamo potuto assistere a un passaggio continuativo dall’IMT (Insert Mount Technology) che è il montaggio classico dei componenti con inserzione sui circuiti stampati, alla SMT (Surface Mount Technology) che è un montaggio dei componenti sulla superficie del circuito stampato.
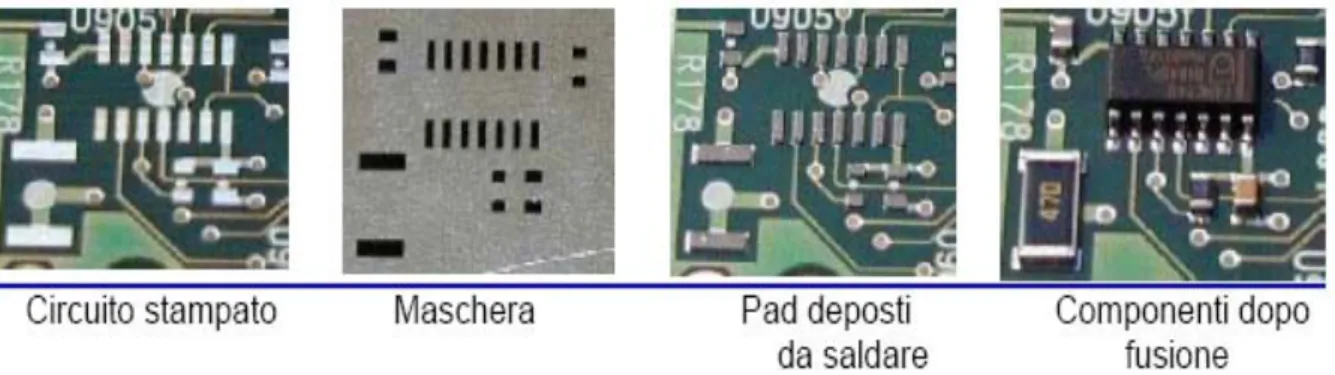
È ormai corrente l’utilizzo di circuiti stampati composti da una ventina di strati sovrapposti di piste conduttrici per uno spessore totale di soltanto 2,5 mm [17]. Questa architettura è stata sviluppata parallelamente ai contenitori BGA (Ball Grid Array) che hanno molte decine di connessioni per centimetro quadro. Il componente commercializzata per Synetics avendo 1232 contatti su 4 cm² [18] è un esempio di densità di connessioni possibili su un circuito stampato. Il vantaggio di un SMT è che permette di intensificare l’impiantazione su un circuito stampato visto che si può impiantare dei componenti su ciascuna delle facce. Però, necessita una strumentazione abbastanza specializzata per la sua realizzazione , che è più vincolante e più complessa che la strumentazione utilizzata per i componenti che attraversano il circuito stampato. La saldatura è fata con serigrafia ai punti di contatto dei componenti, la figura 1.6 mostra i principali tape di montaggio di un SMT.
1.3.4 E la nostra tesi?
I metodi di integrazione esposti in questi paragrafi precedenti trattano per la gran parte dei sistemi elettronici complessi. La tecnologia SoC permette di realizzare in maniera molto compatto un sistema su un singolo substrato di silicio. Questo guadagno in compattezza ha un effetto non trascurabile durante la fase di progettazione, visto che l’aumento della complessità del sistema necessita più lavoro di progettazione a monte, come degli studi di affidabilità e di compatibilità dei circuiti misti integrati su chip. Questo lungo periodo di progettazione rallenta di fatto la messa in vendita del prodotto sul mercato. Inoltre, il prodotto rimane difficilmente modificabile una volta fabbricato. Però, in un’ottica di produzione di massa, il prezzo unitario di ogni componente diminuisce rapidamente e diventa allora redditizio.
La problematica che ci riguarda è quella dei sistemi eterogenei che consistono in un raggruppamento di funzioni di tipo analogico, logico, elettrochimiche. Se è vero che, per sistemi più complessi l’integrazione sul singolo substrato non sarebbe da considerare al vantaggio dei sistemi di tipo SoP, nel nostra caso tuttavia riteniamo sia possibile ottenere risultati importanti basandoci unicamente su tecnologie di tipo SoC. in effetti ci proponiamo di realizzare l’intero sistema comprensivo di sensori e tutta l’elettronica necessaria su un unico substrato si silicio.
1.4 I criteri di prestazioni dei sistemi
Uno dei aspetti fondamentali di un sistema e che funzioni correttamente secondo le prestazioni fissate durante la fase di definizione delle specifiche. Le prestazioni di un SoC possono essere analizzate seguendo tanti criteri che ci proponiamo di esplicitare qui.
Sistemi su chip 33
1.4.1 Le prestazioni temporali
Questo primo criterio concerne tutti gli « aspetti temporali » di un sistema. Questi cui possono di diversi ordini. Da un punto di vista globale, si può dire che un sistema A è n volte più veloce di un sistema B per un determinato compito se : n A uzione e di Tempo B uzione e di Tempo = ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ sec sec
Il tempo di esecuzione è dunque il primo elemento che si osserva per valutare le prestazioni di un sistema. Il tempo di esecuzione si può scrivere come una funzione della latenza e della cadenza. Per un determinato compito, la latenza L corrisponde al tempo messo dal sistema fra l’acquisizione di una entrata e la produzione della prima uscita. La cadenza C invece caratterizza il ritmo al quale il sistema produce ciascuna delle sue uscita (il numero di campioni prodotti al secondo). Il numero di campioni trattati è N. a secondo di quello che si cerca di osservare, il tempo di esecuzione può anche essere riferito a più compiti. Così, la cadenza può corrispondere al numero di compiti trattati/secondo.
Tempo di esecuzione (secondi) = L + C N
Nei sistemi tempo reale, i trattamenti presi in considerazione sono vincolati da scadenze di trattamento. Il controllo del processo industriale o ancora i sistemi di sicurezza sono applicazioni di sistemi tempi reali e fanno parte dei numerosi target potenziali dei processori sepolti. Per rispettare i vincoli di tempo reale, è necessario che un compito sia trattato in un tempo inferiore o quanto meno uguale a quello imposto dal commissionario. Spesso è necessario, in questi casi, diminuire la latenza e/o aumentare la cadenza del trattamento del sistema. Questi parametri dipendono a volte dalla maniera con la quale
1.4.2 Il consumo
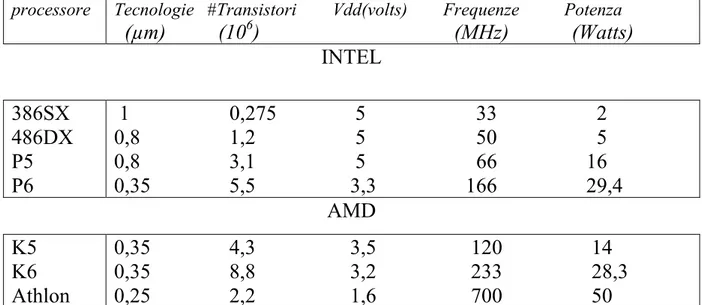
Il termine consumo raggruppa le dissipazioni di potenza e di energia. Durante la fase di progettazione, il consumo di energia è studiato per dimensionare le batterie del sistema (durata di vita)[19]. Questa ultima è ovviamente legata alla potenza assorbita dall’applicazione ma anche al tempo di esecuzione. Inoltre, l’analisi del consumo di potenza permette di anticipare sulle dissipazioni termiche, per progettare i circuiti di raffreddamento (soprattutto per le applicazioni imbarcate, dove il sistema di raffreddamento richiede una superficie, una massa e un costo non trascurabili). La potenza complessiva è composta da due termini, un primo per la potenza statica (corrente di fuga) e un altro per la potenza dinamica (commutazioni dei transistori), calcolato ne modo seguente :
P(W) = α * Ceq * F * Vdd2
La potenza dinamica è direttamente funzione del tasso di commutazione del circuito α , della capacità equivalente Ceq del circuito, della frequenza di funzionamento F e della tensione di alimentazione Vdd al quadrato. Da un lato, la capacità equivalente dei circuiti e le frequenze di funzionamento tendono piuttosto ad aumentare. Dall’altro, le tensioni di alimentazione diminuiscono con l’aumento della finezza di incisione. Questo parametro intervenendo al quadrato nella formula precedente, l’effetto della diminuzione delle tensioni di alimentazione ha dunque un impatto importante. Tuttavia, come lo mostra la tabella 1-3, questa diminuzione non è abbastanza importante per controbilanciare l’aumento del consumo dovuto agli altri parametri e quello dovuto alle correnti di fuga (potenza statica).
Sistemi su chip 35
INTEL
processore Tecnologie #Transistori Vdd(volts) Frequenze Potenza
(µm) (106) (MHz) (Watts) 386SX 486DX P5 AMD P6 1 0,275 5 33 2 0,8 1,2 5 50 5 0,8 3,1 5 66 16 0,35 5,5 3,3 166 29,4 K5 K6 Athlon 0,35 4,3 3,5 120 14 0,35 8,8 3,2 233 28,3 0,25 2,2 1,6 700 50
Tabella 1-3 : Evoluzione del consumo delle famiglie di processori INTEL e AMD
[Bur01].
Il consumo resta un punto criterio visto che provoca una dissipazione termica che non è sempre facile a evacuare. Il costo dei sistemi di raffreddamento, le loro dimensioni e il loro peso costituiscono tanti handicap per le applicazioni portatili. In oltre, il riscaldamento dei componenti provoca a sua volta un invecchiamento prematuro dei componenti [20]. Infine, le capacità delle batterie evolvendosi molto più lentamente che il bisogno di potenza delle applicazioni, la presa in considerazione di questo criterio sembra indispensabile.
1.4.3 La flessibilità
Si intende con flessibilità la possibilità di evoluzione o di adattamento di un sistema. Non è sempre possibile prevedere tutte le applicazioni che un sistema dovrà prendere in carica. Un criterio indiretto di prestazioni è dunque la capacità di un sistema a poter adattarsi a diverse applicazioni. In effetti, questa flessibilità può permettere di prolungare la durata di vita di un sistema facendolo evolvere
verso delle nuove applicazioni, nuovi standard o nuove norme che appaiono sul mercato.
1.4.4 I costi
I costi sono anche loro, indirettamente, dei fattori di prestazioni. È evidente che un sistema veloce quanto un altro ma meno oneroso sarà considerato come soluzione più conveniente : possiamo allora considerare che esso è indirettamente più competitivo. Il costo è funzione di numerosi elementi ed è dunque particolarmente difficile farsi un’idea precisa del costo reale del circuito finale : la superficie del silicio, il test…sono tanti i fattori che influenzano il costo finale del prodotto.