48
6 Conclusions and Future works
6.1 Conclusions
In this work a capillary gripper that exploits the different surface tensions of the picking and of the releasing liquid has been proposed. A simulation tool and an experimental layout have been developed. The theoretical and the experimental results have been successfully compared, considering the various approximations and the measurement errors. This capillary gripper showed high repeatability and reliability of the handling process. These proprieties, with the self centring effect of the liquid that makes the alignment between the object and the releasing drop perfectly correct, make the method to be advisable for an industrial application. An industrialization of the capillary gripper would lead to have a quicker and more precise handling process.
The behaviour of the capillary gripper has to be studied more deeply and other solutions have to be tested (e.g. using non-Newtonian fluids).
6.2 Improving capillary gripper
In order to obtain an industrial piece of equipment, the capillary gripper needs other studies. For the simulation tool of this work, the picking tip has been considered a plane, then other configurations have to be implemented. For example, it looks like quite simple to develop a simulation of the interaction between two spheres and to compare the results with the previous ones. A possible geometry to consider for this simulation is shown in Figure 1.
Moreover an investigation has to be done in order to test other couple of liquids and compare them with the couple oil-water. Actually, the process of the evaporation of the liquid has to be limited by an accurate choice of the solutions. The sought liquids must have an adequate surface tension difference but it is important to limit the evaporation if it is important to investigate upon the forces involved in the process.
Furthermore, the experimental layout have to be improved to get larger control of the system. Actually, high definition cameras and a further view of the contact zone will lead to more accurate measurements.
49
Figure 1 Geometry of the meniscus between two spheres (source [1])
Finally, it would be interesting to investigate the role of the damp that persists in the roughness of the items.
6.3 Thixotropic gripper
Looking for other microhandling systems to develop, some capillary grippers that use non-Newtonian fluids have been theorized. First of all, the behaviour of non-non-Newtonian fluids has been studied.
Figure 2 Rheologic behaviour of fluids (source [12])
The viscosity of the fluids is the angular coefficient of the curves reproduced in Figure 2. The viscosity of the shear thinning (or pseudoplastic) fluids decrease increasing the velocity gradient (shear strain rate). The shear thickening (or dilatant) fluids have the opposite behaviour: their viscosity increase increasing the velocity gradient. The
50 thixotropic fluids are some pseudoplastic fluids which viscosity decrease increasing the action time of the stress. The thixotropy is the property that allows some gels to turn into liquids.
Some thixotropic fluids (ketchup, paint for decorations) have been tested and some grippers have been imagined (indeed, some test grippers have been created).
The behaviour of the dilatant fluids (e.g. starch solutions) has been tested to apply their properties to a gripper, but, at the moment, no application in the area of microassembly was found.
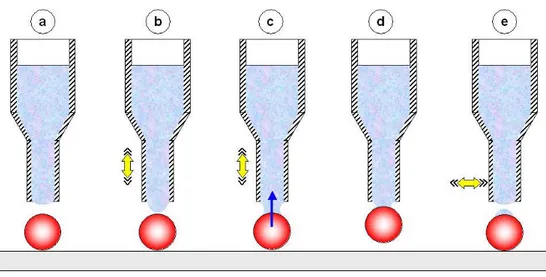
A gripper that makes use of a thixotropic fluid is the one whose handling principle is described by the Figure 3.
The idea is to use vertical vibration to decrease the viscosity of the fluid, so a drop flows down and touches the object. When the vibration is stopped, the capillary forces pick up the item. Another vibration, horizontal this time, still exploits the thixotropic property to realize the releasing task.
Figure 3 Handling principle of the gripper
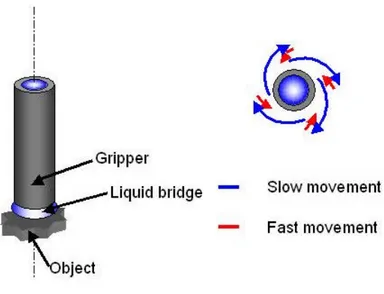
Another capillary gripper has been studied to realize the manipulation of micro-components (Figure 4). The idea is to handle items employing just one and a half degrees of freedom: one for the approaching movement and a half for the rotation. This gripper uses the capillary force for the grasping task and it rotates the object by means of a series of quick rotational accelerations that modify the liquid viscosity.
51
Figure 4 1 and ½ d.o.f. gripper
Some experiments have been done using a piezoelectric actuator but other configurations have to be tested to obtain valuable results.
![Figure 1 Geometry of the meniscus between two spheres (source [1])](https://thumb-eu.123doks.com/thumbv2/123dokorg/7336168.91371/2.892.359.539.103.428/figure-geometry-meniscus-spheres-source.webp)