Capitolo 5
Preparazione alla simulazione
5.1 – Introduzione al lavoro svolto
Un primo oggetto di questa tesi è lo studio di quel che accade nei pochi istanti corrispondenti allo scoccare della scintilla tra gli elettrodi della candela, allo scopo di costruire un modello di calcolo che permetta di riprodurre fedelmente tali condizioni. I risultati ottenuti dall’applicazione di tale modello costituiranno poi i dati di partenza per eseguire, tramite codici di calcolo CFD, delle simulazioni relative allo sviluppo della fase di combustione. Compito fondamentale dello studio CFD è, infatti, di fornire previsioni accurate riguardo ai fenomeni fluidodinamici che avvengono all’interno dei motori.
Prima di entrare nel dettaglio, è utile riportare qualche nozione generale sui passi da seguire per eseguire una simulazione CFD, a proposito del quale si è già largamente parlato nel cap.4. In seguito verrà descritta la modalità con la quale è stato impostato lo studio oggetto di questa trattazione.
5.2 – Simulazione CFD
Per eseguire una simulazione CFD è necessario organizzare il lavoro secondo quanto descritto nella flow chart di fig. 5.1.
Il lavoro ha avuto inizio con la definizione della geometria del motore e di tutti i suoi parametri operativi. Per quanto riguarda la geometria, essa è stata modellata mediante l’utilizzo del preprocessore CATIA (IBM) in ambiente UNIX. Occorre precisare che con modellazione della geometria si intende la definizione del dominio su cui verranno effettuate la meshatura e successivamente il calcolo. Nel caso in esame il dominio sarà costituito dalla regione fluida.
Postprocessore: OpenDX -UNIX- Solutore: KIVA 3Vr2 -Windows-Preprocessore: CATIA ( IBM ) -UNIX- Fig. 5.1 – Flow-chart
Nel preprocessore, mediante vari passaggi che saranno trattati nei prossimi paragrafi, viene generata la griglia utilizzata dal solutore per svolgere i calcoli. Come solutore viene impiegato il codice CFD KIVA3V, compilato in ambiente Windows.
Il passaggio dal preprocessore al solutore è la fase più delicata del lavoro e deve essere svolta nella maniera più accurata possibile; in tale passaggio vengono definite le condizioni al contorno e le condizioni iniziali ed è facile immaginare come un errore o un’errata definizione di tali condizioni porti ad invalidare tutto il lavoro a valle. Per le condizioni iniziali e al contorno si è fatto riferimento a valori ricavati da simulazioni svolte in precedenza al Dipartimento di Energetica. Eseguiti i calcoli, il file di risultati generato dal solutore (tape9) viene postprocessato mediante il programma di visualizzazione dati OpenDX,
5.3 – Geometria e caratteristiche del motore
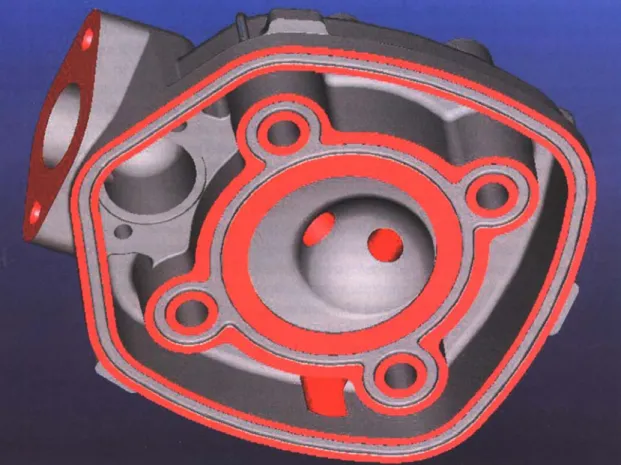
Lo studio è stato effettuato sul motore monocilindrico 2T a carica stratificata mostrato in fig. 5.2. In fig. 5.3 si osserva la forma particolare della testa a berretto di fantino. Sono inoltre visibili i fori dove vengono alloggiati candela di accensione ed iniettore.
Fig. 5.2 – Vista del motore
Le caratteristiche tecniche e le dimensioni geometriche del motore sono riportate in tab. 5.1.
Cilindrata 250 cm3
Alesaggio 72,5 mm
Corsa 60,5 mm
Rapporto di compressione 11,5
Travasi di immissione 1 condotto centrale
4 condotti laterali Volume della camera
di combustione 23,70 cm
3
Fasatura di apertura e chiusura delle luci laterali
Apertura: 53° p. PMI Chiusura: 53° d. PMI
Fasatura di apertura e chiusura della luce centrale
Apertura: 53° p. PMI Chiusura: 53° d. PMI
Fasatura di apertura e chiusura della luce di scarico
Apertura: 78° p. PMI Chiusura: 78° d. PMI
Sistema di raffreddamento Raffreddamento ad aria
Pressione di iniezione 100 bar
5.4 – Generazione della griglia di calcolo
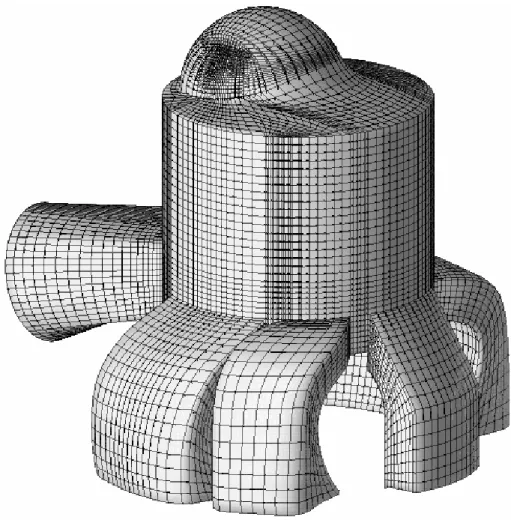
Come già accennato nel par. 5.2, mediante il software CATIA viene generata e preprocessata la griglia di calcolo che permetterà lo studio del motore. Caratteristica essenziale di questa è che sarà definita in un dominio rappresentante il volume di fluido contenuto all’interno del cilindro.
In fig. 5.4 viene riportato il mesh rappresentante il cilindro in esame. Nelle figg. 5.5 e 5.6 sono riportate alcune riproduzioni CAD in cui si notano la particolare geometria della camera di combustione, e la bowl emisferica scavata nel cielo del pistone, componenti essenziali per l’ottenimento di una buona stratificazione della carica.
Non è tuttavia scopo di questa trattazione soffermarsi troppo sulla riproduzione della geometria e sulla generazione della mesh; per questo vengono riportati in seguito soltanto brevi cenni sulle varie tipologie di mesh che si possono trovare nel campo delle simulazioni computazionali.
Fig. 5.5 – Visuale della testa a berretto di fantino.
Le nozioni che verranno di seguito riportate risulteranno utili per la comprensione di alcune scelte adottate che verranno esposte nel seguito della trattazione. Nel nostro caso infatti il codice di calcolo Kiva3V necessita della presenza di un mesh multiblocco di tipo strutturato, vincolando così, sin dall’impostazione del lavoro di costruzione del mesh, a seguire determinate regole, che non sussisterebbero se il mesh fosse non strutturato.
5.4.1 - Il mesh strutturato
La generazione della griglia è spesso indicata come il processo più importante e dispendioso, in termini di tempo, dell’ analisi CFD. La qualità della griglia è fondamentale nel determinare la qualità dell’analisi; questo senza considerare il solutore utilizzato.
Inoltre, quando usiamo un mesh ben congegnato, il solutore dovrà essere efficiente e “robusto”, al fine di ridurre il tempo di calcolo.
Il mesh strutturato prende il nome dal fatto che la griglia si presenta con un disegno costituito da elementi regolari, omogenei e ripetitivi. Questo tipo di griglia utilizza, nei problemi bidimensionali, l’elemento quadrilatero e, nei problemi tridimensionali, l’elemento esaedrico.
Fig.5.6 – Esempio di mesh strutturato.
Fig.5.7 - Esempio di Mesh non strutturato.
Siccome la forma degli elementi è fissata, la griglia deve essere adattata alla geometria in studio mediante operazioni di distorsione e allungamento (“stretching” and “twisting”) dei blocchi. Questo passaggio spesso è affidato al meshatore che, in automatico, definiti i blocchi in cui è suddivisa la geometria, applica appropriati algoritmi di calcolo (che sfruttano sofisticate equazioni ellittiche), ottimizzati al fine di conferire proprietà di ortogonalità e uniformità alla griglia (vedi fig. 5.6).
Le prime versioni di mesh strutturati erano composti da un solo blocco. Pertanto l’utilizzatore era obbligato ad approssimare la geometria, variando la distribuzione delle celle ed eventualmente escludendo alcuni elementi, anche rilevanti.
Successivamente sono state sviluppate le griglie strutturate multiblocco, le quali permettono l’utilizzo di diversi blocchi, connessi tra loro, al fine di costruire e riprodurre al meglio l’intero dominio. Nel corso degli anni anche i metodi di interconnessione dei blocchi hanno subito una forte evoluzione.
Tra questi i più usati dai programmi di meshatura automatici sono il point to point e il many
points to one point: i blocchi devono topologicamente e fisicamente essere attaccati ai
contorni.
Utilizzando il metodo point to point ci troviamo di fronte ad un dominio dove i blocchi sono topologicamente simili alla geometria, ma non ne hanno gli stessi contorni; utilizzando il metodo many points to one point i blocchi sono fisicamente simili ai contorni, ma hanno differenze topologiche anche rilevanti.
Le griglie multiblocco danno all’utente più libertà rispetto alle griglie monoblocco nella costruzione della mesh, ma presentano la limitazione del dover rispettare precise regole nella connessione dei blocchi e, di conseguenza, risultano difficili da costruire. Inoltre permettono un’accuratezza maggiore nella rappresentazione del dominio e una maggiore robustezza numerica.
Occorre citare anche un altro metodo utilizzato per la costruzione di griglie strutturate multiblocco, il quale tra l’altro permette di risolvere i problemi derivanti dalle connessioni dei vari blocchi: Il metodo Chimera detto anche Overset grid methods. Esso, permettendo ai vari blocchi della griglia di essere conformi ai contorni fisici del modello, consente maggiore libertà nell’interconnessione dei vari blocchi.
Le griglie strutturate presentano anche il vantaggio notevole, rispetto alle griglie non strutturate, di consentire un maggiore controllo della griglia stessa. L’utente può controllare i vertici e i lati dei blocchi interattivamente, disponendo di totale libertà nel posizionamento della griglia.
La griglie strutturate usano, come già detto precedentemente, elementi quadrilateri o esaedrici, che risultano molto efficienti nel riempimento dei blocchi ed offrono maggiore possibilità di deformazione e di adattabilità al dominio, senza che la soluzione ne sia influenzata. E’ opportuno osservare tuttavia che, nel generare una meshatura di questo tipo, una volta effettuata la suddivisione in blocchi, non è possibile apportare modifiche locali al mesh senza che queste si propaghino anche nel resto della griglia.
Infine il post processamento dei risultati di una griglia strutturata è tipicamente un compito semplice perché i piani logici, in cui il blocco e quindi la griglia sono suddivisi, sono un’eccellente riferimento per esaminare il campo del flusso e visualizzare i risultati.
In figura 5.8 è riportato un esempio di mesh strutturato.
Fig. 5.8 – Esempio di mesh strutturato
5.4.2 - Il mesh non strutturato
Le griglie non strutturate fanno uso di varie specie di elementi per riempire il dominio. Siccome la griglia non presenta un motivo regolare e ripetitivo (fig. 5.7), il mesh è denominato non strutturato.
Questo tipo di griglia solitamente usa elementi triangolari in problemi bidimensionali ed elementi tetraedrici in problemi tridimensionali; come nel caso delle griglie strutturate, gli elementi possono essere allungati e deformati, per meglio rappresentare il dominio
considerato. Questo metodo presenta il vantaggio di una più facile e rapida generazione in automatico.
Dato in ingresso un buon modello CAD, un buon meshatore è in grado, in pochi passaggi e con minimo impegno da parte dell’utilizzatore, di meshare la superficie, ad esempio mediante elementi triangolari, se si tratta di un problema 2D, o mediante elementi tetraedrici, se trattasi di un problema 3D.
Gli algoritmi usati per creare mesh non strutturati tipicamente utilizzano due metodi:
- Advancing front; - Delaunay.
Il primo crea il mesh suddividendo inizialmente i contorni del modello e aggiungendo successivamente elementi a partire proprio dalle celle confinanti con i bordi, fino a riempire l’intera figura. Il secondo metodo, meshando il contorno del modello, aggiunge punti internamente e li collega successivamente mediante elementi.
Il mesh è facilmente ottenibile, l’utilizzatore non si deve preoccupare della forma dei blocchi e delle loro connessioni. Il mesh non strutturato si presta bene ad essere utilizzato da un utente non esperto, poiché bastano pochi input per generare un mesh valido, spesso adatto ad uno studio di primo approccio. Inoltre permette una rapida generazione di mesh, anche dettagliati, in brevissimo tempo, prestandosi perfettamente a studi di tipo parametrico (nei quali è richiesta una variazione frequente della geometria). Tuttavia presenta il grande svantaggio di mal controllare il mesh lontano dai contorni della geometria. Infatti l’utente che utilizza un mesh non strutturato può facilmente controllare la suddivisione dei contorni, ma l’interno del mesh è lasciato, salvo particolari casi, all’algoritmo utilizzato e quindi è difficilmente controllabile. Inoltre gli elementi utilizzati hanno problemi ad essere sensibilmente deformati. Ne consegue che la griglia presenta un’ alto grado di anisotropia; tutto ciò rappresenta un inconveniente non trascurabile quando vogliamo rifinire il mesh localmente. In fig. 5.9 sono infatti visibili dei tipici difetti che si vengono di solito a creare in un mesh non strutturato. Un altro svantaggio è rappresentato dalla necessità di avere a disposizione un buon modello CAD di partenza, esente da difetti. Molti meshatori falliscono il mesh anche in presenza di piccoli errori; questo comporta la massima accuratezza nella costruzione del modello ed è spesso difficile utilizzare modelli costruiti esternamente al preprocessore; si tratta di una limitazione non trascurabile se si pensa che oggi capita spesso che il committente dell’analisi CFD sia un’azienda terza e quindi il modello geometrico sia spesso sviluppato da persone non interfacciate direttamente all’analista, al limite dislocate a parecchia distanza.
Fig. 5.9 – Tipici difetti presenti in un mesh non strutturato
In ultima istanza, ma non meno importante, si ricorda che i solutori che utilizzano un mesh non strutturato richiedono più memoria e maggiori tempi di esecuzione, a parità di geometria, rispetto a software che utilizzano mesh strutturati; questo perchè in un mesh strutturato ogni punto della griglia può essere identificato semplicemente mediante l’utilizzo di due indici i,j (caso 2D), con risparmio di variabili e di quantità di dati da immagazzinare, a differenza di quello che succede in un mesh non strutturato.
.
Fig. 5.10 – Esempio di mesh non strutturato
5.4.3 - Il mesh ibrido
Le meshature ibride sono state sviluppate per beneficiare degli aspetti positivi, che possono derivare dall’utilizzo congiunto di mesh di tipo strutturati e non. Non ci dilungheremo oltre, perchè gli aspetti positivi dei due metodi di meshatura sono stati già menzionati ampiamente. D'altronde preme sottolineare che lo svantaggio più grosso, nell’utilizzo di un mesh ibrido, consiste nella difficoltà e nell’esperienza richiesta all’utilizzatore, per portare a termine la procedura di generazione della griglia.
5.5 - Organizzazione del lavoro svolto
Come già accennato nel par. 5.1, un primo obiettivo di questa tesi è lo studio della fase di accensione per un motore ad accensione comandata. I risultati ottenuti costituiranno le basi per la creazione di un modello di calcolo, riguardante la fase di accensione, che andrà ad implementare il modello già presente all’interno del solutore.
Avendo a disposizione il mesh illustrato in fig. 5.4, che si ricorda essere di tipo strutturato, e interessando l’accensione soltanto una zona ridotta della camera di combustione, si è scelto di eseguire lo studio di questa fase su di una geometria ausiliaria caratterizzata da un elevato grado di infittimento e riferita soltanto alla zona circostante gli elettrodi della candela.
Si ricorda che, per il tipo di mesh in esame, una volta eseguita la suddivisione in blocchi non è più possibile apportare modifiche locali alla griglia senza coinvolgere anche zone adiacenti. Nel caso in esame, per come è strutturata la geometria, si sarebbe dovuto infittire, per effettuare uno studio dettagliato dell’accensione, tutto il mesh della camera di combustione con un aumento notevole dei tempi di calcolo e l’introduzione di un grado di precisione elevato anche in zone dove non richiesto.
Per dare un’idea dell’infittimento adottato, basti pensare che il modello complessivo è composto da circa 97000 celle mentre il modello ausiliario da circa 125000.
Una volta eseguita questa prima fase di studio, i risultati ottenuti, preventivamente verificati mediante confronto con dati di letteratura, sono stati utilizzati come valori in ingresso per lo studio della fase di combustione, relativa questa volta alla geometria dell’intero cilindro. Il lavoro è stato quindi suddiviso in due parti principali, la prima riguardante uno studio approfondito della fase di accensione e la seconda riguardante la simulazione dello sviluppo della fase di combustione (per le trattazioni si rimanda rispettivamente ai cap. 6 e 7).
5.6 – Caratteristiche di funzionamento del motore in esame
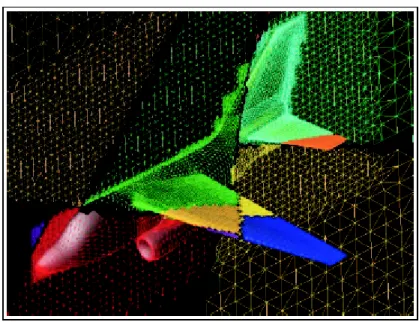
Per completezza vengono riportati anche alcuni risultati, relativi alla stratificazione della carica nel motore in esame, che hanno costituito gli elementi di base per lo studio delle fasi di accensione e combustione [19,20]. In fig. 5.11 viene riportata una sezione della camera di combustione, tramite il piano di simmetria del cilindro, all’atto dell’iniezione; si nota il posizionamento dell’iniettore e la direzione del cono di spray.
Fig. 5.11 – Posizionamento dell’iniettore ( non presente in figura ) e direzione del cono di spray.
Viene riportato in fig. 5.12 l’andamento del campo di moto all’interno del cilindro (per un regime di rotazione di 6000 giri/min) rilevato rispettivamente 40° e 80° prima del punto morto superiore. Questa immagine evidenzia il moto di tumble presente in camera di combustione alla fine della fase di compressione. Tale moto è favorevole al confinamento della carica nella zona della candela.
In fig. 5.13 è possibile notare l’evoluzione dello spray durante il moto dello stantuffo, riferita ad un regime di rotazione di 3000 giri al minuto e ad un’iniezione a carico ridotto (a carico ridotto viene iniettato circa 1/3 del combustibile rispetto al pieno carico). Nelle immagini si può osservare il metodo di confinamento della carica utilizzato: la forma particolare del cielo dello stantuffo indirizza la carica nella zona voluta.
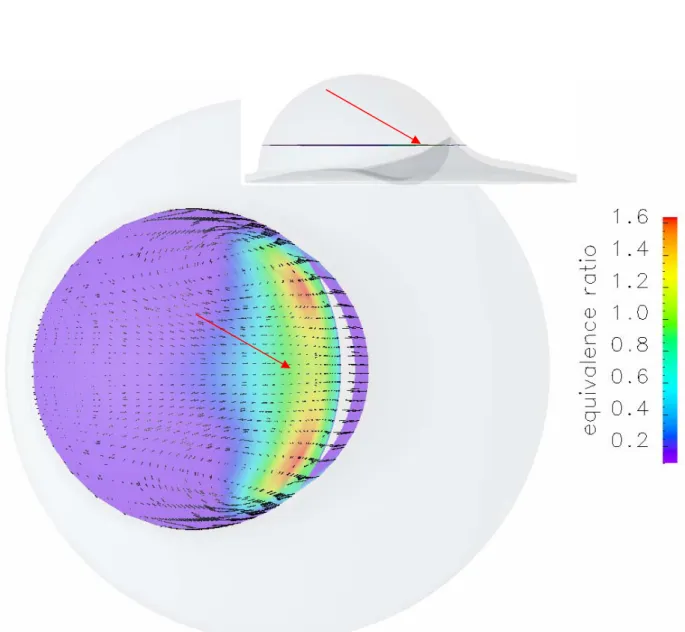
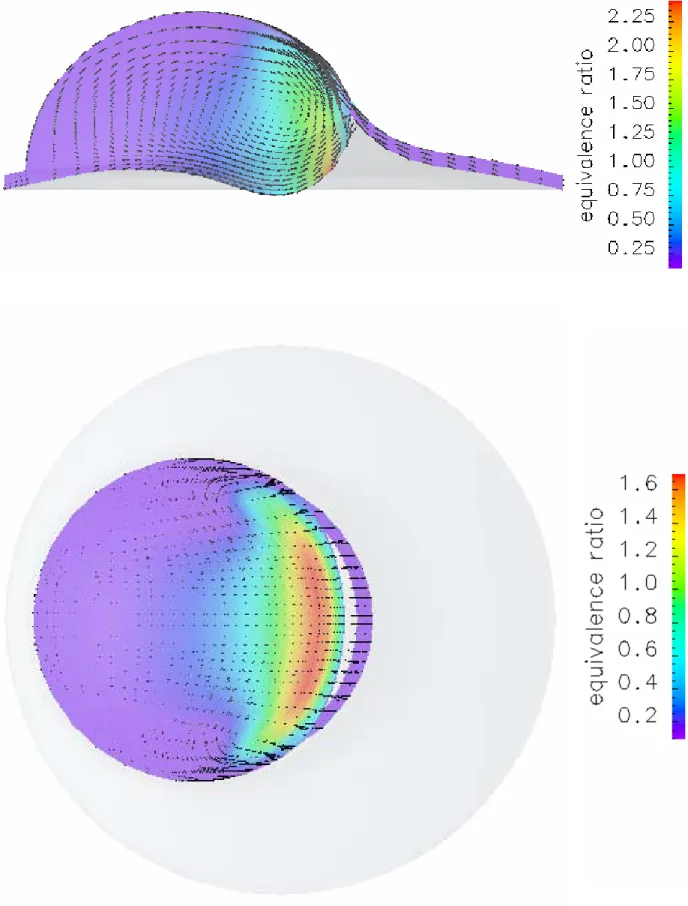
Vengono riportate in figg. 5.14, 5.15 e 5.16 anche immagini relative ai rapporti di equivalenza ottenuti all’interno del cilindro al momento dell’accensione. In fig. 5.14 ci si riferisce ad un regime di rotazione di 3000 giri/min e ad un iniezione a carico ridotto. In figg. 5.15 e 5.16 vengono riportate le condizioni relative a prove con un regime di rotazione di 6000 giri/min ed un’iniezione rispettivamente a carico ridotto e a pieno carico. Le fasature di iniezione usate sono state rispettivamente di 55°, 70° e 140° prima del PMS; per ottenere, infatti, una buona stratificazione anche ad alti regimi di rotazione, si ricorre ad un’iniezione anticipata.
Da queste immagini si può notare come la geometria del cielo dello stantuffo, unita al moto di tumble presente nella camera, consenta un confinamento della carica nella zona della candela; si può parlare, in questo caso, di sistema di stratificazione wall – and – air guided.
Fig. 5.12 – Rappresentazione del campo di moto, a 6000 giri/min, relativa a 80° prima delPMS ( fig. sopra ) e 40° prima del PMS ( fig. sotto ).
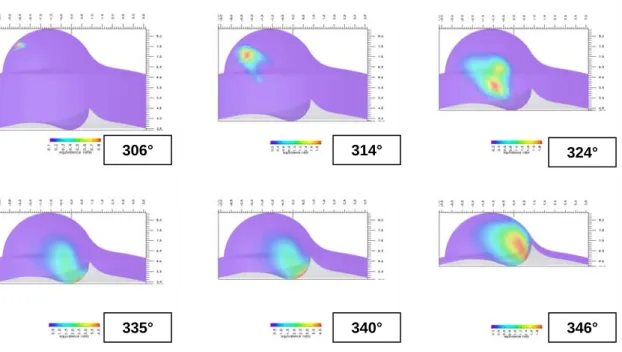
306° 314° 324°
335° 340° 346°
Fig. 5.13 - Evoluzione temporale del rapporto di equivalenza ad angoli di manovella successivi (prova a 3000 giri/min e carico ridotto).
Fig. 5.13 – Rapporti di equivalenza ottenuti su un piano passante per il piano di simmetria del cilindro ( fig. in alto ) e su un piano orizzontale passante all’incirca per la zona di
posizionamento della candela di accensione che viene indicata ( fig. in basso ). Risultati ottenuti a 14° prima del PMS, a 3000 giri/min e carico ridotto.
Fig. 5.14 – Rapporti di equivalenza ottenuti su un piano passante per il piano di simmetria del cilindro ( fig. in alto ) e su un piano orizzontale passante all’incirca per la zona di posizionamento della candela di accensione ( fig. in basso ).
Fig. 5.15 – Rapporti di equivalenza ottenuti su un piano passante per il piano di simmetria del cilindro ( fig. in alto ) e su un piano orizzontale passante all’incirca per la zona di posizionamento della candela di accensione ( fig. in basso ).