3 Sottosistema di trasmissione
In questo capitolo viene esposto il progetto del sistema, montato sulla scheda T (figura 2.14), dedicato a generare e condizionare il segnale da inviare al tweeter. Dopo una descrizione di un modello fisico equivalente dell’altoparlante utilizzato e il suo adattamento alle misure sperimentali eseguite sul tweeter, viene descritto in dettaglio il circuito di pilotaggio che può essere suddiviso idealmente in due blocchi, rappresentati dai componenti di potenza veri e propri e da un filtro di condizionamento del segnale.
3.1 Diaframmi vibranti e trasduttori elettromeccanici
Con il termine trasduttore elettromeccanico si intende un dispositivo in grado di trasformare un segnale elettrico in uno meccanico (caso degli altoparlanti), o un segnale meccanico in uno elettrico (caso dei microfoni).
Per utilizzare l’analogia elettromeccanica nell’ambito dei trasduttori elettroacustici bisogna utilizzare modelli a costanti distribuite (al posto di quelli a costanti concentrate utilizzabili nel caso di masse rigide e molle prive di massa). Attraverso l’utilizzo di analogie a costanti distribuite infatti, si può schematizzare la parte meccanica mobile delle sorgenti sonore e dei microfoni.
relative condizioni al contorno, ammettono come soluzione una combinazione lineare di modi di vibrazione (i modi sono una successione legata a due numeri interi, ognuno di essi è relativo a una autofunzione e a un autovalore, si veda [17] per maggiori dettagli).
Ad un modo di vibrazione corrisponde una configurazione della velocità di vibrazione degli elementi del diaframma, e a ogni modo di vibrazione è legata una frequenza (autofrequenza) di risonanza meccanica: per una sollecitazione a tale frequenza si ottiene il valore massimo della velocità di vibrazione (a parità di valore dell’ampiezza di sollecitazione), e quindi il valore minimo dell’impedenza meccanica del diaframma (relativo a quel particolare modo) si avrà a quella frequenza.11
Per un generico tipo di diaframma, un numero limitato di modi di vibrazione cade nella banda di interesse, e conseguentemente entro tale banda cade un numero limitato di autofrequenze: anzi, nei trasduttori elettroacustici si ricercano le condizioni affinché si abbia un solo modo fondamentale di vibrazione (in genere vengono costruiti appositamente perché avvenga ciò).
Pertanto se un solo modo (o modo fondamentale) è l’unico presente, il circuito
11Come velocità caratteristica del diaframma si può assumere la velocità media, oppure quella del
punto di applicazione della forza: infatti i punti di un diaframma, non essendo un corpo rigido, vibrano con velocità in generale diverse; in tal caso si assume un valore opportuno di impedenza meccanica, ad esempio facendo uso delle costanti equivalenti medie. Si veda [18] per un approfondimento su questo punto
equivalente di un diaframma vibrante di un trasduttore elettroacustico è costituito (figura 3.1) da un semplice circuito risonante serie, con impedenza equivalente meccanica (3.1), caratterizzata da un’inertanza M da una cedevolezza Cm e da una
resistenza equivalente Rm che schematizza i fenomeni di dissipazione, da una
frequenza di risonanza meccanica 0 1
2 m f C M π = e da un fattore di merito 0 2 m m M Q f R π = .
figura 3.1: bipolo equivalente del diaframma vibrante nell'ipotesi di azione del solo modo fondamentale
1 m m m Z R j M C ω ω = + − (3.1)
Il bipolo di figura 3.1 andrà poi chiuso sull’impedenza di radiazione Zr: anch’essa
dipende dalle caratteristiche della sorgente oltre che dal mezzo nel quale la sorgente è immersa e tiene conto del fatto che il diaframma vibrante irradia nel mezzo una potenza, sia attiva che reattiva, e il mezzo quindi può essere visto come un carico per il generatore meccanico costituito dal diaframma vibrante.
Quindi la parte meccanica di un trasduttore elettroacustico è schematizzata dal bipolo di figura 3.2 in serie all’impedenza di radiazione.
figura 3.2: bipolo equivalente alla serie di sorgente e impedenza di radiazione
tabella 3.1: impedenza di radiazione per vari tipi di sorgente acustica:
Tipo di sorgente Impedenza di radiazione
Sorgente di onde piane ideali Zr =ρ0c
Sfera pulsante (sorgente di onde sferiche ideali) r s s Z =R + jX 2 0 2 2 2 1 s r R c r π λ ρ π λ = + 0 2 2 2 1 s r X c r π λ ρ π λ = +
Tipo di sorgente Impedenza di radiazione
Dipolo acustico (approssima il comportamento di un altoparlante il cui diaframma vibra in aria libera)
r s s Z =R + jX 4 4 0 0 4 4 4 0 4 1 1 3 4 s R R c R c c ω ρ ω = + 2 2 0 2 0 0 4 4 0 4 2 1 3 4 s R c M R R c ω ρ ω + = +
La schematizzazione di tutto il trasduttore elettroacustico a cui ci si riferisce (comprensiva anche della parte elettrica) è costituita da un quadripolo avente un’entrata elettrica e un’uscita meccanica come riportato in figura 3.3.
figura 3.3: schematizzazione quadripolo elettroacustico con una porta elettrica e una meccanica
11 12
V =Z ⋅ +I Z ⋅U (3.2)
21 22
F =Z ⋅ +I Z ⋅U (3.3)
11
Z e Z sono le impedenze del sistema elettrico e meccanico in assenza di 22 accoppiamento elettromeccanico fra le due parti (si tratta infatti di un’impedenza elettrica pura e di un’impedenza meccanica pura), mentre Z e 12 Z rappresentano 21
la schematizzazione dell’azione del lato meccanico su quello elettrico e viceversa (figura 3.4).
11
Z eZ sono la somma di due termini (3.5) (3.4): uno relativo alle impedenze 22
interne del trasduttore propriamente detto (Z e e i, Zm i, ) e uno relativo all’impedenza del generatore di tensione (Ze g, ) e all’impedenza di carico su cui è chiusa la parte meccanica (Zm c, ).
figura 3.4: quadripolo con evidenziata la parte di accoppiamento
11 e e i, e g,
Z =Z =Z +Z (3.4)
22 m m i, m c,
Z =Z =Z +Z (3.5)
conservazione dell’energia per quadripoli passivi nei quali il fenomeno di accoppiamento elettromeccanico è esente da perdite dissipative, condizione in genere ben approssimata dai trasduttori realizzati in pratica).
* *
12 21
em me
Z =Z = −Z = −Z (3.6)
In definitiva l’altoparlante è descritto dal modello di figura 3.5, ovvero dalle equazioni (3.7) (3.8). , , 0=(Zm i+Zm c)⋅ +U Zem⋅I (3.7) * , , ( ) g e i e g em V = Z +Z ⋅ −I Z ⋅U (3.8)
Nel caso di un altoparlante a bobina mobile è valida la relazione (3.9) dove B 0
rappresenta l’induzione magnetica uniforme prodotta dal magnete permanente e l
è la lunghezza del conduttore avvolto sul magnete permanente. 0
em em
Z =R =B l (3.9)
meccanico su quello elettrico. * , , , , , ( ) em em e tot e i e g m i m c Z Z V Z Z Z I Z Z ⋅ = = + + + (3.10)
Per quanto riguarda gli altoparlanti a accoppiamento magnetico, abbiamo che la impedenza elettrica propria è ben rappresentata da Ze i, =Re i, + j Lω e i, (dove R e e i,
,
e i
L rappresentano rispettivamente la resistenza e l’induttanza dell’avvolgimento)
e l’impedenza di radiazione Zm c, è trascurabile nei confronti di Zm i, , ovvero
, , ,
m i m c m i
Z +Z ≅Z pertanto l’impedenza di ingresso dell’altoparlante è ben schematizzata da quella riportata in (3.11) (utilizzando anche la (3.9)).
(
)
( )
0 2 , , , , 1 al al e i e t e i e i m m B l V Z Z Z R j L I R j M C ω ω ω = = + = + + + − (3.11)L’impedenza Z può essere vista come il parallelo di una resistenza e t, R , una eq
capacità C e una induttanza eq L il cui valore è legato a eq R M m C dalle m
relazioni (3.12): il circuito equivalente visto dalla parte elettrica diviene così quello in figura 3.6 (si noti che per 1
m M C ω ω = che corrisponde a eq 1 eq L C ω ω = si
( )
2 0 1 eq m eq eq m eq eq m m B l R R M R C R R L C R = = = (3.12)figura 3.6: modello equivalente altoparlante a bobina mobile
3.2 Altoparlante e sua caratterizzazione in frequenza
L’altoparlante da utilizzare doveva avere come requisito principale quello dell’economicità: la scelta è caduta su un comune tweeter, facilmente reperibile sul mercato, con dichiarati i seguenti valori:
4 Ω o 8 Ω) dato che il sistema andrà installato su veicoli con disponibilità di tensione di alimentazione bassa, dell’ordine dei 12 V-24 V, e quindi un’impedenza più bassa permette di avere correnti più elevate a parità di tensione di alimentazione.
In laboratorio si è effettuata la misura del modulo dell’impedenza dell’altoparlante per poter avere dei valori dai quali ricavare i valori degli elementi costituenti il modello equivalente.
La misura è stata effettuata alimentando l’altoparlante con una sinusoide di frequenza e ampiezza nota: a un generatore di segnale è stato collegato in serie un amplificatore audio (cosa che ha consentito di avere una bassa impedenza di uscita in confronto ai 4 Ω dell’altoparlante, un elevata impedenza di ingresso rispetto ai 50 Ω del generatore di segnale e un guadagno regolabile) a sua volta in serie a un amperometro (figura 3.7) che misurava il valore efficace della corrente che lo attraversava (con una resistenza di shunt di 0,1 Ω): dal rapporto fra i fasori della corrente misurata dall’amperometro e della tensione che si misurava ai morsetti dell’altoparlante si è ricavato il modulo dell’impedenza alla frequenza della sinusoide di ingresso.
figura 3.7: sistema utilizzato per misurare l'impedenza del tweeter
La misura è stata ripetuta al variare della frequenza a partire da 8 kHz fino a 100 kHz (era importante conoscere il comportamento anche ad alta frequenza in quanto il segnale di pilotaggio ha delle componenti anche ad alta frequenza e nel progetto della rete di filtraggio bisognava analizzare anche il comportamento a frequenze fuori banda acustica, si veda il paragrafo 3.3) a passi di 100 Hz fino a 20 kHz, e poi a passi di 500 Hz.
figura 3.8: andamento del modulo dell'impedenza del tweeter in funzione della frequenza per le alte frequenze (a passi di 500 Hz)
figura 3.9: andamento del modulo dell'impedenza del tweeter in funzione della frequenza per le basse frequenze (a passi di 100 Hz)
Come tutti gli altoparlanti a bobina mobile, anche il tweeter in questione potrebbe essere danneggiato durante il suo utilizzo da possibili componenti in continua o, comunque, a frequenza troppo bassa rispetto a quelle che può riprodurre (ogni altoparlante a bobina mobile possiede una frequenza inferiore di taglio che indica la componete frequenziale più piccola che può riprodurre senza distorsioni lineari, ma possiede anche una frequenza, inferiore alla precedente, al di sotto della quale si danneggia irreversibilmente).
Per ovviare a questo problema si è inserito in serie al tweeter una capacità con il compito di filtrare le basse frequenze, il cui valore è stato scelto in modo che la rete formata dalla serie del tweeter e del condensatore avesse un comportamento passa alto con frequenza di taglio inferiore intorno ai 3 kHz (a tal proposito, dato che era noto solo il modulo dell’impedenza del tweeter, si è considerato il comportamento in bassa frequenza del tweeter come puramente resistivo, ipotesi in accordo con il modello e con l’impedenza intorno alla frequenza di 3 kHz). La misura è stata poi ripetuta con in serie al tweeter un condensatore elettrolitico del valore di 4,7 µF, ottenendo il risultato in figura 3.10, dove il comportamento oltre 25 kHz non è stato riportato perché ricalca quello misurato senza condensatore.
figura 3.10: andamento del modulo dell'impedenza (in verde) della serie formata dal condensatore elettrolitico da 4,7 µF e dal tweeter confrontato con il modulo dell’impedenza (in blu) dell’altoparlante
(scala lineare)
figura 3.11: andamento del modulo dell'impedenza (in verde) della serie formata dal condensatore elettrolitico da 4,7 µF e dal tweeter confrontato con il modulo dell’impedenza (in blu) dell’altoparlante
Si è poi effettuata, con la disposizione riportata in figura 3.12, la misura della funzione di trasferimento del quadripolo formato dall’altoparlante e dal microfono (a meno di un fattore moltiplicativo) per avere un’indicazione sulla risposta in frequenza, riportata in figura 3.13, del sistema altoparlante-microfono (il microfono è caratterizzato da una risposta in frequenza con frequenza di taglio superiore intorno ai 16 kHz) e per ricavare informazioni sulla frequenza di risonanza meccanica dell’altoparlante, utile per ottenere il valore numerico degli elementi circuitali costituenti il modello equivalente dell’altoparlante.
figura 3.12: disposizione strumenti per la misura della funzione di trasferimento del quadripolo altoparlante-microfono
figura 3.13: andamento del rapporto fra le tensioni misurate sul microfono (Vout) e sull’altoparlante (Vin) in funzione della frequenza (scala lineare)
figura 3.14: andamento del rapporto fra le tensioni misurate sul microfono (Vout) e sull’altoparlante (Vin) in funzione della frequenza (scala logaritmica)
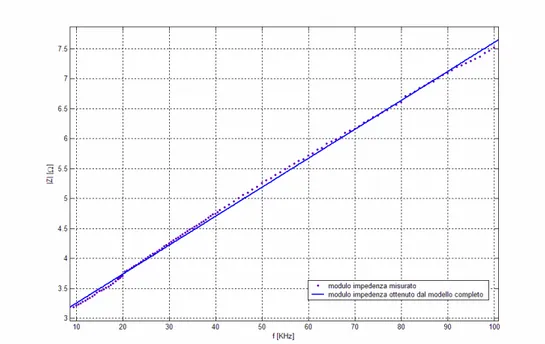
I dati ricavati dalle misure sono stati poi utilizzati per assegnare un valore numerico agli elementi circuitali costituenti il modello dell’altoparlante (figura 3.6), modello dal quale si ricava l’impedenza riportata in (3.13).
(
, ,)
2 2 , 2 , 2 2 2 1 1 1 1 1 1 eq al al e i e i eq eq eq eq eq eq eq R e i e i eq eq eq R eq R R V Z R j L I R j R C L R R L R j L R R L L ω ω ω ω ω ω ω ω ω ω ω ω ω = = + + = + − − = + + − + − + − (3.13)Ipotizzando la Re,i linearmente dipendente dalla frequenza (modello che descrive
abbastanza bene il comportamento resistivo di una bobina avvolta su un nucleo ferromagnetico), il valore dell’impedenza elettrica trasferita ricavato dall’adattamento dei parametri del modello sui dati sperimentali (fitting effettuato con il software MATLAB, in particolare con il cftool) è risultato di valore molto minore rispetto all’impedenza elettrica propria (si sono ottenuti valori dell’impedenze elettriche trasferite inferiori a 0,1 Ω all’interno dell’intervallo frequenziale di interesse); anche l’induttanza elettrica propria risulta trascurabile rispetto alla componente resistiva propria.
sperimentali (rispettivamente semplificato e completo) e i dati misurati.
0 *
al R
Z =R +K f (3.14)
figura 3.16: confronto fra valori misurati e modello completo
Inoltre, in base ai risultati della funzione di trasferimento misurata, si è scelto la frequenza di funzionamento f0 = 15,5 kHz; rimane aperta la possibilità di
utilizzare il sistema a frequenze superiori previo l’utilizzo di un microfono caratterizzato da una frequenza di taglio superiore e adeguata ai valori spettrali che si vogliono raggiungere. Infatti, dal modello equivalente che si è ottenuto, si osserva che Zm,i presenta un minimo nei dintorni di 23,5kHz, valore quindi che
dell’altoparlante sommata all’impedenza interna del generatore (3.15) , , ( e i e g) V I Z Z ≈ + (3.15)
Quindi il valore della velocità di vibrazione U risulta proporzionale al prodotto della corrente I per l’impedenza trasferita Zem diviso Zm,i (3.16)
, Z em m i Z I U ≈ ⋅ (3.16)
Per poter ricavare con precisione maggiore il valore dell’impedenza trasferita, sarebbe necessario effettuare misure di fase dell’impedenza totale e, soprattutto, misurare il valore dell’impedenza totale vista dal lato elettrico (sia in modulo che in fase) con il diaframma vibrante rispettivamente bloccato e con il diaframma libero nel vuoto (situazioni che corrispondono a un impedenza di radiazione infinita e nulla).
3.3 Il segnale di pilotaggio e architettura del blocco di potenza
Una volta stabilita la frequenza di utilizzo dell’altoparlante, scelta condizionata anche dalla risposta in frequenza del microfono, si è passati alla scelta del tipo di circuito di potenza per realizzare lo stadio di pilotaggio dell’altoparlante.Considerando che il sistema in questione lavora a una frequenza fissa, non è necessario l’utilizzo di un amplificatore “classico” (in classe A, B o C) con un basso livello di distorsioni lineari, sia di ampiezza che di fase: non è necessario neppure che il sistema sia lineare, ma può essere utilizzato anche un sistema non lineare.
Prevedendo infatti un opportuno filtro passa-basso da interporre fra stadio di potenza e altoparlante, è sufficiente avere un’onda quadra in uscita dal circuito di potenza (figura 3.17): in questo modo all’altoparlante arriva un segnale sinusoidale con ampiezza e frequenza voluta (rappresentata dalla componente a frequenza fondamentale del segnale onda quadra).
figura 3.17: struttura della parte di potenza del circuito di pilotaggio
L’utilizzo di un segnale di pilotaggio siffatto permette di realizzare lo stadio di potenza in modo semplificato rispetto all’utilizzo di un amplificatore audio (sia rispetto a una realizzazione a componenti discreti che con integrati tipo TDA) e inoltre presenta un’efficienza che teoricamente può arrivare anche al 100% (è un montaggio molto simile a quello utilizzato negli amplificatori audio in classe D). Questa scelta, oltre a permettere una semplificazione dello stadio di potenza, semplifica anche l’implementazione del generatore di segnale a monte dello stadio di potenza, in quanto è sufficiente utilizzare un’onda quadra, alla frequenza
sull’armonica a frequenza fondamentale.
Tale approccio è analogo del caso degli inverter di potenza più economici: la forma d’onda che si ottiene è detta a “sinusoide modificata” (in letteratura esistono riferimenti a tal proposito): qui si dà un breve richiamo su come viene ottenuto questo risultato.
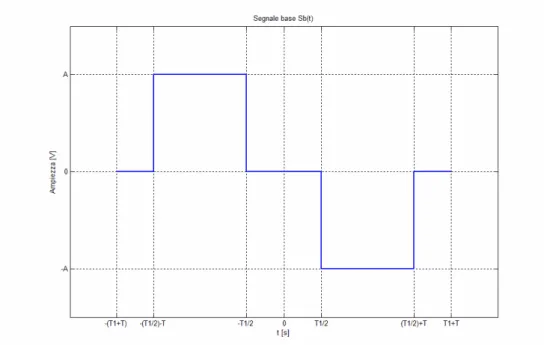
figura 3.18: segnale base che replicato nel tempo dà il segnale di pilotaggio
Il segnale di pilotaggio s(t) (equazione (3.18)) è ottenuto come replica sul periodo
T0 del segnale base, sb(t), rappresentato in figura 3.18 e riportato nell’equazione
(3.17) 1 1 2 2 ( ) b T T T T t t s t A rect A rect T T + + + − = ⋅ − ⋅ (3.17)
(
0)
( ) n b n s t s t n T =+∞ =−∞ =∑
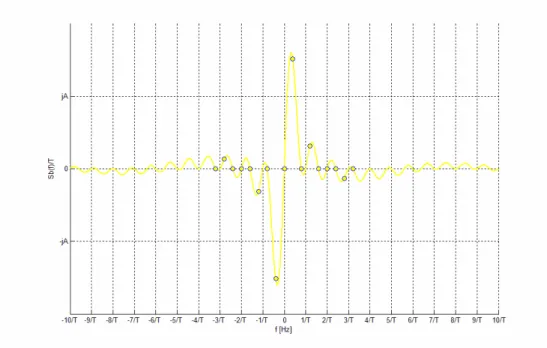
− ⋅ (3.18)Nell’espansione di s(t) in serie di Fourier (3.19), grazie al fatto che s(t) è ottenuto come replica nel tempo sul periodo T0 = 2(T1+T) del segnale base sb(t), si può
utilizzare la nota relazione di Poisson (3.20) per ricavare l’ennesimo coefficiente della serie di Fourier di s(t), Sn, riportato nell’equazione (3.22) e nella figura 3.19
(nella (3.20) con Sb(f) si è indicata la trasformata continua di Fourier del segnale
aperiodico sb(t))12. 0 2 ( ) j nt n T n n s t S e π =+∞ =−∞ =
∑
⋅ (3.19)( )
0 0 1 n n b f T S S f T = = ⋅ (3.20)( )
( )
0 sinc 2 sin 2 4 b T S f =AT fT j π f (3.21)( )
0 0 0 0 1 sinc 2 sin 2 4 n n b f T AT nT n S S f j T = T T π = ⋅ = (3.22)Addensare la maggior potenza possibile sulla prima armonica S1 significa far sì
figura 3.19: andamento trasformata segnale base con indicato i coefficienti del segnale periodico
( )
12 2 p n n n S R T S =+∞ =−∞ =∑
(3.23) 2 2 0 2 n n n A T S T =+∞ =−∞ =∑
(3.24)( )
2 0 0 4 sinc p T T R T T T = (3.25)Riportando in un grafico Rp(t) in funzione di T/T0, con la limitazione ovvia
0 0 2 T T < < , si ottiene la figura 3.20.
Il valore ottimale di T/T0 è 0,368 (si può ottenere risolvendo la (3.26)): per tale
( )
0 p R T T ∂ = ∂ (3.26)figura 3.20: andamento del rapporto fra la potenza associata alla prima armonica e la potenza totale del segnale in funzione del rapporto T/T0
Per l’implementazione del circuito di pilotaggio si è scelto un montaggio a ponte H (figura 3.22), che permette anche di ottenere un’onda quadra a valor medio nullo (figura 3.23) senza la necessità di un’alimentazione simmetrica rispetto al comune.
figura 3.22: montaggio a ponte H che permette di ottenere la forma d'onda in figura 3.23
Per la realizzazione degli switch si sono utilizzate due coppie di MOS complementari (figura 3.24), il cui dimensionamento è riportato poco sotto, in modo da poter controllare il ponte con solo i due segnali Vin_1 e Vin_2.
Con l’andamento delle tensioni Vin_1 e Vin_2 riportato nella figura 3.25 si ottiene, con un carico resistivo, l’andamento riportato in figura 3.26.
conduzione: questa situazione, che costituisce un fatto positivo e cercato nel caso di una porta digitale (dove si cerca la velocità di commutazione e dove le RDSon dei dispositivi non sono così basse come nel caso dei MOS di potenza), può determinare un superamento dei vincoli di funzionamento del dispositivo, sia in termini di corrente massima istantanea che di potenza dissipabile.
La nota condizione che determina la conduzione di entrambi i dispositivi n e p si è riportata per comodità nell’equazione (3.27).
n tn DD tp in DD tp tn in DD tp in tn se V V V
V V V conduce MOS tipo p
per V V V V conducono entrambi
V V conduce MOS tipo
≤ − → ≤ − ≤ ≤ − ≥ (3.27) n DD tp tn in DD tp DD tp in tn in tn se V V V
V V V conduce MOS tipo p
V V V V sono entrambi interdetti
V V conduce MOS tipo
− ≤ →
≤ −
− ≤ ≤
≥
(3.28)
Avendo la VDD determinata dalla potenza che si vuole sul carico, si può lavorare
in due direzioni:
1. scegliere MOS con Vtp e Vtn in accordo alla (3.28); questo però comporta
in generale una carica indotta nel canale più piccola a parità di VGS. Inoltre,
a causa del fatto che esiste un intervallo temporale nel quale nessuno dei due MOS è in conduzione, si possono avere problemi con carichi induttivi: in tal caso è necessario prevedere diodi di circolazione con il compito di mantenere la corrente negli induttori quando entrambi gli interruttori sono
chiusi (altrimenti le giunzioni p-n fra drain e substrato per il tipo p e fra substrato e source per il tipo n entrerebbero in conduzione a causa del carico induttivo).
2. dimensionare il tutto in modo che, durante l’intervallo in cui sono entrambi in conduzione, non vengano superate le caratteristiche massime di funzionamento dei dispositivi con i quali è realizzato il ponte.
figura 3.26: andamento della tensione Vout sul carico di figura 3.24 quando i due invertitori sono comandati dalle tensioni Vin_1 e Vin_2 riportate in figura 3.25
Passando alla scelta del tipo specifico di MOSFET adatto al sistema in questione, si sono dovuti considerare anche i seguenti requisiti:
• corrente massima erogabile maggiore o uguale a quella richiesta in base alla potenza voluta sul carico;
• bassa RDSon (il termine di confronto in questo caso è l’impedenza nominale dell’altoparlante) per avere alta efficienza e minor potenza dissipata dal componente;
• possibilità di interfacciamento diretto con l’uscita in tecnologia CMOS del microcontrollore (per evitare di utilizzare un ulteriore circuito di pilotaggio, comunemente detto driver, interposto fra la porte di I/O del microcontrollore e il gate del MOSFET di potenza).
L’ultimo punto comporta condizioni sulla tensione di comando VGS necessaria al
MOSFET per lavorare nella zona voluta, che deve essere compatibile con i livelli di tensione forniti dalle porte di I/O del microcontrollore, riportati in tabella 3.2, e condizioni sull’assorbimento di corrente da parte del MOSFET durante la commutazione, compatibile con le capacità di erogazione di corrente delle porte di I/O del microcontrollore.
Per quanto riguarda le condizioni sulla corrente, si deve tener presente che un MOSFET possiede una capacità di gate che deve essere caricata/scaricata dalla porta di I/O del microcontrollore durante la commutazione da valore alto a valore basso e viceversa: la corrente erogata dall’uscita del microcontrollore (realizzato in tecnologia CMOS) deve allora essere di valore sufficiente a caricare le componenti capacitive a valle in un tempo trascurabile rispetto al periodo fondamentale, in maniera che il circuito di pilotaggio sia sollecitato correttamente. Riferendoci alla figura 3.27 e ai due termini tPHL e tPLH, che indicano
rispettivamente il tempo che impiega l’uscita per passare rispettivamente da livello alto a livello basso (da VDD a VDD/2) e da livello basso a livello alto (da 0 a VDD/2), devono essere soddisfatte le relazioni (3.29).
figura 3.27: generico stadio di uscita a CMOS con carico capacitivo (a) e andamento delle tensioni di ingresso e di uscita con indicati i tempi di salita e di discesa (b)
PHL PLH t T t T << << (3.29)
L’espressione generica dei tempi di salita e discesa è riportata13 nelle (3.30) e (3.31) dove con C si è indicata la capacità di gate del MOSFET dello stadio di potenza (che rappresenta la capacità di carico per la porta di I/O del microcontrollore), mentre le altre grandezze si riferiscono ai MOSFET rispettivamente di tipo p e di tipo n che danno corpo allo stadio di uscita di una porta di I/O del microcontrollore.
(
)
1ln 3 4 ( ) 2 tn DD tn PHL n DD tn DD tn DD V V V C t K V V V V V − = + − − (3.30)(
)
1ln 3 4 ( ) 2 tp DD tp PLH p DD tp DD tp DD V V V C t K V V V V V − + = + + + (3.31)Nelle specifiche (datasheet) dell’ATmega16 [21] non sono indicate tutte le grandezze presenti nelle (3.30) e (3.31) (in particolare manca l’informazione relativa alle costanti Kn e Kp e a Vtp e Vtn).
Tuttavia nelle caratteristiche statiche contenute nel riferimento [21] sono indicate (si sono riportate in tabella 3.2 per comodità) le coppie di valori VOL e IOL
(rispettivamente tensione sull’uscita e corrente assorbita dall’uscita in presenza di 0 logico sull’uscita) per VDD = 5 V e VDD = 3 V, e la coppia di valori VOH e IOH
(rispettivamente tensione sull’uscita e corrente assorbita dall’uscita in presenza di 1 logico sull’uscita) sempre per VDD = 5 V e VDD = 3 V.
tabella 3.2: caratteristiche statiche delle porte di I/O dell'ATmega16 (nel caso peggiore)
1. VDD = 5 V IOL = 20 mA VOLMax = 0,7 V
2. VDD = 3 V IOL = 10 mA VOLMax = 0,5 V
3. VDD = 5 V IOH = -20 mA VOHMin = 4 V
4. VDD = 3 V IOH = -10 mA VOHMin = 2,2 V
quindi il tempo tPLH (maggiore o uguale del tempo tPHL in quanto dovuto al pull-up
realizzato con MOS di tipo p).
(
)
( )
(
2)
2 D GS T DS DS I =K V −V V − V (3.32) 2 1, 5 V mA 3, 3 V tp p V K ≈ − ≈ (3.33) 62 PLH t ≈ ⋅C (3.34)La relazione che lega il tempo di discesa e il carico capacitivo per l’ATmega è riportata nella (3.34). Con una frequenza del periodo principale di T0 = 15 kHz e
un duty-cycle sul semiperiodo del 73 % si ottiene T ≈ 25 µs (intervallo temporale in cui il MOSFET è in conduzione). Affinché venga rispettata l’ipotesi sulla forma della tensione in ingresso al MOSFET si considera sufficiente un rapporto di 1 a 10 fra il tempo di salita tPLH e l’intervallo T: pertanto la capacità deve
rispettare la relazione riportata nella (3.35).
2, 5 40 nF
10
PLH T
t ≤ = µs→ ≤C (3.35)
In base ai requisiti da soddisfare sopra illustrati e, tenendo in considerazione l’ulteriore vincolo del basso costo, la scelta è caduta sull’integrato IRF7343 prodotto dalla International Rectifier, che contiene in un unico package SO-8 un MOSFET di tipo n e un MOSFET di tipo p con caratteristiche elettriche e termiche adatte all’utilizzo che se ne deve fare, le cui specifiche tecniche sono riportate in dettaglio in [22].
Vtp = -1 V e una RDSon, di 0,15 Ω (valori ottenuti per VGS = 4,5 V e per correnti
dell’ordine di qualche Ampere, che corrispondono alle condizioni di utilizzo a regime una volta esaurito il transitorio). La capacità di ingresso vale meno di 1 nF (circa 700 pF) per entrambi e quindi rientra ampiamente nel limite previsto dalla (3.35), infatti con tali valori si ottiene un tempo di salita tPLH ≈ 40 ns.
Per verificare che i limiti di funzionamento sulla corrente siano rispettati, bisogna considerare che per Vtn < VDD – Vtp per Vtn < Vin < VDD – Vtp i MOS sono entrambi
in conduzione. Esiste un limite sia di corrente massima impulsiva (38 A per il tipo
n e 27 A per il tipo p) che di potenza dissipabile dal componente.
Le condizioni di funzionamento qui sono VDD = 5 V con carico di 4 Ω, quindi la
corrente che scorre, una volta esauriti i transitori dovuti alla commutazione, è minore di 1,25 A.
Per quanto riguarda i transitori, osservando quello che succede su un tipo p (situazione peggiorativa perché la corrente che attraversa prima il tipo p poi il tipo
n è la stessa), si hanno in un periodo base di ripetizione (T0) due picchi di corrente nei quali i due MOS dal solito lato del ponte sono entrambi in conduzione.
Considerando le caratteristiche elettriche della porta di I/O del microcontrollore e la capacità di ingresso del MOS di potenza, si ha che il tempo di commutazione
lineare fra Vtn = 1 V a VDD – Vtp = 4 V (in realtà nella zona dove le RDSon sono più
basse ci sta meno tempo rispetto a questo caso) si ottiene una I < 15 A.
La potenza media dissipata in un tipo p in ogni treno di impulsi (4T0) è quindi data
dalla somma di quella dissipata esaurita la salita e di quella nei transitori (3.36).
(
)
( )
(
)
(
)
( )
(
)
2 2 2 2 1, 25 4 15 8 4 8 1, 25 4 15 8 455 mW 4 DSon s D s DSon s R T t P T t R T t T ⋅ + ⋅ ≤ ≈ + ⋅ + ⋅ = (3.36)Considerando poi le specifiche sulla ZthJA del MOS in questione (curva che mostra la massima impedenza termica effettiva tra giunzione e ambiente durante i transitori in funzione del duty-cycle e della durata dell’impulso) durante i transitori e il tempo Tc di intervallo fra l’invio di un treno e il successivo, si
ottiene una temperatura di giunzione Tj <1,5 °C+TA. Considerando invece la potenza di picco dissipata nei transitori (circa 40 W) e dovuta agli 8 picchi raggruppati insieme (situazione peggiorativa rispetto al reale) si ottiene Tj <14°C+TA.
Per verificare le argomentazioni sopraesposte, si è simulato con PSPICE il montaggio a ponte H con l’integrato IRF7343 pilotato da un invertitore CMOS (74 AC e 74 HC) con caratteristiche elettriche simili a quelle della porta del microcontrollore.
Nella figura 3.28 sono riportati gli andamenti delle tensioni di ingresso e sul carico, nella figura 3.29 sono riportati gli andamenti delle correnti nel MOS p e nel MOS n di un lato del ponte e nella figura 3.30 sono evidenziati su una scala
diversa i picchi di corrente sempre sullo stesso lato del ponte.
figura 3.29: andamento della corrente nei MOSFET di un lato del ponte, rispettivamente M1 in rosso e M2 in verde (si notano i picchi di corrente durante le commutazioni dovuti alla cross-conduzione)
figura 3.30: dettaglio dei picchi di corrente che si hanno durante le commutazioni di figura 3.29, rispettivamente M1 in rosso e M2 in verde
3.4 Filtro di accoppiamento fra MOSFET di potenza e
altoparlante
La forma d’onda generata dal ponte H ha necessità di essere filtrata prima dell’invio all’altoparlante a causa del contenuto di armoniche a frequenza maggiore della fondamentale15. Infatti il tweeter riproduce una gamma frequenziale fra 3 e 21 kHz, e potrebbe essere danneggiato da armoniche a alta frequenza; inoltre è necessario evitare possibili armoniche di corrente a alta frequenza nel MOSFET (il dimensionamento è stato fatto per un carico nominale di 4 Ω, e il tweeter è stato testato fino a 100 kHz). E’ necessario poi, che il mezzo di trasmissione (aria) sia sollecitato da una forma d’onda il più possibile addensata attorno alla frequenza fondamentale per evitare che si abbiano ritardi diversi per due componenti frequenziali diverse, peggiorando le prestazioni del sistema di ricezione.
A causa dell’elevata corrente che transita sul carico sono da scartare soluzioni basate su filtri attivi, che richiederebbero componenti troppo costosi per il livello di semplicità e economicità che ci si è prefissi. Pertanto ci si è orientati su un filtro a componenti passivi.
taglio (–3 dB) di 20 kHz.
Un filtro del secondo ordine (con una attenuazione quindi di 40 dB/decade) si è rivelato sufficiente anche in considerazione della forma d’onda in uscita dallo stadio di potenza che possiede una piccola frazione di potenza sulle armoniche diverse dalla fondamentale, come risulta dalla FFT eseguita sul segnale di figura 3.31 e il cui modulo è riportato nella figura 3.32 e in dettaglio per le basse frequenze in figura 3.33.
Per ottenere un comportamento bilanciato sui due semiponti si è scelto di realizzare un filtro simmetrico rispetto al carico (riportato in figura 3.34), anche per avere un’attenuazione di modo comune simmetrica, altrimenti il modo comune da una parte non trova l’induttanza in serie all’impedenza di isolamento.
figura 3.34: filtro LC bilanciato
Si è scelto di usare l’approssimazione di Butterworth (per cui da ftaglio = 20 kHz
deriva che il fattore di risonanza Q vale 0,707) in virtù della sua risposta piatta in banda passante, di una bassa sovraelongazione nella risposta al gradino, e una risposta transitoria di durata breve rispetto al periodo del segnale (nella figura 3.35 e nella figura 3.36 è riportato l’andamento della risposta al gradino per il filtro LC con ftaglio = 20 kHz al variare di Q e per alcuni valori di Q, mentre nella
figura 3.37 è riportata la risposta del filtro al segnale di pilotaggio per alcuni valori di Q).
Il segnale che viene applicato al carico costituito dal tweeter deve approssimare al meglio una sinusoide che vale 0 per t < 0 e per t > 4T0, pertanto è necessario che il
filtro non aumenti la durata del treno di 4 sinusoidi, e non ne modifichi la forma d’onda rispetto quella di una sinusoide per 0 < t < 4T0.
figura 3.35: andamento della risposta al gradino del il filtro LC con ftaglio = 20 kHz al variare del fattore
figura 3.37: risposta del filtro LC con ftaglio = 20 kHz al segnale di pilotaggio per alcuni valori del fattore
di risonanza Q
Considerando che in un sistema del secondo ordine il fattore di risonanza Q e il valore massimo del tempo di assestamento al 5%, Ta(5%), sono legati dalla nota
relazione16 (3.37), con un Q = 0,7 si ottiene un tempo di assestamento inferiore a 45 µs. (5%) 1 ln( ) 0.05 a taglio taglio Q Q T f f π ≤ ⋅ ≈ (3.37)
Il valore nominale dei componenti nel caso di circuito realizzato come in figura
3.34 è C = 1,41 µF17 e L = 22,52 µH, con i quali si ottiene ftaglio = 20 kHz, Q = 0,707, la risposta in frequenza riportata in figura 3.38, la risposta al gradino in
figura 3.39 e la risposta all’impulso di figura 3.40 dalla quale si verifica che i modi propri del sistema sono a regime dopo circa 30-40 µs.
figura 3.38: diagramma di Bode (in alto il modulo in basso la fase) della risposta in frequenza del filtro di figura 3.34 con C = 1,4 µF e L = 22,52 µH (nel caso teorico, ovvero nel caso di filtro realizzato con
figura 3.39: risposta a una sollecitazione a gradino del filtro di figura 3.34 con C = 1,4 µF e L = 22,52 µH (nel caso teorico, ovvero nel caso di filtro realizzato con componenti ideali)
figura 3.40: risposta a una sollecitazione impulsiva del filtro di figura 3.34 con C = 1,4 µF e L = 22,52 µH (nel caso teorico, ovvero nel caso di filtro realizzato con componenti ideali)
l’andamento nel tempo dell’uscita del filtro quando gli viene applicato il segnale di pilotaggio rappresentato in figura 3.31: ne risulta che il segnale ricalca abbastanza bene una sinusoide troncata su quattro periodi, come si può vedere nella figura 3.41. Gli effetti del filtraggio sono evidenti in figura 3.42 dove è riportato un confronto fra il segnale prima e dopo il filtraggio, in figura 3.43 è riportato la FFT del segnale filtrato e in figura 3.44 un confronto fra la FFT del segnale prima e dopo il filtraggio.
figura 3.41: risultato del filtraggio del segnale di figura 3.31 con il filtro di figura 3.34 (nel caso teorico, ovvero nel caso di filtro realizzato con componenti ideali)
figura 3.42: confronto fra il segnale prima e dopo il filtro LC (nel caso teorico, ovvero nel caso di filtro realizzato con componenti ideali)
figura 3.43: FFT del segnale filtrato con il filtro LC (nel caso teorico, ovvero nel caso di filtro realizzato con componenti ideali)
figura 3.44: confronto fra le FFT del segnale prima e dopo il filtraggio passa basso (nel caso teorico, ovvero nel caso di filtro realizzato con componenti ideali)
Per realizzare il filtro nella pratica si sono dovuti scegliere componenti facilmente reperibili sul mercato. Per le induttanze è da tenere presente che devono essere attraversate da una corrente di circa 1,5 A e che devono presentare una resistenza a bassa frequenza trascurabile rispetto a quella del carico: si è scelto pertanto un’induttanza Panasonic serie ELC di valore 22 µH con una corrente di saturazione magnetica superiore a 1,8 A, una resistenza parassita di 66 mΩ e una tolleranza del 10% rispetto al valore nominale. Per la capacità si è scelto un
capacità e delle induttanze, si ottengono per la ftaglio e il Q gli intervalli di
variazione (non indipendenti l’uno dall’altro) riportati nella (3.39). 19, 6 kHz 0,738 T f Q = = (3.38) 0, 67 0,81 17, 9 kHz T 21,9 kHz Q f ≤ ≤ ≤ ≤ (3.39)
Nella figura 3.45 è riportato l’andamento del segnale in uscita dal filtro al variare delle tolleranze sugli elementi reattivi nei casi limite riportati nella (3.39): ne risulta un comportamento soddisfacente al variare delle tolleranze.
figura 3.45: andamento dell'uscita dal filtro nei casi di tolleranze per le quali si ottengono i casi limite di Q e di fT (si e massimizzato o minimizzato Q o fT e poi con quel valore di tolleranze si è calcolato l’fT
figura 3.46: schema completo del filtro passa-basso con evidenziate le capacità di by-pass per l'alta frequenza
Si sono poi inserite due capacità di valore pari a 1/10 della capacita C per eliminare le correnti di modo comune a alta frequenza sull’altoparlante, dovute al comportamento non ideale degli induttori, secondo la configurazione di figura 3.46.
3.5 Simulazione numerica della parte analogica
In questo paragrafo si è riportata la simulazione numerica del comportamento elettrico del sottosistema di trasmissione, realizzate con Orcad Pspice. Per quanto riguarda i MOSFET del ponte H si sono utilizzati i modelli di simulazione forniti dal costruttore, la porta di I/O del microcontrollore si è modellata sia con una
del tweeter in continua) in serie a un bipolo ottenuto connettendo, come in figura 3.47, un quadripolo avente l’uscita costituita da un generatore di corrente ideale controllato dalla tensione di ingresso del quadripolo stesso, ovvero Iout = G(f)Vin;
scegliendo come G(f) = 1/KR (KR, definito nella (3.14), rappresenta il legame fra
impedenza e frequenza per il tweeter). Nella figura 3.48 è riportato l’andamento nel tempo della Vin_1 e della Vin_2 (onde quadre generate dalla parte digitale), mentre nella figura 3.49 è riportato l’andamento della tensione e della corrente sul carico.