Capitolo 1 - La Propulsione Elettrica
1.1 Introduzione
La propulsione elettrica muove i primi passi all’inizio del novecento per merito degli studi indipendenti dell’americano Robert H. Goddard e del russo Konstantin Tsiolkovsky. Lo sviluppo più grande avviene dopo i conflitti mondiali nei centri di ricerca delle due superpotenze, durante la guerra fredda; ma è solo dopo la caduta dell’Unione Sovietica che le conoscenze acquisite in questo campo escono dalla riservatezza dei laboratori per approdare in campo commerciale, soprattutto grazie all’utilizzo di sistemi satellitari ad alta potenza.
I grandi vantaggi che hanno reso competitivo questo tipo di motori rispetto ad altri che sfruttano energia nucleare o chimica sono la semplicità di realizzazione rispetto ai primi e soprattutto l’elevata efficienza nell’utilizzo del propellente in confronto ai secondi; il risparmio di propellente legato all’utilizzo di questi motori consente infatti un incremento del carico pagante ed una conseguente riduzione dei costi della missione. Per trasformare in energia cinetica di un propellente l’energia elettrica a disposizione, fornita da opportuni apparati di generazione e conversione, tali motori possono sfruttare diverse tecnologie, come si vedrà nei prossimi paragrafi.
1.2 Tipologie di propulsori elettrici
Nella famiglia dei propulsori elettrici sono compresi tutti quei dispositivi che creano spinta accelerando un gas, tramite il suo riscaldamento a mezzo di resistenze o archi elettrici, oppure mediante forze elettriche o elettromagnetiche.
Una possibile classificazione dei propulsori elettrici può essere effettuata in base al processo accelerativo per ottenere la spinta [1, 2]:
• Propulsione elettrotermica: un propellente contenuto in un ambiente ad alta pressione viene riscaldato elettricamente e poi accelerato per mezzo di un
• Propulsione elettrostatica: il propellente, un gas ionizzato, viene accelerato mediante l’applicazione diretta di forze elettrostatiche;
• Propulsione elettromagnetica: il propellente, un fluido ionizzato ma globalmente neutro (plasma), viene accelerato dalle interazioni fra correnti elettriche che lo percorrono e campi magnetici sia interni (autoindotti) che esterni (applicati);
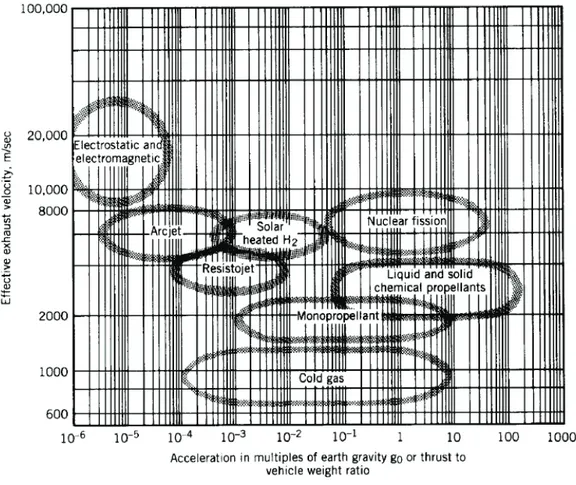
I propulsori elettrici sono caratterizzati da un rapporto spinta/peso estremamente basso, e da velocità efficaci di uscita (e di conseguenza impulso specifico) molto elevate. Non possono quindi essere usati per gli stadi di lanciatori, ma possono invece essere usati su satelliti già in orbita, per correggere le perturbazioni orbitali, o per trasferimenti orbitali (tipicamente da orbita terrestre bassa a orbita geostazionaria equatoriale), oppure su sonde interplanetarie. Si può notare nel grafico successivo (fig 1.1) l’enorme differenza di spinta rispetto ai propulsori di tipo chimico.
Figura 1.1 - Confronto tra le prestazioni delle tecnologie propulsive
Questa caratteristica dei propulsori elettrici (alto impulso specifico / bassa spinta) è dovuta alla netta separazione tra propulsore e sistema di generazione di potenza. Mentre, infatti, in un propulsore chimico l’energia si genera all’interno del motore
tramite la reazione per poi tradursi in energia cinetica del flusso accelerato, nel caso elettrico c’è bisogno di sottosistemi separati di generazione e conversione dell’energia, solitamente accompagnati da un’aggiunta ponderale considerevole di massa e tipicamente caratterizzati da potenze disponibili limitate (3÷4 Watt per kg di massa del satellite).
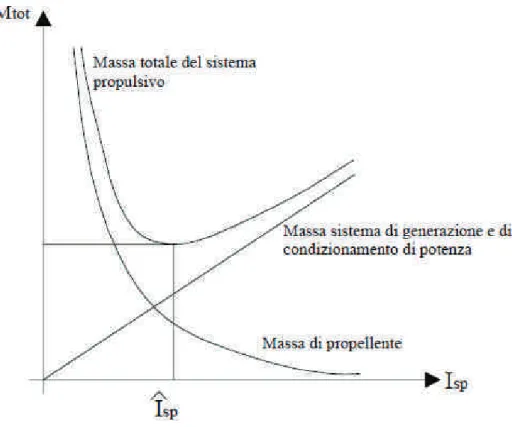
La massa del sottosistema di generazione dipende quasi linearmente dalla potenza necessaria, mentre la dipendenza tra la massa di propellente e l’impulso specifico ottenibile risulta di tipo iperbolico. Si cerca quindi di determinare un bilanciamento ottimo tra massa del combustibile necessario e massa dei sottosistemi di generazione di potenza, in modo da evitare di discostarsi dal valore ottimale dell’impulso specifico così da evitare un aumento della massa totale del satellite dovuta a maggior carburante imbarcato (impulso specifico minore) o ad una maggiore rilevanza ponderale dei sottosistemi di potenza (impulso specifico maggiore). Una schematizzazione della situazione descritta è rappresentata nella figura seguente (fig. 1.2)
1.2.1 Propulsori elettrotermici
I propulsori elettrotermici generano spinta cedendo energia di tipo elettrico ad un fluido di lavoro per poi farlo espandere in un ugello, ottenendo così l’energia cinetica necessaria per la spinta; in questa categoria di motori possiamo trovare tre principali classi di motori, differenziabili in base al meccanismo di riscaldamento del propellente:
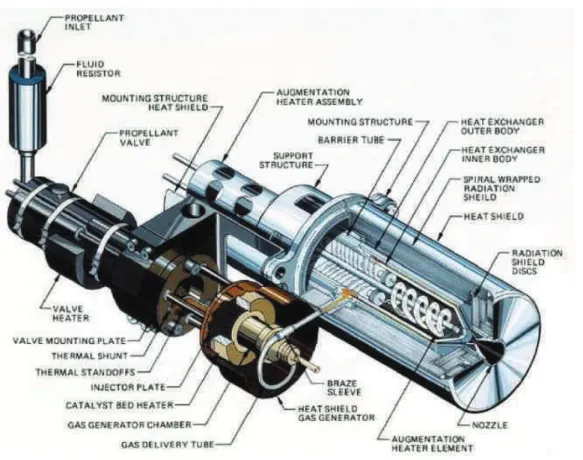
• resistogetto: il calore è trasferito al propellente per effetto Joule da una resistenza immersa in esso o per contatto con le pareti (fig 1.3);
• arcogetto: il calore è trasferito al propellente mediante un arco voltaico fatto scoccare all’interno dello stesso (fig 1.4);
• sistemi a riscaldamento induttivi e radiativi: gli atomi del propellente vengono eccitati mediante radiazioni ad alta frequenza.
A causa del processo accelerativo, le prestazioni di questi propulsori possono essere desunte facilmente da considerazioni energetiche. Infatti adottando un modello unidimensionale, notiamo che un gas completamente espanso in un ugello potrà raggiungere una velocità massima di scarico pari a:
c p
e c T
v < 2 (1.1)
dove c è il calore specifico del fluido di lavoro e p T la temperatura in camera di c combustione.
Come conseguenza della formula appena citata è immediato che gli unici due modi per aumentare la velocità di scarico sono l’utilizzo di un fluido di lavoro con massa molecolare più bassa possibile (cp = f
(
1 M)
, con M massa molecolare) oppure l’adozione di soluzioni tecnologiche per poter massimizzare la temperatura operativa della camera di combustione.In base a quanto detto l’idrogeno sembrerebbe il miglior fluido di lavoro possibile, ma all’atto pratico le complicazioni nell’immagazzinamento lo rendono sfavorito rispetto ad altri più facilmente stoccabili come l’idrazina o l’ammoniaca.
Il valore dell’impulso specifico nei propulsori elettrotermici può oscillare tra i 300 ed i 1000 secondi.
I motori legati a questa tipologia sono limitati dal processo accelerativo gasdinamico, che implica inevitabilmente la presenza di perdite per attrito; per questo motivo negli ultimi anni la ricerca si è focalizzata soprattutto sugli altri due tipi di propulsione.
Figura 1.3 - Sezione di un resistogetto ad idrazina
1.2.2 Propulsori elettrostatici
I propulsori elettrostatici hanno prestazioni migliori rispetto a quelli appena visti: le limitazioni di velocità di scarico e di tempo di vita riscontrate nella propulsione elettrotermica possono essere infatti aggirate accelerando il gas con una forza esterna [1, 2].
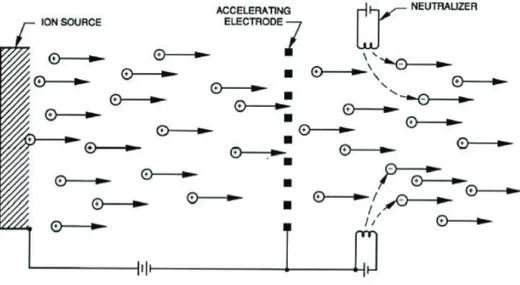
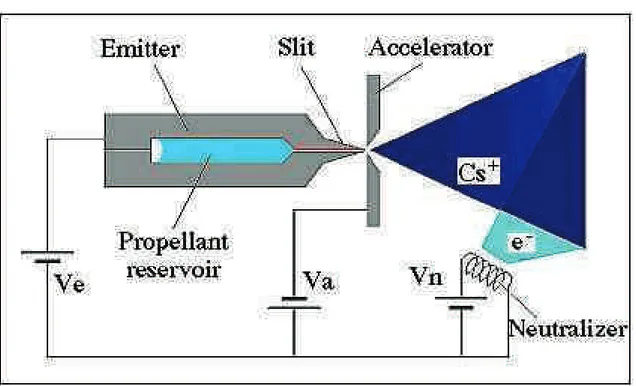
Il sistema più semplice, a livello concettuale, per accelerare il fluido di lavoro è quello del motore a ioni, nel quale un flusso di ioni viene prima accelerato da un campo elettrico e successivamente neutralizzato tramite un flusso di elettroni. Il principio di funzionamento di tale motore è visibile in fig. 1.5: un fascio di ioni atomici non collisionali, liberati da una sorgente, è accelerato da un campo elettrostatico stabilito fra la sorgente e la griglia acceleratrice. A valle di quest’ultima si trova un neutralizzatore il quale cede gli elettroni in precedenza tolti al propellente neutralizzandolo, in modo da evitare che gli ioni possano tornare indietro verso il propulsore, annullando la spinta.
Figura 1.5 - Schema del funzionamento di un motore a ioni
La velocità di scarico di tale motore è determinata dalla differenza di potenziale attraversata al momento della neutralizzazione e dal rapporto carica-massa della specie ionica sfruttata: i e M qV v = 2 (1.2)
Da un calcolo di prima approssimazione, basato sui valori tipici utilizzati in questo tipo di propulsori, si trovano delle velocità di scarico estremamente elevate (superiori a
5
10 m/s). In realtà, a causa della penalizzazione di massa del sistema di potenza questi sistemi tendono ad ottimizzare il loro rendimento di spinta a velocità di scarico troppo elevate per le principali missioni spaziali nelle vicinanze della terra e nelle missioni interplanetarie; un altro inconveniente di questa classe di propulsori è la bassa densità di spinta.
Per valori consueti dei parametri di riferimento la densità di spinta è dell’ordine di pochi newton per metro quadro. L’aspetto positivo di questi motori sta nel fatto che il rendimento di spinta è essenzialmente limitato soltanto dal costo energetico necessario alla ionizzazione il quale è una piccola frazione della loro energia cinetica di scarico. L’interesse per questa categoria di propulsori risiede soprattutto nella loro maturità, anche se in realtà solo una parte di essi ha interessi applicativi; volendo fare una classificazione dei propulsori elettrostatici, il discriminante più logico appare il sistema di produzione degli ioni:
• propulsori ad emissione ad effetto di campo (FEEP): piccole quantità di propellente liquido (solitamente cesio) sono portate, per capillarità, verso regioni dove un intenso campo elettrico strappa gli ioni alla superficie del liquido, secondo un meccanismo detto dei “coni di Taylor”, e quindi li accelera verso l’esterno; gli impulsi specifici ottenibili possono arrivare a 6000-8000s (fig 1.6); • propulsori a bombardamento elettronico: il gas, solitamente xeno o mercurio,
viene ionizzato tramite bombardamento da parte di elettroni emessi per effetto termoionico da catodi incandescenti; tali ioni sono poi accelerati da un campo di forza elettrostatico. L’impulso specifico ottenibile può arrivare a valori di 3000-4500s (fig 1.7);
• propulsori a ioni a radiofrequenza (RIT): la ionizzazione del gas, solitamente gas nobili come xeno o kripton, avviene in questo caso in una camera di scarica di materiale isolante come quarzo o allumina, attraverso l’eccitazione di elettroni liberi nel gas utilizzato come propellente, con onde elettromagnetiche a frequenze radio. La vita di questi motori è più lunga di quelli a bombardamento elettronico, perché nella camera di scarica non è necessario alcun catodo. Questi tipi di propulsori hanno un’efficienza che può arrivare a valori del 60%, con impulsi specifici ottenibili di 3000-4000s.
Figura 1.6 - Schema di un propulsore FEEP
Figura 1.7 - Schema di un propulsore a bombardamento elettronico
1.2.3 Propulsori elettromagnetici
I propulsori elettromagnetici si basano sull’interazione di una corrente elettrica, guidata attraverso un propellente conduttore, con un campo magnetico indotto o applicato dall’esterno, al fine di produrre una forza per accelerare la massa. Tali sistemi possono
generare velocità di scarico considerevolmente più elevate dei sistemi elettrotermici e densità di spinta maggiori dei propulsori elettrostatici, ma sono, sia dal punto di vista dei fenomeni fisici, sia dal punto di vista della modellizzazione analitica più complessi e meno trattabili.
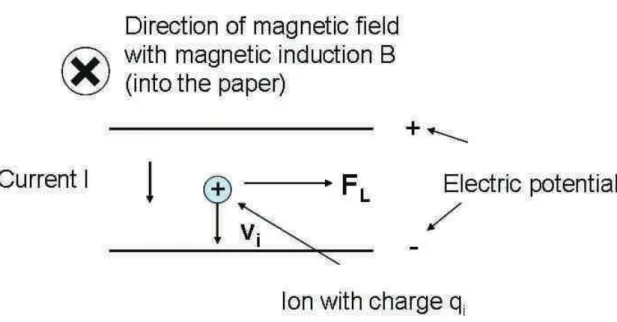
Lo schema di funzionamento dei propulsori elettromagnetici è rappresentato in fig. 1.7: un fluido di lavoro elettricamente conduttivo e ionizzato è soggetto ad un campo elettrico E e ad un campo magnetico B perpendicolari l’uno all’altro ed entrambi perpendicolari alla velocità u del fluido. La densità di corrente J controllata dal campo elettrico, interagisce con B generando una forza lungo la corrente F =J×B che accelera il fluido lungo il canale. Il processo può essere alternativamente rappresentato dal punto di vista particellare in termini di traiettoria media degli elettroni portatori di corrente, i quali seguendo il campo elettrico, sono ruotati a valle dal campo magnetico, trasmettendo la loro quantità di moto alle particelle pesanti della corrente per collisione e/o attraverso microscopici campi polarizzati. E’ importante notare che in entrambe le rappresentazioni il fluido di lavoro (plasma) sebbene altamente ionizzato, è microscopicamente neutro, quindi non ha vincoli dovuti a limitazioni della carica spaziale come accadeva nei propulsori elettrostatici.
Figura 1.8 - Schema di funzionamento dei propulsori elettromagnetici
Una classificazione di questi propulsori è sicuramente meno immediata: a differenza delle altre due famiglie viste in precedenza, i propulsori elettromagnetici presentano infatti una notevole quantità di versioni. I campi applicati e le correnti interne possono essere stazionari, pulsati o alternati sopra un intervallo di frequenze; il campo magnetico
varietà di propellenti, inoltre si può variare la geometria degli elettrodi, la forma del canale, i mezzi di iniezione, i sistemi di ionizzazione.
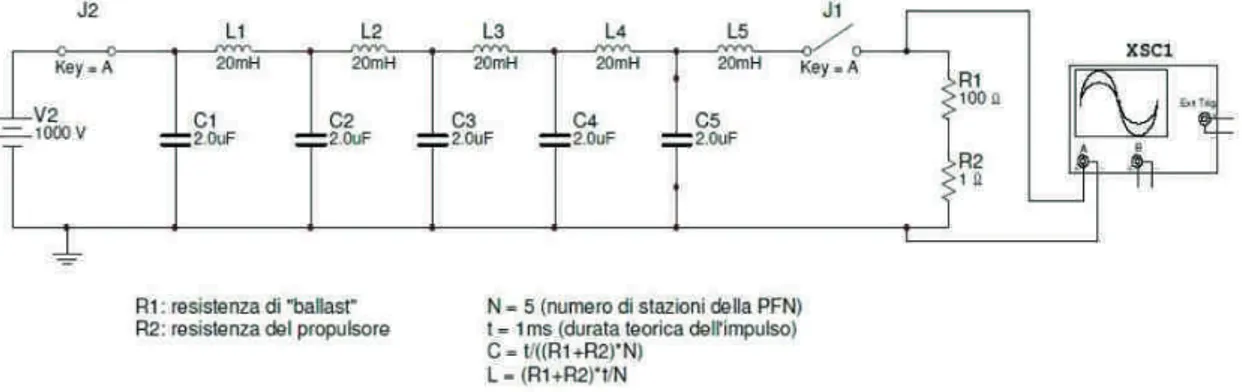
Per quanto riguarda il propulsore a regime pulsato (PPT), esso è un motore elettromagnetico particolare che utilizza una scarica pulsata con una certa frequenza per ionizzare una frazione di propellente solido. La velocità di ripetizione dell’impulso determina l’entità della spinta. E’ costituito da una linea PFN (Pulse Forming Network), cioè un apposito circuito costituito da condensatori ed iniettori la cui funzione é quella di generare un impulso rettangolare della durata di una frazione di secondo. In questo modo, per un certo intervallo di tempo “t”, avremo un determinato valore di corrente che scorre tra gli elettrodi del propulsore (fig 1.9). L’energia viene accumulata nei condensatori e rilasciata sul carico nel momento in cui viene chiuso l’interruttore.
Figura 1.9 - Schema della linea PFN
Ci sono due tipologie principali di propulsori elettromagnetici:
• Propulsori magnetoplasmadinamici (MPD): il propellente fluisce nello spazio tra gli elettrodi e viene ionizzato dalla scarica di corrente presente tra anodo e catodo; l’interazione tra la corrente che attraversa il fluido ed il campo magnetico autoindotto (o indotto da una bobina esterna) dalla corrente stessa produce una forza che accelera il fluido fornendo la spinta; questo meccanismo è rappresentato in fig. 1.10. Possono essere sia stazionari che pulsati. L’impulso specifico raggiunge i 2000-3500s;
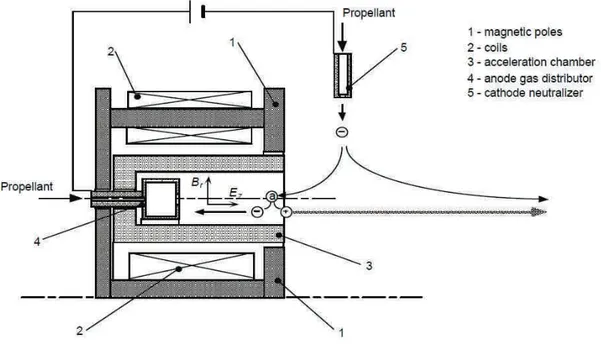
• Propulsori ad effetto Hall (HET): il propellente viene ionizzato da una forte corrente azimutale di elettroni generata dall’interazione tra il campo magnetico radiale e quello elettrico longitudinale. I valori dell’impulso specifico variano tra 1000-5000s. Vi sono due modelli principali denominati SPT (Stationary Plasma Thruster), caratterizzato da un canale di accelerazione esteso solitamente in
materiale ceramico visibile in fig. 1.11, e TAL (Thruster with Anode Layer), che invece presenta un canale di accelerazione corto metallico, mostrato in fig. 1.12.
Figura 1.10 - Schema di un motore MPD
Figura 1.12 - Schema di un motore ad effetto Hall TAL
1.3 Il funzionamento del motore ad effetto Hall
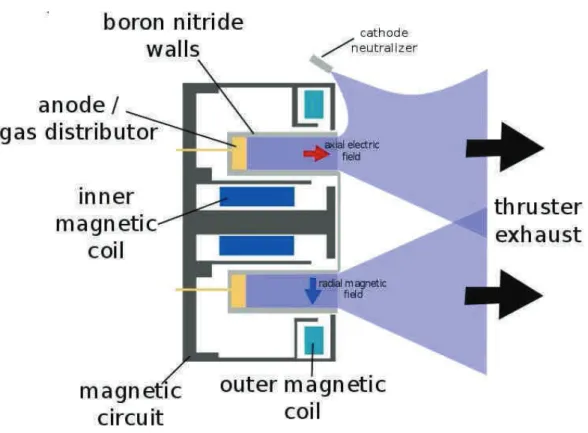
I propulsori ad effetto Hall basano il loro funzionamento sull’accelerazione di un fluido di lavoro grazie all’azione combinata di un campo magnetico e di un campo elettrico ad esso perpendicolare. Solitamente tali propulsori sono a simmetria cilindrica e i campi precedentemente descritti hanno direzione radiale (campo magnetico) ed assiale (campo elettrico).
Il campo magnetico è generato da un circuito magnetico opportuno creato da bobine in cui circola corrente elettrica in direzione azimutale e da opportuni elementi ferromagnetici. In alternativa è possibile utilizzare dei magneti permanenti per indirizzare meglio le linee di flusso magnetiche. Il campo elettrico invece è generato dalla differenza di potenziale applicata tra anodo (interno al motore) e catodo (esterno). Il fluido di lavoro più utilizzato è lo xeno poiché presenta le caratteristiche di elevata massa atomica (131 u.m.a.) e basso potenziale di prima ionizzazione, ma è possibile anche l’utilizzo di altri elementi come il kripton.
Il gas viene immesso in un canale, detto di accelerazione, nel quale si ha inizialmente la ionizzazione e successivamente l’accelerazione del plasma. In realtà il procedimento descritto sopra è riconducibile al propulsore ad effetto Hall chiamato SPT, in quanto nell’altra tipologia di motore (TAL) i due fenomeni avvengono in un’unica zona.
Tuttavia, per una corretta comprensione del funzionamento del motore da qui in avanti ci si riferirà alla configurazione SPT (fig. 1.13).
Figura 1.13 - Schema di funzionamento di un motore ad effetto Hall
La ionizzazione ha luogo grazie agli urti che avvengono tra il gas e gli elettroni, mentre l’accelerazione degli ioni è dovuta al potenziale elettrico generato tra catodo ed anodo (causato sia dalla tensione applicata sia dal potenziale creatosi nella zona magnetizzata a causa della maggior resistività in direzione assiale del plasma).
Il catodo emette elettroni che vengono spinti, grazie al campo elettrico applicato, verso l’anodo; quando raggiungono la zona in cui è presente il campo magnetico a causa di quest’ultimo gli elettroni iniziano a muoversi in direzione. All’interno del canale è però presente anche il gas neutro che, urtato dagli elettroni ad alta energia, si ionizza, e gli elettroni prodotti dalla ionizzazione seguono a loro volta la stessa sorte contribuendo così loro stessi alla ionizzazione del gas; alla fine gli elettroni raggiungeranno l’anodo chiudendo il circuito elettrico.
Diversa è invece la situazione degli ioni, che a causa dell’elevato valore del raggio di ciclotrone vengono accelerati verso l’esterno dal potenziale elettrico con traiettoria pressoché rettilinea.
Poiché gli ioni non risentono della presenza del campo magnetico il processo accelerativo è di tipo elettrostatico e quindi il valore della velocità di scarico è proporzionale alla tensione di scarica come per i normali motori a ioni e vale:
i d i e M V q Z v = 2 (1.3)
Nella (1.3) il valore del potenziale elettrostatico di scarica V è composto dal potenziale d esterno applicato tra il catodo e l’anodo; M rappresenta la massa degli ioni. i
I principali vantaggi di un propulsore ad effetto Hall si possono riassumere nei seguenti punti:
• efficacia del processo di ionizzazione del propellente, prodotto dalla stessa corrente di scarica senza nessuna necessità quindi di dover aggiungere un opportuno elemento ionizzante;
• assenza di limitazioni per effetto di carica dovuta al fatto che il fluido di lavoro è globalmente neutro;
• elevato rendimento di spinta (50-60%), che permette di raggiungere valori dell’impulso specifico considerati ottimali per molte missioni in cui è vantaggioso l’uso della propulsione elettrica;
Nei successivi capitoli, in base all’argomento trattato, vengono riportati alcuni fenomeni caratteristici che permetteranno una migliore comprensione del funzionamento dei propulsori ad effetto Hall.
1.4 Scopi ed obbiettivi della tesi
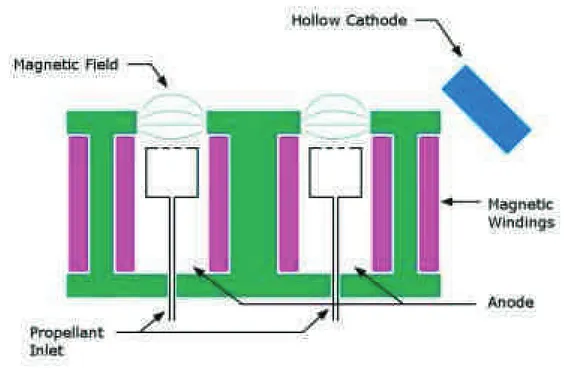
Il presente lavoro riguarda la progettazione di un propulsore ad effetto Hall a partire da alcuni componenti già presenti presso il laboratorio di Alta: tali componenti erano stati prodotti per essere utilizzati in un propulsore multicanale con tre canali coassiali, progettato al fine di ottenere un’elevata efficacia di spinta e ridurre le dimensioni d’ingombro attraverso l’utilizzo di una configurazione compatta [3], [4], [5], [6]. Uno schema del propulsore multicanale è visibile nella figura successiva (fig. 1.14).
E’ stato deciso di utilizzare il canale di accelerazione più esterno tra quelli del modello multicanale per realizzare un propulsore a se stante utilizzabile come propulsore principale per un satellite con potenza pari a 5 KW: la scelta di questo valore per la potenza di funzionamento è stata dettata dal grande interesse che questa classe di propulsori sta riscuotendo attualmente nell’ambito delle manovre orbitali arrivando a rappresentare una alternativa efficace alla propulsione chimica tradizionale.
Figura 1.14 - Rappresentazione del motore ad effetto Hall multicanale [5]
In questa relazione l’attenzione è stata posta principalmente sull’analisi del circuito magnetico del propulsore, in quanto rappresenta il componente principale per il suo funzionamento.
Data la natura dei componenti utilizzati, il motore ottenuto presenta una geometria non convenzionale e quindi il suo studio rappresenta un interessante esercizio per verificare la possibilità di ottenere buone prestazioni anche da propulsori che non seguono il classico schema utilizzato per la progettazione.
1.4.1 Suddivisione del lavoro
L’attività svolta si può suddividere nelle seguenti fasi:
• Scalatura del motore: ricavare le informazioni sul funzionamento del propulsore in base ai valori dei parametri disponibili e quelli di un motore di riferimento. • Disegno preliminare del circuito magnetico: in cui viene svolta la fase di
progettazione in modo da disporre di un modello di partenza per le successive analisi.
• Analisi magnetica: in cui si studia il comportamento magnetico del propulsore nella sua configurazione iniziale e si effettuano modifiche necessarie per arrivare ad una soluzione ottimale.
• Analisi termica preliminare: in cui si analizza la soluzione scelta dal punto di vista dei carichi termici.