78
Risultati
del
software
sviluppato
Capitolo 5
79
5.1 Introduzione
Il modello dinamico a parametri concentrati precedentemente descritto è stato implementato computazionalmente tramite la realizzazione di un codice MATLAB-SIMULINK. Oltre alle implementazioni descritte precedentemente per il modello si è voluto anche rendere il programma più facile e veloce da usare creando un software interno in più per fare i grafici dei risultati, in modo da poterlo richiamare direttamente se viene imposta qualche modifica ai valori ottenuti.
Inoltre si è pensato che fosse conveniente poter analizzare l’ingranamento al variare della coppia ad intervalli intermedi, come per esempio succede nella fase di decollo.
Nel presente capitolo vengono mostrati e discussi i risultati ottenuti.
Sono state analizzate numericamente diverse coppie di ruote a denti dritti o elicoidali con prove in accelerazione (ramp up) ed in decelerazione (ramp down) per il motivo che la non linearità dell’ingranamento fa sì che il comportamento dinamico possa essere diverso nei due casi.
Le analisi sono state condotte con variazioni a gradino della velocità e la decisione dell’ampiezza del gradino è a cura dell’utente; prendendo, ad esempio, in considerazione un intervallo di 100 rpm avremmo un andamento del tipo seguente:
Risultati del software sviluppato
80 Figura 5.1 – Intervalli di velocità nel ramp up e nel ramp down
Il codice è stato sviluppato in modo che dopo ogni salto di velocità il sistema la mantenga per un certo tempo costante, al fine di annullare eventuali effetti transitori legati alla discontinuità.
5.2 Ingranaggi analizzati
Nel presente lavoro sono stati analizzati in ramp up e in ramp down diversi ingranaggi effettuando l’analisi sia con il programma che considera la rigidezza costante, sia con quello che usa la formula di Gerber. Si riportano le tabelle contenenti le caratteristiche principali degli ingranaggi analizzati:
z80-80 Ruote cilindriche a denti dritti
Ruota 1 2 Numero denti 80 80 Diametro base [mm] 129.34313 129.34313
81
Diametro primitivo [mm] 140 140 Diametro interno [mm] 74 74 Spessore di fascia [mm] 11 11
Coppia nominale [Nm] 300
z43-42 Ruote cilindriche a denti dritti
Ruota 1 2 Numero denti 43 42 Diametro base [mm] 100.9 98.4 Diametro primitivo [mm] 112.82 106.6 Diametro interno [mm] 74 74 Spessore di fascia [mm] 15 15 Coppia nominale [Nm] 500
z42-43 Ruote cilindriche a denti dritti
Ruota 1 2 Numero denti 42 43 Diametro base [mm] 98.4 100.9 Diametro primitivo [mm] 106.6 112.82 Diametro interno [mm] 74 74 Spessore di fascia [mm] 15 15 Coppia nominale [Nm] 300
z42-43 Ruote cilindriche a denti dritti
Ruota 1 2 Numero denti 42 43 Diametro base [mm] 98.4 100.9 Diametro primitivo [mm] 106.6 112.82 Diametro interno [mm] 74 74 Spessore di fascia [mm] 15 15 Coppia nominale [Nm] 50
z42-43 Ruote cilindriche a denti dritti
Ruota 1 2 Numero denti 42 43 Diametro base [mm] 98.4 100.9 Diametro primitivo [mm] 106.6 112.82 Diametro interno [mm] 74 74 Spessore di fascia [mm] 15 15 Coppia nominale [Nm] 1
Risultati del software sviluppato
82 z118-23 Ruote cilindriche a denti elicoidali
Ruota 1 2 Numero denti 118 23 Diametro base [mm] 515.08 91.24 Diametro primitivo [mm] 528.64 103.04 Diametro interno [mm] 489.02 66.09 Angolo d’elica 30 30 Spessore di fascia [mm] 47 6 Coppia nominale [Nm] 302.9
z118-23 Ruote cilindriche a denti elicoidali
Ruota 1 2 Numero denti 118 23 Diametro base [mm] 515.08 91.24 Diametro primitivo [mm] 528.64 103.04 Diametro interno [mm] 489.02 66.09 Angolo d’elica 30 30 Spessore di fascia [mm] 47 6 Coppia nominale [Nm] 0
z118-21 Ruote cilindriche a denti elicoidali
Ruota 1 2 Numero denti 118 21 Diametro base [mm] 515.08 82.28 Diametro primitivo [mm] 528.64 94.08 Diametro interno [mm] 489.02 56.33 Angolo d’elica 30 30 Spessore di fascia [mm] 47 11 Coppia nominale [Nm] 570.3
z118-21 Ruote cilindriche a denti elicoidali
Ruota 1 2 Numero denti 118 21 Diametro base [mm] 515.08 82.28 Diametro primitivo [mm] 528.64 94.08 Diametro interno [mm] 489.02 56.33 Angolo d’elica 30 30 Spessore di fascia [mm] 47 11 Coppia nominale [Nm] 0
83 Saranno esposti soltanto i risultati di un tipo di ingranaggio, per il quale si possono evidenziare i vari aspetti riscontrabili con il modello sviluppato. Tutti gli altri sono reperibili in [6].
5.3 Fattori dinamici e carico sul dente
Da un punto di vista progettuale gli output più importanti sono i fattori dinamici. Di seguito si riportano i risultati per l’ingranaggio z42-43 delle varie analisi con le spiegazioni.
I risultati del DF e del DFmf per i casi ramp-up e ramp-down nel caso di
coppia nominale Tn=50Nm sono i seguenti:
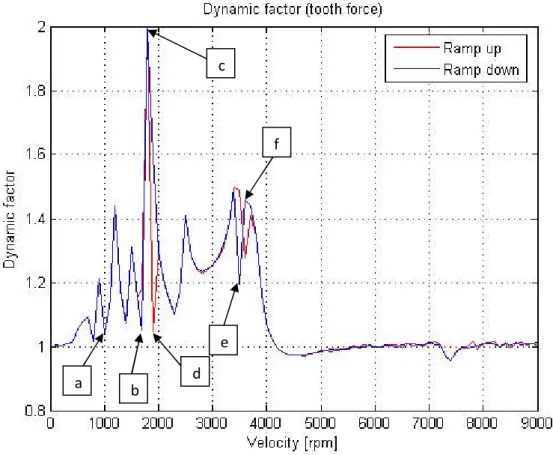
Figura 5.2 – Risultati del DF per l’ingranaggio z42-43 con coppia nominale di 50 Nm a d c e b f
Risultati del software sviluppato
84 Figura 5.3 – Risultati del DFmf per l’ingranaggio z42-43 con coppia nominale di 50
Nm
I valori dei fattori dinamici sono maggiori di uno per un ampio intervallo di velocità. Questo significa che lo sforzo sul dente, dovuto alle condizioni dinamiche, è più grande di quello riscontrabile con un’analisi statica.
Si possono riscontrare i picchi di risonanza disposti a frequenze doppie come previsto dalla teoria delle risonanze parametriche.
Purtroppo, il modello non fornisce il fattore KV fondamentale per la
progettazione a fatica degli ingranaggi; è, però, importante sottolineare che precedenti analisi teoriche e sperimentali [4] hanno mostrato che
85 Per cui possiamo utilizzare i valori del DF al posto di quelli di KV per
correggere i risultati statici.
Si può osservare che il DFmf è sempre maggiore del DF, quindi è
possibile, in piena sicurezza, l’impiego del fattore di mesh force come correttivo per le sollecitazioni a piede dente, anche se questo può, in certi casi, rivelarsi eccessivamente cautelativo.
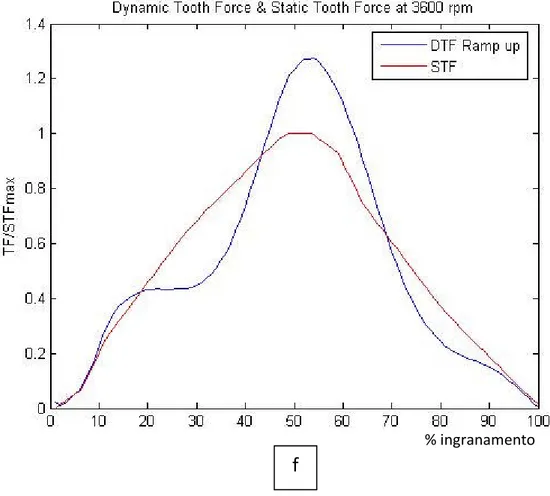
Per il carico sul dente è importante analizzare il comportamento nei casi in cui i fattori dinamici sono prossimi ai picchi di risonanza e dove sono diversi in ramp-up e in ramp-down. Si riportano i risultati dell’andamento del DTF normalizzato con lo STFMAX:
Risultati del software sviluppato
86 a
% ingranamento
87 b
% ingranamento
Risultati del software sviluppato
88 c
% ingranamento
89 d
% ingranamento
Risultati del software sviluppato
90 e
91 f
Figura 5.4 – Andamenti normalizzati del carico sul dente per l’ingranaggio z42-43 con coppia nominale di 50 Nm nei punti indicati in figura 5.2
% ingranamento
Risultati del software sviluppato
92 Si nota che alla velocità di 1000 rpm, per la quale si ha il DF vicino ad uno con lo stesso andamento sia in ramp-up che ramp-down, il DTF è simile allo STF con sovrapposte delle piccole oscillazioni e i grafici in ramp up e ramp down sono analoghi. A 1800 rpm siamo in corrispondenza di un picco di risonanza; si possono osservare le forti oscillazioni del DTF e che in alcuni istanti, per effetto dinamico, la forza scambiata tra le ruote si annulla, con la conseguente perdita di contatto. Alle velocità di 1700 rpm e 1900 rpm, prossimi al precedente picco di risonanza, si ha un DF con andamenti diversi in ramp-up e ramp-down ed in questi casi anche il DTF in ramp –up è diverso da quello in ramp-down; a 1700 rpm si ha il DTF con picchi molto più pronunciati per la condizione di ramp up, mentre per 1900 rpm si ha il contrario. Questo è dovuto al fatto che, a 1700 rpm in ramp up ci si avvicina al picco a 1800 rpm (accelerazione) e in ramp down ci si allontana (decelerazione), mentre a 1900 rpm la situazione è rovesciata.
Alle velocità di 3500 rpm e 3600 rpm siamo in presenza del secondo picco di risonanza, e si ha un comportamento speculare dei DTF in ramp up e ramp down; per 3500 rpm si ha perdita di contatto per la condizione di ramp up, mentre a 3600 rpm per quella di ramp down.
Considerazioni qualitativamente analoghe possono essere fatte per le altre coppie di ingranaggi analizzate con il modello a parametri concentrati.
5.3.1 Confronto con le normative
Per raccordarsi ai metodi tradizionali con cui viene trattata la dinamica dell’ingranamento, è opportuno effettuare un confronto tra i valori del
93 fattore dinamico DF≈Kv ottenibili col modello a parametri discreti e le
attuali normative più importanti. Il confronto si effettua per rute 80-80:
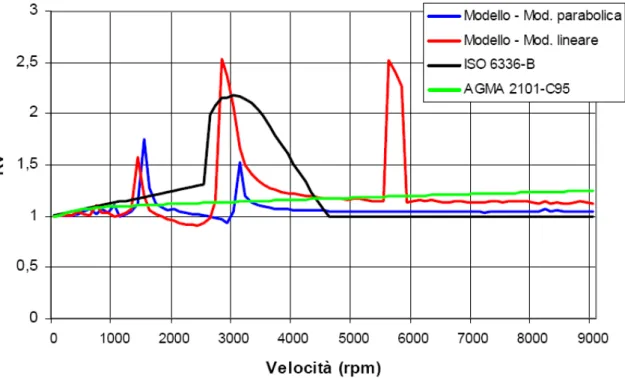
Figura 5.5 – Fattore dinamico KV valutato con il modello e con le principali normative
Per il calcolo del fattore Kv con la normativa ISO 6336-B è stato
impiegato il codice KISSOFT
Si osserva che la normativa AGMA 2101-C95, al di fuori delle frequenze di risonanza, fornisce una stima abbastanza buona e conservativa del valore del fattore correttivo, ma ha la grave mancanza di trascurare del tutto i fenomeni di risonanza.
Il principale pregio della normativa ISO 6336-B è quello di essere in grado di individuare con discreta precisione il picco di risonanza principale, ma non considera la presenza di altre velocità di risonanza e, al di fuori della zona del picco, la stima di Kv appare meno accurata di
Risultati del software sviluppato
94
5.4 PPTE ed errore di trasmissione dinamico
Un altro importante dato fornito dal modello è l’andamento del peak to peak transmission error (PPTE) in funzione del numero di giri e della modalità di simulazione ramp up o ramp down. Confrontando tali risultati con quelli dei fattori dinamici per la stessa coppia di ruote si nota una certa somiglianza tra il PPTE e il DFmf :
95 Figura 5.6 – Confronto dei risultati delPPTE e del DFmf per l’ingranaggio z42-43 con
Risultati del software sviluppato
96 Appare quindi esservi una correlazione tra PPSTE e DFmf:
Figura 5.7 – Correlazione tra PPTE e DF per l’ingranaggio z42-43 con coppia nominale 50 Nm
Questo aspetto è importante in quanto, essendo al PPTE legata la rumorosità, se ne deduce che all’aumentare, per effetto dinamico, del picco di forza scambiata dalle due ruote si ha un incremento della rumorosità prodotta.
Una correlazione più debole sussiste tra il PPTE e il DF:
Figura 5.8 - Correlazione tra PPTE e DFmf per l’ingranaggio z42-43 con coppia nominale 50 Nm
97 Per quanto visto, fintanto che non subentrano fenomeni di contact loss, è buona approssimazione assumere un legame lineare tra PPTE e DFmf. Un
esempio della perdita di linearità tra PPTE e DFmf a causa della perdita di
contatto tra i denti è il seguente per ruote 80-80 con modifica lineare in ramp down:
Figura 5.9 - Correlazione tra PPTE e DF per l’ingranaggio z42-43 con coppia nominale 50 Nm, nel caso di perdita di contatto
Si osserva che quando si ha perdita di contatto tra i denti, a parità di PPTE, il fattore dinamico assume valori minori rispetto a quelli che avrebbero in regime lineare.
Si riportano gli errori di trasmissione che si ottengono per le velocità di 1000 rpm e 3500 rpm:
Risultati del software sviluppato
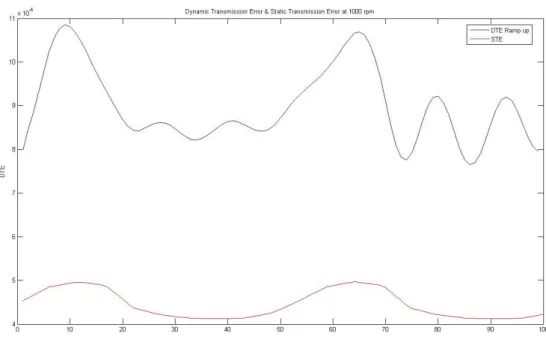
98 Figura 5.10 – Risultati del DTE per l’ingranaggio z42-43 con coppia nominale di
50 Nm alla velocità di 1000 rpm
Figura 5.11 – Risultati del DTE per l’ingranaggio z42-43 con coppia nominale di 50 Nm alla velocità di 3500 rpm
Si osserva che, al crescere del numero di giri, si modifica la forma dell’errore di trasmissione che è costituito da un numero minore di oscillazioni per ciclo; infatti, all’aumentare della velocità di rotazione il
99 sistema riesce a compiere sempre meno oscillazioni per ciclo di ingranamento.
5.5 Analisi dinamica di un ingranaggio a coppia nulla
Le modifiche di profilo permettono di recuperare le deformazioni flessionali dovute all’applicazione del carico, evitando di portare in contatto le teste dei denti con i fianchi dei denti condotti ma, a coppia nulla hanno l’effetto negativo di introdurre un errore di trasmissione altrimenti nullo istante per istante e questo si ripercuote in termini di sovraccarichi dinamici.
Avendo eliminato l’indeterminazione del K(t) dal modello [4] il modello è in grado di fare un’analisi dinamica di un ingranaggio in condizioni di coppia applicata nulla. La forzante del sistema sarà lo STE per una coppia bassa dovuta alle inerzie del sistema, posta come coppia nominale.
A titolo di esempio si riportano i risultati ottenuti per l’ingranaggio z42-43 con coppia nominale di 1Nm:
Risultati del software sviluppato
100 Figura 5.12 – Risultati del PPTE per l’ingranaggio z42-43 con coppia nominale di 1 Nm
101 Figura 5.14 – Risultati del DF per l’ingranaggio z42-43 con coppia nominale di 1 Nm
Si possono poi analizzare i carichi sul dente alle diverse velocità e l’errore di trasmissione dinamico, dei quali non si riportano i risultati avendone già data spiegazione.
5.6 Impieghi pratici del Multi Body Simulation (MBS)
Si è usato il modello per lo studio del comportamento dinamico dell’ingranamento e dei fenomeni non lineari della perdita di contatto, ma si possono avere anche altri campi d’applicazione.
Il pregio principale del modello è quello di fornire in tempi di calcolo rapidi il valore di variabili di progetto, quali il fattore dinamico DF≈Kv e
del PPTE, oltre ad individuare le frequenze di risonanza dell’ingranaggio senza trascurare le deformazioni dei corpi e gli aspetti non lineari.
Risultati del software sviluppato
102 Le curve che descrivono il DF, in funzione delle velocità, sono un output immediato del modello e possono essere utilizzate per la determinazione degli spettri di carico necessari alla progettazione a fatica, in luogo delle curve previste dalle normative ISO ed AGMA che si sono rivelate troppo approssimative per la progettazione di alto livello.
Per quanto visto, si consiglia di applicare un fattore correttivo pari a 1.1 per le incertezze di modello, un fattore di 1.1 per le incertezze sullo smorzamento ed un ulteriore fattore pari a 1.2 (per ruote ad alta precisione) per prevenire conservativamente gli effetti negativi di errori di passo. Inoltre è opportuno che il progettista tenga la velocità operativa dell’ingranaggio adeguatamente a distanza dai valori di risonanza.
5.7 Conclusioni
Ci proponevamo di ottenere un modello discretizzato per lo studio della dinamica dell’ingranamento che tenesse conto della deformabilità elastica delle ruote e dei fenomeni non lineari legati alla perdita di contatto del sistema ed un software in grado di risolvere l’equazione ricavata da tale modello fornendo risultati accurati in tempi relativamente brevi.
Sono stati raggiunti gli obbiettivi che erano stati prefissati, adesso sarebbe necessaria un’ulteriore attività di verifica sperimentale per validare i risultati che si ottengono con il software.
Possibili sviluppi futuri del programma sono quelli di implementare il modello per il calcolo del fattore di sovraccarico KV e modificare il
103 codice per permettere di effettuare una serie di analisi in successione impostando i dati soltanto all’inizio.