Cap.4
Implementazione
del Modello della Macchina
in Ambiente MATLAB Simulink
Figura 4.1 – Schema generale del modello di macchina in ambiente Simulink
Equazioni Elettriche
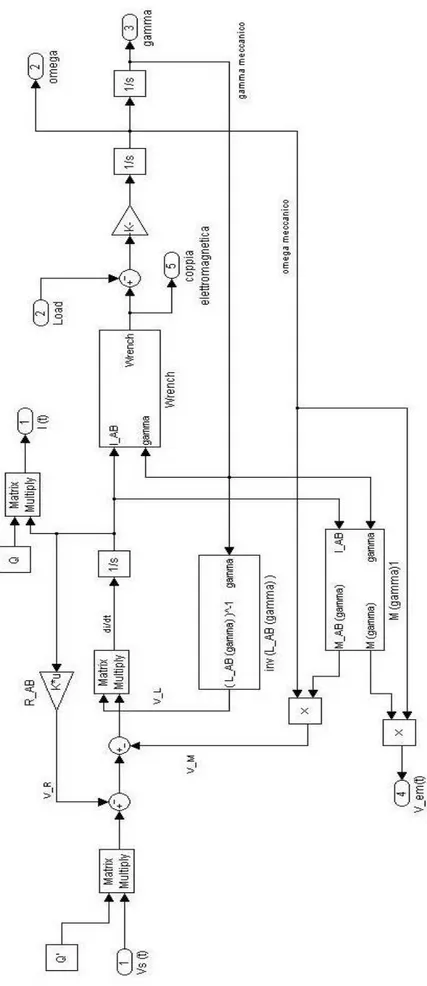
La figura 4.1 riporta lo schema generale del modello implementato in ambiente Simulink; partendo dalla tensione applicata, trifase, V(t), questa viene trasformata, tramite la relazione (3.4), nel corrispondente valore VAB (da questo momento in poi, ove non differentemente indicato, le
grandezze riportate sono da intendersi espresse nel sistema di riferimento bifase AB). L’equazione che esprime il legame tra le grandezze elettriche è
Ω ⋅ + ∂ ∂ + ⋅ = M t i L i R V (4.1)
dove Ω è la velocità angolare del motore e M il vettore delle tensioni mozionali (sia a vuoto che incrementali); tale relazione viene sfruttata per ricavare le correnti, che sono le variabili di stato del sistema, ponendola nella forma
(
⋅ − ⋅Ω)
= ∂ ∂ L− V-R i M t i 1 (4.2)Integrando il risultato della (4.2) si ottengono le correnti, che poi vengono portate in retroazione attraverso un guadagno pari alla matrice delle resistenze.
Gli altri elementi della (4.2), la matrice delle induttanze e il vettore delle tensioni mozionali, come visto dalle equazioni (3.11) e (3.16), dipendono dalla posizione angolare γ del rotore rispetto ad un sistema di riferimento solidale con lo statore, e sono stati implementati nel modo che segue:
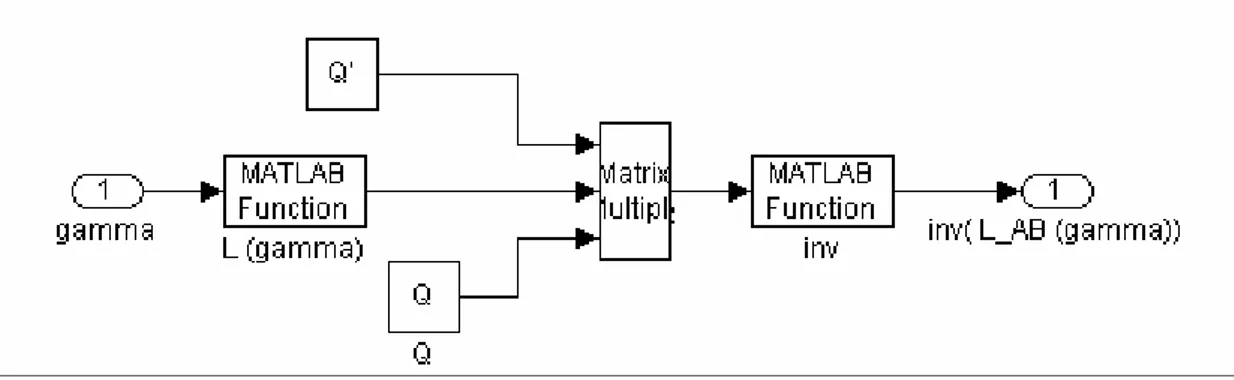
Figura 4.2 – Realizzazione della matrice delle induttanze in ambiente Simulink
La prima MATLAB Function contiene l’espressione delle induttanze, definita nella base trifase secondo la (3.11), in funzione dell’ingresso γ; tale matrice successivamente viene trasformata nel suo equivalente bifase secondo la (1.63) e poi invertita per ottenere la L-1; tale matrice, moltiplicata a destra per il vettore delle tensioni trasformatoriche “V_L(t)”, restituisce la derivata delle correnti.
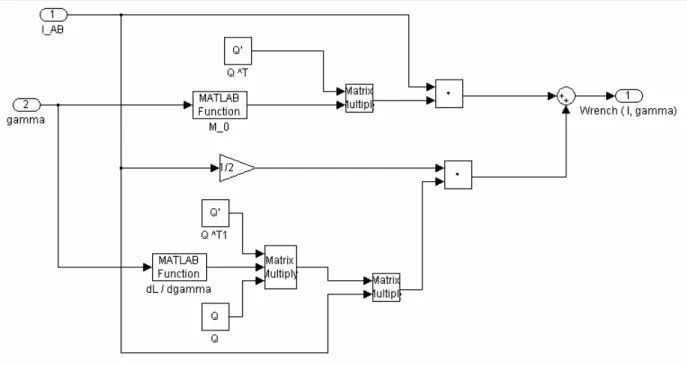
La figura 4.3 invece riporta lo schema con cui si è implementato il vettore delle tensioni mozionali, che è definito come:
( )
M M L i M 0 I 0 ⋅ ∂ ∂ + ∂ Ψ ∂ = + = T γ γ γ (4.3)l’ingresso γ viene portato a due MATLAB Function, una contenente il vettore delle tensioni mozionali a vuoto definito in variabili trifase dalla (3.16), l’altra la derivata rispetto a γ della matrice (3.11).
Figura 4.3 – Realizzazione del vettore delle tensioni mozionali in ambiente Simulink
La trasformazione del vettore M123 dalla base trifase a quella bifase avviene secondo la relazione
⋅ ∂ ∂ + = ∂ ∂ + = ⋅ =Q M Q M L i Q M L Q iAB M 123 123 , 0 T 123 123 123 , 0 T 123 T AB γ γ (4.4)
che è facilmente riscontrabile nella figura 4.3; da questa si vede anche che il vettore delle tensioni mozionali viene portato fuori come uscita anche prima della trasformazione: si è deciso di agire così perché l’uscita M123 è necessaria per poter visualizzare le VM(t) (obiettivo svolto dallo scope
“Vem”), e non si potrebbe ottenere tale visualizzazione partendo dalla MAB, dato che la matrice di
trasformazione Q non è invertibile, non essendo quadrata. Sarà però, ovviamente, la MAB ad essere
moltiplicata per la velocità Ω al fine di calcolare le tensioni mozionali “V_m(t)” da portare in retroazione per implementare l’equazione (4.2) espressa nella base bifase.
Una volta ottenute le correnti nella base AB, queste vengono riportate nella base trifase originaria mediante la trasformazione inversa dell’equazione (1.61).
Equazioni Meccaniche
Alimentando la macchina con la corrente i, si ricava all’albero la coppia WE, espressa dalla
relazione
( )
( )
i L i 2 1 i M i d i L M i d ,i M ,i W T T 0 T 0 T E ∂ ⋅ ∂ ⋅ + ⋅ = ⋅ ∂ ∂ + = =∫
∫
γ γ γ γ (4.5)implementata nel modello secondo quanto riportato in figura 3.4, dove compaiono i blocchi M0 e
dL/dγ, precedentemente descritti, definiti nella base trifase e successivamente trasformati in quella AB
Figura 4.4 – Produzione della coppia elettromeccanica nel modello Simulink
La coppia elettromagnetica prodotta viene visualizzata nello scope “coppia” e contemporaneamente inviata ad un sommatore, dove interagisce con la coppia di carico: si devono infatti ancora determinare le variabili di stato velocità Ω e posizione γ, ricavabili integrando le equazioni
eq E J Load W − = Ω& (4.6) Ω = γ& (4.7)
e considerando le rispettive condizioni iniziali, fornite tramite la maschera dei parametri dei blocchi integratori. Le equazioni ora riportate sono state implementate nel modello, come mostrato dalla
figura 4.1, e le loro uscite possono ora essere portate in retroazione come ingressi delle funzioni L e M o per la determinazione delle VM(t).
Una volta ottenute le variabili di stato, quanto mostrato nella Figura 3.1 è stato riunito in un unico gruppo denominato “Brushless 2cave variabili base”, che ha per ingressi la tensione applicata e la coppia di carico e come uscite proprio le variabili di stato correnti, velocità e posizione, che vengono poi inviate ad opportuni scope per la visualizzazione grafica del loro andamento temporale, come mostrato dalla figura 4.5. Da notare come, dopo questo raggruppamento, le tensioni e correnti sono espresse nella base trifase, quindi di immediata comprensione. Inoltre, si è deciso di visualizzare anche la coppia elettromagnetica motrice e le tensioni mozionali che si raccolgono negli avvolgimenti.
Infine, come si nota nella figura seguente, si è deciso di inserire un blocco che effettui una trasformazione delle correnti di fase utilizzando la matrice di trasformazione di Park (quindi in funzione della posizione angolare γ); questa scelta è stata fatta perché in tal modo si riesce ad analizzare meglio l’evoluzione delle grandezze elettromagnetiche in un’ottica di controllo del motore.
Figura 4.5 – Visualizzazione delle variabili di stato
Controllo
Il valore delle correnti di riferimento è ottenuto implementando delle Look-up Tables i cui elementi sono le radici delle equazioni viste precedentemente; si realizzeranno così delle tabelle ad un unico ingresso (la coppia richiesta) per il controllo a minima corrente al di sotto della velocità base, e tabelle a due ingressi (coppia e velocità) per determinare le correnti di riferimento per il controllo in sovravelocità. Uno switch comandato dalla velocità del rotore provvede, confrontando la velocità
effettiva con quella di base, a scegliere quale dei due set di correnti debba essere utilizzato, come mostrato in Figura 4.6.
Figura 4.6 – Elaborazione delle correnti di riferimento
Si implementeranno due sistemi per il calcolo delle correnti di riferimento, uno basato sui parametri di macchina calcolati a partire dall’approssimazione sinusoidale (dunque utilizzando le equazioni (2.28) e (3.30) ), l’altro in cui dette correnti di vengono calcolate utilizzando gli effettivi parametri del modello (risolvendo perciò le equazioni (3.29) e (3.30) ).
Per il controllo della macchina con tecnica trapezoidale, invece, si è fatto ricorso allo schema seguente:
Figura 4.7 – Controllo trapezoidale
nel quale però il coefficiente M0 è relativo ad una macchina diversa da quella in esame, oggetto del
modello, e quindi si è ricalcolato il vettore dei flussi a vuoto per una macchina che presenti la medesima distribuzione dei magneti permanenti e lo stesso valore di 0ξ, ma sia però isotropa (dunque 2ξ nullo) ed abbia un’unica cava per polo e per fase, presentando lo stesso numero di spire in cava. Una volta effettuato questo calcolo, si arriva ad ottenere un valore di M0 pari a 1.158, e tale
valore viene inserito nel blocco guadagno. A valle di questo è stato inserito un blocco saturatore per evitare di richiedere alla macchina correnti di riferimento maggiori di quella massima ammissibile. La posizione meccanica del rotore, poi, è necessaria per la determinazione delle due fasi in conduzione, come visto precedentemente: a questo scopo assolve il blocco “tabella scelta correnti”,
logica descritta al paragrafo 2.1, facendo inoltre in modo che le fondamentali delle forme d’onda di corrente e di tensione mozionale siano in fase.
Il riferimento di coppia viene fornito da un controllore di tipo PI, che elabora l’errore tra la velocità di riferimento e quella effettiva; in particolare, il regolatore presenta le seguenti caratteristiche: • b N P Ω 0.05 C K ⋅
= , in modo da fornire un contributo proporzionale pari alla coppia nominale in caso di errore pari al 5% della velocità base;
• 05 . 0 Ω 0.05 C T 1 b N I ⋅ ⋅
= , così che la componente integrale, con errore di velocità pari al 5% di Ωb,
riesca a fornire la coppia nominale in 5/100 di secondo.
In questo modo, chiamando eΩ l’errore tra la velocità di riferimento e quella effettiva, il riferimento
di coppia è pari a
( )
= ⋅ +∫
t 0 Ω I Ω P rif e dt T 1 e K t W (4.8)Per evitare di richiedere coppie maggiori di quella nominale, al di sotto della velocità base, o di quella massima producibile ad una data velocità al di sopra di Ωb, si è poi costruita una Look-up
Table che in funzione della velocità effettiva della macchina fornisce la coppia massima erogabile dalla macchina senza oltrepassare i limiti di tensione e corrente. Tale valore determina infine i limiti di coppia (positiva e negativa) di un saturatore dinamico, come mostrato in figura 4.10.
Figura 4.8 – Calcolo della coppia di riferimento
limite di coppia. In tale situazione, una volta che il segno dell’errore si invertisse, la componente integrale comincerebbe a decrescere ma, essendo maggiore della CMAX(Ω), il riferimento di coppia
fornito Crif sarebbe comunque pari alla coppia massima disponibile, continuando così a fornire una
coppia accelerante alla macchina e rendendo dunque meno pronto il sistema di controllo.
Per evitare il fenomeno di wind-up si mantiene costante la componente integrale del regolatore quando questa sia maggiore (in modulo) della massima coppia producibile alla velocità angolare effettiva e contemporaneamente detta componente e la parte integranda dell’equazione 4.48 siano discordi in segno; quando tale situazione si verifica, il termine sotto il segno d’integrale viene sostituito (per effetto dello switch automatico comandato dal circuito logico) dalla costante nulla, così appunto da mantenere costante il contributo integrale alla coppia.
Lo Scope “wlim” visualizza i limiti, inferiore e superiore, della coppia massima erogabile dalla macchina in funzione della velocità, le componenti proporzionale e integrale del regolatore e la coppia di riferimento (eventualmente limitata dal saturatore) che si chiede effettivamente alla macchina, poi inviata ai blocchi di corrente.
Inizialmente, per verificare l’efficacia o meno dei diversi sistemi per il calcolo delle correnti di riferimento, ricavate a partire dai parametri dell’approssimazione sinusoidale (quindi utilizzando le equazioni (2.28) e (2.30) ) oppure dai parametri effettivi del modello sviluppato (calcolando perciò le correnti di riferimento attraverso le (3.29) e (3.30) ), si alimenta la macchina con un amplificatore di tensione, costituito da un regolatore PI, come mostrato in figura 4.9, le cui caratteristiche sono: • KP=100
• KI=2000
così da mantenere un allineamento quasi perfetto tra le correnti di riferimento e quelle effettivamente circolanti negli avvolgimenti di macchina; il segnale così ottenuto viene poi moltiplicato per il guadagno costituito dal rapporto tra la tensione e la corrente nominali della macchina, espresse nel loro valore di picco, per ottenere la tensione con la quale alimentare il motore.