CAPITOLO 1
LA SICUREZZA STRADALE: UN SISTEMA COMPLESSO
1.1 INTRODUZIONE
Ogni giorno in Italia si verificano in media 598 incidenti stradali, che provocano la morte di 13 persone e il ferimento di altre 849. Nel complesso, nel 2008 gli incidenti stradali rilevati sono stati 218.963. Essi hanno causato il decesso di 4.731 persone, mentre altre 310.739 hanno subito lesioni di diversa gravità.
Tra il 2000 e il 2008 si è registrato un calo del 14,6% per quanto riguarda il numero di incidenti, del 13,7% per i feriti e del 33,0% per il numero di morti in incidente (nello stesso arco di tempo il parco veicolare è cresciuto del 17,7%). Contemporaneamente si è registrata una costante riduzione della gravità degli incidenti, evidenziata dall’indice di mortalità (numero di morti ogni 100 incidenti), che si attesta al 2,2% nel 2008 contro il 2,8% del 2000, e dall’indice di gravità, che passa da 1,9 a 1,5 decessi ogni 100 infortunati. Con riferimento all’obiettivo fissato dall’Unione Europea nel Libro Bianco del 13 settembre 2001, che prevedeva la riduzione della mortalità del 50% entro il 2010, l’Italia ha raggiunto una riduzione degli eventi incidentali pari al 30%. L’obiettivo finale non è stato raggiunto e sarà perseguito nel prossimo decennio, ma è comunque la prima volta che si ottiene una riduzione così sostenuta.
Sulla base di quanto detto appare evidente come la sicurezza stradale rappresenta uno degli argomenti di maggiore interesse degli ultimi anni a livello internazionale: è chiaro però che non dovrà essere ristretto esclusivamente agli addetti ai lavori in quanto rappresenta una delle voci di riferimento riguardo ai costi sociali visti sia in termini di vite umane sia in termini di costi per la sanità pubblica.
L’analisi degli eventi incidentali evidenzia la necessità di studiare le relazioni esistenti all’interno di un sistema complesso costituito fondamentalmente da quattro fattori:
- l'ambiente, inteso come condizioni meteorologiche, paesaggistiche, temperatura, ecc;
- l’infrastruttura, con le sue caratteristiche geometriche e funzionali;
- il veicolo, con le sue caratteristiche meccaniche e gli apparati di sicurezza attiva e passiva, ecc.
il driver, caratterizzato da un certo livello culturale, esperienza di guida, condizioni psichiche e fisiche, capacità di percezione del pericolo, ecc..
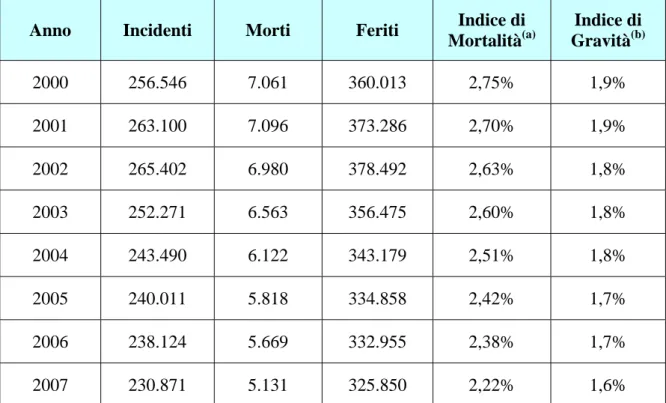
Tabella 1: Incidenti stradali, morti e feriti - Anni 2000-2008 (valori assoluti)
Anno Incidenti Morti Feriti Indice di
Mortalità(a) Indice di Gravità(b) 2000 256.546 7.061 360.013 2,75% 1,9% 2001 263.100 7.096 373.286 2,70% 1,9% 2002 265.402 6.980 378.492 2,63% 1,8% 2003 252.271 6.563 356.475 2,60% 1,8% 2004 243.490 6.122 343.179 2,51% 1,8% 2005 240.011 5.818 334.858 2,42% 1,7% 2006 238.124 5.669 332.955 2,38% 1,7% 2007 230.871 5.131 325.850 2,22% 1,6% (a)
L’indice di mortalità si calcola come rapporto tra il numero dei morti e il numero degli incidenti, moltiplicato 100.
(b)
L’indice di gravità si calcola come rapporto tra il numero dei morti e il numero totale dei morti e dei feriti, moltiplicato 100.
Tra i fattori elencati, il fattore umano risulta la causa principale degli incidenti stradali: infatti, come è possibile osservare dagli studi effettuati negli ultimi anni, il numero degli incidenti mortali che ha come causa principale le condizioni psico-fisiche non ottimali del
della sua soglia di attenzione e di lucidità) oscilla in una percentuale compresa tra il 20% e il 40% del totale; tale percentuale cresce vertiginosamente se il fattore umano viene visto come fattore concomitante nell’evento incidentale (85-90%)
L’analisi del fattore umano e della sua interazione con il veicolo e con l’ambiente circostante diventa, pertanto, un elemento fondamentale per migliorare le condizioni di sicurezza sulle strade.
1.2 IL SISTEMA COMPLESSO
Se si cerca di mettere in relazione tra loro gli eventi incidentali con le cause che li hanno determinati, si osserva come quelle convinzioni derivanti dalle regole progettuali, basate su principi fisici incontestabili, non sono più tali se interpretate alla luce delle molteplici interazioni che si determinano nell'ambito del sistema complesso che regola i rapporti tra uomo – veicolo – strada – ambiente.
Come già premesso, il fattore umano rappresenta probabilmente il parametro principale a cui far riferimento per studiare il fenomeno dell’incidentalità, ragion per cui il ricorso alla psicologia del traffico assume una rilevanza fondamentale per capire il perché di determinati comportamenti su strada.
Fino ad oggi, gli aspetti comportamentali, le condizioni al contorno, le caratteristiche infrastrutturali e la psicologia dei conducenti sono stati analizzati e valutati singolarmente in maniera molto approfondita, trascurando però lo studio dei legami esistenti tra essi e con l’evento incidentale: nasce quindi l'esigenza di studiare il fenomeno dell'incidentalità stradale in termini di sistema, cercando quindi di integrare tutti gli studi di settore che finora sono stati portati avanti in maniera separata, senza mai uscire dai limiti specialistici del settore.
Allo stato attuale, infatti, la psicologia del traffico analizza le condizioni di guida considerando tutte le altre componenti come vere e proprie invarianti di sistema, ed allo stesso tempo l'ingegneria stradale regola le sue scelte progettuali con stretto riferimento alle leggi della dinamica e della cinematica ipotizzando comportamenti dell'utente non verificati sperimentalmente.
L’applicazione della psicologia del traffico agli assunti strettamente ingegneristici può sicuramente fornire utili indicazioni per definire una metodologia che coinvolga tutti i settori interessati ed individuare criteri di progettazione sicuri, basati sulle caratteristiche infrastrutturali, sulle prestazioni e sul comportamento del conducente, e sull’incidente visto come un evento atteso e inevitabile.
Nelle pagine che seguono viene fornita una breve descrizione delle singole variabili costituenti il sistema complesso e delle relazioni che vengono a determinarsi tra di esse, con particolare riferimento a quelle che maggiormente influenzano la variabile uomo.
1.2.1 Veicolo
Il veicolo, innanzitutto, deve garantire efficienza dal punto di vista tecnico e prestazionale e, contemporaneamente, deve agire sulla psicologia del driver e trasmettere una sensazione di sicurezza di guida: nasce, quindi, l’esigenza di far coesistere tutte le innovazioni tecnologiche apportate con gli aspetti psicologici legati al conducente.
In particolare, negli ultimi anni, a seguito di una evoluzione sempre maggiore nel campo dell’elettronica e dei materiali, i veicoli sono stati dotati di misure di sicurezza attiva e passiva sempre più innovative:
- misure attive: servono a migliorare l’assetto del veicolo al fine di evitare incidenti e permettono l’attuazione automatica di alcune azioni volute dal conducente (ABS, ESP, GPS, PRE-CRASH, GRIP, ecc);
- misure passive: riducono il danno nel caso in cui si verifica un evento incidentale (airbag, abitacolo ecc).
A queste misure si aggiungono altri strumenti intelligenti (ITS) che hanno il compito di assistere i conducenti alla guida facendogli rilevare eventuali situazioni di pericolosità (ad es. distanza dal veicolo che precede, calcolo velocità ottimale) oppure fornendo informazioni utili (radio, navigatore, segnali acustici, pannelli a messaggio variabile).
Particolare attenzione va data anche alle informazioni on line che consentono un contatto diretto tra conducente e centrali di controllo al fine di ricevere numerose ed utili informazioni sulle condizioni di circolazione, sul meteo, ecc.
Con l’introduzione di questi moderni dispositivi la guida di un veicolo non è più totalmente dipendente dal conducente in quanto si tende sempre più a trasferire al supporto tecnico del veicolo parte del controllo spettante al conducente: di conseguenza si ha una modifica della psicologia di guida proprio per effetto della diversa attenzione posta dal conducente a seguito dell’attivazione dei sistemi di bordo. Questi sistemi di assistenza, che sicuramente nascono per aumentare la sicurezza della circolazione, possono presentare aspetti controproducenti legati all’uso abituale da parte dell’utente e quindi al crescente affidamento in essi riposto: la psicologia del traffico mostra come in questi casi si generino delle situazioni di pericolo dovute alla minore attenzione durante la guida, che determina, di conseguenza, tempi di percezione e reazione non più adeguati al contesto circolatorio. Il conducente deve quindi conoscere i limiti e le caratteristiche dei vari sistemi con cui interagisce, in modo da utilizzarli in maniera adeguata; allo stesso tempo i sistemi di
assistenza vanno programmati in relazione a quanto detto, “illudendo” cioè il conducente di avere un controllo diretto su di essi.
Tutto quanto detto mostra come i veicoli, allo stato attuale, risultano sempre più all’avanguardia con riguardo alla sicurezza stradale per cui si può affermare che i nuovi sviluppi tecnici non faranno altro che diventare sempre più essenziali nel miglioramento della sicurezza della circolazione, a patto che siano ben integrati con la psicologia del conducente.
1.2.2 Ambiente
La variabile ambiente, vista come condizioni meteorologiche, temperatura, ambiti circostanti esterni all’infrastruttura, rappresenta un aspetto fondamentale e determinante nel valutare l’affidabilità di un sistema stradale sia in termini di sicurezza della circolazione che di qualità dell’ambiente esterno alla strada.
Con riferimento alla sicurezza, la variazione delle condizioni meteorologiche e di traffico provoca, generalmente, un cambiamento nel comportamento dei conducenti e nella percezione dei livelli di rischio: questi cambiamenti si riflettono, in particolare, sulla distribuzione delle velocità operative generando così condizioni sfavorevoli che, a loro volta, determinano un aumento della probabilità di eventi incidentali. Per quel che concerne la qualità dell’ambiente esterno, la trasformazione delle caratteristiche fisiche dell’infrastruttura può determinare un incremento dell’inquinamento acustico e atmosferico.
Le cause dell’inaffidabilità del sistema strada vanno ricercate, perciò, in tutti quegli elementi che rendono le condizioni di circolazione poco sicure: tra questi si possono individuare la velocità, la presenza di pavimentazioni degradate e non regolari, lo scarso coordinamento plano-altimetrico degli elementi.
Nasce quindi la necessità di analizzare queste situazioni e di valutarne l’influenza sulla psicologia del conducente, in modo da capire come questi si pone di fronte alle diverse situazioni; in particolare, dall’analisi di letteratura emerge che le relazioni esistenti tra conducente ed ambiente durante l’attività di guida si manifestano in due momenti distinti: - percezione delle informazioni provenienti dall’esterno, che condizionano e
- reazione dell’utente (sia motoria che psicologica), legata all’elaborazione dell’informazione e all’esperienza del soggetto alla guida.
Una conoscenza più approfondita dei due processi suddetti può permettere l’individuazione di soluzioni, dirette ed indirette, che agiscano sugli apparati sensoriali e condizionare la psicologia del conducente, spingendolo verso comportamenti più prudenti e rendendo così la variabile psicologica meno determinante nel verificarsi di eventi incidentali.
1.2.3 Infrastruttura
Le caratteristiche geometriche di una infrastruttura agiscono in maniera diretta sul comportamento del conducente del veicolo e, in una certa percentuale, sono anche causa o concausa degli eventi incidentali che si verificano lungo il tracciato; per conoscere il rapporto tra le caratteristiche della strada e l’incidentalità si deve capire se le regole progettuali riflettono effettivamente le aspettative degli utenti ed incidono sulla loro psicologia e, di conseguenza, sui processi decisionali.
Gli studi analizzati in letteratura mostrano che le caratteristiche dell’infrastruttura stradale incidono notevolmente sulla psicologia del conducente del veicolo per cui i criteri a cui si fa riferimento per la progettazione sicura di una infrastruttura devono necessariamente seguire metodologie nuove, scientificamente testate, che tengano conto degli effettivi comportamenti al volante, con particolare riferimento a quelli ritenuti più rischiosi.
In base a tali considerazioni è perciò importante stabilire un rapporto tra il grado di sicurezza degli elementi progettati ed il livello di rischio che gli utenti vi associano, per tradurre il tutto in termini di incidentalità potenziale attraverso opportuni modelli matematici.
La determinazione in termini numerici dell’influenza delle caratteristiche geometriche sulla psicologia del conducente e il relativo collegamento con gli standard normativi consentirà di individuare nuovi criteri di composizione dell’asse stradale o di migliorare quelli già adottati, in modo da avere tracciati che meglio rispondono alle aspettative dei conducenti.
E’chiaro che questo nuovo modo di concepire la progettazione sicura di una infrastruttura è strettamente legata alla necessità di mettere in discussione le certezze degli attuali criteri progettuali, basati sul rispetto di standard geometrici assunti in maniera indipendente da tutte quelle valutazioni legate agli aspetti comportamentali e psicologici dei conducenti.
L’obiettivo sarà quello di introdurre nuovi criteri progettuali che tengano conto della complessità del sistema strada: in questo modo sarà possibile definire tracciati che rispecchiano le aspettative degli utenti, percepibili in modo semplice, continuo ed immediato, in modo da garantire tempi di percezione e reazione adeguati e soprattutto una guida meno complessa e di conseguenza, meno affetta da errori.
Nella valutazione della componente infrastruttura non può non considerarsi la variabile
traffico, in modo da tener conto delle molteplici interazioni che nascono tra soggetti con
stili di guida differenti, scopi di viaggio e caratteristiche psicologiche totalmente differenti. Ogni conducente, essendo parte costituente del traffico su una infrastruttura, deve agire in modo da ridurre il numero di interazioni possibile tenendo conto del fatto che attorno a sé possono esserci stati d’animo, necessità e/o urgenze che possono portare a comportamenti più o meno prudenti o aggressivi: ogni conducente deve pertanto rispettare le esigenze altrui ed il comune bisogno di sicurezza senza cercare di imporre il proprio stile di guida ed individuando le azioni che determinano meno rischi
E’evidente che le variabili in gioco sono così tante da rendere il problema molto difficile da affrontare: su tutte, velocità e condizioni psicologiche dei conducenti determinano una serie di situazioni di emergenza che portano i conducenti sempre al limite delle proprie capacità di controllo, con un conseguente incremento della probabilità di accadimento di errori alla guida. Se a questo aggiungiamo che la componente psicologica tende a condizionare maggiormente l’utente, si può ritenere che nella maggioranza dei casi lo stato d’animo dei conducenti prevale sulla razionalità ed i driver, quindi, tendono ad assumere comportamenti più pericolosi che, probabilmente, in condizioni normali non avrebbero tenuto.
In base a tali considerazioni risultano molto importanti le analisi legate alle condizioni di guida in presenza di traffico intenso, quando il carico di lavoro e la quantità di informazioni da acquisire ed elaborare sono notevoli.
1.2.4 Utente e comportamento al volante
L’uomo rappresenta la variabile più imprevedibile del sistema in quanto, durante la marcia, può adattarsi alle condizioni esterne o, viceversa, essere poco incline a modificare il suo comportamento al variare delle componenti del sistema.
Considerato che all’origine di un evento incidentale c’è molto spesso una serie di errori umani e che questi sono determinati più facilmente da un comportamento aggressivo o poco prudente che da una scarsa abilità, l’aspetto psicologico del conducente va necessariamente considerato in maniera prioritaria nelle analisi di sicurezza.
La valutazione dei condizionamenti psicologici sul comportamento al volante passa, prima di tutto, attraverso l’analisi di alcune caratteristiche di base degli utenti (come ad esempio la formazione culturale, il carattere, ecc), rispetto alle quali vanno poi individuate misure specifiche che modificano lo stile di guida verso comportamenti più prudenti.
Sarà compito del progettista, pertanto, rivolgere la propria attenzione verso l’analisi degli stili di guida delle diverse categorie di persone sia dal punto di vista psico-fisiologico che in funzione della loro formazione culturale e del periodo in cui hanno ricevuto educazione stradale: questo consentirà di evidenziare aspetti come il tempo di percezione e reazione, la prontezza di riflessi, la coordinazione, l’abilità e, contemporaneamente, lati della personalità dei soggetti come prepotenza ed aggressività.
Quanto sopra detto evidenzia come al progettista spetti un ulteriore compito educativo, che spinga gli utenti verso comportamenti più responsabili: il raggiungimento di questo obiettivo, come è evidente, non può prescindere da uno scambio di conoscenze con altri ambiti di ricerca, in modo da caratterizzare la variabile uomo nella maniera più completa possibile.
Per effettuare una corretta analisi dello stile di guida è necessario considerare una serie di fattori principali che vengono riportati qui di seguito:
- aspetti della persona: cultura, esperienza, abilità di guida;
- psicologia: percezione del rischio, distrazioni, paura, tempi di scelta ridotti, personalità; - aspetti fisiologici: stanchezza, affaticamento, forma fisica non ottimale;
- ambiente esterno: condizioni meteo, luminosità, rumore, temperatura; - infrastruttura: segnaletica,condizioni pavimentazione;
- veicolo: stato di manutenzione del veicolo.
Accanto agli aspetti sopraelencati è necessario eseguire una analisi degli errori che generalmente vengono commessi durante l’esercizio della guida: questi, generalmente sono combinazione di più cause legate ad inesperienza o al raggiungimento di situazioni al limite che, combinandosi, determinano una risposta inadeguata del conducente. In particolare si dovranno valutare:
- fattori umani correlati all’insorgere dell’errore; - conseguenze della manovra errata;
- possibilità di dilatare i tempi consentiti per l’esecuzione dell’azione; - sovraccarichi mentali legati a situazioni di emeregenza.
L’analisi combinata degli stili di guida e delle tipologie di errore permetterà al progettista di individuare le azioni di mitigazione più opportune.
L’analisi della letteratura in materia mostra che il comportamento al volante e le risposte dei conducenti sono valutati, allo stato attuale, attraverso modelli basati sul processo di elaborazione delle informazioni; gli studi più recenti, invece, cercano di approfondire questo tipo di modellazione aggiungendo un ulteriore step che permetta di descrivere il processo decisionale anche in funzione dei fattori psico-biologici che condizionano ogni guidatore.
E’chiaro quindi che l’obiettivo primario diventa quello di individuare delle soglie di riferimento che siano compatibili con una guida sicura e che siano implementabili in modelli di progettazione. Prima di far tutto questo è necessario un passo preliminare consistente nella definizione di una serie di gruppi di soggetti, con determinate caratteristiche fortemente influenzanti l’aumento di incidentalità, i cui comportamenti possano essere tenuti sotto controllo entro certi limiti.
La breve analisi del sistema complesso condotta fino a questo punto mette in evidenza come gli aspetti legati alla psicologia del traffico stiano assumendo sempre maggiore importanza nell’ambito della progettazione stradale a cui però non fanno riscontro adeguate sperimentazioni sul campo integrate con gli aspetti strettamente legati all’ingegneria stradale.
In base a ciò si ritiene basilare inserire aspetti legati alla modellazione psicologica e alla caratterizzazione fisologica e genetica della variabile uomo, e associarli ai test in realtà virtuale in modo che la sperimentazione tenga conto di più metodologie in base alle quali è possibile trovare utili indicazioni nella progettazione del sistema complesso e nella sua gestione, con particolare riferimento alle varie condizioni che si hanno nell’esercizio della guida.
1.3 IL FATTORE UMANO COME CAUSA DI INCIDENTALITÀ
1.3.1 Premessa
La sicurezza stradale viene generalmente studiata in funzione del numero di incidenti che si verificano su una data infrastruttura stradale; tale criterio, tuttavia, è concettualmente limitato ed impreciso in quanto la sicurezza stradale rappresenta qualcosa che va al di là del verificarsi di un evento incidentale. Per definizione statistica, infatti, gli incidenti rappresentano un “evento raro” ed il loro verificarsi è dovuto al caso e a fattori sistematici a cui devono necessariamente aggiungersi i problemi legati alla individuazione e alla registrazione delle cause incidentali, spesso riportate in maniera insufficiente o in maniera poco attendibile.
I limiti di questa definizione possono essere superati ricorrendo al modello proposto da Hauer [1] che tiene conto, oltre che degli eventi incidentali, anche dei comportamenti tenuti dall’utente prima che questi si verifichino: in pratica il tutto viene schematizzato con una piramide, dove si passa da comportamenti di guida imperturbati, ubicati alla base, ad incidenti fatali, in sommità, passando attraverso errori del driver che determinano situazioni al limite e conflitti nella guida (Figura 1).
Il modello, molto potente dal punto di vista concettuale, non ha trovato piena applicazione in quanto nella pratica si tende ad utilizzare e considerare solo gli incidenti mentre i conflitti, gli errori e le situazioni al limite molto spesso vengono ignorati. L’utilizzo di questi ultimi, unito all’ipotesi che sono anch’essi responsabili del verificarsi di un incidente, consentirebbe di avere così un dato statistico molto più consistente che permetterebbe valutazioni sul grado di sicurezza di una infrastruttura.
Per poter applicare tutto questo è necessario però caratterizzare gli utenti al fine di studiare le loro reazioni al volante nelle diverse situazioni di guida, in modo da riconoscere e catalogare le cosiddette manovre al limite in maniera oggettiva.
L’obiettivo del presente capitolo è quello di individuare e riassumere i principali studi condotti nell’ambito della psicologia del traffico e delle scienze biologiche, da utilizzare come base di riferimento per lo studio della sicurezza sulle strade urbane ed extraurbane. Nello specifico, verranno presi in considerazione quei modelli esplicativi del comportamento di guida che valutano le reazioni del conducente ad uno stimolo esterno o attraverso l’analisi dei dati rappresentativi delle condizioni di marcia del veicolo (velocità, accelerazione, posizione laterale, distanze di frenatura, angolo di sterzo) o analizzando l’analisi dei dati psico-fisiologici del guidatore stesso.
1.3.2 La caratterizzazione psicologica degli utenti alla guida
Gli studi presenti in letteratura riguardanti la spiegazione delle cause incidentali mostrano che circa il 50% degli incidenti è dovuto alla variabile uomo, e che tale percentuale aumenta drasticamente fino al 90% se il comportamento dell’utente rappresenta una concausa associata alle altre variabili del sistema complesso precedentemente analizzate. Le stesse statistiche evidenziano, inoltre, che la frequenza degli eventi incidentali dovuti ad errori umani presenta una certa variabilità a seconda della zona che si va ad analizzare: in particolare, dall’analisi dei dati appare da subito evidente che il contesto in cui si sviluppa l’infrastruttura e le caratteristiche della stessa giocano un ruolo fondamentale nel generare una combinazione di situazioni e comportamenti al limite che possono favorire un evento incidentale.
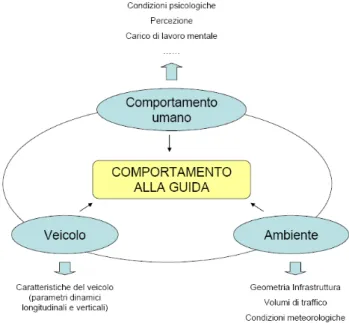
L’analisi del comportamento di guida deve quindi partire dal presupposto che esso non è altro che il risultato delle interazioni tra comportamento umano, caratteristiche del veicolo e suo stato di manutenzione, e caratteristiche ambientali ed infrastrutturali (Figura 2). Entrando nel merito delle teorie sul comportamento di guida si può affermare che si sono evolute negli anni, soprattutto a causa dell’esigenza di dover associare i dati di incidentalità con le caratteristiche dei conducenti dei veicoli, in modo da poter individuare le cause principali ed estrapolare modelli validi da applicare nella progettazione.
riscontrato notevoli difficoltà perché hanno considerato il campione da un punto di vista aggregato, senza tener conto delle evidenti differenze tra i diversi gruppi analizzati (differenze di età, sesso, personalità ecc).
Figura 2: il comportamento di guida – schema di modello funzionale
Negli anni si sono poi sviluppati modelli che hanno tenuto conto delle differenze individuali ed altri, definiti modelli funzionali, che hanno preso in considerazione le complesse interazioni che si verificano alla guida.
I modelli funzionali sono sicuramente quelli più significativi nello spiegare il comportamento di guida e si dividono in due grandi categorie:
- modelli cognitivi e percettivi, basati sull’elaborazione delle informazioni;
- modelli motivazionali, in cui il driver gestisce in maniera autonoma la sua andatura e modifica il suo comportamento secondo i suoi propri scopi, in funzione del carico di lavoro e del rischio percepito.
E’ chiaro ed evidente che lo studio dei comportamenti di guida è molto più complesso e richiederebbe un modello che riunisce tutte le ipotesi considerate dai vari modelli sopra menzionati.
Una definizione generale di riferimento per lo studio del comportamento di guida è sicuramente quella fornita da Elvik & Vaa [2] secondo cui “il coinvolgimento nel rischio
di incidente per gruppi di età diversa, per unità di tempo e distanza, tende ad essere a forma di U”.
Tale definizione, in pratica, definisce una ovvia correlazione tra il rischio di coinvolgimento in incidenti e le variabili età, esperienza di guida e distanza percorsa, che, però, non basta a spiegare da sola il complesso fenomeno della incidentalità.
Accanto a queste variabili di riferimento, pertanto, vengono presi in considerazione altri fattori discriminanti quali, ad esempio, lo stato del guidatore, che permette di tener conto di condizioni di breve termine come il carico di lavoro e l’affaticamento, e le caratteristiche psicologiche, rappresentative, invece, di stati comportamentali di lunga durata come l’istintività o l’essere estroverso/disinibito. Questi ultimi, in particolare, assumono un certo rilievo nello studio delle cause incidentali e vengono denominati “Sensation Seeking”: riprendendo la definizione di letteratura, si può affermare che il Sensation Seeking [3] [4] è “la ricerca di varie, nuove, complesse ed intense sensazioni ed esperienze e la volontà di
assumere un rischio fisico, sociale, legale e finanziario per il desiderio di tale esperienza”.
Gli studi condotti negli anni su questi aspetti comportamentali hanno portato alla definizione di una scala
L'aspetto interessante tratto dall’analisi dei punteggi ottenuti dalla somministrazione del test e dagli studi condotti a livello internazionale, è che i sensation seekers con punteggi elevati non cercano necessariamente le situazioni ad alto rischio, ma tendono a stimarle come meno rischiose rispetto a soggetti che hanno ottenuto punteggi più bassi, determinando così comportamenti al limite o situazioni di incertezza per gli altri utenti con cui interagiscono.
L’analisi condotta sulla letteratura in merito all’applicazione della Sensation Seeking Scale mostra, inoltre, come le differenze individuali incidano, a volte in maniera anche importante, sul comportamento di guida; tuttavia, non sono in grado da sole a descrivere in maniera sufficiente il problema per cui è necessario integrare tali modelli con altri aspetti strettamente connessi al complesso atto della guida.
L’ultima versione della scala elaborata da Zuckerman (SSS – Form V) è stata presa in considerazione e somministrata, previa rielaborazione e traduzione adattata alla realtà italiana, durante lo sviluppo del presente progetto di ricerca allo scopo di definire le differenze individuali dei conducenti poi impegnati nei test al simulatore di guida. I risultati ottenuti sono illustrati nei capitoli successivi della presente Tesi.
Per capire l'importanza degli aspetti psicologici e la loro influenza sul comportamento di guida, la struttura del Sensation Seeking viene descritta in dettaglio in appendice al
1.3.3 I modelli gerarchici e di errore – Il Driver Behaviour Questionnaire
Alla base dei modelli gerarchici di comportamento vi è l’ipotesi che la guida è un insieme di operazioni che si sviluppa generalmente su tre livelli (navigazione – manovra – controllo) per la risoluzione di un certo dilemma [5].
Tali operazioni vengono in genere classificate in funzione di:
- compito da eseguire, tempo di esecuzione, esperienza del conducente;
- abilità e conoscenza delle regole da parte del conducente a svolgere un determinato compito.
Nello specifico, i tre livelli individuati dal modello vengono così definiti:
- il livello strategico o di navigazione comprende tutti i processi riguardanti le decisioni di viaggio. Le decisioni relative a questo livello hanno maggiore durata e, considerata la loro natura, tendono a diventare abitudini nel caso di costanti ripetizioni e ad essere trattate in maniera più consapevole dal conducente;
- le decisioni a livello di manovra sono prese in pochi secondi e riguardano generalmente il sorpasso, la svolta, o il gap acceptance. Il livello di manovra è perciò influenzato da variabili legate al comportamento e alle situazioni.
- le operazioni riguardanti il livello di controllo sono invece prese in intervalli di tempo molto piccoli e sono generalmente automatiche (risposte ad uno stimolo come ad esempio tenere la corsia e cambiare la marcia).
L’analisi di questo tipo di modelli mostra la molteplicità di compiti che caratterizza la guida di ogni driver e come questa sia influenzata dagli aspetti comportamentali. Tali modelli sono perciò consigliati per cercare di spiegare il perché di comportamenti scorretti, classificare le categorie di utenti e predire determinate categorie di errori.
Tra i modelli gerarchici si individuano i cosiddetti modelli di errore: la struttura di tali modelli prevede un livello basato sulle capacità del conducente e precedente l’individuazione di una certa situazione, ed un livello incentrato sulle regole e sulla conoscenza del driver in seguito alla individuazione di una certa situazione critica.
L’analisi degli studi eseguiti nel corso degli anni evidenzia che i driver tendono a seguire comportamenti basati sulle loro capacità, in quanto c’è una minore richiesta di risorse mentali; sempre in virtù di tale motivazione gli utenti tendono a preferire comportamenti basati sulle regole piuttosto che quelli basati sulle conoscenze.
Tra i modelli di errore presenti in letteratura quello di riferimento è senz’altro quello proposto da Reason [6] in cui si fa una netta distinzione tra errore e lapsus: quest’ultimo è considerato come errore compiuto nella esecuzione di un compito mentre l’errore è legato a disattenzione o a problemi di memoria e si verifica ogniqualvolta che non è necessaria
nessuna soluzione consapevole dei problemi (cali di attenzione ad esempio). Questi ultimi
si classificano a seconda che si abbiano:
- errori a livello di regole: si verificano quando la risoluzione della situazione critica si ha attraverso una azione cosciente in base ad esperienze su problemi noti simili;
- errori a livello di conoscenza: si verificano in seguito ad azioni eseguite in maniera cosciente su problemi nuovi; possono assumere una grande varietà di forme.
L’analisi dell’insieme di lapsus ed errori che si verificano lungo un dato tronco stradale potrebbe permettere di individuare quelle informazioni non rilevanti che distolgono l’attenzione del conducente dal compito di guida e che determinano manovre scorrette. Accanto agli errori appena descritti il modello proposto da Reason considera anche le violazioni che però non possono prescindere dal contesto sociale in cui accadono.
Il modello è stato applicato e verificato attraverso l’introduzione del “Driver Behaviour Questionnaire” [7] la cui struttura viene spiegata in appendice alla presente Tesi. L’analisi dei dati ottenuti attraverso la somministrazione del test a livello internazionale ha mostrato risultati promettenti: si nota però che l’applicazione del DBQ è utile soprattutto per predire gli errori di guida, le violazioni, o il coinvolgimento in incidente di un individuo sulla base del suo comportamento passato per cui risulta assolutamente necessario integrare tale tipo di analisi con altre tipologie di studio per poter essere utilizzato a scopi progettuali.
In virtù di tali considerazioni, questa tipologia di test è stata utilizzata ai fini della caratterizzazione psicologica dei volontari partecipanti ai test simulati, correlando i punteggi ottenuti con quelli risultanti dalla somministrazione della Sensation Seeking Scale attraverso una analisi cluster: tale procedura ha permesso di individuare classi di utenti analizzate in funzione del relativo comportamento al volante risultante dai test effettuati al simulatore.
1.3.4 Elaborazione delle informazioni e percezione del rischio
L’analisi del comportamento di guida passa anche per la spiegazione dei processi di elaborazione delle informazioni e la percezione del rischio di determinati gruppi di individui.
L’elaborazione delle informazioni consiste fondamentalmente in una successione di step consistente nella selezione delle informazioni più rilevanti, l’elaborazione di queste e la conseguente azione.
Gli utenti della strada sono per lo più convinti di avere la capacità di valutare autonomamente i propri rischi e credono, generalmente, di essere in grado di effettuare, a titolo personale, una analisi intelligente delle situazioni. Essi, inoltre, sono convinti di avere la capacità di adattarsi alle condizioni del movimento e dunque di poter avere una discrezionalità nell’applicazione delle regole. Sulla base di queste considerazioni la sicurezza tende a basarsi su scelte individuali e su un filtro di valutazione personale e non sulla arbitrarietà delle regole, creando così l’illusione di poter gestire un rischio.
I modelli di riferimento in letteratura si basano o sul concetto di consapevolezza della situazione e sul livello di attenzione o, altrimenti, evidenziano l’importanza delle caratteristiche ambientali e l’influenza di queste sui tempi di azione da parte dei conducenti.
Prima di esaminare i modelli presenti in letteratura applicabili alla sicurezza stradale si passa a definire il concetto di “locus of control” [8], definito come una variabile psicologica che indica il grado di percezione rispetto al controllo del proprio destino e agli eventi.
Le ricerche sul tema ne dimostrano la centralità e impongono un ruolo determinante della ‘posizione’ del LoC; in particolare un individuo può essere caratterizzato da:
- LoC "esterno": attribuisce prevalentemente al destino o agli "altri" il controllo di quanto accade;
- LoC "interno": il soggetto è indirizzato a considerare il destino come un effetto delle proprie azioni e quindi come una variabile su cui poter intervenire.
In pratica, il locus of control rappresenta l'atteggiamento mentale con cui un utente è in grado di determinare le proprie azioni rispetto a quanto accade nell’ambiente circostante. Sulla base di quanto esposto finora appare quindi evidente che l’elaborazione delle informazioni da parte di un conducente di un veicolo deve essere spiegata ricorrendo ai
cosiddetti modelli funzionali: nasce cioè la necessità di concentrarsi sulla percezione e sui processi cognitivi coinvolti essendo gli errori di percezione e riconoscimento e gli errori di decisione tra i fattori maggiormente rilevanti nell’individuazione delle cause di incidente. Nell’ambito della sicurezza stradale questi aspetti sono di fondamentale importanza soprattutto in relazione alle aspettative degli utenti, definite come il confronto della realtà osservata con le rappresentazioni della realtà incamerate in memoria: tra queste si attiverà quella che fornisce la maggiore somiglianza con quella osservata.
L’insieme delle rappresentazioni costituisce il cosiddetto schema o modello mentale, che permette di distinguere ciò che è importante e ciò che merita attenzione e va quindi ad influire sulla scelta delle azioni da compiere.
La definizione di schema mentale più attinente nello studio degli human factors è sicuramente quella fornita da Wilson et Rutherford [9]: “un modello mentale è una
rappresentazione formata da un utente di un sistema, basato sia su precedenti esperienze sia su osservazioni correnti, che fornisce la maggior parte (se non tutto) ciò che è stato compreso del susseguente sistema e di conseguenza detta il livello di prestazione del compito”.
Gli schemi mentali possono però essere, al tempo stesso, causa di azioni o assunzioni difettose in virtù del fatto che sono semplificati rispetto alla realtà e che il loro uso tende ad essere automatico invece che consapevole: se pertanto gli stimoli risultano essere male interpretati la risposta che ne deriva dallo schema mentale associato porta induce a compiere manovre scorrette.
1.3.5 Modelli di rischio – Risk Homeostasis Theory
A differenza dei modelli percettivi, basati sulle caratteristiche comuni dei conducenti di un veicolo, i modelli di rischio si fondano sulle differenze individuali e su fattori motivazionali e situazionali.
Per la definizione dei modelli di rischio va fatta, prima di tutto, una distinzione tra rischio soggettivo ed oggettivo:
- rischio soggettivo: rischio valutato dal conducente attraverso la percezione dell’ambiente stradale;
In generale questi due aspetti interagiscono tra di loro e si verifica che le situazioni sono tanto più pericolose quanto più il rischio soggettivo è minore rispetto al rischio oggettivo: infatti, chi guida corregge il suo comportamento in relazione al rischio soggettivo percepito, non a quello oggettivo. Il concetto di rischio soggettivo come meccanismo rilevante per il comportamento di guida è stato sviluppato in maniera molto approfondita dallo psicologo canadese Gerald Wilde attraverso la teoria nota come omeostasi del rischio (Risk Homeostasis Theory) [10] e di cui si riportano le nozioni principali in appendice al presente lavoro di tesi.
In termini molto generali, Wilde afferma che ogni individuo possiede un determinato livello di rischio, il cosiddetto “rischio accettabile”, che rappresenta il livello di pericolo che ciascuno è disposto ad accettare in cambio dei risultati che ne derivano. In presenza di meccanismi che tendono a ridurlo, questo livello di rischio, a causa del processo omeostatico, tende a ristabilirsi nel proprio valore originale (Figura 3).
Figura 3: Livelli di rischio accettabile
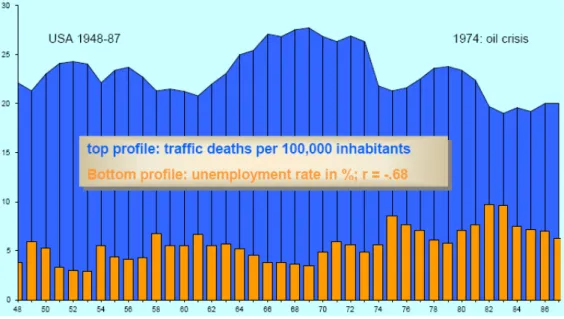
Secondo la teoria di Wilde i soli interventi ingegneristici non determinerebbero effettive riduzione di incidenti: in merito esistono studi e pubblicazioni che sostengono queste teorie e mostrano che la tendenza al ribasso in termini di mortalità è dovuta a fattori demografici, all’aumento della sicurezza passiva e al progresso in campo medico (ad es. il tasso di incidentalità con il tasso di disoccupazione riportato in Figura 7).
Figura 7: Tasso di incidentalità legato al tasso di disoccupazione (ripreso da Hauer)
Gli studi di settore condotti a livello internazionale non hanno fatto altro che fornire ulteriori elementi di supporto alla teoria: è stato ad esempio dimostrato che l’obbligo delle cinture per guidatore e passeggero ha coinciso con l’aumento delle morti da traffico tra pedoni (+ 8% ), ciclisti, (+13%) e occupanti dei sedili posteriori che non indossavano cinture (+28%). Ulteriori studi, inoltre sono giunti a conclusioni analoghe che riguardano non soltanto il fenomeno dell’omeostasi derivante dalle dotazioni del veicolo ma anche determinato dal miglioramento dell’infrastruttura stradale finalizzato alla sicurezza: si è visto, infatti, che in numerosi casi l’installazione di semafori sulle intersezioni non aveva cambiato la frequenza delle collisioni, oppure che la realizzazione di piste ciclabili a margine della carreggiata aveva incoraggiato la velocità dei ciclisti aumentando il numero degli incidenti in prossimità delle rotatorie.
Quanto detto finora dimostra, quindi, che gli sforzi infrastrutturali prodotti per ridurre l’incidentalità possono non ottenere i risultati sperati e risultare a volte controproducenti per cui il fenomeno dell’invarianza del rischio rappresenta un aspetto non trascurabile da tenere in considerazione in ogni fase di realizzazione dell’infrastruttura, dalla progettazione alla costruzione e fino ai successivi interventi di adeguamento. Sarà quindi necessario procedere alla valutazione del comportamento delle utenze stradali, così come è stato fatto nel caso degli autoveicoli, e stabilirne il grado di adattamento, individuando e applicando le misure correttive necessarie a contenere il fenomeno dell’invarianza.
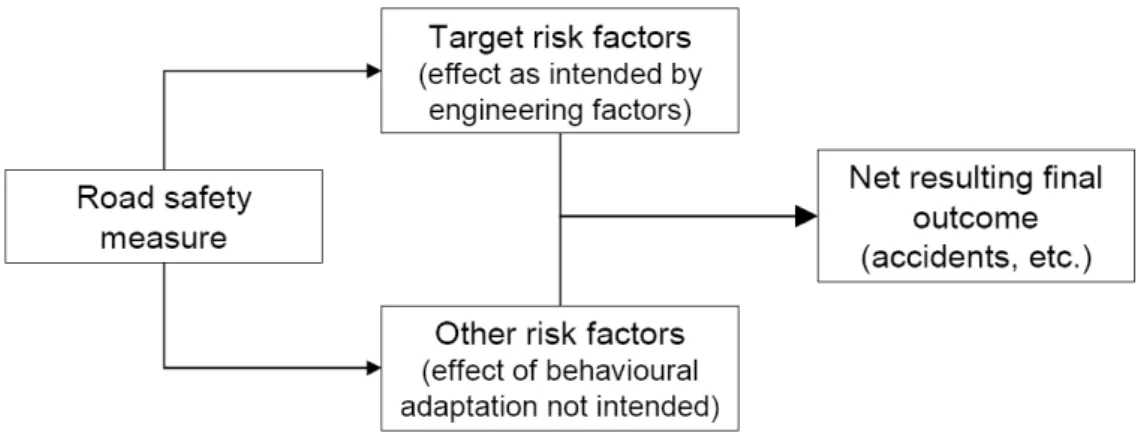
Le recenti affermazioni della OCSE (Organizzazione per la Cooperazione e lo Sviluppo Economico) [11] non fanno altro che sostenere questa ipotesi, definendo l'adeguamento del comportamento nel traffico come un comportamento che può verificarsi in seguito
all'introduzione di modifiche al sistema veicolo-strada-utente, e concludendo che il risultato netto positivo o negativo dipende dalla quantità degli adattamenti comportamentali (Figura 8). Questi ultimi, in particolare, vengono definiti come “…l’insieme di quei comportamenti che si possono verificare nel sistema strada – veicolo – utente;…gli adattamenti comportamentali si realizzano quando gli utenti rispondono ai cambiamenti del sistema in funzione delle proprie necessità personali, creando un continuo di situazioni più o meno sicure”.
Figura 8: Adattamento comportamentale:conseguenza finale risultante per la sicurezza (ripreso da Elvik & Vaa).
Alcune sperimentazioni sembrerebbero confermare l’esistenza del fenomeno dell’invarianza anche nel caso dell’infrastruttura “sicura” e ricondurrebbero alla conclusione che la sicurezza della strada (intesa come affidabilità della pavimentazione, ampiezza della carreggiata, esistenza di dispositivi di illuminazione, etc.) non è di per sé sufficiente ad abbassare il livello di rischio individuale necessario per la riduzione dell’incidentalità stradale. Infatti, determinati tipi di strade, pur essendo tecnicamente ineccepibili, favorirebbero l’omeostasi, diminuendone il tempo di adattamento, e provocherebbero l’aumento delle velocità, vanificando in tutto o in parte i benefici indotti dalla strada strutturalmente sicura.
Globalmente si è difatti osservato che l’infrastruttura “sicura” se da un lato è in grado di abbattere il tasso di incidentalità derivante dal sistema ambiente (mediamente stimato nel 10% sul totale percentuale delle cause di incidente) dall’altro lato, attraverso il fenomeno
dell’omeostasi prodotto dall’infrastruttura, favorisce atteggiamenti di guida pericolosa, prima tra tutti la guida veloce, stimabile secondo le statistiche nel 18% circa sul totale delle cause: ciò significa che, in termini puramente aritmetici, si verifica un aumento della sinistrosità su strade sicure pari all’8% circa. Questo valore, se provato sperimentalmente, rappresenterebbe un dato preoccupante e dimostrerebbe che una strada ritenuta tecnicamente sicura, così come il veicolo, incoraggia comportamenti pericolosi e aumenta il rischio di sinistrosità.
Un altro modello di riferimento, molto vicino alla RHT di Wilde, che considera il rischio come un importante parametro nel comportamento di guida è stato proposto da Näätänen e Summala; a differenza di Wilde, Näätänen e Summala [12] sostengono che i guidatori minimizzano il rischio soggettivo, portandolo vicino allo zero.
Concludendo, la RHT, le teorie sull’adattamento comportamentale e tutti quei modelli ad essa molto vicini appena citati ed illustrati, hanno dato un forte impulso nella comprensione del comportamento di guida: Elvik & Vaa [2], in particolare, evidenziano i difetti di queste teorie ma, allo stesso tempo, sono d'accordo con gli altri ricercatori sul fatto che abbiano identificato importanti meccanismi che dovrebbero essere presi in considerazione quando si spiegano le cause che determinano l’evento incidentale.
1.4 LA RICERCA IN REALTA’ VIRTUALE
Nel momento in cui l’analisi incidentale dimostra che la progettazione di un’infrastruttura stradale intrinsecamente “sicura” deve necessariamente tener conto del comportamento dell’utente, nasce l’esigenza di definire regole che possono governare l’esercizio della guida nelle diverse condizioni di circolazione e valutare come queste regole possono variare in funzione dello stato psicofisico del conducente.
La questione in esame non è di così facile soluzione e tende a diventare più complessa a causa della variabilità delle condizioni che caratterizzano l’esercizio della guida: queste, infatti, influenzano in modo diverso i singoli utenti durante la guida, sia in relazione alla loro esperienza, sia alle loro capacità al volante. A questo si sovrappone il fatto che esistono una serie di fenomeni difficilmente riconducibili a schemi elementari, come quelli legati all’affaticamento indotto dalla ripetitività degli eventi e al disagio derivante dalle condizioni ambientali, oltre alla possibilità della corretta definizione delle soglie di rischio, che, per le variabili della circolazione, possono indurre manovre al limite delle condizioni di sicurezza.
Con riferimento a quanto appena detto, la psicologia del traffico offre un importante contributo verificando sperimentalmente modelli comportamentali che spiegano i processi cognitivi e decisionali di un utente durante la guida.
Tuttavia, il più delle volte, le correlazioni individuate ed esplicitate sono espresse in termini del tutto generali e non tradotte in modelli numerici utilizzabili per la determinazione di standard progettuali. A tutto questo si aggiungono, come già accennato in precedenza, tutti quei limiti altrettanto significativi che si hanno in relazione alle sperimentazioni che si possono eseguire sul campo, in quanto non è possibile eseguire un numero rilevante di casi che assicurano la validità statistica di ogni singolo caso che può verificarsi in ambito stradale.
Fino ad oggi, nel campo dell’ingegneria stradale, quanto detto finora non ha rappresentato un vero e proprio problema per due motivi principali:
- le regole dell’ingegneria stradale si sono basate su modelli progettuali che non tengono conto né delle interferenze veicolari né della variabilità delle condizioni di esercizio; - la genericità e l’incertezza dei fenomeni che riguardano il comportamento umano al
volante è stata governata imponendo a priori uno standard di velocità e adottando opportuni gradi di sicurezza per gestire tale variabile in relazione alla geometria d’asse.
Appare chiaro ed evidente come questo tipo di impostazione non risulta più adeguata al giorno d’oggi a seguito delle maggiori prestazioni dei veicoli e alla sempre maggiore evoluzione dei flussi circolatori, che non consentono più di far riferimento alla condizione di marcia del veicolo isolato. D’altro canto, l’assenza di un modello circolatorio affidabile e ben strutturato capace di sostituire la suddetta impostazione non ha permesso finora di abbandonare queste logiche progettuali ormai considerate non più al passo con i tempi. Il problema tende ad assumere rilievo ancora maggiore se si fa riferimento alla rete stradale esistente, per il fatto che la Normativa vigente, pensata per le strade di nuova costruzione, risulta inefficace ed inapplicabile a garantire una progettazione sicura degli interventi sulla rete in esercizio.
L’insufficienza del sistema normativo comporta un rischio di inefficacia degli interventi di adeguamento realizzati per eliminare improprietà locali della geometria d’asse o della piattaforma, soprattutto quando sono attuati in modo isolato: in questi casi, infatti, vengono a determinarsi situazioni di insidia e di pericolo legate ad aspettative degli utenti che vanno ben al di là dell’offerta funzionale espressa dall’infrastruttura.
Inoltre, se gli interventi vengono concepiti a prescindere dalle condizioni al contorno, ed in particolare dalle condizioni di circolazione a monte e a valle delle tratte esaminate, c’è il rischio di incorrere nel cosiddetto problema della “migrazione dei punti neri” trasferendo così altrove la criticità.
In un contesto del genere di sicuro può assumere un ruolo determinante e di grande importanza la sperimentazione e l’analisi dei fenomeni legati alla circolazione attraverso il ricorso alla realtà virtuale ed ai simulatori di guida; queste tecniche, infatti, si stanno affermando sempre più negli ultimi anni grazie allo sviluppo di sistemi hardware e software sempre più potenti e, soprattutto, dimostrano grande adattabilità e polivalenza nei casi in cui le tradizionali tecniche sperimentali si dimostrano eccessivamente costose o del tutto impraticabili.
La loro affidabilità, ovviamente, è fortemente condizionata dalla capacità del sistema di ricostruire condizioni ed ambienti molto prossimi a quelli reali, in modo da determinare reazioni analoghe a quelle che il soggetto manifesterebbe nella realtà.
Da questo punto di vista, considerato lo sviluppo della tecnologia nell’ultimo decennio e considerato anche i simulatori già in uso presso i maggiori centri di ricerca, dove si
studiano le patologie della guida o si addestrano i conducenti all’esercizio viario, le garanzie offerte sono ampie.
I simulatori di guida garantiscono un ambiente di guida simulato totalmente sicuro e caratterizzato da un elevato controllo sperimentale, permettendo così un’elevata flessibilità nel tipo di sperimentazioni che si possono condurre ed evitando potenziali danni ai soggetti partecipanti. Molte variabili estranee che possono influenzare il comportamento dei guidatori possono essere controllate utilizzando il simulatore: è possibile replicare precisamente l’area oggetto di sperimentazione mantenendo solamente le variabili di interesse. In pratica, gli studi al simulatore consentono la manipolazione delle variabili indipendenti poichè permettono di mantenere costanti tutte le variabili estranee.
Inoltre, l’analisi della letteratura mostra come gli studi al simulatore sono generalmente più efficienti degli studi su strada in quanto richiedono un minor numero di partecipanti, come conseguenza dell’elevato controllo sperimentale, e perchè condizioni differenti possono essere implementate e sottoposte ai soggetti testati in un'unica sessione di guida.
In pratica è possibile effettuare esperimenti con misure ripetute su soggetti nelle stesse condizioni sperimentali: un ridotto numero di partecipanti, quindi, è sufficiente per ottenere lo stesso livello di potenza statistica che in esperimenti su strada richiederebbero un campione ben più numeroso.
Per quanto concerne i costi legati alla simulazione è apparso da subito evidente come questi risultano essere sicuramente minori rispetto alla realtà per cui l’utilizzo del simulatore per lo sviluppo di nuove tecnologie/dispositivi di tipo diverso può avvenire addirittura nella fase concettuale.
Il simulatore permette, inoltre, lo svolgimento dei test in condizioni ambientali controllate e ripetibili, eliminando delle condizioni di aleatorietà che potrebbero inficiare i risultati delle prove e che spesso si riscontrano per le prove eseguite sul campo. Infine, essendo installato all’interno di un laboratorio, l’impiego di un simulatore permette di agevolare il rilevamento e la registrazione dei dati necessari per le analisi.
BIBLIOGRAFIA
1. Ezra Hauer - Observational before--after studies in road safety: Estimating the
effect of highway and traffic engineering measures on road safety,
Pergamon (Oxford, OX, U.K. and Tarrytown, N.Y., U.S.A.) 1997.
2. R. Elvik, and T. Vaa, The handbook of road safety measures, Amsterdam: Elsevier, 2004.
3. M. Zuckerman, Dimension of sensation seeking, Journal of Consulting and Clinical Psychology, Vol 36(1), 45-52., February 1971.
4. M. Zuckerman, M. Behavioral expressions and biosocial bases of sensation
seeking. New York: Cambridge University Press, 1994.
5. J. A. Michon, A critical view of driver behavior models: What do we know, what
should we do?, Human behaviour and traffic safety, New York - London: Plenum
Press, 1985.
6. J.T. Reason, Human Error. Cambridge: Camebridge University Press, 1990.
7. T.Lajunen, D. Parker, H. Summala, The Manchester Driver Behaviour
Questionnaire: a cross-cultural study, Accident Analysis and Prevention, Volume
36, Issue 2, Pages 231-238, March 2004.
8. P. Pierantoni – B. M. Cecchini, Fenomeni di invarianza (omeostasi) del rischio
stradale e relative circostanze, Comitato Nazionale Italiano AIPCR - Comitato C3,
luglio 2009.
9. J.R. Wilson, A.Rutherford, Mental Models: Theory and Application in Human
Factors, Human Factors: The Journal of the Human Factors and Ergonomics
Society, Volume 31, Number 6, December 1989 , pp. 617-634 10. G.J.S. Wilde, Target risk. Toronto, PDE, 1994.
11. OECD. Behavioural adaptations to changes in the road transport system. Paris: OECD expert group, 1990.
12. H.Summala Accident Risk And Driver Behaviour, Safety Science, Vol. 22, No. l-3, pp. 103-I 17, 1996.