3 DESCRIZIONE ED ANALISI DEL PROBLEMA
3.1 Terminologia e principi fondamentali
In questo capitolo viene introdotta la nomenclatura delle principali parti che compongono una moderna imbarcazione a vela. Vengono poi descritti i principali rudimenti della conduzione di una imbarcazione ed infine viene fornita una breve introduzione dei principi di navigazione di una imbarcazione a vela. Per una più dettagliata descrizione dell’attrezzatura, dei tipi di scafo e dei metodi di conduzione si rimanda ad un classico testo divulgativo [38], adottato dalle più famose scuole di vela. Nel seguito è riportata solo una piccola parte di tale vasto argomento, considerata necessaria per una regolare lettura della tesi.
3.1.1 Terminologia fondamentale
Una barca a vela è un complesso sistema dinamico immerso in due fluidi in movimento relativo e l’interazione fra la parte emersa e la parte in acqua determina il comportamento generale dell’imbarcazione. E’ possibile considerare le barca a vela come un’interfaccia fra aria e acqua da cui deriva propulsione dalla prima e supporto dalla seconda.
Una prima possibile schematizzazione del sistema barca a vela consiste nel separare la parte interessata dall’aria e la parte interessata dall’acqua. La linea di galleggiamento divide, infatti, l’opera viva, parte immersa dell’imbarcazione, dall’opera morta, al di sopra della linea di galleggiamento, come mostrato nella fig. 3-1.
Fig. 3-1, Opera viva e opera morta di un’imbarcazione a vela
In fig. 3-2 è rappresentata una barca di piccole dimensioni armata di un solo albero.
Si distingue la classica configurazione della velatura Marconi in cui è presente un fiocco a prua, parte anteriore di una imbarcazione, e una randa a poppa, parte posteriore dell’imbarcazione.
In Fig. 3-3 sono mostrate le principali componenti di un’imbarcazione di medie dimensioni. La poppa termina quasi sempre con una tavola piatta perpendicolare all’asse longitudinale dell’imbarcazione che viene chiamata specchio di poppa. Le fiancate vengono definite, osservando da poppa a prua, come quella di sinistra e quella di dritta.
Fig. 3-3, Nomenclatura barca a vela di medie dimensioni
Il timone presente a poppa viene incernierato nello specchio di poppa e ha il compito di mantenere e di modificare la rotta, ossia di governare l’imbarcazione. Circa a metà scafo, sull’asse longitudinale della barca, si trova la deriva alloggiata in un apposito vano detto scassa della deriva. Per sfruttare il vento come mezzo propulsivo, la barca a vela possiede un albero al quale sono fissate le vele. Tale albero è appoggiato su un alloggiamento detto scassa dell’albero e la sua posizione è assicurata dalle manovre fisse costituite dalle sartie sui due lati, lo strallo a prua e, se presente, un’ulteriore strallo a poppa. Per ridurre lo sforzo sulle sartie e diminuire i movimenti dell’albero in senso laterale sono inoltre presenti le crocette.
La velatura è composta nel caso più frequente da due vele triangolari, il fiocco a proravia e la randa a poppavia dell’albero. Tramite la trozza è fissato perpendicolarmente all’albero un altro palo detto boma a cui è fissato la base della randa. Il movimento in senso verticale
orientate, in funzione della direzione del vento, mediante altre cime dette scotte. Le due vele triangolari hanno nomi di lati e di angoli uguali. Il lato verso prua si chiama caduta prodiera, il lato inferiore base e il lato verso poppa balumina. Nella balumina della randa sono inserite delle stecche per tenere la vela nella giusta forma. Nella caduta prodiera del fiocco è inserita la ralinga, un cavetto d’acciaio che a vela alzata si mette parallelo allo strallo.
L’angolo inferiore delle vele verso prua, che viene fissato alla base dello strallo per il fiocco e alla trozza per la randa, si chiama punto o angolo di mura. Quello verso poppa a cui nel caso del fiocco vengono assicurate le scotte, e nel caso della randa una cima detta tesabase, si chiama angolo di scotta. Infine l’angolo superiore delle vele, quello cioè a cui viene fissata la drizza per alzarle o ammainarle, si chiama angolo di penna o di drizza. La zona dove sta l’equipaggio prende il nome di pozzetto ed il timoniere governa la barra del timone eventualmente aiutato dallo stick che altro non è che una prolunga della barra stessa.
3.1.2 Fondamenti sulla conduzione
Su una barca a vela, rotte, posizioni e manovre sono sempre considerate in relazione al vento e in particolare alla sua direzione. Durante la navigazione, una volta individuata la direzione da cui proviene il vento sulla barca, si distingue tra un lato sopravvento e un lato sottovento.
Fig. 3-4, Lato sopravvento e lato sottovento
Come si può notare dalla fig. 3-4, il lato sopravvento è quello che viene investito per primo dal vento mentre quello sottovento è il lato dell’imbarcazione che si trova nella direzione verso la quale il vento prosegue il suo cammino.
In termini nautici modificare la rotta dell’imbarcazione viene denominato accostamento a dritta e accostamento a sinistra.
Per far ciò il timone deve essere spostato dalla parte opposta a quella in cui vogliamo accostare. In relazione al vento, la modifica della rotta assume particolari denominazioni: orzare e poggiare. Orziamo con la barca quando accostiamo verso il vento ossia quando avviciniamo la prua al punto da cui il vento soffia. Poggiamo, invece, quando accostiamo allargandoci dalla direzione del vento, ossia quando allontaniamo la prua dal vento.
Inoltre, poiché la barca può navigare investita dal vento su uno qualunque dei suoi lati, si dice che una barca naviga con mure a dritta quando il suo lato sopravvento è quello di dritta; viceversa si dice che naviga con mure a sinistra quando il suo lato sopravvento è quello di sinistra, ossia quando il vento investe il suo lato sinistro.
Fig. 3-6, Mure a dritta e a sinistra
Per sfruttare il vento come mezzo propulsore dobbiamo, a seconda della rotta, regolare le vele ovvero orientarle rispetto alla direzione del vento. Le scotte hanno tale compito. Se le scotte vengono tese cazziamo la vela, ovvero la avviciniamo all’asse longitudinale della imbarcazione; allentando la scotta laschiamo la vela e la forza del vento la allontana dall’asse longitudinale.
L’andatura di una barca a vela rappresenta l’angolazione che esiste tra la direzione lungo la quale l’imbarcazione procede e la direzione da cui proviene il vento.
La barca a vela non può navigare controvento e, più esattamente, in un intervallo di angoli che costituisce il cosiddetto settore di bordeggio. Come si può vedere dalla fig. 3-7, se dal settore di bordeggio poggiamo un poco fino a far gonfiare le vele, la barca naviga di bolina. Poggiando ancora fino a mettere la fiancata della barca perpendicolare alla direzione del vento, la barca naviga al traverso. Poggiando ancora abbiamo il lasco e il gran lasco ed, infine, quando il vento viene esattamente da poppa, l’andatura di poppa. Se da questa andatura continuiamo a virare si ha un cambiamento di mure, ossia le vele si spostano dall’altro lato. Da questo momento in poi quello che prima era poggiare diventa orzare e in senso inverso si hanno tutti settori descritti precedentemente.
La regolazione fondamentale delle vele consiste nel fatto che cambiando la propria rotta e passando quindi da un’andatura ad un’altra, occorre variare la posizione delle vele. In particolare se si orza occorre cazzare le vele come rappresentato in fig. 3-8, dove un’imbarcazione che dall’andatura di gran lasco con mure a sinistra passa ad una andatura di bolina sempre con mure a sinistra.
Fig. 3-8, Cazzare le vele
Viceversa, se si poggia, le vele devono essere lascate. In fig. 3-9 è rappresentata un’imbarcazione che passa da una andatura di bolina ad una di gran lasco senza cambiare le mure.
Fig. 3-9, Lascare le vele
Quando durante la navigazione si cambia il lato della barca investito dal vento, accompagnando quindi il cambiamento di andatura con una variazione delle mure, si effettua una virata. Si distingue in virata di prua e strambata a seconda che durante il cambio di mure il vento passi per la prua o per la poppa della barca.
In fig. 3-10 è rappresentata una tipica virata di prua in cui l’imbarcazione inizialmente si trova in bolina con le mure a sinistra e la sua rotta prevede di arrivare sulla costa nel punto indicato. Per far ciò è costretta ancora ad andare di bolina ma con le mure a dritta. E’ da notare che la barca è costretta ad superare il settore di bordeggio e per far ciò deve avere un’energia cinetica rimasta per inerzia (abbrivio) per superare la zona in cui le vele non hanno forza propulsiva.
Fig. 3-10, Virata di prua
La virata di prua in dettaglio è descritta nella fig. 3-11 e si compone dei seguenti passi fondamentali:
• Si porta il timone all’orza iniziando in questo modo la virata
• La barca entra nel settore di bordeggio e contemporaneamente si lasca la scotta del fiocco
• Mentre cambia il lato della barca su cui batte il vento, le vele passano dalla mezzeria della barca e si portano sul nuovo lato sottovento
• Si cazza nuovamente la scotta opposta del fiocco e si riporta il timone al centro • La barca riparte nuovamente sulle nove mure
Nella strambata, come già accennato, si ha il cambio di mure con il vento in poppa. In questo caso quindi la barca ha sempre una buona velocità e la randa continua a portare per tutta la manovra. Quando il vento passa dalla poppa della barca, il boma e la randa passano da un lato all’altro e ciò prende il nome di strambata.
La strambata in dettaglio è descritta nella fig. 3-12
Fig. 3-12, Strambata in dettaglio
e si compone dei seguenti passi fondamentali:
• Il timoniere poggia sino a portarsi nell’andatura con il vento esattamente in poppa, detta anche fil di ruota
• In tali condizioni il fiocco si trova sventato dalla randa e può essere fatto passare dall’altro lato della barca. In tal modo si dice che le vele sono disposte a farfalla
• Si recupera la scotta della randa sino a portare il boma al centro della barca. Tale operazione non è strettamente necessaria, ma è utile poiché il passaggio libero del boma sul pozzetto è tipicamente pericoloso e la fonte più comune di incidenti nella pratica
• Si continua nella orzata e si fa così in modo che la randa prenda il vento dalla parte opposta e a questo punto si può lascare la scotta della randa
• Si riporta il timone al centro eventualmente correggendo la tendenza della barca di andare all’orza sulle nuove mure
3.1.3 Piani Velici
Per piano velico si intende l’insieme delle vele che un’imbarcazione utilizza in relazione all’andatura, alle condizioni di vento e del mare. Le vele possono essere classificate in tre categorie a seconda del modo in cui sono inferite:
• Vele di strallo
• Vele inferite su antenne • Vele a inferitura libera
Alla prima categoria appartengono le vele cosiddette di prua, ossia i vari tipi di fiocco e le vele di strallo nelle imbarcazioni a due alberi. Nelle barche da regata sono presenti una serie di vele di strallo ognuna adatta alla particolare condizione climatica. Per quanto riguarda la serie dei fiocchi si va da quello di superficie massima (solitamente genoa n°1) alla tormentina, più piccola ma più resistente adatta a condizioni di vento forte. Il criterio di scelta fra le varie tipologie di fiocco si basa sulla necessità di ridurre la forza sbandante che aumenta all’aumentare della velocità del vento senza però penalizzare eccessivamente la diminuzione simultanea della forza propulsiva.
Nelle vele inferite su antenne, la tipologia maggiormente usata attualmente è la randa bermudiana o di Marconi che ha una forma essenzialmente triangolare con il lato di inferitura lungo e la base più corta. Sono relativamente facili da usare essendo necessaria solamente una drizza per ammainarle ed alzarle. Spesso sono inserite delle stecche che impongono alla vela un certo allunamento per migliorare l’efficienza aerodinamica. In fig. 3-14 è rappresentata una imbarcazione con una tipica configurazione di una randa bermudiana e fiocco.
Figura 3-14, Imbarcazione con randa e fiocco
Nella categoria delle vele a inferitura libera appartengono gli spinnaker, i gennaker e i blooper. Lo spinnaker, che è la più diffusa, ha forma sferica con grande concavità allo scopo di offrire la massima resistenza al vento tramutandola quindi in forza propulsiva.
3.1.4 Tipi di scafo
Una classificazione sistematica delle diverse tipologie di scafo è praticamente impossibile per la vasta quantità di forme e soluzioni costruttive presenti oggi sul mercato. Una possibile prima classificazione può essere quella di dividere gli scafi in due grandi categorie
• Scafi a deriva fissa • Scafi a deriva mobile
In ogni caso la funzione delle appendici immerse è quella di generare una forza laterale che impedisca il più possibile alla barca di spostarsi lateralmente rispetto all’acqua, conferendo equilibrio direzionale e consentendo il giusto assetto.
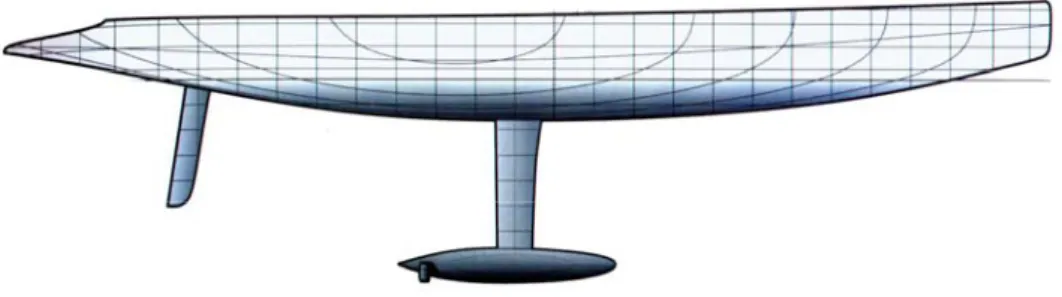
La deriva fissa, di cui un esempio è raffigurato nella Fig. 3-16, è utilizzata nella maggior parte delle barche da regata e nelle barche da crociera con lunghezza superiore a 5-6 metri.
Figura 3-16, Imbarcazione da regata con deriva fissa
In questo caso la deriva è parte integrante dello scafo e nella parte più bassa è applicato un peso con lo scopo di produrre la necessaria stabilità quando la barca sbanda.
Fig. 3-17, Scafo dotato di deriva mobile
3.1.5 Il movimento della barca
Un’imbarcazione può essere vista come un sistema fisico, composto da più componenti strettamente interconnesse, che interagisce contemporaneamente con due fluidi attraverso le forze del vento e del mare. Quindi solamente attraverso l’interconnessione dei vari sottosistemi è possibile descriverne il comportamento generale.
Come illustrato in Fig. 3-18, il sistema barca a vela ha come ingressi le manovre compiute dall’equipaggio, in termini di regolazione delle vele e comandi a cui è sottoposto il timone, e ingressi dovuti agli agenti ambientali in cui l’imbarcazione si trova in ogni istante. L’uscita del sistema sono le accelerazioni, le velocità e le posizioni in cui la barca si trova.
Fig. 3-18, Imbarcazione vista come sistema fisico con ingressi e uscite
La barca che naviga nel mare è soggetta a una grande varietà di movimenti dovuti alla combinazione dell’azione di numerose forze di varia origine, aerodinamiche, idrodinamiche, gravitazionali, di inerzia e di galleggiamento. Il comportamento dell’imbarcazione può essere interpretato attraverso l’equilibrio che si viene ad instaurare
Per descrivere il movimento dell’imbarcazione, è fondamentale distinguere se stiamo considerando le condizioni di regime o le condizioni transitorie.
In condizioni di regime si presuppone che il vento sia costante e che la barca navighi in assenza di moto ondoso. Si assume un assetto costante e in particolare le velocità, sia in modulo che in direzione, sono costanti e non sono previste cambiamenti di rotta essendo l’angolo del timone costante nel tempo. Nelle equazioni non compare il tempo né compaiono le azioni di inerzia. Molti software di predizione delle performance si basano su queste ipotesi risolvendo il problema su vari punti di equilibrio, imponendo quindi iterativamente la risoluzione di un sistema di equazioni algebriche che rappresentano le condizioni di equilibrio sotto l’effetto delle forze applicate.
Nello studio del movimento durante il transitorio, l’imbarcazione è soggetta ad accelerazioni in conseguenza alle variazioni del mare, vento e del timone. Compaiono forze e coppie di inerzia che devono essere incluse nell’equazioni di equilibrio dinamico. Inoltre il tempo compare esplicitamente nelle equazioni.
Come già detto, una barca a vela si trova ad interagire con due fluidi contemporaneamente, acqua e aria, e l’equilibrio dei due sistemi di forze determina il comportamento dell’imbarcazione. In particolare la sua velocità, l’angolo di sbandamento e in generale l’assetto della barca costituiscono l’ago di una bilancia in cui si contrappongono forze idrodinamiche e forze aerodinamiche
Un corpo fisico che si muove in linea retta a velocità costante è detta in equilibrio e in questa condizione tutte le forze che agiscono in ogni direzione o i momenti attorno ad ogni asse hanno una risultante nulla. Il bilanciamento delle forze è ben illustrato in fig. 3-19 dove le forze sono rappresentate attraverso vettori la cui direzione indica la direzione della forza mentre la lunghezza è proporzionale all’intensità.
Nello studio delle forze causate dal movimento di fluidi è usuale definire come resistenza la forza che agisce lungo la linea di movimento del fluido e come portanza la forza che agisce nella direzione perpendicolare al movimento del fluido. Per non fare confusione tra le componenti delle forze aerodinamiche e idrodinamiche, nel proseguo si farà riferimento a portanza e resistenza aerodinamica per quanto riguarda le forze generate dall’aria mentre le corrispondenti forze idrodinamiche verranno denominate resistenza e forza laterale idrodinamica. Per semplice somma vettoriale, il vettore rappresentativo della resistenza idrodinamica si combina con il vettore di forza laterale idrodinamica formando il vettore della forza idrodinamica totale. Analogamente si ha il vettore della forza aerodinamica totale.
Per effetto del movimento dell’imbarcazione bisogna distinguere tra vento reale che è quello che si misura da un punto fisso e vento apparente che è quello cui è soggetta l’imbarcazione in movimento. La velocità del vento può essere rappresentata mediante vettori lineari, il cui orientamento rappresenta la direzione da ci spira il vento e la cui lunghezza esprime la velocità. Quando una barca naviga nelle andature strette, come mostrato in figura, il vento apparente è maggiore rispetto al vento reale. Il requisito per un movimento a regime è quindi che la forza aerodinamica totale sia uguale in intensità e opposta in direzione alla forza idrodinamica totale. Sono presenti naturalmente ulteriori forze verticali generate dal movimento dell’imbarcazione, specialmente in condizioni di sbandamento, ma il bilanciamento di tali forze è dominato dal peso dell’imbarcazione e dalla forza di galleggiamento e non hanno quindi un ruolo significativo nel determinare le performance generali dell’imbarcazione.
Fra l’asse dello scafo dell’imbarcazione e la direzione dell’effettiva rotta è presente un angolo che viene chiamato di scarroccio. Tale angolo nasce dal fatto che la forza idrodinamica laterale viene generata dalla deriva e per far ciò deve essere presente un angolo di attacco con cui la deriva è investita dall’acqua che avanza.
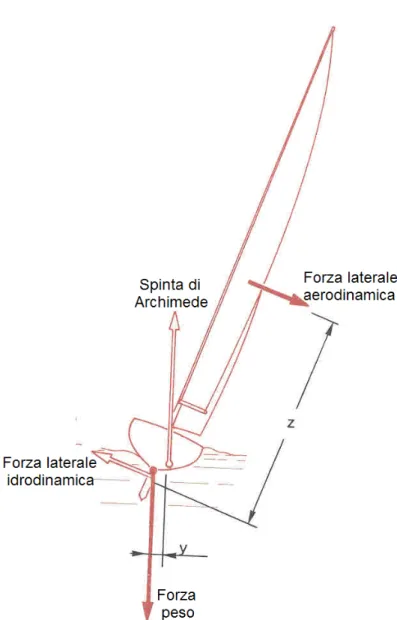
Il bilanciamento dei momenti è mostrato nella fig. 3-20 dove le componenti della forza idrodinamica e aerodinamica normali all’asse di simmetria dello scafo sono rappresentate da delle frecce. Se dal bilanciamento delle forze esse hanno la stessa intensità ma in direzioni opposte, esse non hanno la stessa linea di applicazione e creano quindi un momento ruotante che causa una rotazione dell’imbarcazione fino a che non viene raggiunto un angolo di sbandamento al quale questo momento è bilanciato dal momento raddrizzante dello scafo, dalla posizione della deriva e dal peso dell’equipaggio.
In particolare la forza laterale aerodinamica provoca un momento sbandante che viene controbilanciato dal momento creato dalla forza laterale idrodinamica. A tale condizione si aggiunge il momento raddrizzante generato dallo scafo: infatti in una condizione di imbarcazione sbandata, la retta di applicazione della forza peso e della spinta di Archimede non coincidono più sul piano longitudinale della barca e si ha un ulteriore creazione di un momento la cui entità dipende dalla forma dello scafo che si oppone ai momenti generati dalle forze aerodinamiche e idrodinamiche. Ciò provoca il raggiungimento di una nuova condizione di equilibrio che impone una navigazione sbandata all’imbarcazione.
Un’ulteriore condizione dinamica di equilibrio si viene a creare quando la barca sta virando. La forza che il timone produce quando si impone un cambiamento di rotta genera lo spostamento di una massa d’acqua proporzionale all’angolo del timone, alla sua area e alla velocità con cui la barca sta avanzando. Tale forza genera un notevole momento rotatorio a causa della distanza a cui il timone è posto rispetto al centro di gravità dell’imbarcazione. A tale momento si oppongono tuttavia una serie di altri momenti generati dalla deriva e dallo scafo che, insieme all’inerzia dell’imbarcazione, descrivono l’andamento della virata a cui l’imbarcazione stata sottoposta.
Fig. 3-20, Bilanciamento dei momenti (equilibrio laterale)
3.2 Sistemi di riferimento
La postura di un corpo libero nello spazio è definita da 6 parametri (Gradi di Libertà - DOF). Per descrivere il movimento di questi corpi vengono utilizzati due sistemi di riferimento:
• un sistema di riferimento fisso (Earth frame)
• un sistema di riferimento mobile (Body frame) solidale all’oggetto in movimento.
Nella modellazione della cinematica di imbarcazioni, gli assi del sistema di riferimento mobile X Y Z coincidono con gli assi principali di inerzia e tipicamente la loro origine
Fig. 3-21, Sistema d riferimento fisso e sistema di riferimento mobile in applicazioni marine
Come indicato in fig. 3-21 gli assi sono abitualmente definiti come:
• X - asse longitudinale diretto da poppa a prua O
• Y - asse trasversale diretto dalla fiancata di sinistra a quella di dritta O
• Z - asse normale diretto dall’alto in basso O
Il movimento del sistema di riferimento mobile è descritto in relazione ad un sistema di riferimento non inerziale. A causa della limitata velocità dei sistemi marini è possibile considerare il campo di gravità terrestre uniforme e quindi considerare il sistema di riferimento fisso non inerziale. E’ quindi possibile descrivere la posizione e l’orientazione del sistema in relazione al sistema di riferimento fisso mentre le velocità lineari e quelle angolari in relazione al sistema di riferimento mobile. Si definiscono quindi i 6 gradi di libertà come:
• Avanzamento, definito come spostamento lineare in direzione dell’asse X (surge) 0
• Spostamento, laterale come spostamento lineare in direzione dell’asse Y (sway) 0
• Sussulto come, spostamento lineare in direzione dell’asse Z (heave) 0
• Rollio definito, come rotazione attorno all’asse X (roll) 0
• Beccheggio, definito come rotazione attorno all’asse Y (pitch) 0
• Imbardata o serpeggio, definito come rotazione attorno all’asse Z (yaw) 0
I gradi di libertà sono mostrati nella seguente fig. 3-22 dove sono indicati i movimenti con dicitura anglosassone
Fig. 3-22, Sistema di riferimento mobile solidale all'imbarcazione
o in modo più schematico:
Fig. 3-23, Sistema schematico di riferimento solidale alla barca
Di seguito utilizzeremo una nomenclatura specifica dei veicoli marini per identificare le variabili di movimento rispetto a detti assi. In accordo con lo standard proposto da “The
Society of Naval Architects and Marine Engineers” (SNAME), posizioni, orientazioni e
velocità hanno una nomenclatura ben precisa e presente nella tabella 3-1 per quanto riguarda il sistema di riferimento mobile e in tabella 3-2 per quanto riguarda il sistema di riferimento fisso.
Forze e momenti Vel. lineare e angolare (relative)
Traslazione in direzione X 0 X u
Traslazione in direzione Y 0 Y v
Traslazione in direzione Z 0 Z w
Rotazione intorno all’asse X 0 K p
Posizioni e angoli di Eulero (assolute) Traslazione in direzione X x
Traslazione in direzione Y y
Traslazione in direzione Z z
Rotazione intorno all’asse X φ
Rotazione intorno all’asse Y ϑ
Rotazione intorno all’asse Z ψ
Tabella 3-2, Nomenclatura dei gradi di libertà nel sistema di riferimento fisso
Nella tabella 3-1 sono stati inseriti inoltre le forze e i momenti che agiscono sulla barca rispetto al sistema solidale alla barca stessa. Partendo da queste notazioni, il movimento dell’imbarcazione può essere descritto tramite i seguenti vettori:
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = z y x 1 η , ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = ψ ϑ φ η2 , ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 2 1 η η η .
per quanto riguarda posizione e orientazione nel sistema di riferimento fisso.
Le velocità lineari e angolari nel sistema di riferimento mobile sono espresse dai vettori
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = w v u 1 υ , ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = r q p 2 υ , ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = 2 1 υ υ υ .
Nei sistemi marini l’orientazione è tipicamente rappresentata tramite gli angoli di Eulero. Tramite tali angoli è possibile determinare matrici di rotazione necessarie per passare dal sistema di riferimento mobile a quello fisso. In particolare si introducono le seguenti matrici di rotazione ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = φ φ φ φ φ cos sin 0 sin cos 0 0 0 1 , x R ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = ϑ ϑ ϑ ϑ ϑ cos 0 sin 0 1 0 sin 0 cos , y R ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = 1 0 0 0 cos sin 0 sin cos , ψ ψ ψ ψ ψ z R
Componendo tali rotazioni, nell’ordine RPY definito in [32], si ottiene
( )
T x T y T z R R R J1η2 = ,ψ ,ϑ ,ψ da cui( )
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − + − + + + − = φ ϑ φ ϑ ϑ ϑ φ ψ φ ψ φ ϑ ψ φ ψ ϑ ψ ϑ φ ψ φ ψ φ ϑ ψ φ ψ ϑ ψ η cos cos sin cos sin sin cos sin sin cos sin sin sin cos cos cos sin sin cos cos sin sin sin sin cos cos sin cos cos 2 1 Jdove J1 e la matrice di rotazione dal sistema mobile al sistema fisso per cui risulta
possibile scrivere la relazione tra velocità relative e velocità assolute come:
( )
2 11
1 η ν
η& = J ⋅
L’orientazione del sistema di riferimento mobile è data da
( )
2 2 1 2 , , , 2 0 0 0 0 0 0 η υ ψ θ φ υ φ φ ϑ = ⋅ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ + ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ = − J R R Rx x y & & & da cui( )
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − = φ ϑ φ ϑ φ φ ϑ φ ϑ φ η cos cos sin cos 0 sin cos 0 tan cos tan sin 1 2 2 JPertanto il vettore delle velocità angolari ν relative al sistema di riferimento mobile e la 2
derivata degli angoli di eulero η sono correlati mediante la matrice di trasformazione 2
( )
2 2 η J secondo( )
2 2 2 2 η υ η& = J ⋅E’ pertanto possibile rappresentare η in funzione di υ tramite la matrice:
( )
( )
υ( )
η υ υ η η η η η ⎥= ⋅ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ Ο Ο = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = × × J J J 2 1 2 2 3 3 3 3 2 1 2 1 & & & (2) (1) (3)3.3 Equazioni del moto
Dal punto di vista dell’equilibrio dinamico, essendo l’imbarcazione modellata con 6 gradi di libertà, occorrono altrettante equazioni di equilibrio. Tali equazioni sono state ricavate [31] utilizzando le equazioni di Kirchhoff per il movimento o il cosiddetto approccio
quasi-Lagrangiano. La dinamica del sistema è descritta in termini energetici e partendo
dalla lagrangiana
V T L= − è possibile determinare tali equazioni come
( )
1 1 2 1 1 2 1 τ η η ν υ ν ∂ = ∂ − ∂ ∂ × + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ L J L L dt d T( )
2 2 2 2 1 1 2 2 2 τ η η ν υ ν υ ν ∂ = ∂ − ∂ ∂ × + ∂ ∂ × + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ∂ ∂ L J L L L dt d TUtilizzando il primo e il secondo assioma di Eulero è possibile determinare l’equazioni di moto di un corpo rigido. Con riferimento alla fig. 3-24, si considera un sistema di coordinate XOYOZO solidale con un corpo che ruota con una velocità angolare ω intorno al sistema di coordinate fisso XYZ . Si definiscono le seguenti grandezze:
•
[
]
TO X Y Z
f =τ1 = , , , forze esterne
•
[
]
TO K M N
m =τ2 = , , , momenti delle forze esterne rispetto ad O
•
[
]
T O =υ1= u v w υ , velocità lineari di XOYOZO •[
]
T r q p = =υ2 ω , velocità angolari di XOYOZO •[
]
T G G G G x y z r = , centro di gravitàIl tensore di inerzia I riferito ad un generico sistema di coordinate O XOYOZO con origine O nel sistema di coordinate mobile è definito come:
⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − − = z zy zx yz y yx xz xy x O I I I I I I I I I I ˆ
dove Ix,Iy,Izsono i momenti di inerzia relativi agli assi X ,O YOe Z mentre O Ixy =Iyx, zx
xz I
I = e Iyz =Izy sono i momenti di inerzia centrifughi. In [32] è presente la derivazione delle equazioni di moto considerando le seguenti ipotesi semplificative:
• L’imbarcazione è considerata un corpo rigido • Il sistema di riferimento fisso è inerziale
Grazie a tali semplificazioni è possibile non considerare le forze fra gli elementi singoli che compongono l’intera struttura e eliminare le forze dovute al movimento relativo della Terra rispetto ad un riferimento inerziale. Mediante semplici considerazioni di meccanica è possibile determinare
(
)
(
vO O rG rG)
fOm ˆ +ω×υ +ωˆ× +ω× ω× =
e se l’origine del sistema di riferimento solidale al corpo è scelto coincidente con il centro di gravità dell’oggetto è possibile scrivere:
(
O C)
fCmυˆ +ω×υ =
dove fO = fC e υO =υC.
Analogamente sono stati derivati i contributi per il moto rotazionale che risultano pari a
(
O)
G(
O O)
OO I mr m
I ωˆ+ω ω + × υˆ +ω×υ =
e se l’origine del sistema di riferimento solidale al corpo è scelto coincidente con il centro di gravità dell’oggetto è possibile scrivere:
( )
C CC I m
I ωˆ+ω× ω =
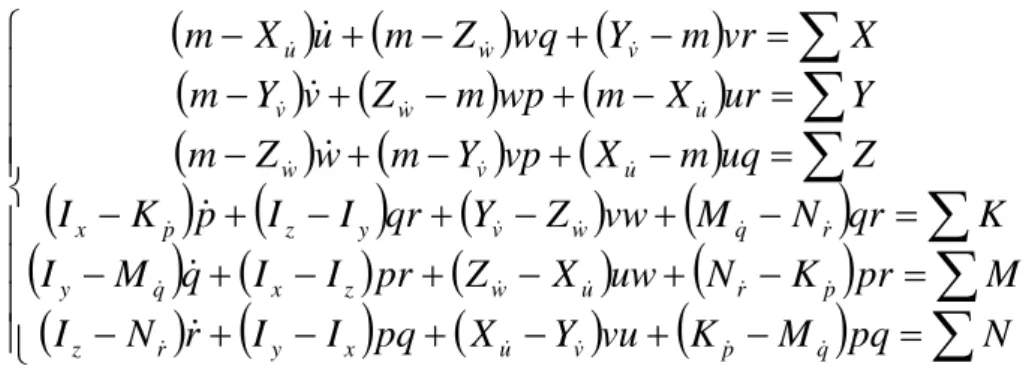
Quindi sono state considerate sei equazioni in cui tre rappresentano l’equilibrio alla traslazione secondo gli assi X, Y e Z e tre equazioni di equilibrio dei momenti attorno ai medesimi assi che garantiscono l’equilibrio alla rotazione. Le equazioni di moto di un generico corpo rigido in movimento possono essere espresse da:
(
)
(
)
(
)
[
]
(
)
(
)
(
)
[
]
(
)
(
)
(
)
[
]
(
)
(
)
(
)
(
)
[
(
)
(
)
]
(
)
(
)
(
)
(
)
[
(
)
(
)
]
(
)
(
)
(
)
(
)
[
(
)
(
)
]
⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ = + − − + − + − + − + + − − + = + − − + − + − + − + + − − + = + − − + − + − + − + + − − + = + + − + + − + − = + + − + + − + − = + + − + + − + − N wq vr u y ur wp v x m I p rq I p q I rp q pq I I p I M vp uq w x wq vr u z m I r qp I r p I qr p rp I I q I K ur wp v z vp uq w y m I q pr I q r I pq r qr I I p I Z p rq y q rp x q p z vp uq w m Y r qp x p qr z p r y ur wp v m X q pr z r pq y r q x wq vr u m G G zx yz yz x y z G G yz zx xy z x y G G xy yz xz y z x G G G G G G G G G & & & & & & & & & & & & & & & & & & & & & & & & 2 2 2 2 2 2 2 2 2 2 2 2e in forma più compatta
( )
CRCR CR C
M υ&+ υυ =τ
dove MCR è la matrice di inerzia del corpo rigido, CCR
( )
v e la matrice di Coriolis del corpo rigido e il vettore⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = N M K Z Y X CR τ
rappresenta le forze e i momenti esterni.
3.4 Estensione del modello
Considerando un generico sistema marino, le forze e i momenti idrodinamici possono essere considerati come la somma di tre componenti:
• Forze di inerzia relativi agli attriti e al movimento del fluido circostante • Forze viscose dovuto all’energia dispersa per generare onde di superficie • Forze gravitazionali e spinta di Archimede
Utilizzando l’analisi della dinamica di un sistema marino condotta da Fossen in [32] è possibile combinare i precedenti contributi in un unica espressione, e esprimere l’intera dinamica di un’imbarcazione come:
( )
υν( )
υυ( )
η τυ+C +D +g =
dove il nuovo modello include una matrice di massa
A CR M
M
M = +
compatibile coi fattori fisici dell’imbarcazione (MCR) aumentati di una massa (MA), Similmente per le forze di Coriolis sarà:
( )
ν CCR( )
υ CA( )
υC = +
include la matrice dei contributi di Coriolis e centripeti di un corpo rigido CCR
( )
υ e delle masse aggiunte CA( )
υ , e D( )
υ i contributi relativi alle forze di tipo viscoso.In prima approssimazione il concetto di “massa aggiunta” può essere associato a una quantità finita di acqua che va ad aggiungersi alla massa propria dell’imbarcazione formando un nuovo sistema con una massa maggiore del sistema originale. Il calcolo di tale contributo non è immediato sia da un punto di vista teorico che mediante esperimenti, ma considerando lo scopo del nostro modello e supportati da numerosi riscontri scientifici [25,55,67], notevoli semplificazioni possono essere effettuate. In particolare, considerando gli assi di simmetria dello scafo di una barca a vela e la predominanza diagonale forte della matrice delle masse aggiunte MA, possono essere trascurati elementi non presenti sulla diagonale e si ha quindi
{
u v w p q r}
A diag X Y Z K M N
M =− &, &, &, &, &, &
mentre la matrice CA assume la forma
( )
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − − − − − − − − = 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 p K q M u X v Y p K r N u X w Z q M r N v Y w Z u X v Y u X w Z v Y w Z C p q u v p r u w q r v w u v u w v w A & & & & & & & & & & & & & & & & & & υKeuning e Vermeulen [54] hanno presentato un metodo di approssimazione per una generica sezione bidimensionale. Lo strumento matematico utilizzato in questi esperimenti è stato la strip theory che prevede una iniziale suddivisione dello scafo in 20-30 sezioni per poi calcolarne i coefficienti idrodinamici bidimensionali, e successivamente un’integrazione su tutta la lunghezza dello scafo per risolvere il problema tridimensionale.
( )
x(
c( )
x c( )
x)
dx h Y Lwl Lwl yz yz v∫
− + − = 2 2 2 2 39 . 1 05 . 3 33 . 3 2ρ ϕ π &dove cyz
( )
x è il coefficiente di superficie della sezione e hϕ( )
x è la massima larghezza per ogni sezione in regime di sbandamento. Includendo anche i termini di masse aggiunte del timone e della deriva si può considerare1 2 2 _ + = k k k chiglia v ae s b Y& ρπ e 1 2 2 _ + = r r r timone v ae s b Y& ρπ
Moltiplicando la massa aggiunta di ogni sezione per la sua distanza dal centro di gravità si ottiene il momento di inerzia aggiunto in yaw
( )
x(
c( )
x c( )
x)
dx h x N Lwl Lwl yz yz r∫
− + − = 2 2 2 2 2 39 . 1 05 . 3 33 . 3 2 ρ ϕ π &e il contributo del timone e della deriva diventa
2 _ 2 _ _kr v chiglia k v timone r r Y l Y l
N& = & + &
La massa aggiunta in surge è approssimata da una semplice formulazione valida per navi commerciali e vale
m Loa
Tc Xu& =2
Le precedenti formule presuppongono però una precisa conoscenza dei piani di costruzione dell’imbarcazione, quindi un’ulteriore semplificazione può essere fatta considerando lo scafo come un semicilindro con dimensioni definite dalle caratteristiche geometriche principali dell’imbarcazione. Considerando la massa aggiunta di un semicilindro pari a
( )
x Ddove D
( )
x =D è il raggio del cilindro, può essere usato il seguente set di formule per il calcolo delle masse aggiunte( )
x dx D L D Y M L L v A 2 2 2 2 2 1 2 1 22 =− =∫
ρπ = ρπ − &( )
(
2 2 3)
2 2 2 2 2 2 2 1 . 0 24 1 2 1 1 . 0 2 1 66 dy x D x dx mB D L B m y N M L L B B r A =− =∫
+∫
ρπ = +ρπ − − & e poi( )
∫
− = − = 2 2 ) 2 ( 11 , 11 L L D u A X A y x dx M &( )
∫
− = − = 2 2 ) 2 ( 33 , 33 L L D w A Z A y x dx M &( )
∫
− = − = 2 2 ) 2 ( 44 , 44 L L D p A K A y x dx M &( )
∫
− = − = 2 2 ) 2 ( 55 , 55 L L D q A M A y x dx M & Dove( )
∫
( )
∫
( )
∫
− − − + = 2 2 2 2 2 2 2 2 , , ˆ , (2 ) 22 ) 2 ( 33 ) 2 ( 44 H H A B B A L L A y z dx y M x z dy z M x y dz M D D D( )
∫
( )
∫
( )
∫
− − − + = 2 2 2 2 2 2 2 2 , , ˆ , (2 ) 11 ) 2 ( 33 ) 2 ( 55 H H A L L A L L A y z dx x M y z dx z M x y dz M D D D( )
∫
( )
∫
( )
∫
− − − + = 2 2 2 2 2 2 2 2 , , ˆ , (2 ) 22 ) 2 ( 11 ) 2 ( 66 L L A B B A L L A y z dx y M x z dy x M y z dx M D D DConsiderando il centro del sistema di riferimento coincidente con il centro di gravità è la matrice di inerzia diagonale, il sistema assume la forma seguente in cui si sono indicati i contributi di forze e momenti esterni
(
) (
)
(
)
(
) (
)
(
)
(
) (
)
(
)
(
) (
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
⎪ ⎪ ⎪ ⎪ ⎩ ⎪⎪ ⎪ ⎪ ⎨ ⎧ = − + − + − + − = − + − + − + − = − + − + − + − = − + − + − = − + − + − = − + − + −∑
∑
∑
∑
∑
∑
N pq M K vu Y X pq I I r N I M pr K N uw X Z pr I I q M I K qr N M vw Z Y qr I I p K I Z uq m X vp Y m w Z m Y ur X m wp m Z v Y m X vr m Y wq Z m u X m q p v u x y r z p r u w z x q y r q w v y z p x u v w u w v v w u & & & & & & & & & & & & & & & & & & & & & & & & & & & & & &3.5 Analisi delle forze in gioco
Una barca a vela si trova ad interagire con due fluidi contemporaneamente, acqua e aria, e l’equilibrio dei due sistemi di forze determina il comportamento dell’imbarcazione. In particolare la sua velocità, l’angolo di sbandamento e in generale l’assetto della barca costituiscono l’ago di una bilancia in cui si contrappongono forze idrodinamiche e forze aerodinamiche.
Considerando la barca come un punto materiale e il movimento della stessa solo su un piano orizzontale, la fig. 3-25 descrive la situazione di equilibrio in cui l’imbarcazione si trova mentre naviga. La variazione della quantità di moto del vento reale corrisponde alla generazione di una forza aerodinamica FA.
Grazie alla teoria delle sezioni alari applicata alle vele è possibile determinare una componente di portanza aerodinamica PA, perpendicolare alla direzione da cui proviene il vento apparente (di intensità VAW e di direzione βAW), e una componente di resistenza aerodinamica RA parallela a tale direzione.
Come schematizzato in fig. 3-26, la forza aerodinamica FA non contribuisce interamente alla propulsione della barca, infatti proiettando tale forza nella direzione di avanzamento della barca si ottiene la forza motriceFMma anche una forza nella direzione perpendicolare alla direzione del moto che viene chiamata forza sbandante, FH.
Fig. 3-26, Forza motrice e forza sbandante derivanti dalla forza aerodinamica
Gli effetti della forza sbandante FH sono molteplici:
• Una spinta trasversale dell’imbarcazione nella direzione sottovento
• Un momento di rollio (causato dal fatto che il punto di applicazione della risultante delle forze aerodinamiche è tipicamente posto al di sopra del baricentro)
• La barca non naviga nella direzione del proprio asse longitudinale ma in una direzione leggermente inclinata sottovento. L’angolo fra l’asse longitudinale e l’effettiva rotta che la barca percorre è l’angolo di scarroccio λ (leeway angle con dicitura anglosassone)
Fig. 3-27, Punto di applicazione delle forze aerodinamiche
In assenza di correnti di deriva, sotto la linea di galleggiamento la deriva, il timone e lo scafo svolgono un ruolo analogo a quello delle vele: si trovano infatti investiti da un flusso inclinato di λ rispetto al piano di X e si comportano come se fossero ali. La superficie 0
notevolmente inferiore viene compensata dalla diversità di peso specifico e viscosità dell’acqua. Il risultato dell’interazione fra acqua e appendici di carena è la nascita di una forza idrodinamica FI anch’essa composta da una componente in direzione della velocità della barca, detta resistenza idrodinamica, e una componente perpendicolare detta portanza idrodinamica PI.
In condizione di regime la forza idrodinamica dovrà essere bilanciata da quella aerodinamica (vedi fig. 3-28) ossia in forma vettoriale dovrà essere:
I A F
Fr = r
E, scomponendo in equazioni scalari lungo le direzioni di avanzamento dell’imbarcazione e la sua perpendicolare, avremo le condizione di regime dell’imbarcazione:
⎩ ⎨ ⎧ = = I H I M P F R F o in modo grafico:
Fig. 3-29, Schematizzazione delle condizione di regime dell'imbarcazione
Un sommario delle forze in gioco, le condizioni di equilibrio e le principali variabili associate sono presenti nella seguente tabella:
Variabile Condizione Principali forze
interessate
S
V , velocità della barca
∑
FX =0 Forze di resistenza idrodinamica e forza propulsive aerodinamica λ, angolo di scarroccio∑
FY =0 Forza aerodinamicasbandante e portanza idrodinamica Linea di galleggiamento
∑
=0 Z F Forze verticali (gravitazionali e galleggiamento) ϕ, angolo di∑
=0 X M Momenti di sbandamento eϑ, angolo di beccheggio 0
∑
MY = Movimento di beccheggio da compensare δ , angolo del timone∑
MZ =0 Movimento di serpeggioda compensare
tab. 3-2, Gradi di libertà e forze relative
3.5.1 Forze gravitazionali e di Galleggiamento
La statica di un’imbarcazione studia le condizioni di equilibrio che la barca assume per effetto delle forze costanti a cui è soggetta. Lo studio della statica di un’imbarcazione è argomento analizzato in numerosi libri come ad esempio [66]. Una barca a vela che galleggia in acque calme si trova ad interagire con il campo gravitazionale da un lato e con le forze che l’acqua trasmette verso l’alto dall’altro. L’andamento di queste ultime è regolato dalla ben nota spinta di Archimede secondo la quale un corpo immerso in un liquido riceve una spinta dal basso verso l’alto pari al peso del liquido che sposta. In condizioni di equilibrio il peso del volume dell’acqua spostata dalla parte immersa dell’imbarcazione eguaglia esattamente il peso dell’imbarcazione stessa. Il peso del volume di acqua spostato dalla parte immersa dell’imbarcazione prende il nome di dislocamento ∆ .
La forza di gravità vale
g m ZGravitazionale = ⋅
dove mè la massa dell’imbarcazione, mentre la forza di galleggiamento vale
g ZGalleggiamento =ρ⋅∇⋅
dove ∇ è il volume della carena che rappresenta il volume di acqua spostato espresso in ]
[m3 e ρ è il peso specifico dell’acqua espresso in [N m3]. E’ da notare che la forza di Archimede è in realtà la risultante delle azioni di pressione che agiscono in modo distribuito su tutta la parte immersa della carena e solamente per ragioni di simmetria e in condizioni di equilibrio, tale risultante ammette solo una componente verticale.
In condizione di equilibrio al galleggiamento, il dislocamento ∆ equivale numericamente al peso dell’imbarcazione, ossia
∇ =
∆ ρ
La forza peso e la forza di Archimede hanno due punti di applicazione differenti. Il peso è applicato nel baricentro o nel centro di gravità dell’imbarcazione (nel seguito denominato CG), mentre la spinta di Archimede è applicata nel baricentro del volume di carena detto anche centro di galleggiamento (nel seguito CB). Per l’equilibrio delle forze e dei momenti, come si nota dalla fig. 3-30 è necessario che CB e CG si trovino sulla stessa
CG e CG vengono posti sulla stessa retta in modo che non nasca un momento di beccheggio che imporrebbe una condizione di equilibrio in cui l’imbarcazione avrebbe un assetto leggermente appruato o appoppato. Allo stesso modo se i due punti non fossero sullo stesso piano di simmetria trasversale la barca raggiungere l’equilibrio in una condizione di leggera inclinazione verso sinistra o verso dritta.
Fig. 3-30, Centro di galleggiamento e baricentro dell'imbarcazione
Inoltre se il baricentro appartiene al piano di simmetria longitudinale la condizione di equilibrio non ha sbandamento.
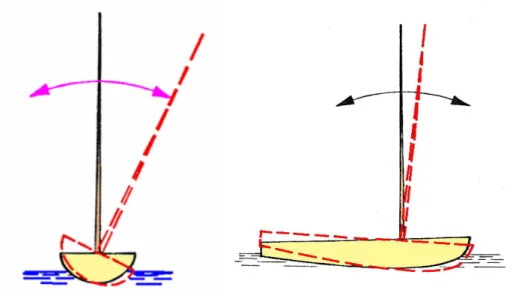
L’equilibrio statico raggiunto sotto l’effetto della forza peso e della forza di Archimede può essere perturbato per esaminare la stabilità dell’imbarcazione ossia la sua capacità ad opporsi a qualunque azione esterna che la allontani dal suddetto equilibrio. Si considera la possibilità di rotazioni attorno all’asse longitudinale e intorno all’asse trasversale dell’imbarcazione suddividendo la stabilità dell’imbarcazione nello studio della stabilità di forma trasversale (o di rollio) e stabilità di forma longitudinale (o di beccheggio).
Fig. 3-31, (a) Moto di rollio dell'imbarcazione, (b) Moto di beccheggio dell’imbarcazione
Stabilità di forma trasversale
nelle condizioni di equilibrio iniziale viene chiamata coppia raddrizzante. Se dopo la cessazione della causa della rotazione l’imbarcazione rimane nella nuova posizione si parla di condizione di equilibrio indifferente. Infine se a seguito della piccola rotazione l’imbarcazione si allontana sempre di più dalla condizione di riposo abbiamo una condizione di equilibrio instabile.
Le imbarcazioni moderne hanno generalmente due condizioni di equilibrio stabile: quella normale e quella capovolta di 180°. E’ possibile dimostrare che nelle imbarcazioni in cui il centro di gravità CG è al di sopra del centro di galleggiamento CB la posizione ribaltata di 180° è una condizione di equilibrio stabile [31 e 83].
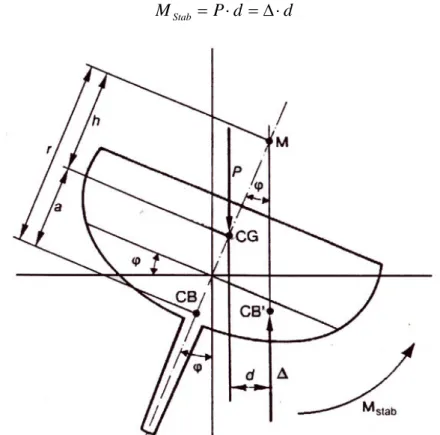
Naturalmente il valore della coppia raddrizzante varia con continuità in funzione dell’angolo di sbandamento imposto. Per piccole rotazioni lo studio di stabilità trasversale viene effettuato con il metodo dell’altezza metacentrica. In fig. 3-32 è mostrato l’assetto tipico di una barca sottoposta ad un piccolo angolo di sbandamento ϕ.
La posizione del centro di gravità CGrimane invariata essendo determinato dalla distribuzione dei pesi dell’intera imbarcazione. Il centro di galleggiamento CB invece cambia posizione essendosi modificata la forma della parte immersa a seguito dello sbandamento: si sposta infatti dal punto CB al nuovo punto CB'. La forza peso e la forza di galleggiamento non si trovano più sulla stessa retta di applicazione e viene, quindi, prodotta una coppia raddrizzante MSTAB il cui braccio è la distanza d che intercorre tra le rette di applicazione di tali forze.
Si ha quindi:
d d P
MStab = ⋅ =∆⋅
Fig. 3-32, Metodo del metacentro per il calcolo della stabilità al rollio
Per determinare tale coppia raddrizzante è necessario mettere in relazione la distanza d con le caratteristiche geometriche della carena. Per far ciò si definisce il punto M , detto metacentro, intersezione della verticale passante per CB' e per la mezzeria verticale dello
)
(CB−M e con a la distanza fra il centro di gravità e il centro di galleggiamento si ottiene: ϕ ϕ sin sin ) (r a h d = − =
dove h è denominata altezza metacentrica,. Quindi è possibile esprimere la coppia raddrizzante come: ϕ ϕ sin sin h h P MStab = ⋅ =∆⋅
Il metodo dell’altezza metacentrica è utile per studiare la stabilità per piccoli sbandamenti ma la procedura è facilmente estendibile ad angoli di sbandamento maggiori. In letteratura [31] sono presenti metodi per il calcolo del valore numerico dell’altezza metacentrica per un dato angolo di sbandamento avendo a disposizione i piani strutturali dell’imbarcazione in assetto sbandato. Tali metodi si basano sullo studio della figura di galleggiamento che,inizialmente simmetrica, assume una forma fortemente asimmetrica con l’aumentare dell’angolo di sbandamento. Tramite calcoli di integrazione numerica è possibile calcolare il nuovo asse baricentrico.
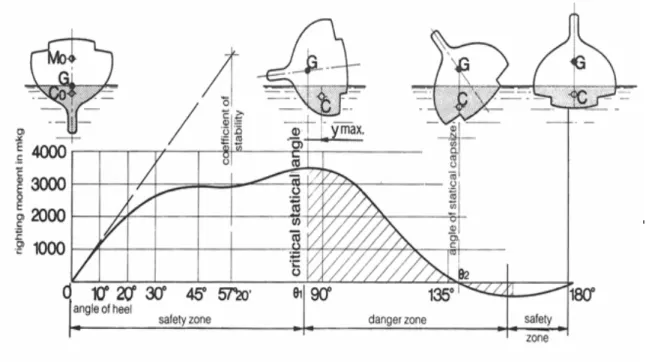
Il risultato di tali calcoli è spesso rappresentato in grafici mostrati in fig. 3-33 denominati curve di stabilità.
Fig. 3-33, Tipica curva di stabilità di una moderna barca a vela
In tali grafici, in base all’angolo di sbandamento, viene rappresentata la coppia raddrizzante corrispondente. Si nota come per piccoli angoli di sbandamento il grafico assuma caratteristiche lineari e con angoli di sbandamento superiori ad una certa soglia si passi da una zona sicura ad una zona di pericolo fino ad arrivare allo scuffiamento vero e proprio. Inoltre è possibile notare che esiste una zona in cui la coppia raddrizzante cambia di segno divenendo coppia sbandante la cui condizione di equilibrio risulta essere quella a
Stabilità longitudinali
Lo studio delle stabilità longitudinale ricalca lo studio della stabilità trasversale. In relazione alla fig. 3-34 si hanno l’altezza metacentrica longitudinale e raggio metacentrico longitudinale.
Fig. 3-34, Altezza metacentrica per lo studio della stabilità longitudinale
3.5.2 Forze Idrodinamiche
Le forze idrodinamiche si riferiscono ai meccanismi di interazione che si sviluppano coinvolgendo la porzione dello scafo immersa nell’acqua e le appendici di carena, ossia la pinna di deriva, l’eventuale bulbo e il timone.
Fig. 3-35, Componenti di una barca a vela interessate dalle forze aerodinamiche: scafo, deriva, timone
3.5.2.1 Azioni di resistenza
Il movimento di una imbarcazione nell’acqua provoca una perturbazione nel fluido che la circonda. Effetti di tale perturbazione sono ad esempio l’energia dissipata all’interno dello strato limite, la turbolenza che la barca genera a poppa (causa delle scie che le imbarcazioni lasciano al loro passaggio) e l’energia utilizzata per la creazione del moto ondoso. L’energia necessaria per provocare tali effetti indesiderati non può che essere sottratta dal motore propulsivo dell’imbarcazione che sia a vela o a motore. Nel caso
intensità, è quanto mai necessario ottimizzare la forma dello scafo e delle appendici idrodinamiche in modo da ridurre il più possibile ogni forma di resistenza all’avanzamento.
Da un punto di vista qualitativo è possibile scomporre la resistenza idrodinamica a cui è sottoposta una imbarcazione a vela in tre parti fondamentali:
• La resistenza che viene prodotta dalla barca mentre naviga diritta
• La resistenza aggiuntiva che si sviluppa quando la barca naviga sotto un certo sbandamento
• La resistenza che la barca incontra in presenza del moto ondoso in funzione dello stato del mare
In assenza di sbandamento, caratteristica tipica delle andature portanti, la resistenza all’avanzamento viene ulteriormente scomposta in modo da evidenziare le diverse cause che ne sono all’origine. Si suddivide in
• Resistenza di attrito • Resistenza di forma
La resistenza di attrito si produce nel caso generale di un solido investito da un fluido viscoso. In fig. 3-36 è rappresentato un fluido in moto laminare che si sposta parallelamente ad una lastra piana ferma lambendone la superficie.
Fig. 3-36, Strato limite di fluido viscoso
A causa della rugosità della superficie si creano forze di attrazione molecolare tra fluido e lastra che fanno sì che le particelle di fluido a contatto con la lastra risultino ferme. Allontanandosi progressivamente dalla lastra, la velocità dei filetti fluidi aumenta finché viene raggiunta la velocità di traslazione della massa fluida che caratterizza il flusso laminare e si raggiunge la velocità del fluido indisturbato. La zona di fluido compresa tra la superficie della lastra e il punto in cui si raggiunge la velocità del flusso indisturbato viene chiamata strato limite. A causa della viscosità del fluido, all’interno di tale strato nascono forze tangenziali provocate dalle variazioni di velocità. Ciò provoca fenomeni di dissipazione di energia e le azioni tangenziali sono responsabili della nascita della resistenza di attrito. In fig. 3-37 è mostrata una rappresentazione della resistenza di attrito
Fig. 3-37 Forza di attrito viscoso sulla pinna di deriva
La resistenza di forma è causata, invece, da diversi fenomeni che tuttavia hanno stretti legami con la forma geometrica dello scafo e delle appendici di carena. Uno schema concettuale della resistenza di forma è rappresentata in fig. 3-38.
Fig. 3-38, Schematizzazione della resistenza di forma della deriva
Nelle andature comprese dalla bolina al traverso la barca sbanda sotto l’effetto della spinta del vento sulle vele e, come detto precedentemente, la barca deve sviluppare una portanza idrodinamica che bilancia la forza aerodinamica laterale; di conseguenza la barca deve procedere con un certo angolo di scarroccio. In tali condizioni la resistenza aumenta a causa di due nuovi contributi:
• La resistenza di sbandamento
• La resistenza di scarroccio (detta anche resistenza indotta)
Come sarà chiarito in seguito, contestualmente alla nascita di una portanza idrodinamica, si ha la nascita di una resistenza e a questa componente ulteriore di resistenza che caratterizza
per effetto dello sbandamento che subisce lo scafo si ha un ulteriore aumento della resistenza, perché alla formazione d’onda a barca sbandata si accompagna un dispendio energetico maggiore che a barca dritta e quindi si produce una resistenza maggiore: a tale effetto si da il nome di resistenza di sbandamento.
3.5.2.2 Azioni di portanza
Vengono qui introdotte le basi della teoria delle sezioni alari, necessarie per il proseguimento della trattazione. Per un più approfondito studio di questo vasto argomento si rimanda a testi specializzati come [2] mentre un testo classico se pur datato sull’argomento può essere [1]. La teoria delle sezioni alari nata nel 1800 in campo aeronautico ha paradossalmente contribuito in modo determinante allo sviluppo delle imbarcazioni che erano state costruite da migliaia di anni. Per profilo alare si intende un corpo solido immerso in un fluido in movimento, di forma tendenzialmente allungata nella direzione del flusso che lo investe. Nei profili alari a forma rettangolare, qui considerati, si definiscono due parametri fondamentali per la definizione della forma del profilo: superficie alare e allungamento geometrico. In relazione alla fig. 3-39, la superficie alare
A e l’allungamento geometrico (aspect ratio) AR si definiscono come g
c b A= ⋅ c b ARg =
dove crappresenta la corda e bl’apertura alare.
Fig. 3-39, Grandezze fondamentali della pinna di deriva
Se si rappresenta il flusso del fluido che investe il profilo orizzontale e si pensa il profilo disposto trasversalmente rispetto al flusso, si ha la situazione mostrata in fig. 3-40
Fig. 3-40, Generazione di portanza su un profilo alare investito da un flusso
I filetti fluidi si separano rispetto al punto S1 e si riuniscono nel punto S2. Essendo il percorso della parte alta più lungo rispetto a quello della parte bassa, i filetti fluidi superiori devono necessariamente aumentare velocità per ricongiungersi con i rispettivi filetti della parte bassa nel bordo d’uscita. A causa della legge di Bernoulli
costante 2
1 2 =
+ V
p ρ
ad una velocità maggiore si accompagna una diminuzione di pressione e viceversa. Per cui la parte inferiore è interessata da una variazione di pressione positiva, mentre la parte superiore da una variazione di pressione negativa. La risultante di questa distribuzione di pressione è la forza aerodinamica che ammette una componente perpendicolare alle linee del flusso chiamata portanza e una componente parallela chiamata resistenza.
Fondamentale per la generazione di queste due forze è l’angolo di incidenza con cui il profilo alare è investito dal fluido. Nel caso delle appendici di carena tale angolo è lo scarroccio. Infatti per definizione l’angolo di scarroccio è l’angolo che esiste fra l’asse longitudinale dell’imbarcazione e il vettore rappresentativo della direzione effettiva di movimento della barca. Entro certi limiti, all’aumentare dell’angolo di scarroccio si ha un aumento della portanza prodotta dalla deriva e dal timone ma anche un contestuale aumento della resistenza. A causa della piccola entità dell’angolo di scarroccio durante le normali manovre di una barca a vela non si instaurano mai fenomeni di stallo e di distacco del flusso, problemi che in altri ambiti tecnici sono attentamente presi in considerazione da un punto di vista della sicurezza.
Fig. 3-41, Schematizzazione della di portanza e di resistenza sulla deriva a causa dell'angolo di scarroccio
3.5.3 Forze Aerodinamiche
Le forze aerodinamiche nascono dai fenomeni di interazione tra imbarcazione e l’aria. A tali interazioni sono interessate, naturalmente, le vele ma anche la porzione di scafo emersa poiché attrezzatura, albero, sartiame offrono una certa resistenza all’avanzamento dell’imbarcazione. Come si è visto per le forze idrodinamiche, anche al di sopra del pelo dell’acqua si hanno sia azioni di portanza sia azioni di resistenza.
In prima approssimazione si può riprendere quanto detto sui profili alari a cui sono riconducibili le appendici di carena. Quando una vela deflette un flusso d’aria incidente si crea una zona di sovrapressione nella parte sopravvento e una zona di depressione nella parte sottovento. L’effetto di tali distribuzioni è una forza risultante che può essere pensata applicata in un unico punto che viene chiamato centro velico. Tale forza è scomponibile in una componente di portanza perpendicolare alla direzione del flusso incidente e una componente di resistenza parallela alla direzione del flusso incidente. A differenza delle appendici idrodinamiche, le quali lavorano sempre con piccoli angoli di incidenza, gli angoli di incidenza ai quali possono essere sottoposte le vele variano all’interno di un intervallo ben più vasto. Come angolo di incidenza per le vele si considera l’angolo compreso tra la direzione del vento apparente e la corda della vela definita come la congiungente tra il bordo di ingresso e quello di uscita. Per una corretta regolazione delle vele, quando la barca navigherà di bolina dovranno essere imposti angoli di incidenza piccoli per produrre maggior portanza possibile mentre nelle andature più larghe il compito della vela si modifica nel senso che viene ricercata la produzione di una forza aerodinamica più grande possibile, in cui la componente di resistenza sia predominante. Da un punto di vista generale si può affermare che il calcolo delle due componenti di portanza e di resistenza della forza prodotta dalle vele può essere affrontato mediante espressioni del tipo: 2 2 1 A P A C SA V P = ρ ⋅ ⋅ 2 2 1 A R A C SA V R = ρ ⋅ ⋅
dove ρ rappresenta la densità dell’area, SA la superficie velica, VA la velocità, CP il coefficiente di portanza e CR il coefficiente di resistenza.
Lo studio della produzione di forze da parte della velatura di una barca a vela, in prima approssimazione ricalca gli studi sulle lastre sottili curve. Con riferimento alla fig. 3-43
Fig. 3-43, Principali caratteristiche della sezione di una vela
si definiscono le principali grandezze di una vela quali lo spessore, la freccia massima e la sua posizione all’interno della lunghezza interna della corda.
La caratteristica principale della velatura che le differenzia dai profili alari tradizionali è sicuramente lo spessore trascurabile essendo il rapporto fra lo spessore e la corda nell’ordine di 11000. Inoltre il materiale con cui sono costruite le vele è privo di rigidità e si deforma sotto lo sforzo.
Fig. 3-44, Grandezze fondamentali della geometria di una vela
La forza totale aerodinamica, che ha una componente parallela e una componente perpendicolare alla direzione del flusso d’aria che investe la velatura, può essere ulteriormente scomposta in due contributi. Infatti se considero la direzione effettiva del moto dell’imbarcazione posso pensare la forza totale come la risultante di una forza di propulsione, diretta parallelamente alla direzione del moto, e una forza sbandante diretta perpendicolarmente.
Fig. 3-45 Scomposizione delle forze aerodinamiche
Fig. 3-46, Punto di applicazione delle forze aerodinamiche
Con semplici considerazioni geometriche si può vedere che il coefficiente di resistenza delle vele ha un duplice effetto dannoso:
• Diminuisce il coefficiente di spinta motrice • Aumenta il coefficiente di forza sbandante
Quindi per una efficace conduzione della barca a vela è necessario regolare le vele in modo da massimizzare la componente di propulsione nella direzione del moto e di minimizzare la forza sbandante. In altre parole per poter massimizzare la forza motrice, dobbiamo massimizzare l’efficienza della vela
R p C C = η
La ottimizzazione di tale parametro risulta evidente nei grafici polari in cui nelle ascisse è posto il coefficiente di portanza CP mentre sulle ordinate quello di resistenzaCRcome mostra la Fig. 3-47 . Ogni vela è caratterizzata da una serie di tali grafici, sui quali influisce la lunghezza della corda, la freccia massima e la posizione della freccia massima. Per una completa trattazione, se pur qualitativa, dell’effetto dei vari parametri sui coefficienti di portanza e resistenza delle vele si rimanda a [65]. Ad un angolo di incidenza nullo la vela sfarfalla e il vento produce solamente resistenza. Facendo poi aumentare l’angolo di incidenza si inizia a produrre portanza mentre la resistenza aumenta di poco. Nel grafico in
figura, e quindi per questa particolare vela, il miglior rapporto portanza/resistenza (cioè dove si ha la maggiore spinta motrice) coincide con un angolo di incidenza prossimo a 27°.
Fig. 3-47, Coefficienti portanza e resistenza in funzione dell’angolo di incidenza
In fig. 3-48 è mostrato schematizzato il modo in cui in una barca a vela è possibile variare l’angolo di incidenza con cui la randa e il fiocco vengono investiti. L’angolo di incidenza, definito come l’angolo che si forma tra la corda della vela e la direzione di provenienza del vento apparente, può essere variato se le vele vengono cazzate o lascate tramite le drizze. Essendo in un dato istante costante la direzione di provenienza del vento apparente, allontanando o avvicinando la corda della vela alla mezzeria della barca si riduce o si aumenta l’angolo di incidenza.