INDICE
1
ARCHITETTURA SS2500
2
1.1 ARCHITETTURA HARDWARE 2
Capitolo 1: ARCHITETTURA SS 2500
1 ARCHITETTURA SS2500
La SS2500 è stata realizzata secondo le seguenti architetture hardware e software:
1.1 Architettura HARDWARE
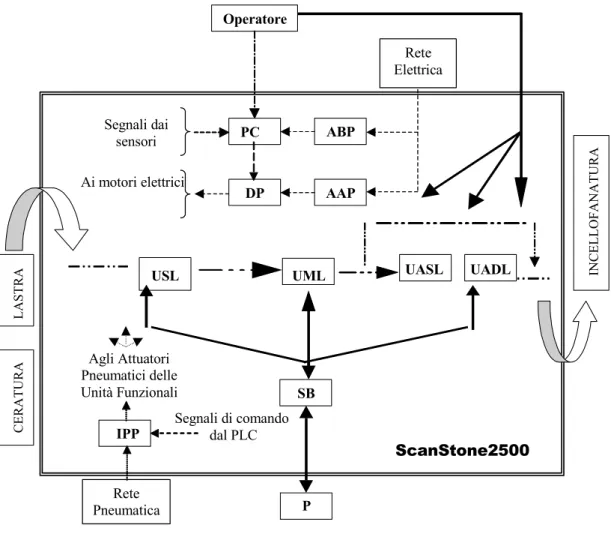
La SS2500 è stata realizzata, per quanto riguarda l’architettura hardware, in accordo con il modello fisico descritto in figura 4-1.
Figura 1: Modello fisico della SS2500 PC DP ABP AAP Operatore Segnali dai sensori Ai motori elettrici SB P IPP Agli Attuatori Pneumatici delle Unità Funzionali Segnali di comando dal PLC LA S T R A ScanStone2500 Rete Elettrica Rete Pneumatica C E RA T U RA INC ELLOF A NATU R A
UML UASL UADL USL
Capitolo 1: ARCHITETTURA SS 2500
P Pavimento PC Programmable Controller
SB Struttura di base ABP Alimentazione di Bassa Potenza
USL Unità di sostegno Lastra AAP Alimentazione di Alta Potenza UML Unità di Movimentazione Lastra DP Drivers di Potenza
UADL Unità Acquisizione Dati
Lastra IPP
Interruttore Potenza Pneumatica
UASL Unità Acquisizione Spessore Lastra
Interfaccia Utente Collegamento meccanico
Collegamento pneumatico Flusso Lastre
Collegamento elettrico
Secondo tale modello SS2500 è composta da: • Struttura di Base (SB)
La struttura di base della macchina ha la funzione di supportare le unità funzionali e di consentire il loro corretto posizionamento reciproco, oltre che il posizionamento dell’intera macchina rispetto alla linea di lucidatura e di incellofanatura. La struttura di base è connessa al pavimento (P) dell’ambiente.
• Unità Sostegno Lastra (USL)
Questa unità consente di sorreggere le lastre durante la fase di acquisizione dei dati precedentemente specificati.
• Unità Movimento Lastra (UML)
Questa unità consente di movimentare le lastre durante la fase di acquisizione dei dati sopra specificati.
Capitolo 1: ARCHITETTURA SS 2500
• Unità Acquisizione Spessore della Lastra (UASL)
Questa unità consente di acquisire lo spessore della lastra.
• Alimentatore di Alta Potenza (AAP)
Questo componente provvede a fornire energia elettrica non modulata ai Drivers di Potenza (DP).
• Alimentatore di Bassa Potenza (ABP)
Questo componente provvede a fornire l’energia di bassa potenza necessaria all’alimentazione del PC Industriale.
• Unità di elaborazione dati (PC) Tale componente provvede alla:
• gestione del sistema di controllo che sovrintende sia alla parte elettrica che pneumatica;
• acquisizione ed elaborazione dell’immagine proveniente da UADL;
• gestione delle comunicazioni con le altre macchine e/o dispositivi presenti sulla linea;
• elaborazione dei segnali provenienti dai vari sensori presenti sulla macchina e controllo delle unità funzionali della SS2500;
• comunicazione con l’utente per il setting dei parametri di lavoro e l’attivazione degli stati di funzionamento.
• Interruttore di Potenza Pneumatica (IPP)
Capitolo 1: ARCHITETTURA SS 2500
1.2 Architettura SOFTWARE
Per quanto riguarda l’architettura software, la SS2500 è stata realizzata dividendo il sistema in due parti ben distinte.
Una parte e` dedicata alla gestione dei movimenti della telecamera, alla sincronizzazione della stessa con gli organi meccanici costituenti la SS2500 ed alla ricomposizione delle immagini. L’altra parte invece si occupa della gestione del database di cui la macchina dovra` essere dotata, per consentire una memorizzazione delle immagini per il tempo necessario.
L’elaboratore dedicato al processo di scansione esegue diverse operazioni a priorità diverse.
Una sezione dell’algoritmo si occupa della cattura dei fotogrammi (frames) provenienti dalla fotocamera. Questa sezione del programma viene eseguita in tempo reale, tramite meccanismi di priorità forniti dal sistema operativo. La corrispondenza tra fotogramma e posizione assoluta nella superficie della lastra viene mantenuta con il controllo software del sistema meccanico garantito dai sensori appositamente installati sui sistemi di movimentazione.
L’operazione di “incollaggio” dei singoli fotogrammi viene chiamata stitching. I calcoli previsti in questa fase vengono effettuati off-line, a priorità più bassa dell’acquisizione, usando la memoria virtuale e il disco fisso (file mapping) del calcolatore come buffer. La fase di stitching prevede, come primo passo, di eliminare le deformazioni introdotte dall’ottica della videocamera, basandosi su parametri statici calcolati in una precedente fase di calibrazione.
Il secondo passo consiste nel calcolo dei punti ottimali di stitching, tramite i quali si raffina la posizione esatta del fotogramma sul piano dell’immagine finale. L’analisi avviene tramite lo studio dell’errore minimo nel colore dei pixel nelle parti a comune. L’immagine finale viene generata direttamente in formato compresso (JPEG), per
Capitolo 1: ARCHITETTURA SS 2500
immagini nell’elaboratore fino a quando il modulo di comunicazione di rete non risponda a richieste remote provenienti da una programmazione preimpostata (interfaccia con il sistema database).