CAPITOLO QUARTO
Risultati
4. 1 Caratteristiche dei soggetti esaminati
.Le scale di valutazione funzionale somministrate ai soggetti patologici dai terapisti sono le seguenti: la Motor Status Score (MSS), la Modified Ashworth Scale (MAS), e il Range of Motion (ROM). Nelle tabelle sottostanti vengono riportati i punteggi delle scale di valutazione somministrate ai soggetti patologici ad inizio e a fine terapia.
P01 Pre trattamento Fine trattamento Differenza
ROMs (max 760) 590 630 40
ROMg (max 460) 460 460 0
MASs (max 21) 5 0 -5
MASg (max 12) 2 2 0
MSS (max 36) 4.8 10.4 5.6
P02 Pre trattamento Fine trattamento Differenza
ROMs (max 760) 720 740 20
ROMg (max 460) 460 460 0
MASs (max 21) 0 0 0
MASg (max 12) 1.5 1 -0.5
MSS (max 36) 25.4 27.4 2
Tabella 14. Punteggi delle scale di valutazione funzionale somministrate ai soggetti patologici P01 e P02. Gli indici con “s” e “g” indicano i punteggi delle scale relativi rispettivamente alla spalla e al gomito.
I seguenti grafici rappresentano rispettivamente i punteggi della Motor Status Score, della Modified Ashworth Scale e del Range of Motion.
(a) (b) MSS 0 5 10 15 20 25 30 P01 P02 Pre-treatment Post-treatment MAS 0 1 2 3 4 5 6 P01-MASs P01-MAsg P02-MASs P02-MASg Pre-treatment Post-treatment
(c)
Figura 76. Punteggi di P01 e P02 ad inizio e fine terapia, relativi rispettivamente alla Motor Status Score (a), alla Modified Ashworth Scale (b) e al Range of Motion (c).
Il soggetto P01 è caratterizzato da un danno motorio grave, come si può vedere dai punteggi delle scale di valutazione funzionale, in particolare dalla Motor Status Score (MSS). I punteggi, inoltre, mostrano un lieve miglioramento durante il periodo di terapia robotica. Il soggetto P02 è caratterizzato da un danno motorio lieve, come si può vedere da tutti i punteggi delle scale di valutazione funzionale. I punteggi, inoltre, mostrano un leggero miglioramento durante il periodo di terapia robotica.
A causa dell’esiguo numero di soggetti partecipanti alla sperimentazione, non è stato possibile effettuare un’analisi statistica per i risultati.
4. 2 Risultati dell’analisi cinematica
4. 2. 1 Risultati dell’analisi cinematica per gli esercizi della terapia
robotica: Clock-like e Fan- like.
I soggetti sani hanno effettuato una singola ripetizione degli esercizi previsti dalla terapia riabilitativa robotica (Clock-like e Fan-like). I relativi parametri sono ricavati direttamente dalla singola esecuzione degli esercizi.
I soggetti patologici, invece, per ogni sessione di registrazione, hanno effettuato quattro ripetizioni dell’esercizio previsto dalla terapia robotica, quindi i parametri ottenuti rappresentano i valori medi nelle quattro ripetizioni.
I soggetti sani hanno eseguito gli esercizi con l’arto dominante, i soggetti patologici con l’arto paretico (non dominante per P01 e dominante per P02). Occorre sottolineare che P01 effettua la terapia con l’arto emiparetico non dominante quindi non ha le stesse caratteristiche
ROM 0 100 200 300 400 500 600 700 800 P01-ROMs P01-ROMg P02-ROMs P02-ROMg Pre-treatment Post-treatment
del gruppo di controllo dei sani: per testare la validità dei parametri bisogna quindi prediligere i parametri che mostrano valori differenti tra P01 e i sani (che effettuano, invece, l’esercizio con l’arto dominante).
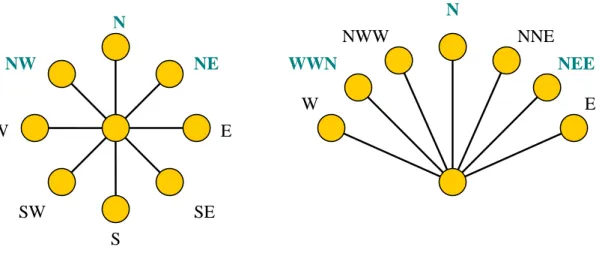
I parametri forniti dall’analisi cinematica sono: 1) accuratezza, 2) efficienza, 3) velocità media e 4) numero di picchi nel profilo di velocità. Sono stati calcolati i parametri cinematici relativi ad ogni direzione prevista dagli esercizi. L’esercizio Clock-like prevede che venga effettuato un movimento di reaching andata e ritorno (gli identificativi “t” e “b” indicano toward e back), in 8 direzioni dello spazio: Nord, Nord-Est, Est, Sud-Est, Sud, Sud-Ovest, Ovest, Nord-Ovest. L’esercizio Fan-like invece prevede movimenti in 7 direzioni: Nord, Nord-Nord Est, Nord Est, Est, Nord-Nord Ovest, Nord-Ovest ed Ovest.
Le direzioni Nord, Nord-Est e Nord-Ovest sono comuni ai due esercizi.
Figura 77a. Illustrazione delle direzioni negli esercizi Clock-like (a sinistra) e Fan-like (a destra). In verde sono evidenziate le direzioni comuni ai due esercizi.
Nei grafici vengono riportati, per ogni direzione dell’esercizio, i valori di ogni parametro dei soggetti patologici ad inizio, metà e fine trattamento e il confronto tra questi e la media dei sani. Nei grafici le sigle indicanti le direzioni di movimento riportano in maiuscolo la direzione, corrispondente a quelle precedentemente indicate negli esercizi della terapia, “b” e “t” che indicano la percorrenza del movimento (back dal target alla posizione di partenza, toward dalla posizione di partenza verso il target). Le direzioni comuni agli esercizi Clock-like e Fan-Clock-like sono indicate con le sigle dell’esercizio Clock-Clock-like. Le direzioni Est ed Ovest, indicate con lo stesso nome per l’esercizio Clock-like e Fan-like, ma corrispondenti a direzioni diverse per i due esercizi, sono indicate con la stessa sigla della direzione, ma identificati con la lettera “c” per l’Est e l’Ovest del Clock-like e “f” per quelle del Fan-like.
N E W NE NW S SE SW NWW E NEE NNE N W WWN
Ta b ella 1 5 . V a lo ri d i a cc u ra tezz a , efficien za , ve lo cità med ia e n u mero d i p icc h i n el p ro filo d i v elo cità p er c ia scu n s o g g ett o s a n o p er o g n i d ir ezio n e d el mo vime n to effettu a to n eg li e serciz i p rev is ti d a lla tera p ia r o b o tica . Oltr e a i v a lo ri p er o g n i sin g o lo s o g g ett o , ve n g o n o f o rn ite a n ch e la med ia e la d ev ia zio n e sta n d a rd d el g ru p p o d ei so g g etti sa n i.
Tabella 16. Valori di accuratezza, efficienza, velocità media e numero di picchi nel profilo di velocità per ciascun soggetto patologico, per ogni direzione del movimento effettuato negli esercizi previsti dalla terapia robotica. L’esercizio corrispondente al pre-trattamento è il Clock-like, mentre quello corrispondente a metà e
fine trattamento è il Fan-like
Allo stesso modo nella legenda i valori dei parametri sono indicati nel seguente modo: in maiuscolo l’identificativo del soggetto patologico, in minuscolo “c” indica Clock-like, l’esercizio effettuato nella prima sessione di terapia, “fh” indica like half, l’esercizo Fan-like eseguito a metà terapia e “fe” indica Fan-Fan-like End, l’eserczio Fan-Fan-like effettuato nell’ultimo giorno di terapia robotica. Per i soggetti sani viene riportata la media del gruppo, indicata con “Healthyc ” per l’esercizio Clock-like, e “Healthyf ” per l’esercizio Fan-like. Dal grafico relativo al parametro “Accuratezza” si può notare che: 1) l’accuratezza per l’andata e il ritorno di ogni direzione è molto simile, 2) i movimenti eseguiti in maniera più accurata corrispondono alle direzioni comuni Nord e Nord-Est, alla direzione Est per l’esercizio Clock-like e alle direzioni Est, Nord-Nord Est e Nord-Ovest per l’esercizio Fan-like; 3) i valori di accuratezza sono “peggiori” per le direzioni esclusive dell’esercizio
Clock-like rispetto alle direzioni esclusive dell’esercizio Fan-Clock-like, come ci si sarebbe potuti aspettare dato che l’esercizio Clock-like è eseguito prima di iniziare la terapia robotica, mentre l’esercizio Fan-like dovrebbe già mostrare gli effetti della terapia. Questo tuttavia non si riscontra in maniera evidente nelle direzioni comuni ai due esercizi.
Figura 77b. Valori del parametro” accuratezza” per ogni direzione di movimento per ciascun soggetto patologico con la media dei soggetti sani.
Figura 78. Valori del parametro “efficienza” per ciascun soggetto patologico e la media dei soggetti sani per ogni direzione di movimento.
Dal grafico relativo al parametro “Efficienza” si può notare che: 1) l’efficienza per il movimento di andata e ritorno dalla posizione di partenza di ogni direzione è molto simile, 2) la maggior parte dei movimenti sono eseguiti con un valore di efficienza simile; 3) i valori di efficienza sono “peggiori” per il soggetto P01, particolarmente in alcune direzioni: direzione Est esclusiva dell’esercizio Clock-like, direzioni Nord-Est, Nord e Nord-Ovest (toward) comuni ai due esercizi, e direzioni Est e Nord-Nord-Est per l’esercizio Fan-like.
La direzione Est potrebbe risultare più difficile per il soggetto P01 perché corrisponde ad un movimento che coinvolge l’estensione della spalla e del gomito, movimento ridotto a causa della spasticità. Si nota comunque un miglioramento per quello che riguarda le direzioni Nord e Nord-Est comuni ai due esercizi della terapia.
Il parametro “Efficienza”, per quanto riguarda gli esercizi della terapia, riesce a discriminare le difficoltà soggettive di esecuzione del movimento e mostra un andamento di miglioramento nel corso della terapia per ciascun soggetto patologico.
Figura 79. Valori del parametro “velocità media” per ciascun soggetto patologico e la media dei soggetti sani per ogni direzione di movimento.
Dal grafico relativo al parametro “Velocità media” si può notare che: 1) la velocità media per l’andata e il ritorno di ogni direzione è molto simile, 2) i soggetti sani presentano dei valori molto maggiori di velocità rispetto ai soggetti patologici, 3) non c’è una differenza significativa nei valori di velocità per ogni direzione, 4) il soggetto patologico P01 mostra valori minori rispetto al soggetto P02 e ai soggetti sani.
Il parametro velocità media fornisce una differenziazione marcata tra soggetti patologici e tra questi e i soggetti sani, inoltre mostra per essi un miglioramento nella maggior parte delle direzioni nel corso della terapia. C’è da sottolineare, però, la grande deviazione standard per i soggetti sani che potrebbe essere diminuita facendo loro effettuare più ripetizioni degli esercizi.
Figura 80. Valori del parametro “numero di picchi nel profilo di velocità” per ciascun soggetto patologico e la media dei soggetti sani per ogni direzione di movimento.
Dalla figura 80 relativa al parametro “Numero di picchi nel profilo di velocità” si possono fare le seguenti osservazioni: 1) il numero di picchi nel profilo di velocità per l’andata e il ritorno dalla posizione di partenza di ogni direzione è molto simile, 2) i valori hanno un andamento molto simile ai valori del parametro efficienza, 3) c’è una significativa differenza tra i valori del soggetto P01, del soggetto P02 e tra i soggetti patologici e i soggetti sani, 4) il soggetto P01 presenta valori maggiori nelle stesse direzioni per cui aveva valori peggiori di efficienza.
Il parametro “Numero di picchi nel profilo di velocità” sembrerebbe quindi in grado di rilevare le caratteristiche e le difficoltà soggettive dell’esecuzione di un movimento: esso mostra un miglioramento nel corso della terapia riabilitativa robotica ed inoltre permette una distinzione netta tra i soggetti patologici e i soggetti sani. I soggetti sani comunque mostrano una grande deviazione standard, che potrebbe essere ridotta aumentando il numero di ripetizioni degli esercizi Clock-like e Fan-like per i soggetti sani.
Per quanto riguarda gli esercizi della terapia robotica, sono stati esaminati in dettaglio i parametri cinematici relativi alla direzione NORD, comune ad entrambi gli esercizi previsti dalla terapia e al movimento di reaching utilizzato per la messa a punto del metodo di valutazione funzionale.
Nella tabella 17, oltre alla media del gruppo e alla deviazione standard, per i soggetti sani viene indicato anche un altro parametro: la deviazione standard relativa o dispersione, espressa come il rapporto tra la deviazione standard σx e la media aritmetica dei valori,
ottenuta tramite l’applicazione della seguente formula:
Questo parametro (spesso usato in forma percentuale, cioè come = %RSD = σ% = 100σr)
consente di effettuare paragoni tra deviazioni di dati di tipo diverso, indipendentemente dalle loro quantità assolute.
Nord Clock-like Accuratezza Efficienza Vel. media # Picchi
S01 0,0027 1,2038 0,0431 39 S02 0,0026 1,0284 0,083 25,5 S03 0,0023 1,0456 0,0856 37,6667 S04 0,0056 1,0955 0,0603 73,6667 Media 0,0033 1,093325 0,068 43,95835 Dev. standard 0,00154272 0,078957 0,020117 20,71607 RSD 0,46749238 0,072217 0,295836 0,471266 Nord Fan-like S01 0,0046 1,0686 0,1062 41,5 S02 0,0066 1,0632 0,121 32 S03 0,0054 1,0481 0,1315 21,3333 S04 0,0056 1,0386 0,0889 82 Media 0,00555 1,054625 0,1119 44,20833 Dev. standard 0,0008226 0,013762 0,018515 26,50695 RSD 0,14821577 0,01305 0,165464 0,599592
Tabella 17. Valori di accuratezza, efficienza, velocità media e numero di picchi nel profilo di velocità per ciascun soggetto sano, per la direzione NORD degli esercizi previsti dalla terapia robotica. Oltre ai valori per
ogni singolo soggetto, vengono fornite anche la media, la deviazione standard del gruppo dei soggetti sani.
Nei grafici sottostanti vengono riportati i valori di ogni parametro dei soggetti patologici e la media dei sani per la direzione NORD.
P01 Accuratezza Efficienza Vel. media # Picchi
Pre trattamento 0.0133 4.7839 0.0201 936 Metà trattamento 0.0056 1.8945 0.0248 500.5 Fine trattamento 0.0066 2.0125 0.0263 494
P01-differenze Accuratezza Efficienza Vel. Media # Picchi
metà-pre -0,0077 -2,8894 0,0047 -435,5 fine-metà 0,001 0,118 0,0015 -6,5 fine-pre -0,0067 -2,7714 0,0062 -442
(b)
Tabella 18. Valori di accuratezza, efficienza, velocità media e numero di picchi nel profilo di velocità per la direzione NORD degli esercizi previsti dalla terapia robotica relativi al soggetto P01. Nella tabella (a) sono riportati i valori dei parametri corrispondenti alla direzione Nord degli esercizi eseguiti all’inizio, a metà e alla
fine della terapia robotica. Nella tabella (b) sono riportate, per ciascun parametro, le differenze nei diversi momenti di valutazione.
P02 Accuratezza Efficienza Vel. Media # Picchi
Pre trattamento 0.0085 1.3857 0.0343 148 Metà trattamento 0.0063 1.1370 0.0423 157.5000 Fine trattamento 0.0079 1.1252 0.0559 123.2500
(a)
P02-differenze Accuratezza Efficienza Vel. Media # Picchi
metà-pre -0,0022 -0,2487 0,008 9,5 fine-metà 0,0016 -0,0118 0,0136 -34,25 fine-pre -0,0006 -0,2605 0,0216 -24,75
(b)
Tabella 19. Valori di accuratezza, efficienza, velocità media e numero di picchi nel profilo di velocità per la direzione NORD degli esercizi previsti dalla terapia robotica relativi al soggetto P02. Nella tabella (a) sono riportati i valori dei parametri corrispondenti alla direzione Nord degli esercizi eseguiti all’inizio, a metà e alla
fine della terapia robotica. Nella tabella (b) sono riportate per ciascun parametro le differenze nei diversi momenti di valutazione.
Dalla figura 81, relativa al parametro “Accuratezza”, si nota un miglioramento dei soggetti patologici durante il corso della terapia robotica: miglioramento più marcato per P01 e molto meno marcato per P02. Tuttavia, a metà trattamento robotico, P01 e P02 presentano valori simili, con un’accuratezza migliore per P01 rispetto a P02, che perdura a fine trattamento. Questo risultato è discordante con la gravità del danno motorio dei due soggetti e con il recupero delle abilità di ciascun soggetto riportate dai punteggi delle scale di valutazione funzionale.
Dalla figura 82, relativa al parametro “Efficienza”, si nota un miglioramento dei soggetti patologici durante il corso della terapia robotica: miglioramento più marcato per P01 e meno per P02. P02, che, comunque, presenta un danno motorio lieve e recupera la capacità di svolgere il movimento avvicinandosi molto al gruppo dei sani. Questo risultato riflette il recupero delle abilità motorie riscontrato con i punteggi delle scale di valutazione funzionale.
Figura 81. Valori del parametro accuratezza nella direzione NORD degli esercizi previsti dalla terapia robotica. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori della media dei sani (parametri relativi all’esercizio Clock-like per il Pre-treatment e i
parametri relativi all’esercizio Fan-like per Half e Post-treatment).
Allo stesso modo P01, che presenta un danno motorio maggiore di P02, mostra un notevole miglioramento durante il corso del mese di terapia, ma non si avvicina alle performance dei sani. Il risultato relativo a P01 è dovuto in parte alla patologia, in parte al fatto che P01 effettua l’esercizio con l’arto paretico non dominante.
L’efficienza sembrerebbe essere un parametro che ben quantifica le caratteristiche e le abilità soggettive.
Dalla figura 83, relativa al parametro “Velocità media”, si nota un miglioramento per i soggetti patologici durante il corso della terapia robotica: miglioramento, questa volta, meno marcato per P01 e più per P02. Il parametro mostra una differenza netta tra i soggetti sani e i soggetti patologici, e tra i soggetti patologici. Tuttavia P01 non mostra il grande miglioramento riscontrato invece dagli altri parametri, miglioramento che invece è più visibile in P02: questo risultato non è in accordo con i punteggi ottenuti con le scale di valutazioni tradizionali (variazione di 5,6 punti nella Motor Status Score tra inizio e fine trattamento per P01 e variazione di 2 punti per P02).
Questo potrebbe indicare che il parametro velocità media è dipendente dall’esecuzione dell’esercizio.
Infine, dalla figura 84 relativa al parametro “Numero di picchi nel profilo di velocità”, si nota un miglioramento per i soggetti patologici durante il corso della terapia robotica:
CENTER TO NORD M OVEM ENT-ACCURACY
0 0,002 0,004 0,006 0,008 0,01 0,012 0,014 P01 P02 Healthy mean
Figura 82. Valori del parametro efficienza nella direzione NORD degli esercizi previsti dalla terapia robotica. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori della media dei sani (parametri relativi all’esercizio Clock-like per il Pre-treatment e i parametri relativi
all’esercizio Fan-like per Half e Post-treatment).
Figura 83. Valori del parametro velocità media nella direzione NORD degli esercizi previsti dalla terapia robotica. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei sani (parametri relativi all’esercizio Clock-like per il Pre-treatment e relativi
all’esercizio Fan-like per Half e Post-treatment).
miglioramento più marcato per P01 e meno per P02. Entrambi i soggetti migliorano ma non rientrano nel range dei soggetti sani.
CENTER TO NORD MOVEMENT-EFFICIENCY
0 1 2 3 4 5 6 P01 P02 Healthy mean
Pre-treatment Half-treatment Post-treatment
CENTER TO NORD MOVEMENT-MEAN SPEED [m/s]
0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 P01 P02 Healthy mean
Figura 84. Valori del parametro numero di picchi nel profilo di velocità nella direzione NORD degli esercizi previsti dalla terapia robotica. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti
patologici ed i corrispondenti valori della media dei sani (parametri relativi all’esercizio Clock-like per il Pre-treatment e i parametri relativi all’esercizio Fan-like per Half e Post-Pre-treatment).
Le differenze tra i parametri ad inizio terapia e i parametri a fine terapia potrebbero essere correlate ai punteggi riscontrati dalle scale di valutazione. Il parametro evidenzia le differenze tra i soggetti patologici e le differenze tra questi ultimi e i soggetti sani. L’andamento nel tempo dei valori di questo parametro è simile ai valori del parametro efficienza.
4. 2. 2 Risultati dell’analisi cinematica per il movimento di
reaching
Il movimento di reaching viene utilizzato per misurare le quantità cinematiche e dinamiche registrando in contemporanea il segnale EEG.
I soggetti sani vengono registrati una sola volta, i soggetti patologici in tre momenti diversi corrispondenti ad inizio, metà e fine terapia. I soggetti patologici eseguono il movimento di reaching prima di effettuare l’esercizio previsto dalla terapia robotica.
Tutti i soggetti eseguono 35 ripetizioni del movimento di reaching, e i parametri ottenuti rappresentano i valori medi sulle 35 ripetizioni.
CENTER TO NORD MOVEMENT-NUMBER OF PEAKS IN VELOCITY PROFILE 0 100 200 300 400 500 600 700 800 900 1000 P01 P02 Healthy mean
Figura 85. Raffigurazione del movimento di reaching
I soggetti sani hanno eseguito gli esercizi con l’arto dominante, i soggetti patologici con l’arto paretico (non dominante per P01 e dominante per P02).
I parametri forniti dall’analisi cinematica sono: 1) accuratezza, 2) efficienza, 3) velocità media e il 4) numero di picchi nel profilo di velocità.
L’analisi inoltre fornisce, per tutti i soggetti, la rappresentazione delle traiettorie compiute nell’esecuzione del movimento e i profili di velocità.
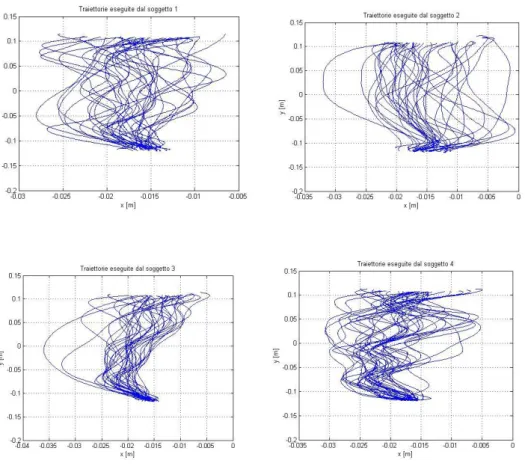
Figura 86. Traiettorie eseguite nelle 35 ripetizioni del movimento di reaching da ciascun soggetto sano.
22 cm
Cursore
Start
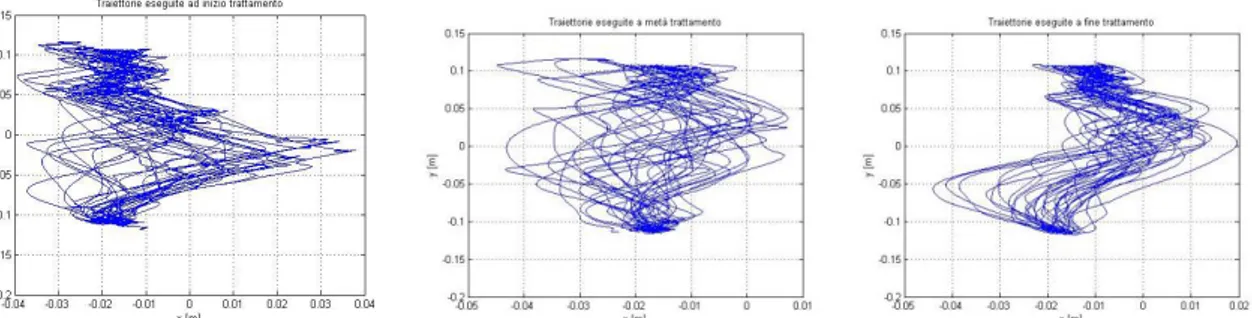
Figura 87. Traiettorie eseguite nelle 35 ripetizioni del movimento di reaching da P01 rispettivamente ad inizio, metà e fine terapia
Figura 88. Traiettorie eseguite nelle 35 ripetizioni del movimento di reaching da P02 rispettivamente ad inizio, metà e fine terapia
Come si può notare, le traiettorie dei soggetti patologici mostrano maggiori deviazioni laterali rispetto ai soggetti sani. Inoltre ogni soggetto presenta delle caratteristiche specifiche: P01 ha deviazioni laterali verso destra a metà del percorso tra il punto di partenza e il target, P02 ha deviazioni prima verso sinistra e poi una correzione verso destra alla fine del percorso tra il punto di partenza e il target di arrivo.
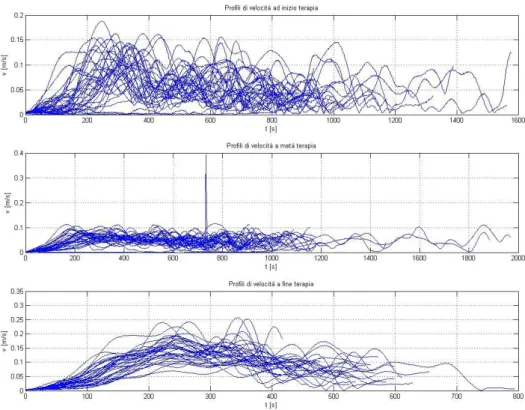
I grafici sottostanti mostrano invece i profili di velocità.
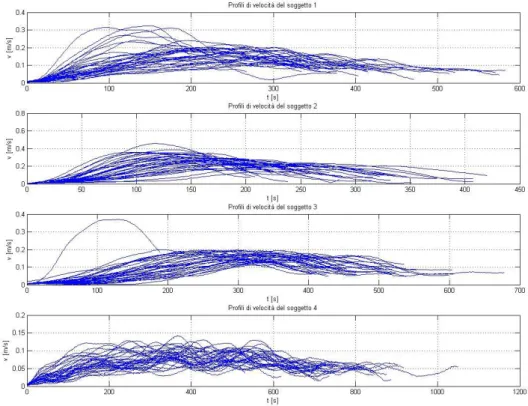
Come si può notare, i profili di velocità dei soggetti patologici sono differenti da quelli dei soggetti sani: i profili di velocità relativi ai soggetti sani hanno un andamento più lineare, mentre quelli relativi ai soggetti con patologia presentano molti picchi, soprattutto nei grafici relativi al pre-trattamento, che si riducono nel corso della terapia. Il parametro cinematico “Numero di picchi nel profilo di velocità” è molto significativo perché quantifica questa differenza.
Figura 89. Profili di velocità ottenuti dalle 35 ripetizioni del movimento di reaching ad opera dei soggetti sani.
Figura 90. Profili di velocità eseguiti da P01 nelle 35 ripetizioni del movimento di reaching ad inizio, metà e fine terapia
Figura 91. Profili di velocità eseguiti da P02 nelle 35 ripetizioni del movimento di reaching ad inizio, metà e fine terapia
Nelle tabelle vengono riportati separatamente i valori ottenuti per i soggetti sani e per ciascun soggetto patologico.
Reaching Accuratezza Efficienza Vel. Media # Picchi
S01 0,0171 1,0303 0,1212 49,6 S02 0,0153 1,0334 0,1683 19,3143 S03 0,0181 1,0287 0,0997 68,3714 S04 0,0199 1,0522 0,0653 132,7143 Media 0,0176 1,03615 0,113625 67,5 Dev. Standard 0,001921805 0,01087643 0,043112054 47,94419 RSD 0,109193449 0,01049696 0,379424014 0,710284
Tabella 20. Valori di accuratezza, efficienza, velocità media e numero di picchi nel profilo di velocità per ciascun soggetto sano relativi al movimento di reaching. Oltre ai valori per ogni singolo soggetto, vengono
fornite anche la media, la deviazione standard e la dispersione del gruppo dei soggetti sani.
P01 Accuratezza Efficienza Vel. Media # Picchi
Pre trattamento 0,0149 1,3006 0,0319 281,4857 Metà trattamento 0,0159 1,0893 0,0625 116,4 Fine trattamento 0,0112 1,1191 0,0518 154,7143
P01-differenze Accuratezza Efficienza Vel. media # Picchi
metà-pre 0,001 -0,2113 0,0306 -165,086 fine-metà -0,0047 0,0298 -0,0107 38,3143 fine-pre -0,0037 -0,1815 0,0199 -126,771
(b)
Tabella 21. Valori di accuratezza, efficienza, velocità media e numero di picchi nel profilo di velocità relativi al movimento di reaching effettuato dal soggetto P01. Nella tabella (a) sono riportati i valori dei parametri corrispondenti al movimento di reaching eseguito all’inizio, a metà e alla fine della terapia robotica. Nella
tabella (b) sono riportate per ciascun parametro le differenze nei diversi momenti di valutazione.
P02 Accuratezza Efficienza Vel. Media # Picchi
Pre trattamento 0,0252 1,1418 0,051 142,5143 Metà trattamento 0,015 1,0782 0,045 170,6 Fine trattamento 0,0232 1,0393 0,0901 70,6286
(a)
P02-differenze Accuratezza Efficienza Vel. Media # Picchi
metà-pre -0,0102 -0,0636 -0,006 28,0857 fine-metà 0,0082 -0,0389 0,0451 -99,9714
fine-pre -0,002 -0,1025 0,0391 -71,8857
(b)
Tabella 22. Valori di accuratezza, efficienza, velocità media e numero di picchi nel profilo di velocità relativi al movimento di reaching effettuato dal soggetto P02. Nella tabella (a) sono riportati i valori dei parametri corrispondenti al movimento di reaching eseguito all’inizio, a metà e alla fine della terapia robotica. Nella
tabella (b) sono riportate per ciascun parametro le differenze nei diversi momenti di valutazione.
Figura 92. Valori del parametro accuratezza del movimento di reaching. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei sani.
Dalla figura 92 relativa al parametro “Accuratezza”, si nota come non ci sia una netta differenziazione tra i soggetti patologici e i soggetti sani: il soggetto P01, che presenta il
ACCURACY 0 0,005 0,01 0,015 0,02 0,025 0,03 P01 P02 Healthy mean
danno motorio maggiore, ha valori di accuratezza maggiori rispetto ai soggetti sani. Tutti i soggetti presentano valori di accuratezza più grandi nel movimento di reaching rispetto al movimento in direzione Nord degli esercizi. Entrambi i soggetti non mostrano un andamento monotono nel tempo del parametro “Accuratezza”.
Figura 93. Valori del parametro efficienza del movimento di reaching. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei sani.
Dalla figura 93 relativa al parametro “Efficienza”, si nota una differenziazione netta tra soggetti patologici e soggetti sani. Per i soggetti sani, i valori del parametro “Efficienza” sono coerenti con quelli relativi alla direzione Nord degli esercizi delle terapia, i soggetti patologici mostrano valori minori nell’esecuzione del movimento di reaching rispetto ai valori relativi all’esecuzione del movimento in direzione Nord degli esercizi previsti dalla terapia riabilitativa robotica. Il soggetto P01 mostra un recupero più consistente, ma inferiore al soggetto P02, il quale, invece, si avvicina maggiormente alle performance del gruppo dei sani: questo risultato è in accordo con i punteggi ottenuti nelle scale di valutazione funzionale (in particolare nella MSS), e nei risultati dell’applicazione del parametro al movimento in direzione Nord degli esercizi della terapia robotica.
Dalla figura 94 relativa al parametro “Velocità media”, si può notare che questo parametro permette di discriminare i soggetti patologici dai soggetti sani. I valori di velocità media ottenuti nell’esecuzione del movimento di reaching sono leggermente maggiori a quelli ottenuti nell’esecuzione del movimento in direzione Nord degli esercizi dalla terapia robotica.
EFFICIENCY 0 0,2 0,4 0,6 0,8 1 1,2 1,4 P01 P02 Healthy mean
Figura 94. Valori del parametro velocità media del movimento di reaching. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei sani.
I soggetti patologici mostrano dei miglioramenti tra inizio e fine terapia: le variazioni però sono più consistenti per il soggetto P02 rispetto al soggetto P01; in realtà, dai punteggi ottenuti nell’applicazione delle scale di valutazione, P01 mostra un recupero più sostanziale, anche se inferiore a P02. Nonostante le 35 ripetizioni del movimento, la deviazione standard per i soggetti sani rimane grande.
Figura 95. Valori del parametro velocità media del movimento di reaching. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei sani.
Dalla figura 95 relativa al parametro “Numero di picchi nel profilo di velocità”, si può notare come questo parametro sottolinei la differenza tra soggetti patologici e soggetti sani. Per quanto riguarda i soggetti sani, i valori sono analoghi a quelli ricavati dall’esecuzione del
MEAN SPEED [m/s] 0 0,02 0,04 0,06 0,08 0,1 0,12 0,14 0,16 0,18 P01 P02 Healthy mean
Pre-treatment Half-treatment Post-treatment
NUMBERS OF PEAKS IN VELOCITY PROFILE
0 50 100 150 200 250 300 P01 P02 Healthy mean
movimento degli esercizi della terapia robotica in direzione Nord. Per i soggetti patologici mostrano valori inferiori rispetto alla terapia robotica a causa della minore difficoltà nell’esecuzione del singolo movimento di reaching rispetto all’esecuzione dello stesso movimento inserito all’interno dell’esercizio. Inoltre si può notare come entrambi i soggetti patologici mostrino un miglioramento durante il trattamento robotico, e come questo miglioramento sia più consistente per P01, ma migliore per P02: risultato in accordo con i punteggi ottenuti dalle scale di valutazione funzionale e dai valori del parametro efficienza.
4. 2. 3 Conclusioni
Dall’analisi cinematica, che ha preso in esame parametri quali l’accuratezza, l’efficienza, la velocità media e il numero di picchi nel profilo di velocità, è emerso che i parametri cinematici più significativi per descrivere quantitativamente l’esecuzione di un movimento con il sistema robotico MIT-Manus sono 1) l’efficienza e 2) il numero di picchi nel profilo di velocità.
L’accuratezza, infatti, non permette di differenziare in maniera netta i soggetti patologici tra loro, e i soggetti patologici dai soggetti sani. La velocità media permette la distinzione sani e patologici, ma, per questi ultimi, non mostra un andamento correlato ai punteggi delle scale di valutazione. Inoltre per quanto riguarda il parametro velocità media, si nota una grande variabilità tra i soggetti sani.
L’efficienza e il numero di picchi nel profilo di velocità, invece, mostrano andamenti simili per ciascun soggetto e categoria. Essi permettono, inoltre, di distinguere i soggetti patologici tra loro e i soggetti patologici dai soggetti sani. Per i soggetti patologici, efficienza e numero di picchi nel profilo di velocità mostrano un andamento nel tempo che riflette i punteggi ottenuti con le scale di valutazione funzionale, e, per quanto riguarda i soggetti sani, mostrano deviazioni standard minori.
L’efficienza e il numero di picchi nel profilo di velocità, quindi, sono stati scelti come parametri cinematici da mettere in correlazione con i parametri forniti dall’analisi dell’EEG.
4. 3 Risultati dell’analisi dinamica
L’analisi dinamica, eseguita modificando un programma già messo a punto in un altro lavoro di tesi, è stata applicata esclusivamente alla ripetizione del movimento di reaching. Il
movimento di reaching viene utilizzato per misurare le quantità cinematiche e dinamiche da correlare ai parametri provvisti dall’analisi del segnale EEG, registrato durante l’esecuzione del movimento.
Come descritto nel paragrafo 4. 2. 2, i soggetti sani vengono registrati una sola volta, i soggetti patologici in tre momenti diversi, corrispondenti ad inizio, metà e fine terapia. I soggetti patologici eseguono il movimento di reaching prima di effettuare l’esercizio previsto dalla terapia robotica. Tutti i soggetti eseguono 35 ripetizioni del movimento di reaching e i parametri ottenuti rappresentano il valor medio sulle 35 ripetizioni. I soggetti sani hanno eseguito gli esercizi con l’arto dominante, i soggetti patologici con l’arto emiparetico (non dominante per P01 e dominante per P02).
I parametri forniti dall’analisi dinamica sono: 1) valore massimo della forza nelle 35 ripetizioni del movimento, 2) valore medio della forza nelle 35 ripetizioni, 3) deviazione standard del valore di forza, 4) la skewness e 5) il kurthosis.
Il programma, inoltre, fornisce il grafico del cono di forza, che rappresenta il vettore forza media e le relative deviazioni per ciascuna delle 35 ripetizioni del movimento, in una finestra temporale di 1 secondo a partire dall’istante di inizio del movimento.
4. 3. 1 Risultati dell’analisi dinamica per il movimento di reaching
Di seguito vengono riportati i grafici dei vettori forza per i soggetti sani e patologici.Figura 96. Grafici dei vettori forza per ciascun soggetto sano e per la media del gruppo. In blu sono raffigurati i vettori forza esercitata in ogni ripetizione del movimento, in rosso il valore medio del vettore forza nelle 35 ripetizioni. Il grafico relativo alla media dei soggetti sani è stato ottenuto dalla media del vettore forza per ogni
ripetizione da parte dei quattro soggetti sani.
Come si può notare, i vettori forza di ciascun soggetto sano formano un cono. Il cono è visibile anche per il soggetto P02. Il soggetto P01, invece, nell’eseguire il movimento, esercita delle forze con una distribuzione molto aperta, che non si chiude a cono.
Nelle tabelle riportate di seguito vengono riportati i valori dei parametri ottenuti dall’analisi dinamica del movimento di reaching. Nelle tabelle vengono forniti separatamente i valori dei soggetti sani e di ciascun soggetto patologico
Figura 97. Coni di forza esercitati dal soggetto P01 ad inizio, metà e fine terapia
Dinamica Max Mean Std Skew Kurthosis S01 0,0132 0,0085 0,0031 -0,2076 1,8791 S02 0,0381 0,0228 0,0111 -0,4912 1,8546 S03 0,0152 0,0081 0,0033 0,2902 2,6902 S04 0,011 0,0066 0,0028 -0,179 1,6933 Media 0,019375 0,0115 0,005075 -0,1469 2,0293 Dev. standard 0,012600628 0,0075776 0,004021919 0,323684 0,448243 RSD 0,650355009 0,65892161 0,792496377 -2,20343 0,220885
Tabella 24. Valore massimo della forza (Max), valore medio della forza (Mean), deviazione standard (Std), skewness (Skew) e kurthosis (Kurthosis) per ciascun soggetto sano, relativi al movimento di reaching. Per ogni singolo soggetto, oltre ai valori dei parametri, vengono fornite la media, la deviazione standard e la dispersione
del gruppo dei soggetti sani.
P01 Max Mean Std Skew Kurtosis
Pre trattamento 0,0089 0,0028 0,0018 1,6918 5,3451 Metà trattamento 0,0087 0,0038 0,0019 0,8249 2,967
Fine trattamento 0,0172 0,0051 0,0039 1,1901 3,6924
(a)
P01-differenze Max Mean Std Skew Kurtosis
metà-pre -0,0002 0,001 0,0001 -0,8669 -2,3781 fine.metà 0,0085 0,0013 0,002 0,3652 0,7254 fine-pre 0,0083 0,0023 0,0021 -0,5017 -1,6527
(b)
Tabella 25. Valore massimo della forza (Max), valore medio della forza (Mean), deviazione standard (Std), skewness (Skew) e kurthosis (Kurthosis) relativi al movimento di reaching effettuato dal soggetto P01. Nella tabella (a) sono riportati i valori dei parametri corrispondenti al movimento di reaching eseguito all’inizio, a metà e alla fine della terapia robotica. Nella tabella (b) sono riportate per ciascun parametro le differenze nei
diversi momenti di valutazione.
P02 Max Mean Std Skew Kurtosis
Pre trattamento 0,004 0,0019 0,0007 0,6775 2,7582 Metà trattamento 0,0097 0,0033 0,0023 1,0509 3,7584 Fine trattamento 0,0095 0,0065 0,0015 0,6047 2,1104
(a)
P02-differenze Max Mean Std Skew Kurtosis
metà-pre 0,0057 0,0014 0,0016 0,3734 1,0002 fine-metà -0,0002 0,0032 -0,0008 -0,4462 -1,648 fine-pre 0,0055 0,0046 0,0008 -0,0728 -0,6478
(b)
Tabella 26. Valore massimo della forza (Max), valore medio della forza (Mean), deviazione standard (Std), skewness (Skew) e kurthosis (Kurthosis) relativi al movimento di reaching effettuato dal soggetto P02. Nella tabella (a) sono riportati i valori dei parametri corrispondenti al movimento di reaching eseguito all’inizio, a metà e alla fine della terapia robotica. Nella tabella (b) sono riportate per ciascun parametro le differenze nei
Figura 99 . Valori del parametro valore massimo della forza relativo al movimento di reaching. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei
sani.
Come si può vedere dalla figura 99, il parametro valore massimo della forza è nettamente superiore per i soggetti sani rispetto ai soggetti patologici. Entrambi i soggetti patologici mostrano, per questo parametro, un andamento crescente nel tempo. Tuttavia il soggetto P01 ha un valore massimo della forza che cade all’interno dell’intervallo dei sani già prima della terapia robotica e si mantiene in tale intervallo per tutta la durata del trattamento. P02 invece presenta un valore minore rispetto ai sani e a P01 ad inizio trattamento, che aumenta a metà e a fine trattamento. I soggetti sani inoltre presentano un’ampia deviazione standard: il valore massimo della forza, quindi, non sembrerebbe possedere le caratteristiche per descrivere l’applicazione delle forze esercitate nell’esecuzione del movimento di reaching.
Come si può vedere dalla figura 100, il valore medio della forza permette di distinguere il gruppo dei soggetti sani dai soggetti patologici. Inoltre questo parametro mostra un andamento crescente nel tempo per i soggetti patologici: essi hanno valori bassi ad inizio e a fine terapia e rientrano nell’intervallo dei soggetti sani a fine terapia. Viene mantenuta la differenza tra il soggetto P01 e P02 a fine terapia, anche se all’ inizio e a metà terapia il soggetto P01 mostra valori più vicini a quelli del gruppo dei sani rispetto a P02. Inoltre i soggetti sani mostrano, anche in questo caso, una grande deviazione standard intersoggetto. Come si può notare dalla figura 101, il parametro deviazione standard non presenta caratteristiche e andamenti che lo rendono significativo per descrivere e quantificare la forza esercitata da ciascun soggetto nel movimento di reaching.
FORCE MAX [N] 0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 P01 P02 Healthy mean
Figura 100. Valori del parametro valore medio della forza relativo al movimento di reaching. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei
sani
Infatti per quanto riguarda i soggetti patologici i valori di questo parametro nel caso di P01 mostrano un andamento monotono crescente, non visibile per P02. I valori relativi a P01 rientrano nel range dei sani già ad inizio trattamento e vi rimangono per tutto il corso della terapia, mentre P02 mostra una valore inferiore a P01 e al gruppo dei sani ad inizio terapia e rientra nel range dei sani a partire da metà terapia. Inoltre i sani presentano una grande deviazione standard tra soggetto e soggetto.
Come si può notare dalla figura 102, il parametro skewness permette una distinzione netta tra soggetti sani e soggetti patologici. Ricordando che valori negativi di questo parametro indicano che la distribuzione dei dati è spostata a sinistra del valor medio e valori positivi indicano che la distribuzione è spostata a destra, si può vedere come i soggetti sani mostrino una distribuzione prevalentemente spostata verso sinistra e i soggetti patologici verso destra. P01 mostra un andamento decrescente, ma sempre con valori positivi, tra inizio e metà terapia, e crescente tra metà e fine terapia. P02 presenta un andamento crescente tra inizio e metà terapia e decrescente, ma sempre con valori positivi, tra metà e fine terapia. Dati i due andamenti discordanti per i soggetti patologici è difficile trovare una correlazione fisiologica a questo parametro. Inoltre per questo parametro i sani hanno valor medio negativo, ma alcuni soggetti presentano valori positivi: anche per i soggetti sani quindi non è chiara la correlazione fisiologica di questo parametro. Inoltre i soggetti sani presentano una grande deviazione standard che non rende la skewness un parametro significativo per quantificare le forze esercitate durante l’esecuzione del movimento di reaching.
FORCE MEAN [N] 0 0,005 0,01 0,015 0,02 0,025 P01 P02 Healthy mean
Figura 101. Valori del parametro deviazione standard relativo al movimento di reaching. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei sani.
Figura 102. Valori del parametro skewness relativo al movimento di reaching. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei sani.
Dalla figura 103. si può notare che il parametro kurthosis permette una distinzione tra il gruppo dei soggetti sani e i soggetti patologici. Anche in questo caso, per questo parametro, i soggetti patologici mostrano andamenti nel tempo discordanti.
FORCE STD [N] 0 0,001 0,002 0,003 0,004 0,005 0,006 0,007 0,008 0,009 0,01 P01 P02 Healthy mean
Pre-treatment Half-treatment Post-treatment
SKEWNESS -0,5 0 0,5 1 1,5 2 P01 P02 Healthy mean
Figura 103. Valori del parametro kurthosis relativo al movimento di reaching. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per i soggetti patologici ed i corrispondenti valori medi dei sani
Ricordando che il valore di kurthosis per una distribuzione normale è 3, che distribuzioni con kurthosis maggiori di tre sono più sensibili agli outlier e distribuzioni con kurthosis minori di tre sono meno sensibili agli outlier, si nota che i soggetti sani sono caratterizzati da una distribuzione dei dati meno sensibile agli outlier rispetto alla distribuzione normale, mentre P01 mostra una distribuzione dei dati più sensibile agli outlier in ogni momento della terapia ad eccezione della metà della terapia dove la distribuzione delle forze esercitate mostra una distribuzione normale. Il soggetto P02 invece mostra una distribuzione delle forze esercitate meno sensibile agli outlier rispetto alla distribuzione normale, che diventa più sensibile a metà terapia, e torna meno sensibile a fine terapia rientrando nel range dei sani. I soggetti sani non mostrano una grande deviazione standard per questo parametro, così che il kurthosis potrebbe essere considerato un parametro interessante per l’analisi. Tuttavia, il particolare andamento nel tempo per i soggetti patologici e la difficile correlazione fisiologica di questo parametro, rendono necessarie ulteriori prove, non effettuate in questo lavoro di tesi, per poter considerare il kurtosis un parametro utile a quantificare le forze esercitate durante l’esecuzione del movimento di reaching.
KURTHOSIS 0 1 2 3 4 5 6 P01 P02 Healthy mean
4. 3. 2 Conclusioni
Rispetto all’analisi cinematica è più difficile individuare parametri significativi nell’analisi dinamica.
Innanzitutto per i parametri skewness e kurthosis è difficile trovare correlazioni fisiologiche al loro significato, anche a causa dell’andamento nel tempo particolare mostrato dai soggetti patologici rispetto ai soggetti sani.
Inoltre il valore massimo della forza, il valore medio della forza, la deviazione standard e la skewness presentano una grande deviazione standard per i soggetti sani.
L’analisi dinamica quindi dovrà essere studiata più approfonditamente in futuri lavori, e si dovrà incentrare sulla ricerca di ulteriori parametri al fine di quantifare le forze esercitate durante l’esecuzione del movimento di reaching.
Dalla letteratura è emerso che i soggetti con ictus hanno più difficoltà a svolgere il movimento di reaching e la forza attiva che riescono ad esercitare è minore rispetto ai soggetti sani: il parametro valor medio della forza, con il suo andamento, riflette questo comportamento quindi viene comunque scelto per indagare le correlazioni con i parametri calcolati dall’analisi del segnale EEG.
4. 4 Risultati dell’analisi del segnale EEG
Il segnale EEG è stato registrato mentre i soggetti eseguivano le 35 ripetizioni del movimento di reaching. Le registrazioni del segnale EEG si sono svolte con le stesse modalità adottate nell’ esecuzione del movimento di reaching e riportate nell’analisi cinematica e dinamica: i soggetti sani vengono registrati una singola volta, i soggetti patologici in tre momenti diversi, corrispondenti all’inizio, a metà e a fine terapia.
I soggetti patologici eseguono il movimento di reaching con registrazione del segnale EEG prima di effettuare l’esercizio previsto dalla terapia robotica. I soggetti sani hanno eseguito gli esercizi con l’arto dominante, i soggetti patologici con l’arto emiparetico (non dominante per P01 e dominante per P02).
Il gruppo di controllo per questa analisi è costituito dai soggetti sani con dominanza destra che hanno utilizzato l’ arto dominante per eseguire l’esercizio (S01, S03 e S04).
Il confronto si può effettuare soltanto con il soggetto patologico P02, perché P02 è dominante destro e svolge il movimento di reaching con l’arto emiparetico destro, mentre P01 è
dominante destro, ma svolge il movimento con l’arto emiparetico sinistro (l’arto non dominante).
L’analisi del segnale EEG permette di calcolare l’Indice di Attivazione Emisferico nella banda alfa, e i seguenti parametri relativi all’elettrodo C3: 1) durata del Bereitschaftpotential (Tbp), 2) durata (Tmpp) e 3) ampiezza di picco (Ampp) del potenziale motorio per quanto riguarda il segnale MRCP, e 4) ampiezza di picco (ERD%) e 5) durata di ERD nella banda alfa.
Nella tabella 27 viene riportata, per ciascun soggetto, la frequenza di picco nella banda alfa (fα). La banda alfa studiata per ciascun soggetto è la banda compresa tra fα-1 e fα+1.
Soggetto fα (Hz) S01 10 S02 10 S03 10,5 S04 10 P01 (pre trattamento) 7 P01 (metà trattamento) 7,5 P01 (fine trattamento) 7,5 P02 (pre trattamento) 11 P02 (metà trattamento) 10,5 P02 (fine trattamento) 10,5
Tabella 27. Valori della frequenza di picco nella banda alfa per ciascun soggetto
4. 4. 1 Indice di Attivazione Emisferico
L’indice di attivazione emisferico indica le percentuali di attivazione di ogni zona (sinistra, destra e centrale) in cui è stata suddivisa la testa durante l’esecuzione del movimento di reaching. L’indice è stato calcolato per ciascun soggetto nella propria banda alfa: per i soggetti patologici la banda alfa è individuata da fα±1, con fα corrispondente alla frequenza di
picco individuata in ogni registrazione (ad inizio trattamento, metà trattamento e fine trattamento).
L’indice di attivazione emisferico permette di individuare la dominanza dei soggetti sani e l’attivazione prevalente per i soggetti con patologia.
Le tabelle sottostanti riportano i valori dell’indice di attivazione emisferico ottenuti per ciascun soggetto.
IAE S01 S02 S03 S04 Media(S01-S03-S04) Dev. standard
Emisx 36,2841 18,2971 33,7447 34,6242 34,8843 1,2895 Emidx 25,1335 41,5275 30,8737 27,457 27,8214 2,8873 Centrale 38,2824 40,1754 35,3816 37,9187 37,1942 1,5802
Tabella 28. Indice di attivazione emisferico per l’emisfero sinistro, destro e la parte centrale del cervello. Vengono riportati i valori di ciascun soggetto e la media e la deviazione standard del gruppo dei sani dominanti
destri.
P01 EMISX EMIDX CENTRALE
Pre trattamento 23,3361 42,5955 34,0684 Metà trattamento 25,8589 44,9381 29,2031 Fine trattamento 21,2117 64,5936 14,1947
(a)
P02 EMISX EMIDX CENTRALE
Pre trattamento 46,5824 31,948 21,4696 Metà trattamento 66,88 19,6208 13,4992 Fine trattamento 66,8921 23,7499 9,3579
(b)
Tabella 29. Indice di attivazione emisferico per l’emisfero sinistro, destro e la parte centrale del cervello: (a) per il soggetto P01,(b) per il soggetto P02.
Come si può vedere dalla tabella 28 relativa ai soggetti sani, l’indice permette di individuare la dominanza: i soggetti S01, S03 e S04 sono dominanti destri e mostrano un’attivazione prevalentemente centrale-sinistra, S02 è dominante sinistro e mostra un’attivazione prevalentemente centrale-destra. Il gruppo di controllo è costituito dai soggetti S01, S03 e S04.
Di seguito sono riportati i grafici relativi all’indice di attivazione emisferico per i soggetti patologici.
Il grafico relativo a P01 (figura 104) viene riportato per mostrare l’andamento simile al soggetto P02 (figura 105). Nel grafico relativo a P01 vengono riportati sia i valori dell’indice per il gruppo di controllo (sani dominanti destri che effettuato il movimento con l’arto dominante), sia i valori di S02 (soggetto dominante sinistro che effettua il movimento con l’arto dominante): il soggetto P01 non rientra in nessuna delle due categorie dei sani perché è dominante destro ed effettua il movimento con l’arto emiparetico sinistro.
I valori dell’indice per i soggetti sani sono stati riportati per completezza ma non per un confronto, in quanto P01 richiederebbe un confronto con i soggetti sani dominanti destri che effettuano il movimento con l’arto non dominante: questa categoria non è stata prevista in questo lavoro di tesi.
Figura 104. Indice di attivazione emisferico per il soggetto P01 e per i soggetti sani.
Figura 105. Indice di attivazione emisferico per il soggetto P02 e per i soggetti sani.
Il soggetto P01 non verrà considerato per l’analisi degli altri parametri ricavati dal segnale EEG e per la ricerca delle correlazioni tra i parametri biomeccanici e quelli relativi al segnale EEG.
I grafici relativi a P01 e a P02 comunque mostrano un’attivazione ipsilesionale sempre più intensa nel corso della terapia ed una minor attivazione rispetto ai soggetti sani per la parte centrale, che diminuisce sempre più nel corso della terapia. Non solo, per quanto riguarda
P01-IAE% 0 10 20 30 40 50 60 70 1 2 3 Pre treatment Half treatment Post treatment Healthy mean S02
LEFT RIGHT CENTRAL
P02-IAE% 0 10 20 30 40 50 60 70 1 2 3 Pre treatment" Half treatment Post treatment Healthy mean CENTRAL RIGHT LEFT
l’emisfero ipsilesionale, entrambi i soggetti mostrano valori vicini al 45% ad inizio trattamento e al 65% a fine trattamento.
4. 4. 2 Risultati relativi a MRCP
I parametri relativi al Motor Cortical Related Potential ricavati dall’analisi del segnale EEG sono: la durata del Bereitschaftpotential (indicata con Tbp), la durata (indicata con Tmpp) e l’ampiezza (Ampp) del potenziale motorio all’elettrodo C3. E’ stato scelto questo elettrodo perché si trova nell’emisfero controlaterale all’arto che esegue il movimento in corrispondenza alla zona di controllo della mano della corteccia motoria.
Le tabelle 39 e 40 riportano i valori dei parametri per i soggetti sani S01, S03 e S04 e per il soggetto patologico P02 rispettivamente.
MRCP (C3) S01 S03 S04 Media sani Dev. standard
Tbp [ms] 440 630 750 550 156,31 Tmpp [ms] 30 65 130 150 50,74 Ampp [microvolts] -3,72 -1,95 -2,45 -2,75 0,91
Tabella 30. Valori dei parametri relativi a MRCP per ciascuno dei soggetti sani, per la media del gruppo e le deviazioni standard
P02 Tbp [ms] Tmpp [ms] Ampp [microvolts]
Pre trattamento 315 113 -2,41 Metà trattamento 390 190 -1,94 Fine trattamento 280 50 -1,82
Tabella 31. Valori dei parametri relativi a MRCP per P02 corrispondenti all’inizio, a metà e a fine terapia.
I grafici seguenti mostrano il confronto per ogni parametro tra P02 e il gruppo di controllo dei soggetti sani.
Dalla figura 106 si può notare che per P02 la durata del Bereitschaftpotential è minore ad inizio terapia, aumenta avvicinandosi parzialmente ai sani durante l’esecuzione dell’esercizio Clock-like durante le prime due settimane di terapia, e diminuisce durante l’esecuzione dell’esercizio Fan-like nelle ultime due settimane di terapia.
I soggetti sani non mostrano una grande deviazione standard per questo parametro.
Dalla figura 107 si nota come la durata del potenziale motorio per il soggetto P02 non mostra un andamento monotono: essa aumenta tra inizio e metà terapia e diminuisce a fine terapia.
Figura 106. Valori del parametro Tbp relativo a MRCP. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per P02 ed il valor medio dei sani
Figura 107. Valori del parametro Tmpp relativo a MRCP. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per P02 e il valor medio dei sani
Dalla figura 108 si può notare che l’ampiezza del potenziale motorio per il soggetto P02 diminuisce con andamento monotono durante il corso della terapia.
Tbp-C3 0 100 200 300 400 500 600 700 800 ms P02 Healthy
Pre-treatment Half-treatment Post-treatment
Tmpp-C3 0 20 40 60 80 100 120 140 160 180 200 ms P02 Healthy
Figura 108. Valori del parametro Ampp relativo a MRCP. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per P02 e il valor medio dei sani
4. 4. 3 Risultati relativi ad ERD
I parametri relativi ad Event Related Desynchronization ricavati dall’analisi della potenza del segnale EEG sono: 1) l’ampiezza di ERD espressa in percentuale (indicata con ERD%) e 2) la durata di ERD (indicata con durata) all’elettrodo C3.
Le tabelle seguenti riportano i valori dei parametri per i soggetti sani S01, S03 e S04 e per il soggetto patologico P02.
ERD (C3) S01 S03 S04 Media sani Dev. standard
ERD% -51 -30 -38 -39,6667 10,5987 Durata [ms] 1080 500 130 570 478,8528
Tabella 32. Valori dei parametri relativi a ERD per ciascuno dei soggetti sani, con la media del gruppo e le deviazioni standard
P02 ERD% Durata [ms]
Pre trattamento -26 470 Metà trattamento -52 1950 Fine trattamento -45 700
Tabella 33. Valori dei parametri relativi a ERD per P02 corrispondenti all’inizio, a metà e a fine terapia
I grafici seguenti mostrano il confronto tra P02 e il gruppo di controllo dei soggetti sani per ciascun parametro di ERD.
Ampp-C3 -4 -3,5 -3 -2,5 -2 -1,5 -1 -0,5 0 m ic rov ol ts P02 Healthy Pre-treatment Half-treatment Post-treatment
Figura 109. Valori del parametro ERD% relativo a ERD. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per P02 e il valor medio dei sani.
Come si può notare dalla figura 109. l’andamento del parametro ERD% all’elettrodo C3 per P02 non è monotono, ma presenta comunque un andamento di interesse.
Prima della terapia, infatti, il soggetto P02 presenta un valore di ERD% minore rispetto alla media dei sani; a metà del trattamento riabilitativo invece il valore di ERD% è superiore rispetto ai sani, come se per effetto della terapia ci fosse una maggiore attività cerebrale indotta. Questa maggiore attività si stabilizza nel corso delle ultime due settimane di terapia facendo rientrare il parametro ERD% nella media dei sani.
Come si può vedere dalla figura 110, il parametro durata di ERD non ha un andamento monotono: il valore del parametro aumenta tra inizio e metà terapia e diminuisce tra metà e fine terapia, però si presenta già all’interno dell’intervallo dei soggetti sani all’inizio del trattamento, per allontanarsi a metà e tornarvi alla fine.
Inoltre i soggetti sani presentano una grande deviazione standard all’interno del loro gruppo.
4. 4. 4 Conclusioni
L’indice di attivazione emisferico ha bisogno di essere testato su più soggetti per essere validato. Il risultato ricavato è in accordo con gli studi mediante fMRI sui soggetti con ictus. L’attivazione prevalente ipsilesionale è in accordo col fatto che i soggetti patologici che hanno preso parte allo studio sono cronici ed avevano già effettuato terapia riabilitativa tradizionale prima di sottoporsi alla terapia robotica.
ERD% -60 -50 -40 -30 -20 -10 0 P02 Healthy Pre-treatment Half-treatment Post-treatment
Figura 110. Valori del parametro durata relativo a ERD. Sono riportati i valori corrispondenti ad inizio, metà e fine terapia per P02 e il valor medio dei sani.
Negli studi in letteratura con la fMRI, infatti, è stata riscontrata un’attivazione controlesionale nei momenti immediatamente successivi all’ictus (minore eccitabilità della corteccia ipsilesionale corrisponde ad un potenziale evocato con ampiezza ridotta e latenza prolungata), ed una focalizzazione dell’attivazione nell’emisfero ipsilesionale nel tempo. I soggetti esaminati potrebbero partire già da questa condizione, dato che hanno avuto l’ictus circa un anno prima dello studio.
L’iperattivazione dell’emisfero ipsilesionale nel corso della terapia potrebbe essere spiegata con il reclutamento di tutte le aree motorie dell’emisfero lesionato dovuto alla maggiore difficoltà rispetto ai soggetti sani nello svolgimento del movimento di reaching.
L’indice ha bisogno di essere testato su un maggior numero di soggetti per confermare la sua validità. Dalla letteratura, infatti, si è visto come il recupero motorio sia correlato alla normalizzazione dell’attività cerebrale: per raggiungere questo obiettivo la terapia riabilitativa deve incentrarsi sul ripristino dell’attivazione ipsilesionale perché l’attivazione della corteccia controlesionale ha mostrato una minor efficacia nel processo di riorganizzazione e nel recupero motorio.
Secondo queste assunzioni la terapia robotica con il sistema robotico MIT-Manus si dimostra molto efficace perché stimola ed aumenta l’attivazione dell’emisfero ipsilesionale. Naturalmente quest’affermazione ha bisogno di essere supportata dalla verifica su un numero maggiore di soggetti e dalla conferma delle immagini ottenute con la fMRI, perché
ERD DURATION-C3 0 500 1000 1500 2000 2500 ms P02 Healthy
l’attivazione ipsilesionale potrebbe dipendere anche dalla condizione di partenza e dalla condizione soggettiva dei soggetti patologici.
Per quanto riguarda il Motor Cortical Related Potential, il parametro che si è dimostrato più significativo è l’ampiezza del potenziale motorio. Questo parametro non discrimina il soggetto patologico P02 dal gruppo dei sani: bisogna tenere conto però che l’informazione è parziale in quanto il parametro è estratto dall’analisi di un solo canale (C3). Presenta però un andamento con un significato fisiologico già trattato in letteratura. Il soggetto infatti potrebbe presentare un’ampiezza maggiore di MRCP all’inizio perché ha maggior difficoltà nell’eseguire il task e quindi deve impiegare maggior impegno e maggiore attenzione nello svolgere il movimento di reaching, difficoltà, attenzione ed impegno che diminuiscono progressivamente durante il corso della terapia con il recupero parziale delle abilità del soggetto.
Per quanto riguarda la durata del Bereitschaftpotential (Bp) e del Motor Potential i parametri mostrano andamenti e valori non significativi, per cui non possono essere inclusi dell’analisi delle correlazioni.
Il parametro relativo all’Event Related Desynchronization scelto per l’analisi delle correlazioni è ERD%, in quanto presenta un andamento interessante dal punto di vista fisiologico. La durata di ERD invece non può essere scelta per l’analisi delle correlazioni in quanto presenta valori non significativi per P02 e una grande deviazione standard per i soggetti sani.
I valori dei parametri scelti nell’analisi sono in accordo con i dati della letteratura.
4. 5 Correlazioni
I parametri più interessanti dell’analisi biomeccanica sono 1) l’efficienza, 2) il numero di picchi nel profilo di velocità e 3) il valore medio della forza.
I parametri più significativi nell’analisi del segnale EEG sono 1) l’ampiezza del potenziale motorio (Ampp) e 2) l’ampiezza di ERD (ERD%).
Per il soggetto P02 è stato calcolato l’indice di correlazione dei parametri più significativi provenienti dall’analisi biomeccanica e del segnale EEG, secondo la seguente formula:
dove x e y sono i valori delle serie X e Y a cui vengono sottratti i valori medi delle serie. Per prima cosa è stato calcolato l’indice di correlazione tra i due parametri forniti dall’analisi dell’EEG: l’ampiezza del potenziale motorio e dell’ERD. Poi sono state calcolate le correlazioni tra ciascuno dei parametri forniti dall’analisi del segnale EEG e i parametri forniti dall’analisi biomeccanica del movimento di reaching: si sono indagate quindi le correlazioni tra l’ampiezza del potenziale motorio e efficienza, numero di picchi nel profilo di velocità e valore medio della forza, e tra l’ampiezza di ERD e i parametri dell’analisi biomeccanica.
Nella seguente tabella sono riportati i risultati ottenuti:
ERD% AMPP EFFICIECY # PEAKS MEAN FORCE ERD% --- -0,897466 0,7969669 -0,0154251 -0,532733517
AMPP -0,8974662 --- -0,9816752 -0,4271872 0,851391579
EFFICIECY 0,7969669 -0,981675 --- 0,5916578 -0,93574541
# PEACKS -0,0154251 -0,427187 0,5916578 --- -0,837964876
MEAN FORCE -0,5327335 0,8513916 -0,9357454 -0,8379649 ---
Tabella 34. Indici di correlazione tra i diversi parametri
Come si può vedere dai risultati c’è una correlazione inversa tra l’ampiezza del potenziale motorio e l’ampiezza di ERD.
Come si vede dalla figura 111, i due parametri hanno andamenti simili e speculari.
Il parametro ERD mostra una correlazione con l’efficienza, ed una correlazione inversa con la forza media (valor medio della forza).
L’ampiezza del potenziale motorio mostra una correlazione inversa con l’efficienza e una correlazione con la forza media, in accordo con la letteratura.
Per P02 l’aumento di efficienza nello svolgere il movimento, quindi, è correlato all’aumento di ERD% e alla diminuzione dell’ampiezza del potenziale motorio. L’aumento della forza attiva, invece, è correlato alla diminuzione dell’ERD% e all’aumento dell’ampiezza del potenziale motorio.
Per quanto riguarda il parametro cinematico “numero di picchi nel profilo di velocità” rappresentante la smoothness dello svolgimento del movimento, i risultati mostrano che non c’è una correlazione con ERD%, mentre c’è una correlazione inversa con l’ampiezza del potenziale motorio.
Sembrerebbe, quindi, che il miglioramento nell’esecuzione del movimento sia legato alla diminuzione dell’ampiezza del potenziale motorio.
Figura 111. Andamenti di ERD e Ampp per il soggetto P02.
Figura 112. Andamenti dei parametri ERD, efficienza e valor medio della forza per il soggetto P02. -3 -2,5 -2 -1,5 -1 -0,5 0 1 2 3 ERD Ampp [microvolts] -0,8 -0,6 -0,4 -0,2 0 0,2 0,4 0,6 0,8 1 1,2 1,4 1 2 3 ERD EFFICIENCY-REACHING MEAN FORCE-REACHING [N]
Figura 113. Andamenti dei parametri Ampp, efficienza e valor medio della forza per il soggetto P02. -3 -2,5 -2 -1,5 -1 -0,5 0 0,5 1 1,5 1 2 3 Ampp [microvolts] EFFICIENCY-REACHING MEAN FORCE-REACHING [N]