Risultati prove meccaniche
5.1
Software utilizzato per l’analisi dei dati
Tutti i risultati delle prove meccaniche effettuate sui prototipi e sul campione umano sono stati analizzati ed interpretati utilizzando MATLAB® R2010a (abbreviazione di Matrix Laboratory); si tratta di un ambiente per il calco-lo numerico e l’analisi statistica che comprende anche l’omonimo linguaggio di programmazione creato dalla MathWorks®. MATLAB consente di mani-polare matrici, visualizzare funzioni e dati, implementare algoritmi, creare interfacce utente, e interfacciarsi con altri programmi.
5.2
Prove indentazione
5.2.1
Rampe
dito umano
Le curve forza normale-indentazione ottenute dalle prove effetuate a tre dif-ferenti velocità e a due difdif-ferenti angoli di contatto sul campione umano di riferimento (dito indice mano destra), con dati filtrati, sono mostrate nelle figure 5.1e 5.3, i relativi cicli di isteresi, con dati filtrati, sono mostrati nelle figure 5.2 e 5.4, infine i valori ottenuti per i parametri m e b in seguito al fittaggio delle curve con la funzione (4.6) sono mostrati nella tabella 5.1 (NO-TA: il filtraggio dei dati è stato effettuato con un filtro a media mobile, mentre il fitting dei dati è stato effettuato ricorrendo all’algoritmo lsqcurvefit). Tali risultati hanno mostrato che:
0 0.5 1 1.5 0 100 200 300 400 500 600 700 indentazione [mm] Forza normale [mN] 0.1 mm/sec 0.5 mm/sec 2 mm/sec
Figura 5.1: curve forza normale-indentanzione con angolo di contatto pari a 20°, con
barre di errore 0 0.5 1 1.5 0 100 200 300 400 500 600 700 indentazione [mm] Forza normale [mN] 0.1 mm/sec 0.5 mm/sec 2 mm/sec
0 0.5 1 1.5 0 200 400 600 800 1000 indentazione [mm] Forza normale [mN] 0.1 mm/sec 0.5 mm/sec 2 mm/sec
Figura 5.3: curve forza normale-indentanzione con angolo di contatto pari a 30°, con
barre di errore 0 0.5 1 1.5 0 200 400 600 800 1000 indentazione [mm] Forza normale [mN] 0.1 mm/sec 0.5 mm/sec 2 mm/sec
Tabella 5.1: parametri m e b dito umano
Angolo velocità parametro m parametro b sse
di contatto (mm/sec) (N/mm) (mm−1) 20° 0.1 6.32 ∗ 10−5 ± 4.55 ∗ 10−6 1.719±0.085 0.007± 0.001 0.5 7.2 ∗ 10−5 ± 4.56 ∗ 10−6 1.769±0.072 0.016±0.011 2 8.77 ∗ 10−5 ± 1.68 ∗ 10−5 1.776±0.219 0.027±0.013 30° 0.1 9.47 ∗ 10−5 ± 4.6 ∗ 10−6 1.694±0.076 0.015±0.001 0.5 9.53 ∗ 10−5 ± 4.94 ∗ 10−6 1.806±0.081 0.022±0.012 2 1.46 ∗ 10−4 ± 1.1 ∗ 10−5 1.637±0.045 0.047±0.026 letteratura[16] 60 0.19 2.1 N.D.
Tabella 5.2: parametri d’isteresi relativi al dito umano
Angolo velocità Energia Isteresi Energia
di contatto (mm/sec) in ingresso(N · mm) (N · mm) dissipata (%) 20° 0.10.5 0.237± 0.0080.204±0.015 0.112± 0.0020.082±0.01 47.1± 2.440±2.4
2 0.28± 0.011 0.138± 0.008 49.4± 3.4 30° 0.10.5 0.321±0.0060.3±0.005 0.158± 0.0030.137±0.010 45.8±4.249.2±3.7
0 0.5 1 1.5 2 0 500 1000 1500 2000 Indentazione (mm) Forza Normale (mN) 0.1 mm/sec 1 mm/sec 10 mm/sec
Figura 5.5: curve forza normale-indentanzione per primo prototipo con EcoFlex 0010 con
angolo di contatto pari a 10°, con barre di errore
• la relazione tra la forza normale di contatto e il livello di indentazione applicato è di tipo non-lineare, dato ampiamente mostrato in tutta la letteratura precedente.
• il valore di forza normale cresce all’aumentare della velocità di inden-tazione
• il valore di forza normale cresce all’aumentare dell’angolo che intercorre tra l’asse della falange distale e il piano d’indentazione.
• il fenomeno d’isteresi cresce all’aumentare della velocità d’indentazione e dell’angolo di contatto(vedi grafici 5.2 e 5.4, tabella 5.2)
• i valori di b ottenuti sono comparabili a quelli presenti in letteratura, mentre quelli di m risultano minori di alcuni ordini di grandezza, ciò è dovuto alla velocità elevata, alla differente geometria e alle differenti condizioni di contatto delle prove presenti in letteratura [16].
• in base ai valori di sse ottenuti si può affermare che il modello di Fung rappresenta una buona approssimmazione per l’andamento della curva forza normale-indentazione
0 0.5 1 1.5 2 0 500 1000 1500 2000 indentazione [mm] Forza normale [mN] 0.1 mm/sec 0.5 mm/sec 2 mm/sec
Figura 5.6: curve di istersi forza normale-indentanzione per primo prototipo con EcoFlex
0010 con angolo di contatto pari a 10°
0 0.5 1 1.5 2 0 500 1000 1500 2000 Indentazione (mm) Forza Normale (mN) 0.1 mm/sec 1 mm/sec 10 mm/sec
Figura 5.7: curve forza normale-indentanzione per primo prototipo con EcoFlex 0030 con
0 0.5 1 1.5 2 0 500 1000 1500 2000 2500 indentazione [mm] Forza normale [mN] 0.1 mm/sec 1 mm/sec 10 mm/sec
Figura 5.8: curve di istersi forza normale-indentanzione per primo prototipo con EcoFlex
0030 con angolo di contatto pari a 10°
Tabella 5.3: parametri m e b primo prototipo
PAD velocità parametro m parametro b sse
(mm/sec) (N/mm) (mm−1) 1 0.1 6.30 ∗ 10−5 ± 5.4 ∗ 10−6 1.557±0.006 0.322±0.009 1 7.82 ∗ 10−5 ± 2.08 ∗ 10−7 1.533±0.002 0.565±0.011 10 1.75 ∗ 10−5 ± 4.42 ∗ 10−6 0.963 ±0.015 0.980±0.11 2 0.1 8.69 ∗ 10−5 ± 6.19 ∗ 10−6 1.631 ±0.043 0.081±0.021 1 8.38 ∗ 10−5 ± 1.41 ∗ 10−6 1.683±0.010 0.144±0.053 10 9.43 ∗ 10−5 ± 1.38 ∗ 10−6 1.667±0.058 0.775±0.247 letteratura[16] 60 0.19 2.1 N.D.
Tabella 5.4: parametri d’isteresi relativi al primo prototipo
PAD velocità Energia Isteresi Energia
(mm/sec) in ingresso(N · mm) (N · mm) dissipata (%) 1 0.11 0.911± 0.0050.785±0.003 0.325± 0.0030.201±0.005 35.6± 0.225.6±0.6
10 0.873± 0.111 0.291± 0.087 32.9± 6.5 2 0.11 1.197±0.0211.177±0.014 0.091±0.0090.119± 0.01 7.6±0.610±0.9
primo prototipo
Del primo protipo sono state realizzate due versioni che d’ora in avanti avranno la seguente nomenclatura:
• PAD-1 : primo prototipo, strato interno EcoFlex 0010, strato esterno DragonSkin 10.
• PAD-2 : primo prototipo, strato interno EcoFlex 0030, strato esterno DragonSkin 10.
Come abbiamo visto e motivato nel paragafo 4.3.1 le prove d’indentazione effettuate sul primo prototipo sono state effettuate a condizioni differenti di velocità e di livello massimo d’indentazione raggiunto rispetto a tutti i pro-totipi successivi. Le curve forza normale-indentazione ottenute dalle prove effettuate a tre differenti velocità con 10° come angolo di contatto, con dati interpolati tra 0 e 2mm e filtrati, sono mostrati nelle figure 5.5e 5.7, i relativi cicli di isteresi,con dati filtrati, sono mostrati nelle figure 5.6 e 5.8.(NOTA: l’interpolazione è stata effettuata utilizzando la funzione interp1 mentre il filtraggio è stato effettuato con un filtro a media mobile). I risultati hanno mostrato, analogamente alle prove su dito umano, che:
• la relazione tra la forza normale di contatto e il livello di indentazione applicato è non-lineare per entrambi i PAD e i valori di forza raggiunti sono comparabili con quelli ottenuti sul campione umano di riferimento • i valori di forza massimi risultano maggiori nel PAD-2
• il valore di forza normale massimo per entrambi i PAD cresce all’au-mentare della velocità di indentazione
• il fenomeno d’isteresi cresce all’aumentare della velocità d’indentazio-ne(vedi grafici 5.6 e 5.6, tabella 5.4)
• i valori di energia dissipata nel PAD-1 risultano comparabili con quelli ottenuti nel campione umano di riferimento, cosa che non si verifica per il PAD-2 dove i valori sono molto bassi (vedi tabella 5.4)
• i valori di m e b ottenuti sono comparabili per entrambi i PAD a quelli del dito umano (vedi tabella 5.1 e 5.3)
prototipi successivi
Per tutti i prototipi sucecesivi al primo le condizioni in cui sono state effettua-te le prove definieffettua-te rampe sono identiche a quelle utilizzaeffettua-te per il campione umano così da rendere confrontabili i risultati ottenuti, eccetto che per il livello massimo d’indentazione del secondo prototipo avente come struttura rigida interna la prima versione, cosa motivata nel paragrafo 4.3.1. Segue l’elenco dei prototipi con la nomenclatura che utilizzaremo d’ora in avanti in qualsiasi contesto per riferirci a questi:
• PAD1-a: secondo prototipo con prima versione struttura rigida inter-na, strato interno EcoFlex 0010, strato esterno DragonSkin 10.
• PAD1-b: secondo prototipo con prima versione struttura rigida inter-na, strato interno EcoFlex 0030, strato esterno DragonSkin 10.
• PAD1-A: secondo prototipo con seconda versione struttura rigida interna, strato interno EcoFlex 0010, strato esterno DragonSkin 10. • PAD1-B: secondo prototipo con seconda versione struttura rigida
interna, strato interno EcoFlex 0030, strato esterno DragonSkin 10. • PAD2-A: terzo prototipo, strato interno EcoFlex 0010, strato esterno
DragonSkin 10.
• PAD2-B: terzo prototipo, strato interno EcoFlex 0030, strato esterno DragonSkin 10.
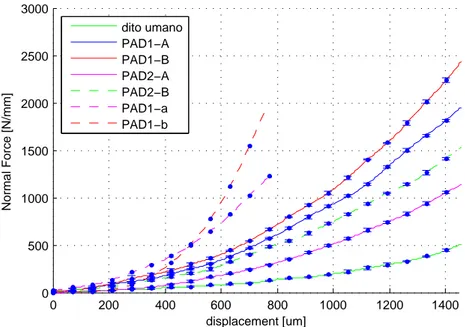
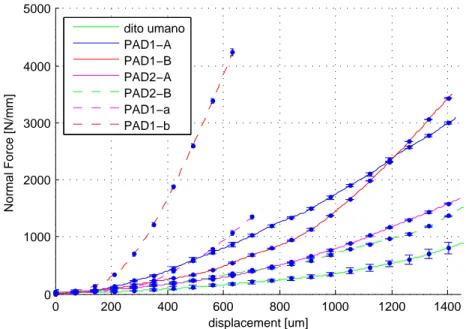
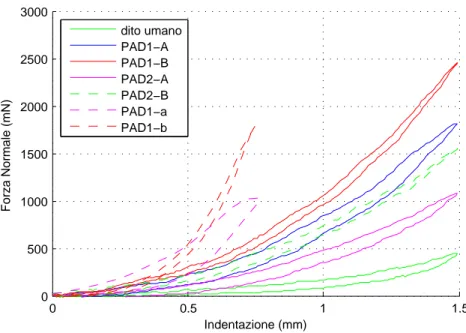
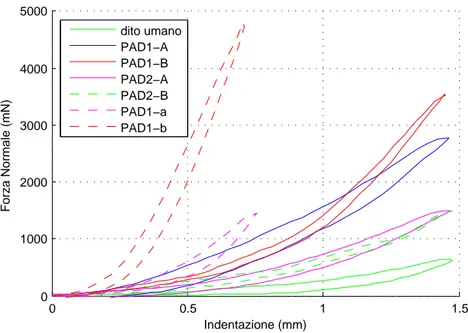
Nei sei grafici mostrati (vedi figure 5.9,5.10,5.11,5.9,5.13,5.14) vengono messe a confronto le curve forza normale-indentazione relative a tutti i pro-totipi e al campione umano di riferimento alle tre differenti velocità di inden-tazione ed ai due differenti angoli di contatto scelti,vengono, poi, mostrati i relativi cicli di isteresi e i parametri energetici ad essi associati ( vedi figure 5.15,5.16,5.17,5.18,5.19,5.20 e le tabelle 5.7 e 5.8 ). Per maggiore chiarezza vengono mostrate due tabelle in cui sono messe in evidenza i valori di forza raggiunti a 0.5, 1e1.25mm con le relative deviazioni standard (vedi tabelle 5.5 e 5.6) Vengono infine mostrati, nelle tabelle 5.9 e 5.10, i parametri m e b, con le relative deviazioni standard, ricavati dal fittaggio sui dati del modello presentato nell’equazione (4.6). Una valutazione complessiva di tutti i valori ricavati dall’analisi delle rampe ha condotto alle seguenti conclusioni
• in tutti i prototipi sottoposti a prova d’indentazione a velocità costan-te l’andamento della curva forza normale-indentazione è non lineare analogamente a quanto accade per il dito umano
• in tutti i prototipi un aumento della velocità di indentazione corrispon-de ad un aumento corrispon-della stiffness
• in tutti i prototipi un aumento dell’angolo di contatto corrisponde ad un aumento della stiffness, eccetto per il PAD-2B dove all’aumentare dell’angolo di contatto la rigidezza rimane pressochè invariata
• in tutti i prototipi un aumento della velocità di indentazione corrispon-de ad un più evicorrispon-dente fenomeno d’isteresi e quindi ad un maggior livello di energia dissipata
• in tutti i prototipi i parametri m e b risultano essere comparabili con quelli del riferimento umano eccetto che per i PAD-1a e PAD-1b • considerando come parametri fondamentali di comparazione dei
proto-tipi con il riferimento umano: – forza massima raggiunta – energia dissipata
– parametri m e b
il prototipo che risulta il migliore è sicuramente il PAD-2A.
5.2.2
Ramp-hold
dito umano
Nei grafici presentati nelle figure 5.21 e 5.23 viene mostrato l’andamento della curva forza normale-tempo relativo al campione umano analizzato allo scopo di studiarne il fenomeno di rilassamento, infatti, questo è stato portato ad un livello massimo d’indentazione che è il medesimo delle rampe, ovvero 1.5mm ad una velocità di 1mm/sec, ed è stato poi tenuto stabile a tale livello per 30sec. Nei grafici presenti nelle figure 5.22 e 5.24) vengono, invece, mostrate la curve ottenute fittando i dati mediati delle varie prove, con il modello presentato nelle equazioni (4.8) e (4.9) al terzo ordine, utilizzando lsqcurvefit come algoritmo per l’individuazione dei parametri in ambiente MATLAB. Iterando il processo di calcolo dei parametri per il fittaggio dei dati, non si ottengono sempre i medesimi valori per tutti i parametri. Quest’aspetto viene messo in evidenza nella tabella presentata di seguito (vedi tabella 5.11) dove viene riportato il valore dei paramtetri con il relativo valore di deviazione standard. Nella tabella sono presenti i valori relativi alle prove con angolo di contatto pari a 20° e 30° e viene riportato anche il valore dei parametri
0 0.5 1 1.5 0 500 1000 1500 2000 2500 3000 Indentazione (mm) Forza normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.9: curve forza normale-indentanzione con angolo di contatto pari a 20° e velocità
di indentazione 0.1 mm/sec, con barre di errore
0 200 400 600 800 1000 1200 1400 0 500 1000 1500 2000 2500 3000 displacement [um] Normal Force [N/mm] dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.10: curve forza normale-indentanzione con angolo di contatto pari a 20° e velocità
0 200 400 600 800 1000 1200 1400 0 500 1000 1500 2000 2500 3000 displacement [um] Normal Force [mN] dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.11: curve forza normale-indentanzione con angolo di contatto pari a 20° e velocità
di indentazione 2 mm/sec, con barre di errore
0 0.5 1 1.5 0 1000 2000 3000 4000 5000 6000 Indentazione (mm) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.12: curve forza normale-indentanzione con angolo di contatto pari a 30° e velocità
0 500 1000 1500 0 1000 2000 3000 4000 5000 displacement [um] Normal Force [N/mm] dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.13: curve forza normale-indentanzione con angolo di contatto pari a 30° e velocità
di indentazione 0.5 mm/sec, con barre di errore
0 200 400 600 800 1000 1200 1400 0 1000 2000 3000 4000 5000 displacement [um] Normal Force [N/mm] dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.14: curve forza normale-indentanzione con angolo di contatto pari a 30° e velocità
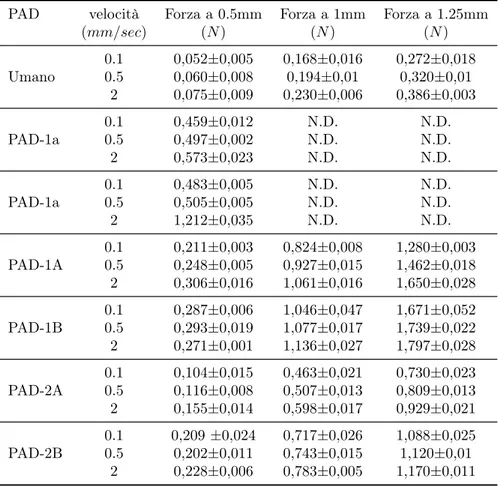
Tabella 5.5: valori di forza con deviazioni standard per tutti i prototipi confrontati con
il campione umano di riferimento, con angolo di contatto di 20°
PAD velocità Forza a 0.5mm Forza a 1mm Forza a 1.25mm
(mm/sec) (N ) (N ) (N ) Umano 0.10.5 0,052±0,0050,060±0,008 0,168±0,0160,194±0,01 0,272±0,0180,320±0,01 2 0,075±0,009 0,230±0,006 0,386±0,003 PAD-1a 0.10.5 0,459±0,0120,497±0,002 N.D.N.D. N.D.N.D. 2 0,573±0,023 N.D. N.D. PAD-1a 0.10.5 0,483±0,0050,505±0,005 N.D.N.D. N.D.N.D. 2 1,212±0,035 N.D. N.D. PAD-1A 0.10.5 0,211±0,0030,248±0,005 0,824±0,0080,927±0,015 1,280±0,0031,462±0,018 2 0,306±0,016 1,061±0,016 1,650±0,028 PAD-1B 0.10.5 0,287±0,0060,293±0,019 1,046±0,0471,077±0,017 1,671±0,0521,739±0,022 2 0,271±0,001 1,136±0,027 1,797±0,028 PAD-2A 0.10.5 0,104±0,0150,116±0,008 0,463±0,0210,507±0,013 0,730±0,0230,809±0,013 2 0,155±0,014 0,598±0,017 0,929±0,021 PAD-2B 0.10.5 0,209 ±0,0240,202±0,011 0,717±0,0260,743±0,015 1,088±0,0251,120±0,01 2 0,228±0,006 0,783±0,005 1,170±0,011
Tabella 5.6: valori di forza con deviazioni standard per tutti i prototipi confrontati con
il campione umano di riferimento, con angolo di contatto di 30°
PAD velocità Forza a 0.5mm Forza a 1mm Forza a 1.25mm
(mm/sec) (N ) (N ) (N ) Umano 0.10.5 0,060±0,0020,057±0,008 0,247±0,0030,268±0,01 0,400±0,0050,449±0,01 2 0,118±0,030 0,352±0,033 0,588±0,072 PAD-1a 0.10.5 0,515±0,0030,564±0,03 N.DN.D N.DN.D 2 0,574±0,015 N.D N.D PAD-1a 0.10.5 2,496±0,0472,510±0,13 N.DN.D N.DN.D 2 2,604±0,042 N.D N.D PAD-1A 0.10.5 0,439±0,0370,449±0,037 1,391±0,0121,527±0,027 2,030±0,0382,252±0,038 2 0,595±0,041 1,734±0.029 2,535±0,023 PAD-1B 0.10.5 0.326±0.0160.332±0.007 1.345±0.0311,381±0.002 2.450±0.0332.523±0.006 2 0.342±0.009 1.421±0.007 2.591±0.002 PAD-2A 0.10.5 0,169±0,0150,186±0,007 0,643±0,0190,705±0,017 1,028±0,0191,133±0,011 2 0,224±0,011 0,789±0,016 1,270±0,009 PAD-2B 0.10.5 0,225±0,0150,239±0,002 0,650±0,0270,660±0,016 0,956±0,0250,967±0,011 2 0,243±0,020 0,705±0,011 1,026±0,015
0 0.5 1 1.5 0 500 1000 1500 2000 2500 3000 Indentazione (mm) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.15: curve isteresi forza normale-indentanzione con angolo di contatto pari a 20°
e velocità di indentazione 0.1 mm/sec
0 0.5 1 1.5 0 500 1000 1500 2000 2500 3000 Indentazione (mm) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.16: curve isteresi forza normale-indentanzione con angolo di contatto pari a 20°
0 0.5 1 1.5 0 500 1000 1500 2000 2500 3000 Indentazione (mm) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.17: curve isteresi forza normale-indentanzione con angolo di contatto pari a 20°
e velocità di indentazione 2 mm/sec
0 0.5 1 1.5 0 1000 2000 3000 4000 5000 Indentazione (mm) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.18: curve isteresi forza normale-indentanzione con angolo di contatto pari a 30°
0 0.5 1 1.5 0 1000 2000 3000 4000 5000 Indentazione (mm) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.19: curve isteresi forza normale-indentanzione con angolo di contatto pari a 30°
e velocità di indentazione 0.5 mm/sec
0 0.5 1 1.5 0 1000 2000 3000 4000 5000 Indentazione (mm) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.20: curve isteresi forza normale-indentanzione con angolo di contatto pari a 30°
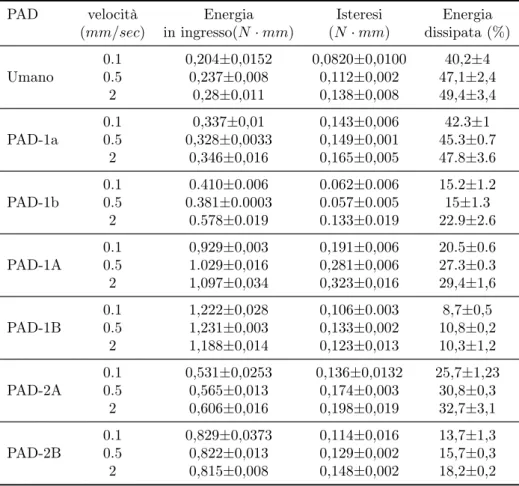
Tabella 5.7: parametri d’isteresi relativi a tutti i prototipi confrontati con il riferimento
umano, con angolo di contatto pari a 20°
PAD velocità Energia Isteresi Energia
(mm/sec) in ingresso(N · mm) (N · mm) dissipata (%) Umano 0.10.5 0,204±0,01520,237±0,008 0,0820±0,01000,112±0,002 47,1±2,440,2±4 2 0,28±0,011 0,138±0,008 49,4±3,4 PAD-1a 0.10.5 0,328±0,00330,337±0,01 0,143±0,0060,149±0,001 45.3±0.742.3±1 2 0,346±0,016 0,165±0,005 47.8±3.6 PAD-1b 0.10.5 0.381±0.00030.410±0.006 0.062±0.0060.057±0.005 15.2±1.215±1.3 2 0.578±0.019 0.133±0.019 22.9±2.6 PAD-1A 0.10.5 0,929±0,0031.029±0,016 0,191±0,0060,281±0,006 20.5±0.627.3±0.3 2 1,097±0,034 0,323±0,016 29,4±1,6 PAD-1B 0.10.5 1,222±0,0281,231±0,003 0,106±0.0030,133±0,002 10,8±0,28,7±0,5 2 1,188±0,014 0,123±0,013 10,3±1,2 PAD-2A 0.10.5 0,531±0,02530,565±0,013 0,136±0,01320,174±0,003 25,7±1,2330,8±0,3 2 0,606±0,016 0,198±0,019 32,7±3,1 PAD-2B 0.10.5 0,829±0,03730,822±0,013 0,114±0,0160,129±0,002 13,7±1,315,7±0,3 2 0,815±0,008 0,148±0,002 18,2±0,2
Tabella 5.8: parametri d’isteresi relativi a tutti i prototipi confrontati con il riferimento
umano, con angolo di contatto pari a 30°
PAD velocità Energia Isteresi Energia
(mm/sec) in ingresso(N · mm) (N · mm) dissipata (%) Umano 0.10.5 0,300±0,0050.320±0,006 0.158± 0.0120,137±0,010 45.8±4.249.2±3.5 2 0.414±0.051 0.214±0.021 51.7±2.1 PAD-1a 0.10.5 0.410±0.0530.375±0.022 0.120±0.0340.112±0.009 29±4.329.8±1 2 0.335±0.009 0.089±0.015 26.4±3.9 PAD-1b 0.10.5 0.410±0.0051.187±0.015 0.062±0.0060.264±0.003 15.2±0.01222.2±0.1 2 0.923±0.113 0.781±0.003 15.3±0.7 PAD-1A 0.10.5 1.548±0.0421.678±0.024 0.437±0.0010.296±0.01 19.1±0.0426±0.3 2 1.735±0.028 0.563±0.012 32.4 ±0.8 PAD-1B 0.10.5 1.660±0.0301.610±0.008 0.166±0.0320.157±0.007 9.7±0.310±1.7 2 1.479±0.004 0.153±0.004 10.4±0.2 PAD-2A 0.10.5 0.757±0.0210.794±0.012 0.184±0.0080.233±0.002 24.3±0.429.3±0.2 2 0.832±0.008 0.279±0.004 33.5±0.4 PAD-2B 0.10.5 0.775±0.0360.757±0.007 0.124±0.0130.137±0.004 15.9±0.918.1±0.4 2 0.768±0.008 0.169±0.012 21.9±1.7
Tabella 5.9: parametri m e b di tutti i prototipi confrontati con riferimento umano, con
angolo di contatto pari a 20°
PAD velocità parametro m parametro b sse
(mm/sec) (N/mm) (mm−1) Umano 0.1 6.32 ∗ 10−5 ± 4.55 ∗ 10−6 1.719±0.085 0.007± 0.001 0.5 7.2 ∗ 10−5 ± 4.56 ∗ 10−6 1.769±0.072 0.016±0.011 2 8.77 ∗ 10−5 ± 1.68 ∗ 10−5 1.776±0.219 0.027±0.013 PAD-1a 0.1 4.57 ∗ 10−4 ± 1.63 ∗ 10−5 2.681±0.052 0.012± 0.004 0.5 5.06 ∗ 10−4 ± 5.48 ∗ 10−7 2.605±0.006 0.012±0.003 2 5.94 ∗ 10−4 ± 3.99 ∗ 10−5 2.516±0.107 0.017±0.006 PAD-1b 0.1 5.83 ∗ 10−4 ± 3.07 ∗ 10−6 3±0.001 2.24± 0.024 0.5 5.86 ∗ 10−4 ± 6.86 ∗ 10−7 3±0.001 2.077±0.033 2 1.13 ∗ 10−3 ± 2.1 ∗ 10−5 3±0.001 1.040±0.113 PAD-1A 0.1 3.39 ∗ 10−4 ± 2.49 ∗ 10−6 1.519±0.010 0.209± 0.019 0.5 4.03 ∗ 10−4 ± 8.76 ∗ 10−6 1.453±0.019 0.205±0.023 2 4.96 ∗ 10−4 ± 2.31 ∗ 10−5 1.364±0.043 0.174±0.031 PAD-1B 0.1 4.4 ∗ 10−4 ± 1.28 ∗ 10−5 1.532±0.009 0.197± 0.056 0.5 4.48 ∗ 10−4 ± 6.46 ∗ 10−6 1.558±0.026 0.167±0.071 2 4.46 ∗ 10−4 ± 2.17 ∗ 10−6 1.608±0.007 0.231±0.019 PAD-2A 0.1 1.78 ∗ 10−4 ± 1.61 ∗ 10−5 1.620±0.072 0.083± 0.005 0.5 1.93 ∗ 10−4 ± 7.83 ∗ 10−6 1.653±0.030 0.104±0.004 2 2.39 ∗ 10−4 ± 1.31 ∗ 10−5 1.566±0.045 0.126±0.032 PAD-2B 0.1 3.48 ∗ 10−4 ± 2.98 ∗ 10−5 1.286±0.078 0.093± 0.016 0.5 3.45 ∗ 10−4 ± 7.94 ∗ 10−6 1.345±0.017 0.119±0.023 2 3.66 ∗ 10−4 ± 7.39 ∗ 10−6 1.341±0.038 0.100±0.037
Tabella 5.10: parametri m e b di tutti i prototipi confrontati con riferimento umano, con
angolo di contatto pari a 30°
PAD velocità parametro m parametro b sse
(mm/sec) (N/mm) (mm−1) Umano 0.1 9.47 ∗ 10−5 ± 4.6 ∗ 10−6 1.694±0.076 0.015±0.001 0.5 9.53 ∗ 10−5 ± 4.94 ∗ 10−6 1.806±0.081 0.022±0.012 2 1.46 ∗ 10−4 ± 1.1 ∗ 10−5 1.637±0.045 0.047±0.026 PAD-1a 0.1 5.42 ∗ 10−4 ± 6.41 ∗ 10−5 2.934±0.092 0.326±0.139 0.5 5.29 ∗ 10−4 ± 1.84 ∗ 10−5 3±0.001 0.364±0.106 2 5.41 ∗ 10−4 ± 1.07 ∗ 10−5 3±0.001 0.473±0.074 PAD-1b 0.1 2.27 ∗ 10−3 ± 2.13 ∗ 10−4 2.721±0.182 3.497±0.042 0.5 2.11 ∗ 10−3 ± 2.29 ∗ 10−5 3±0.001 3.172±0.135 2 2.23 ∗ 10−3 ± 1.95 ∗ 10−5 3±0.001 3.222±0.065 PAD-1A 0.1 7.51 ∗ 10−4 ± 3.88 ∗ 10−5 1.107±0.047 0.517±0.035 0.5 8.55 ∗ 10−4 ± 2.91 ∗ 10−5 1.065±0.032 0.633±0.057 2 9.75 ∗ 10−4 ± 3.16 ∗ 10−5 1.041±0.033 0.639±0.061 PAD-1B 0.1 4.55 ∗ 10−4 ± 1.85 ∗ 10−5 1.918±0.036 0.633±0.050 0.5 4.46 ∗ 10−4 ± 5.04 ∗ 10−7 1.983±0.003 0.501±0.014 2 4.37 ∗ 10−4 ± 4.81 ∗ 10−7 2.055±0.001 0.367±0.038 PAD-2A 0.1 2.63 ∗ 10−4 ± 1.65 ∗ 10−5 1.555±0.055 0.095±0.006 0.5 2.86 ∗ 10−4 ± 9.33 ∗ 10−6 1.565±0.029 0.105±0.004 2 3.26 ∗ 10−4 ± 7.99 ∗ 10−6 1.550±0.029 0.096±0.011 PAD-2B 0.1 3.03 ∗ 10−4 ± 2.62 ∗ 10−5 1.368±0.076 0.075±0.030 0.5 3.08 ∗ 10−4 ± 5.53 ∗ 10−6 1.373±0.015 0.103±0.007 2 3.53 ∗ 10−4 ± 1.03 ∗ 10−5 1.255±0.031 0.072±0.010
Tabella 5.11: parametri m,b,ci e vi del campione umano, con due differenti angoli di contatto parametro 20° 30° letteratura (20°-40°) m 0,322±0.132 0.054±0.017 0.092 (mm−1) b 1,692±0 2.095±0 3.200 (N/mm) v0 0±0 0±0 0 sec−1 c0 0,225±0.076 0.719±0.243 0.22 (adim.) v1 0,965±0 0.983±0 0.66 sec−1 c1 0,147±0.050 0.555±0.187 0.18 (adim.) v2 178,417±13.946 99.959±0.001 253 sec−1 c2 0±0 1.782±0.602 0.45 (adim.) sse 0.641±0 0.172±0 N.D.
(sum of square error)
presenti in letteratuta [16]. Ciò che si può mettere in evidenza da tali prove è quanto segue:
• il fenomeno di rilassamento atteso è evidente con entrambi gli angoli di contatto utilizzati
• il modello di riferimento riesce a fittare bene i dati delle prove speri-mentali (vedi anche valori di sse riportati nella tabella 5.11)
• il modello di riferimento non tiene conto dell’angolo di contatto e della specifica geometria del soggetto analizzato, questo comporta chiara-mente una differenza dei parametri individuati del modello sia tra 20° e 30° sia, naturlamente, rispetto al riferimento prensete in letteratura. Tale modello può essere quindi utilizzato confrontando sistemi artificiali con sistemi biologici sottoposti alle medesime condizioni di contatto.
0 5 10 15 20 25 30 0 100 200 300 400 500 600 tempo [sec] Forza Normale [mN]
Figura 5.21: curva forza normale-tempo,con angolo di contatto pari a 20°
0 5 10 15 20 25 30 0 100 200 300 400 500 600 tempo [sec] Forza Normale [mN]
Figura 5.22: fittaggio con modello della curva media forza normale-tempo,con angolo di
0 5 10 15 20 25 30 0 100 200 300 400 500 600 tempo [sec] Forza Normale [mN]
Figura 5.23: curva forza normale-tempo,con angolo di contatto pari a 30°
0 5 10 15 20 25 30 0 100 200 300 400 500 600 tempo [sec] Forza Normale [mN]
Figura 5.24: fittaggio con modello della curva media forza normale-tempo,con angolo di
prototipi artificiali
Nel grafici presentati nelle figure 5.25 e 5.27 viene mostrato l’andamento della curva forza normale-tempo relativo a tutti i prototipi artificiali (eccetto il pri-mo) confrontati con il campione umano , allo scopo di studiarne il fenomeno di rilassamento; infatti, in ciascun prototipo sono state attuate le stesse pro-cedure sperimentali attuate per il campione umano, ovvero sono stati portati ad un livello massimo d’indentazione che è il medesimo delle rampe, ovvero 1.5mm ad una velocità di 1mm/sec (eccetto per i PAD-1a e 1b dove il livello massimo di indentazione è stato 0.8mm, analogamente a quanto fatto nelle rampe), e sono stati poi tenuti stabili a tale livello per 30sec. Nei grafici nelle figure 5.26 5.28 vengono, invece, mostrate la curve ottenute fittando i dati mediati delle varie prove, con il modello presentato nelle equazioni (4.8) e (4.9) al terzo ordine, utilizzando lsqcurvefit come algoritmo per l’individua-zione dei parametri in ambiente MATLAB. Ferme restando le considerazioni fatte nel sezione precedente circa l’individuazione dei parametri del modello, nelle tabelle 5.12 e 5.13 vengono riportati i valori di quest’ultimi con relativa deviazione standard. I risultati di tali prove hanno condotto alle seguenti considerazioni:
• in tutti i prototipi realizzati, condotti ad un certo livello di indentazione è tenuti a questo livello per un certo tempo, è presente un fenomeno di rilassamento, analogamente a quanto accade per il dito umano
• il modello utilizzato per descrivere il fenomeno di rilassamento per il dito umano, identificabile nell’equazione (4.9), è utilizzabile anche per i prototipi realizzati, con un valore di sse che ha il suo valore minimo per i PAD-2A e 2B , ed il suo valore massimo per i PAD-1a e 1-b. • tenendo conto dei valori massimi di forza normale raggiunti e del
va-lore dei parametri individuati dal fittaggio dei dati, il prototipo che esibisce il comportamento più simile a quello del riferimento umano è certamente il PAD-2A.
5.2.3
Analisi area di contatto
Nella figure 5.29 e 5.30 vengono mostrate le impronte d’inchiostro lasciate dal dito umano e dai prototipi selezionati (PAD-2A e 2B) . In prima battuta è stata effettuata una misura manuale delle aree ottenendo i risultati mostrati nella tabella 5.14. Successivamente le immagini sono state elaborate in am-biente MATLAB, in particolare sono state effettuate le seguente operazione sulle matrici delle immagini:
0 0.5 1 1.5 2 2.5 3 0 500 1000 1500 2000 2500 3000 3500 4000 tempo (sec) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.25: curva forza normale-tempo,con angolo di contatto pari a 20°
0 0.5 1 1.5 2 2.5 3 0 500 1000 1500 2000 2500 3000 3500 4000 tempo (sec) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.26: fittaggio con modello delle curve medie forza normale-tempo,con angolo di
0 0.5 1 1.5 2 2.5 3 0 1000 2000 3000 4000 5000 6000 tempo (sec) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.27: curva forza normale-tempo,con angolo di contatto pari a 30°
0 0.5 1 1.5 2 2.5 3 0 1000 2000 3000 4000 5000 6000 tempo (sec) Forza Normale (mN) dito umano PAD1−A PAD1−B PAD2−A PAD2−B PAD1−a PAD1−b
Figura 5.28: fittaggio con modello delle curve media forza normale-tempo,con angolo di
T ab ella 5.12: parametri m,b, v0 e c0 del campione umano e di tutti iprototipi, con due differen ti angoli di con tatto PAD m b v0 c0 20 ° 30 ° 20 ° 30 ° 20 ° 30 ° 20 ° 30 ° Umano 0,322 ± 0.132 0.054 ± 0.017 1,692 ± 0 2.095 ± 0 0± 0 0± 0 0± 0 1.782 ± 0.602 1-a 0.464 ± 0.197 0.481 ± 0.141 2.758 ± 0 3.284 ± 0 0± 0 0± 0 0.996 ± 0.393 0.875 ± 0.324 1-b 0.509 ± 0.122 1.141 ± 0.417 3.353 ± 0 3.151 ± 0 0± 0 0± 0 1.698 ± 0.471 1.695 ± 0.517 1-A 0,339 ± 0,121 0.761 ± 0.294 1,51 ± 0 1.098 ± 0 0± 0 0± 0 1,03 ± 0,346 1.164 ± 0.573 1-B 0,396 ± 0,189 0.371 ± 0.173 1,497 ± 0 1.777 ± 0 0± 0 0± 0 1,43 ± 0,727 2.102 ± 1.217 2-A 0,308 ± 0,134 0.424 ± 0.196 1,739 ± 0 1.648 ± 0 0± 0 0± 0 0,549 ± 0,202 0.604 ± 0.246 2-B 0,32 ± 0,118 0.212 ± 0.058 1,356 ± 0 1.439 ± 0 0± 0 0± 0 1,116 ± 0,434 1.406 ± 0.388
T ab ella 5.13: parametri v1 ,c1 ,v2 e c2 del campione umano e di tutti iprototipi, con due differen ti angoli di con tatto PAD v1 c1 v2 c2 sse 20 ° 30 ° 20 ° 30 ° 20 ° 30 ° 20 ° 30 ° 20 ° 30 ° Umano 0.965 ± 0 0.983 ± 0 0.147 ± 0.050 0.555 ± 0.187 178.417 ± 13.946 99.959 ± 0.001 0.225 ± 0.076 0.719 ± 0.243 0.641 0.641 Prot.2 EF0010 0.789 ± 0 0.471 ± 0 0.137 ± 0.054 0.099 ± 0.037 10 ± 0 10 ± 0 0.520 ± 0.205 0.340 ± 0.126 0.874 1.352 Prot.2 EF0030 0.813 ± 0 1.203 ± 0 0.146 ± 0.040 0.224 ± 0.068 10 ± 0 10 ± 0 0.560 ± 0.155 0.758 ± 0.231 3.133 15.86 Prot.3 EF0010 0,860 ± 0 0.993 ± 0 0,227 ± 0,076 0.303 ± 0.149 10 ± 0 10 ± 0 0,839 ± 0,281 0.619 ± 0.305 1.740 3.831 Prot.3 EF0030 0,645 ± 0 0.419 ± 0 0,104 ± 0,053 0.245 ± 0.142 10 ± 0 10 ± 0 0,511 ± 0,259 0.708 ± 0.410 2.055 6.477 Prot.4 EF0010 0,670 ± 0 0.555 ± 0 0,147 ± 0,054 0.155 ± 0.047 10 ± 0 10 ± 0 0,317 ± 0,116 0.463 ± 0.188 0.750 0.699 Prot.4 EF0030 0,753 ± 0 0.659 ± 0 0,117 ± 0,046 0.147 ± 0.041 10 ± 0 9.630 ± 0.240 0,252 ± 0,098 0± 0 1. 215 0.655
• la matrice f dell’immagine è stata binarizzata tramite la funzione im2bw con la seguente linea di comando:
g = im2bw(f, 0.9 ∗ graythresh(f )); (5.1) dove la funzione graythresh calcola una soglia globale (LEVEL) che può essere usata per convertite una qualsiasi immagine in un’imamgine bi-naria con la funzione im2bw. LEVEL rappresenta un valore di intensità normalizzata che assume valori nel range [0, 1]. La funzione graythresh utilizza per fare ciò il metodo di Otsu, il quale sceglie la soglia per minimizzare la varianza interclasse dei pixel neri e bianchi risultanti dall’operazione di soglia.
• la matrice g risultante è stata analizzata riga per riga selezionando in ciscuna di questa il primo e l’ultimo pixel nero, sono stati, quindi, trasformati in pixel neri tutti i pixel interposti tra questi due
• è stato contato il numero di pixel neri ed è stato moltiplicato per il valore dell’area del singolo pixel ottenendo così l’area totale
Le aree ottenute dall’analisi delle imamgini sono state utilizzate per analiz-zare la variazione di area percentuale secondo la seguente espressione:
Ai+1− Ai 0.25 · Ai
con i = 0.5...2.75 con passo di 0.25 (5.2) Gli andamenti delle variazioni percentuali di area sono mostrati nella figura 5.31. La valutazione delle aree effettive di contatto e soprattutto della varia-zione percentualed dell’area all’aumentare dell’area di contatto ha condotto alle seguenti considerazioni:
• nei prototipi selezionati la variazione percentuale dell’area di contatto all’aumentare del livello di indentazione ha un andamento analogo • la geometria sia del dito umano che dei prototipi selezionati conducono
ad avere due picco di variazione dell’area di contatto, il primo a 0.75 mm di indentazione e l’altro a 1.75 mm di indentazione
Figura 5.29: impronte dito umano e due prototipi selezionati,con angolo di contatto pari
a 30°
Figura 5.30: impronte dito umano e due prototipi selezionati,con angolo di contatto pari
Tabella 5.14: aree effetive di contatto del campione umano e di due prototipi scelti
all’aumentare del livello di indentazione con angolo di contatto pari a 30° indentazione (mm) Area Umano Area PAD-2A Area PAD-2B
(mm2) (mm2) (mm2) 0.5 10,194 35,440 26,437 0.75 17,750 50,222 38,901 1 31,502 65,638 51,491 1.25 37,259 79,253 57,900 1.5 44,241 83,511 0.66 1.75 66,602 104,014 62,753 2 78,579 114,118 86,331 2.25 90,823 126,856 100,217 2.5 99,746 136,830 103,673 2.75 105,675 140,185 108,483 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 0 0.5 1 1.5 2 2.5 3 3.5 4x 10 −3 indentazione (mm) [A(i+1)−A(i)]/A(i)*0.25 dito umano PAD−2A PAD−2B
Figura 5.31: andamenti delle variazioni relative di area di contatto, con angolo di contatto