1
Sommario
INTRODUZIONE ... 6
1 PASSAGGI A LIVELLO ... 8
1.1 Tipologie di passaggi a livello in Italia ... 8
1.2 Classificazione dei passaggi a livello ... 10
1.2.1 Passaggi a livello con barriere complete manovrate automaticamente... 13
1.2.2 Passaggi a livello con semibarriere manovrate automaticamente ... 15
1.2.3 Passaggi a livello con barriere non manovrate automaticamente ... 16
1.2.4 Passaggi a livello sussidiati da visualizzazione TV ... 18
1.2.5 Passaggi a livello sussidiati da protezione automatica integrativa (PAI-PL) ... 19
1.3 Il problema della sicurezza sui Passaggi a livello ... 21
1.3.1 Statistiche sugli incidenti ferroviari in Italia ... 21
1.3.2 Riduzione del numero dei passaggi a livello in Italia dal 2005 al 2012 ... 23
1.4 Nuove tecnologie per l’incremento della sicurezza dei passaggi a livello ... 24
1.4.1 RADAR ... 25
1.4.2 LIDAR ... 25
1.4.3 Imaging ... 27
1.4.4 Induction loop ... 29
2 IL PROGETTO SIMPLE E LA TECNOLOGIA RADAR ... 31
2.1 Il progetto SIMPLE ... 31
2.2 I sensori radar ... 34
2.2.1 Il principio di funzionamento e le logiche decisionali per il rilevamento degli ostacoli 34 2.2.2 L’equazione radar e la Radar Cross Section ... 36
2.2.3 Probabilità di Mancata Detezione e Probabilità di Falso Allarme ... 39
2.2.4 Condizioni atmosferiche e multipath ... 41
2.2.5 Soluzioni implementative del sistema radar nel progetto SIMPLE ... 43
2.3 Gli altri sensori in uso sul PL nel progetto SIMPLE: telecamere e sottosistema video ... 46
3 UN SISTEMA DI DIAGNOSTICA PER I SENSORI SIMPLE SU PASSAGGIO A LIVELLO ... 48
3.1 Un sistema per il remote recording ... 48
3.2 Supporto in fase di progettazione ... 51
3.2.1 Scelta della soglia RCS primaria ... 51
2
3.3 Validazione delle soglie RCS, riduzione dei falsi allarmi e rispetto dei confini della ZdO ... 52
3.3.1 Riflessione multipla dei fasci ... 52
3.3.2 Disturbi indotti dal terreno ... 53
3.3.3 Sfondi “rumorosi” ... 54
3.4 Informazioni aggiuntive sui guasti vitali dei sensori ... 54
3.4.1 Perdita del segnale del corner di riferimento ... 55
3.4.2 Malfunzionamento per condizioni metereologiche critiche e vibrazioni ... 56
3.5 Una diagnostica avanzata... 57
3.5.1 Acquisizioni configurabili ... 57
3.5.2 Recupero delle informazioni ... 58
4 REQUISITI E ARCHITETTURA DEL SISTEMA DI DIAGNOSTICA ... 60
4.1 Studio dei casi d’uso ... 62
4.2 Requisiti del sistema... 65
4.2.1 Requisiti architetturali ... 66
4.2.2 Requisiti funzionali ... 66
4.2.3 Requisiti prestazionali ... 70
4.2.4 Requisiti di sicurezza ... 71
4.2.5 Requisiti di qualità ... 72
4.2.6 Requisiti ambientali ed operazionali ... 72
4.2.7 Requisiti d’interfaccia ... 73
4.3 Architettura del sistema di diagnostica... 75
4.3.1 Interfacciamento tra il dispositivo diagnostico e il sensore radar ... 75
4.3.2 Interfacciamento tra il dispositivo diagnostico e le telecamere ... 77
4.3.3 Interfacciamento tra il dispositivo diagnostico e l’Unità di Elaborazione ... 78
4.3.4 Interfacciamento tra il dispositivo diagnostico e la Postazione Remota ... 78
4.3.5 Interfacciamento tra il dispositivo diagnostico e il tool software dedicato ... 79
4.3.6 Interfacciamento tra il dispositivo di diagnostica e l’equipment di storage ... 80
4.4 Organizzazione interna del dispositivo diagnostico ... 80
4.4.1 Dimensionamento delle capacità di calcolo e di immagazzinamento dati ... 80
4.4.2 Definizione dei moduli di comunicazione ... 81
4.5 Soluzioni COTS per il dispositivo diagnostico ... 85
4.5.1 Inertial Measurement Unit ... 86
4.5.2 Weather Station ... 86
4.5.3 Industrial PC ... 87
3
5 CONCLUSIONI ... 98
BIBLIOGRAFIA ... 101
Figura 1: PL con barriere ... 8
Figura 2: PL senza barriere ... 9
Figura 3: Feriti gravi e morti 2001 vs 2012 (Fonte ANSF) ... 22
Figura 4: Metodi di ‘LIDAR detection’ con due possibili angoli i scansione massimi ... 26
Figura 5: Costi, vantaggi e svantaggi della tecnologia LIDAR ... 27
Figura 6: Costi, vantaggi e svantaggi dell'uso delle videocamere ... 28
Figura 7: Utilizzo di Induction loop per il rilevamento di un automobile ... 29
Figura 8: Costi, vantaggi e svantaggi dell'uso dei loop a induzione ... 30
Figura 9: Sistema SIMPLE per il monitoraggio dei passaggi a livello ... 33
Figura 10: Calcolo della distanza dal target T ... 35
Figura 11: Angoli di elevazione e azimuth ... 35
Figura 12:Concetto di RCS ... 37
Figura 13: RCS di una superficie piana in funzione della lunghezza d'onda e dell’altezza h ... 39
Figura 14: Inviluppo del segnale ricevuto nel tempo ... 40
Figura 15: Probabilità di detezione in funzione del rapporto segnale-rumore ... 41
Figura 16: Attenuazione causata dall'atmosfera in funzione delle frequenza degli impulsi radar ... 42
Figura 17: Attenuazione causata dalle idrometeore in funzione della frequenza ... 42
Figura 18: Fenomeno dei cammini multipli ... 43
Figura 19: Mappa radar dell'area monitorata in presenza di un automobile e valori di RCS rilevabili 49 Figura 20: Schema a blocchi del sistema di diagnostica utilizzato per la registrazione degli eventi .... 50
Figura 21: Ballast attorno ai binari ... 53
Figura 22: Corner retroriflettente ... 55
Figura 23: Schematizzazione del ciclo di vita a V ... 61
Figura 24: Use Case Diagram relativo all'acquisizione dei dati in tempo reale ... 63
Figura 25: Use Case Diagram relativo all'acquisizione dei dati ricavati da una registrazione precedente ... 64
Figura 26: Il sistema di diagnostica nel contesto operativo SIMPLE ... 75
4
Acronimi e abbreviazioni
Acronimo Significato
ACC Apparato Centrale Computerizzato
ACCM Apparato Centrale Computerizzato Multistazione
ACE Apparati centrali elettrici a leve individuali
ACEI Apparati centrali elettrici a "pulsanti di itinerario”
ANSF Agenzia Nazionale per la Sicurezza delle Ferrovie
BA Blocco Automatico
BAcc Blocco Automatico a correnti codificate
BCA Blocco Conta Assi
BEM Blocco Elettrico Manuale
CTC Centralized Traffic Control
DCO Dirigente Centrale Operativo
DM Dirigente Movimento
GI Gestore dell’Infrastruttura ferroviaria nazionale
GPS Global Positioning System
ICT Information and Communication Technologies
OO Obiettivo Operativo
PA Pubblica Amministrazione
PAI Protezione Automatica Integrativa
PAI-PL Protezione Automatica Integrativa per i PL
5
PCM Posto Centrale Multistazione
PJ Posto di Interconnessione
PM Posto di Movimento
PMV Pannelli a Messaggio Variabile
PL Passaggio a Livello
PLC Programmable Logic Controller
PdS Posto di Servizio
RCS Radar Cross Section
SIMPLE Sicurezza ferroviaria e Infrastruttura per la Mobilità applicate ai Passaggi a LivEllo
SNR Signal to Noise Ratio
TO Tastiera Operatore
TV TeleVisione
TVPL TeleVisione PL
6
INTRODUZIONE
Il presente lavoro di tesi si colloca nell’ambito della sicurezza ferroviaria legata alla pericolosità dei passaggi a livello. Tale aspetto viene spesso sottolineato da notizie di eventi catastrofici nei quali vengono coinvolte decine di persone ogni anno. Il continuo aumento di perdite umane, i danni provocati ai convogli e ai loro passeggeri hanno spinto gli enti gestori delle ferrovie dei paesi più industrializzati ad investire ingenti somme nello sviluppo di tecnologie per la prevenzione degli incidenti ferroviari in prossimità dei passaggi a livello.
Tra tutte le innovazioni apportate nel campo della safety ferroviaria, nei primi capitoli di questa tesi verrà dato risalto alle funzionalità di rilevamento ostacoli con l’ausilio della tecnologia radar. Oltre che dai vantaggi offerti dall’applicazione di questa tecnica rispetto ad altre, l’approfondimento in materia di sensori radar verrà giustificato dalla possibilità di osservarne le potenzialità su prototipi in via di sviluppo nel contesto di un progetto finanziato dalla regione Toscana. Questo progetto, noto come SIMPLE, si prefigge l’obiettivo di aumentare la sicurezza di alcuni passaggi a livello presenti sul territorio toscano utilizzando la tecnologia radar.
In base a quanto detto, lo scopo di questa trattazione può essere riassunto nei due seguenti obiettivi: il primo consiste nella individuazione dei fattori ambientali che possono influenzare il sensore radar del sistema SIMPLE; il secondo riguarda la progettazione di un sistema di diagnostica per la raccolta dei dati il cui impiego possa aiutare il progettista nel dimensionamento dei parametri del meccanismo di rilevamento ostacoli. Poiché previsto dalle linee guida del progetto SIMPLE, questo sistema diagnostico dovrà integrarsi perfettamente con l’architettura del nodo di monitoraggio. Inoltre risulterà fondamentale la possibilità di impiegare il dispositivo durante la progettazione e prototipazione del radar, nonché nelle fasi di validazione e verifica.
Le conoscenze tecniche specifiche verranno acquisite attraverso testi scientifici e con il supporto delle figure preposte allo progettazione del sistema di monitoraggio. Per quel che concerne invece la progettazione del sistema di diagnostica, saranno definiti i requisiti e l’architettura seguendo la metodologia prevista per la stesura di documentazione di progetti riguardanti le applicazione ferroviarie. L’utilizzo di un metodo rigoroso di progettazione permetterà di non trascurare nessun aspetto riguardante le funzionalità richieste al sistema
7 diagnostico e allo stesso tempo faciliterà l’integrazione del lavoro svolto con i documenti ufficiali del progetto SIMPLE.
Il lavoro di progettazione del sistema di diagnostica si concluderà con la descrizione dei criteri da utilizzare per la ricerca sul mercato di componenti che possano essere utili alla realizzazione finale del dispositivo.
8
1 PASSAGGI A LIVELLO
In questo capitolo si cercherà di affrontare uno studio su quelle che sono le tipologie dei passaggi a livello e le problematiche di sicurezza ad essi associate. Verranno riportate le statistiche su incidenti più o meno gravi fornite dagli organi ufficiali preposti al monitoraggio di tali strutture e sarà dato ampio spazio ai mezzi attualmente a disposizione per la gestione del sistema ferroviario e viario. Infine saranno presentate le tecnologie sperimentali che vengono sviluppate per la prevenzione di incidenti in prossimità dei PL.
1.1 Tipologie di passaggi a livello in Italia
I Passaggi a Livello (PL) presenti nel territorio nazionale formano una gamma molto vasta e possono essere classificati in diversi modi, ad esempio a seconda della tipologia di barriere, della logica di comando, dei segnali di protezione, ecc..
In generale i passaggi a livello possono distinguersi in:
passaggi a livello con barriere;
9 passaggi a livello senza barriere.
Figura 2: PL senza barriere
I passaggi a livello con barriere a loro volta possono essere:
o esercitati dal Gestore dell’Infrastruttura ferroviaria nazionale (GI); o in consegna agli utenti.
Per barriere si indicano genericamente qualunque tipo di chiusura che sbarri, in tutto o in parte la sede stradale, ad esempio sbarre levatoie e girevoli, semibarriere, cancelli, cavalletti, ecc..
Le manovre di gestione delle barriere esercitate dal GI possono essere automatiche o non automatiche. In questo secondo caso possono essere manovrati sul posto o a distanza. In quelli manovrati sul posto i dispositivi di controllo si trovano in prossimità delle barriere e l’addetto interviene direttamente sull’attraversamento stradale.
A seconda della loro ubicazione i passaggi a livello possono essere classificati in PL di stazione e di linea:
i primi sono quelli siti a valle dei segnali di protezione, ad una distanza non inferiore a metri 50 da questi, se di prima categoria, e non inferiore alla lunghezza del treno di massima composizione ammessa sulla linea aumentata di metri 100 se i segnali sono di seconda categoria;
i «PL di linea» sono gli attraversamenti stradali che non rientrano nel caso precedente anche nell’ipotesi in cui la manovra delle loro barriere viene effettuata a distanza, anche da posti di stazione.
10 I PL con barriere esercitati dal GI possono essere classificati inoltre nel modo seguente:
regime di esercizio aperto, ovvero normalmente aperti e chiusi per il transito dei treni;
regime di esercizio chiuso, ovvero normalmente chiusi e aperti a richiesta degli utenti stradali.
In sintesi le modalità di esercizio dei PL con barriere gestiti dal GI sono principalmente caratterizzate dal regime di chiusura, dal fatto che le barriere siano manovrate sul posto oppure a distanza, dalla presenza o meno delle protezioni da segnali.
Il passaggio a livello si intende collegato al segnale quando fra quest’ultimo e gli organi di chiusura del passaggio a livello stesso esiste un collegamento di sicurezza, cioè un vincolo meccanico o elettrico - realizzabile anche con consensi elettrici a distanza - tale che il segnale dia il via libera se le barriere sono in posizione di chiusura e che per riaprirle il segnale stesso sia ridisposto a via impedita. Il collegamento descritto può essere dotato anche della funzione “bloccabile” se in grado di dialogare con un apposito dispositivo detto “di liberazione” dei treni.
I PL esercitati dal GI con barriere complete, automatiche e non sono, di regola, protetti da segnale e muniti di telefono sul posto. I PL con semibarriere manovrate automaticamente (da treno), invece non sono protetti da segnali, ma sono muniti di dispositivi di allarme per guasto e di telefono sul posto.
I PL possono essere dotati anche di impianto di visualizzazione TV a circuito chiuso atto a svolgere una funzione sussidiaria del rilevamento dello stato di attraversamento rispetto al transito dei treni. Funzione simile nel caso di PL con manovra elettrica protetti da segnali può essere svolta anche da un altro tipo di apparato, la Protezione Automatica Integrativa (PAI), che ha lo scopo di rilevare sull’area monitorata la presenza di ingombri preesistenti o determinatisi durante la chiusura delle sbarre.
1.2 Classificazione dei passaggi a livello
Da un punto di vista più tecnico i PL possono essere classificati in base agli schemi di principio o più in generale a seconda del sistema di comando. In quest’ultimo caso si individuano i PL comandati da apparato centrale, quelli manovrati direttamente da personale di guardia, quelli
11 controllati da apparato di stazione e quelli governati da treno. Per apparato centrale si intende un impianto di una località di servizio (stazione, bivio, ecc.) atto al comando a distanza della manovra dei deviatoi. Normalmente in tale apparato è centralizzata anche la manovra di altri enti; inoltre, in esso sono realizzati collegamenti di sicurezza fra segnali, deviatoi e gli eventuali PL. L’apparato interagisce con i sistemi di blocco che regolano la circolazione dei treni nelle tratte limitrofe. Si definiscono apparati centrali elettrici gli impianti nei quali la manovra a distanza degli enti di piazzale (deviatoi, barriere di PL, segnali) è ottenuta mediante energia elettrica.
Gli apparati centrali elettrici più diffusi possono essere ricondotti alle seguenti tipologie:
• Apparati centrali elettrici a leve individuali (ACE): il comando è realizzato con leve distinte per ogni ente manovrato dall'apparato e i collegamenti di sicurezza si realizzano di principio mediante la serratura meccanica;
• Apparati centrali elettrici a "pulsanti di itinerario” (ACEI): di principio, il comando è realizzato per ogni itinerario o istradamento con l'azionamento di un solo organo, il pulsante, mentre la manovra dei singoli enti interessati dall'itinerario o dall'istradamento è determinata automaticamente dai dispositivi dell'apparato. Negli ACEI non esiste serratura meccanica e tutti i collegamenti di sicurezza sono realizzati tramite relè, chiamata “serratura elettrica”.
• L’Apparato Centrale Computerizzato (ACC): è un sistema centralizzato per il governo delle funzioni dell’impianto, realizzato con tecnologia a logica programmata. Esso gestisce in sicurezza la circolazione nell’impianto, con la caratteristica che i comandi impartiti vengono accettati solo se l’apparato verifica preventivamente la fattibilità del comando stesso. Oltre alle logiche di movimento ed alle interfacce necessarie per DM, il sistema ACC mette a disposizione, per la gestione dell’impianto, sia dal punto di vista dell’esercizio che della manutenzione, una serie di funzioni di supporto per l’espletamento dei compiti dell’operatore.
• L’Apparato Centrale Computerizzato Multistazione (ACCM): è costituito da un Posto Centrale Multistazione (PCM) e da Posti Periferici in corrispondenza dei vari Posti di Servizio (PM, PC, PJ) presenti in linea, che devono essere attrezzati, per quanto riguarda il piazzale, secondo gli standard tecnico-funzionali delle linee telecomandate. Oltre alle logiche di movimento ed alle interfacce necessarie per DM, il sistema ACC mette a disposizione per la gestione dell’impianto, sia dal punto di vista dell’esercizio che della manutenzione, una serie di funzioni di supporto per l’espletamento dei compiti dell’operatore.
12 Passando agli schemi di principio di seguito vengono elencate le tipologie e le definizioni generali:
S.PL 1 Apparati Elettrici a leve individuali - Schema dei circuiti elettrici per la manovra e il controllo delle barriere da PL - Barriere tipo F.S. c.c. manovra di una coppia di barriere;
S.PL 2 Apparati Elettrici a leve individuali - Schema dei circuiti elettrici per la manovra e il controllo delle barriere da PL - Barriere tipo F.S. c.c. manovra di due coppie di barriere;
S.PL 3 ACEI tipo a pulsanti - Schema dei circuiti elettrici per la manovra e il controllo delle barriere da PL - Barriere tipo F.S. c.c. manovra di una coppia di barriere; S.PL 4 ACEI tipo a pulsanti - Schema dei circuiti elettrici per la manovra e il controllo delle barriere da PL - Barriere tipo F.S. c.c. manovra di due coppie di barriere; S.PL8 - II serie Sistema relativo agli impianti di PL, manovrati a mano, in linea protetti da segnali, su linee con blocco elettrico manuale (BEM) o senza blocco;
SPL.8/1 - II serie Sistema relativo agli impianti di PL, manovrati elettricamente, in linea protetti da segnali, su linee con blocco elettrico manuale (BEM) o senza blocco; S.PL 22 Sistema relativo agli impianti di PL, con manovra a mano, in linea protetti da segnali, su linee con blocco automatico a correnti codificate (BAcc) reversibile;
S.PL 22/1 Sistema relativo agli impianti di PL, con manovra elettrica, in linea protetti da segnali, su linee con blocco automatico a correnti codificate (BAcc) reversibile;
V 301 PL muniti di barriere comandate dai treni e protetti da appositi segnali lato ferrovia su linee a semplice binario;
V 303 PL di linea normalmente impresenziato protetto dai segnali di partenza delle stazioni limitrofe con chiusura su comando degli itinerari di partenza e con circuiti di manovra e controllo installati in stazione;
V 305 PL con barriere comandate da un lato dai treni e dall'altro su formazione d'itinerario e protetto, rispettivamente, da appositi segnali lato ferrovia e segnali di partenza della stazione limitrofa (Linee a semplice binario).
V 308 PL di linea normalmente impresenziato protetto dai segnali di partenza delle stazioni limitrofe non presenziabili, con chiusura su comando degli itinerari di partenza e con circuiti di manovra e controllo installati in linea;
13 S.PL 22/1 Aut PL con manovra automatica e non delle barriere - Linee attrezzate con BACC - Modifiche allo schema S PL 22/01 per l'impresenziamento del Posto di Guardia;
S.PL 23 PL con barriere complete azionate automaticamente dai treni su linee a doppio binario con BACC;
S.PL 24 PL con barriere complete azionate automaticamente dai treni su linee a doppio binario con BCA;
S.PL Aut 1 PL provvisti di mezze barriere automatiche e di segnali stradali; S.PL Aut 3 PL con segnalazione luminosa a comando automatico.
Per poter comprendere gli aspetti di gestione della sicurezza senza addentrarsi troppo a fondo in aspetti tecnici conviene prendere in esame la logica di esercizio. Nei paragrafi successivi viene riportata una breve descrizione dei tratti essenziali dell’esercizio delle tipologie di PL principali e più diffusi.
1.2.1 Passaggi a livello con barriere complete manovrate automaticamente
I PL di linea con barriere complete manovrate automaticamente che chiudono l’intera carreggiata possono essere protetti, lato ferrovia, nel seguente modo:
con i segnali fissi luminosi;
con gli specifici segnali del Regolamento sui Segnali (limitatamente alle linee a semplice binario);
con i segnali di partenza delle stazioni limitrofe; con i segnali intermedi di BA;
con i segnali di posti di blocco intermedi di BCA e di Blocco elettrico manuale;
con i segnali di 1ª categoria che svolgono anche la funzione di segnale di avviso di una stazione.
Il comando per la richiesta del consenso di chiusura delle barriere è attivato nel modo seguente:
14 per la circolazione nel senso legale, il comando per la richiesta del consenso di chiusura delle barriere è attivato con la formazione dell’itinerario di partenza, quando la protezione viene effettuata col segnale di partenza di una stazione, o direttamente dal treno negli altri casi;
per la circolazione nel senso illegale, il comando per la richiesta del consenso di chiusura delle barriere è attivato mediante specifici tasti ubicati nelle stazioni limitrofe;
b) linee a doppio binario banalizzate:
per la circolazione, sia sul binario di sinistra che di destra, il comando per la richiesta del consenso di chiusura delle barriere è attivato con la formazione dell’itinerario di partenza, se la protezione è effettuata col segnale di partenza o direttamente dal treno negli altri casi. Nel caso di circolazione in senso opposto all’orientamento del blocco, il comando per la richiesta del consenso di chiusura delle barriere non viene attivato né con la formazione dell’itinerario né direttamente dal treno; pertanto, i DM interessati devono adottare le cautele necessarie per garantire la marcia dei treni in corrispondenza dei PL interessati.
c) linee a semplice binario:
il comando per la richiesta del consenso di chiusura delle barriere è attivato con la formazione dell’itinerario di partenza, quando la protezione viene effettuata col segnale di partenza di una stazione, o direttamente dal treno negli altri casi.
Per i PL protetti dai segnali di partenza è ammesso, ai fini della concessione del consenso, raggruppare i PL fino ad un massimo di quattro, compresi in una distanza di 2000 metri.
I PL sono dotati dei seguenti dispositivi di controllo di tipo ottico ed acustico, ubicati nel posto di
controllo (stazione o posto centrale):
a) allarme per prolungata chiusura o segnalazione di apertura delle barriere; b) eventuale allarme per mancanza di alimentazione.
Nel caso che al verificarsi di allarme di prolungata chiusura (o di anormalità relativa alla segnalazione di apertura delle barriere) non vi siano treni in circolazione e si abbia modo di presumere che l’allarme, o l’anormalità, siano dovuti a guasto dell’impianto, viene effettuata la liberazione artificiale con modalità diverse a seconda delle caratteristiche della linea e secondo procedure ben precise.
15 Questi PL sono sussidiati con segnali luminosi stradali. La mancata illuminazione dei segnali stradali è riportata nel posto di controllo ed è cumulata all’allarme per mancanza di alimentazione.
Il controllo d’illuminazione dei predetti segnali, di regola, non è inserito nelle condizioni necessarie per l’apertura dei segnali né per il manifestarsi del consenso.
I PL protetti dai segnali di partenza, esclusi quelli ubicati sulle linee a semplice binario telecomandate o sulle linee dove è prevista l’attivazione del telecomando, sono muniti di un apposito tasto distinto per senso e per binario che permette di escludere, treno per treno, il consenso del PL (o dei PL) dalle condizioni necessarie per l’apertura del segnale.
Tale tasto può essere azionato solo dopo aver preso le necessarie cautele per garantire che ad ogni treno inoltrato dalla stazione venga praticata la prescrizione di marcia a vista.
1.2.2 Passaggi a livello con semibarriere manovrate automaticamente
I PL con semibarriere manovrate automaticamente sono controllati a distanza da un posto di controllo in maniera simile a quelli descritti nel paragrafo precedente. Nel posto di controllo per questo tipo di PL sono previsti due o tre dispositivi di allarme con indicazione ottica ed acustica:
a) allarme per guasto (mancata chiusura delle barriere, mancata accensione delle luci rosse lampeggianti del passaggio a livello, tallonamento barriere, ecc.);
b) allarme per mancanza di energia elettrica;
c) allarme per prolungata chiusura delle barriere.
I dispositivi di allarme di tipo a) e di tipo b) sono realizzati in tutti gli impianti mentre quello di tipo c) può non esistere e, in tal caso, l’allarme di tipo a) comprende anche la condizione d’indebita permanenza delle barriere in posizione di chiusura.
L’allarme di tipo a) indica che il PL automatico è da considerarsi guasto a tutti gli effetti. Tale tipo di allarme è collegato con i segnali delle due stazioni.
L’allarme di tipo b) notifica un’anormalità dalla quale potrà successivamente derivare l’inefficienza del passaggio a livello, qualora essa si protragga oltre un certo periodo di tempo,
16 dipendente dall’autonomia dell’impianto di alimentazione di riserva. L’allarme di tipo c) indica che le barriere sono rimaste chiuse oltre 5 minuti primi. Nei casi di allarme sopraelencati vi sono procedure ben precise che contengono le indicazioni per i necessari interventi di emergenza fino all’istituzione del presenziamento e la prescrizione di viaggiare con marcia a vista.
1.2.3 Passaggi a livello con barriere non manovrate automaticamente
Nei PL con barriere non manovrate automaticamente dai treni e protetti da segnali, la manovra a via libera di questi ultimi avviene solo dopo che siano state chiuse le barriere dei PL stessi.
Quando le barriere sono manovrate da un posto di custodia diverso da quello che manovra i segnali (stazione, bivio, posto di blocco, ecc.) l’addetto alla custodia del PL riceve di volta in volta una comunicazione o segnalazione dell’approssimarsi dei treni dal lato protetto dal segnale. Dette comunicazioni o segnalazioni (trasmesse nell’imminenza di ciascun treno in modo da non arrecare ritardo al treno stesso) fanno obbligo all’addetto alla custodia del PL di effettuare la chiusura delle barriere. L’addetto alla custodia del PL, dopo aver chiuso le barriere stesse, trasmetterà al suddetto posto di manovra segnali il consenso necessario per l’apertura dei segnali.
Quando invece la manovra delle barriere è affidata allo stesso posto che effettua la manovra del segnale, l’addetto alla custodia viene messo tempestivamente a conoscenza dell’approssimarsi di ciascun treno; solo dopo aver chiuso le barriere l’addetto alla custodia potrà aprire il segnale che protegge il PL dal lato da cui deve provenire il treno, richiudendolo appena questo lo abbia sorpassato, prima di aprire nuovamente le barriere. Nel caso eccezionale di PL con barriere non manovrate automaticamente e non protette da segnale, la chiusura delle barriere deve essere effettuata sull’effettiva marcia dei treni mediante richiesta verbale di chiusura e dispaccio di conferma di chiusura da parte dell’addetto alla custodia prima dell’inoltro da una stazione di ciascun treno. In mancanza di tale conferma ai treni deve essere prescritta la marcia a vista in corrispondenza dei PL per i quali manca la conferma di chiusura.
Dovendo la manovra di chiusura e di apertura delle barriere essere eseguita in modo da non dar luogo a posizioni che possano determinare pericolo di investimento da parte dei veicoli stradali, nel caso in cui il PL sia munito di barriere sdoppiate (due per ognuno dei due sensi di circolazione
17 stradale), la chiusura viene effettuata iniziando da quelle che sbarrano l’accesso al PL stesso, nel normale senso di circolazione, e la riapertura da quelle di uscita.
La manovra delle barriere comandate a distanza viene eseguita in base alle istruzioni impartite caso per caso a seconda delle caratteristiche del dispositivo di comando, in modo tale da rispettare il più possibile la velocità di azionamento prescritta, al fine di non pregiudicare le caratteristiche regolamentari (anticipo e durata) della segnalazione, automaticamente connessa
con la manovra delle sbarre, che avverte l’utente stradale dell’imminenza dell’abbassamento delle barriere.
Si ritiene opportuno sottolineare che per la riapertura delle barriere manovrate a distanza si osservano le seguenti modalità:
se nel posto di custodia esistono segnalazioni ottiche od acustiche messe in funzione direttamente dal treno al transito sul PL, oppure tra quest’ultimo ed il segnale che lo protegge esiste un collegamento di sicurezza bloccabile, la riapertura delle barriere avviene quando si manifestano le suddette segnalazioni o quando si verifica la liberazione;
se, in via permanente od anche soltanto temporanea, non sussiste alcuna delle condizioni di cui al precedente punto, l’addetto alla custodia, prima di riaprire le barriere, osserva un conveniente tempo di attesa dopo il quale procede a chiedere notizia telefonica, non registrata, ad un posto successivo opportunamente ubicato (stazione, posto di linea fisso, ecc.) che il treno interessato abbia oltrepassato il PL considerato.
Anche per questi tipi di PL vi sono procedure ben precise che contengono le indicazioni per i necessari interventi di emergenza fino all’istituzione del presenziamento e la prescrizione di viaggiare con marcia a vista. Tra le situazioni degradate principali si ricordano la non regolare liberazione per la riapertura delle barriere per la quale si procede con la liberazione artificiale, l’inefficienza dei segnali di protezione, guasti di collegamento tra PL e segnali, guasti che impediscono la chiusura o la riapertura delle barriere.
18 1.2.4 Passaggi a livello sussidiati da visualizzazione TV
Determinati PL protetti da segnali di stazione e, o di linea possono essere attrezzati con impianto di visualizzazione TV a circuito chiuso. Gli impianti di visualizzazione televisiva sui hanno carattere sussidiario al fine di rilevare la libertà dell’attraversamento rispetto al transito dei treni. La visualizzazione TV di norma è prevista in una sola stazione. Gli impianti TV a circuito chiuso, sono previsti solo per i PL da rendere impresenziati sul posto e da automatizzare che, oltre ad essere lontani e non visibili dal punto di manovra, presentino difficoltà di esercizio quali:
attraversamenti di più di due binari, notevole traffico pesanti o tracciato stradale difficile e tortuoso;
intralci, per incroci o altro, al regolare deflusso stradale.
Per i PL con barriere complete manovrate automaticamente, le unità periferiche possono prevedere l’impiego dell’impianto di visualizzazione TV anche solo per determinati giorni o periodi della giornata.
La richiesta del consenso relativo all’attraversamento del PL si manifesta con una segnalazione acustica e con l’accensione a luce bianca lampeggiante della lampadina che correda l’apposito tasto per la concessione del consenso. L’operatore deve sempre controllare sul monitor la libertà dell’attraversamento prima di agire sul tasto di consenso TV che condiziona l’apertura dei segnali che proteggono il PL o sulla leva di apertura dei segnali stessi. L’azionamento di detto tasto è richiesto anche quando si interviene sui dispositivi di emergenza del PL. Con la concessione del consenso TV la lampada del tasto di consenso si fissa a luce bianca, la segnalazione acustica si tacita ed il video si spegne. Il consenso TV è utilizzabile automaticamente per entrambi i sensi nel caso che venga prevista la visualizzazione TV in una sola stazione. Nel caso particolare che venga prevista la visualizzazione TV in entrambe le stazioni, il consenso è distinto per senso. Il consenso TV resta valido fino a quando non si verifica la riapertura delle barriere; tale operazione determina lo spegnimento della spia del tasto di consenso. Il video può essere riacceso per 60 secondi azionando un apposito tasto ubicato in prossimità del monitor. Nelle stazioni non munite di visualizzazione TV, l’esistenza del consenso TV è visualizzata da apposita segnalazione, associata al binario interessato avente caratteristiche di sicurezza. Le unità periferiche interessate possono prevedere che la segnalazione di consenso TV sia cumulata con quella di consenso elettrico. Qualora al ricevimento della richiesta del consenso non sia possibile, per guasto dell’impianto televisivo, si prescrive la marcia a vista specifica nell’impegnare il PL stesso.
19 I PL muniti di sistema TV prevedono dispositivi di esclusione consenso dell’impianto TV stesso attivabile secondo procedure definite in base alle caratteristiche del segnalamento inerente allo specifico PL in cui è installato.
1.2.5 Passaggi a livello sussidiati da protezione automatica integrativa (PAI-PL)
Alcuni PL con manovra elettrica protetti da segnali di linea e, o di stazione possono essere dotati di uno specifico apparato atto alla verifica della situazione di sgombro dell’attraversamento chiamato Protezione Automatica Integrativa per i PL (PAI-PL). I PAI-PL attualmente in esercizio nella rete nazionale italiana sono 33 suddivisi in quasi tutti i compartimenti.
Le funzioni del PAI-PL sono sussidiarie come nel caso degli impianti TV. La sussidiarietà può essere spiegata in maniera semplificata nel modo seguente: in casi normali il controllo o il consenso dei PL avvengono con la sola chiusura delle barriere mentre per i PL da rendere impresenziati sul posto che, oltre ad essere lontani e non visibili dal punto di manovra, presentino difficoltà di esercizio quali attraversamenti di più di due binari, notevole traffico pesante o tracciato stradale difficile e tortuoso, intralci per incroci o altro ad uno spedito deflusso stradale, sono integrati con ulteriori dispositivi di monitoraggio dell’area del PL.
L’impianto PAI-PL rileva infatti la presenza di ingombri sull’area monitorata, ovvero la presenza accidentale di veicoli o oggetti di grandi dimensioni caduti da veicoli in transito (non vengono considerati animali di piccola taglia, persone, piccoli oggetti).
I PAI-PL possono essere previsti in alternativa ai TV.
Il controllo dell’attraversamento si attiva a barriere chiuse e cessa con il rilevamento della libertà dell’area oppure dopo un tempo massimo di 10 secondi. La condizione di libertà dell’attraversamento a barriere chiuse è inserita tra le condizioni temporanee per il controllo o per il consenso del PL ed è utilizzata per entrambi i sensi di marcia. In caso di chiusura delle barriere relativa al passaggio di più treni in successione il controllo della libertà dell’attraversamento viene effettuato solo per il primo treno.
Un’anormalità del sistema PAI-PL, anche prima dell’accertamento, determina la mancanza del controllo o del consenso del PL monitorato, che viene indicata da un’apposita segnalazione a
20 luce rossa per i PL di stazione ed è cumulata all’allarme per mancata alimentazione per i PL di linea.
Invece, in condizione di regolare funzionamento del PAI-PL l’accertamento positivo di mancanza di ingombro sull’area monitorata determina l’automatica disposizione a via libera dei segnali di protezione.
21
1.3 Il problema della sicurezza sui Passaggi a livello
1.3.1 Statistiche sugli incidenti ferroviari in Italia
Lo sviluppo della sicurezza ferroviaria in Italia viene monitorato dall’Agenzia Nazionale per la Sicurezza delle Ferrovie (ANSF) che annualmente pubblica “L’andamento della sicurezza delle ferrovie” nel quale analizza una serie di dati relativi all’infrastruttura ferroviaria di propria giurisdizione e individua le principali aree di criticità indicando le direttrici delle maggiori azioni rivolte a ridurle e a rimuoverle. Tale analisi riguardano anche l’andamento degli incidenti nei passaggi a livello.
In questo paragrafo verranno riportati una serie di aspetti legati alla sicurezza ferroviaria dei PL trattati nel “L ’andamento della sicurezza delle ferrovie nell’anno 2012” dell’ANSF .
Un primo aspetto interessante emerge dalla seguente tabella nella quale si riportano il numero degli incidenti gravi occorsi nel 2012 in comparazione a quelli avvenuti negli anni precedenti a partire dal 2005, primo anno dal quale sono disponibili dati in ambito nazionale in maniera consistente (la fonte dei dati principale è la “Banca Dati Sicurezza” stilata e aggiornata dal Gestore dell’Infrastruttura).
Per chiarezza si sottolinea che un incidente è considerato grave se in esso è stato coinvolto almeno un veicolo ferroviario in movimento e se ha causato almeno un decesso (si escludono i suicidi) o un ferito grave o danni pari o superiori a 150.000€ ai binari, agli impianti o all'ambiente, oppure un'interruzione del traffico maggiore di 6 ore.
Numero di incidenti gravi periodo 01/01/2005 - 31/12/2012
INCIDENTI 2005 2006 2007 2008 2009 2010 2011 2012
collisioni di treni 5 4 4 2 3 2 6 7
di cui collisioni di treni contro ostacoli
3 3 4 2 3 2 6 7
di cui collisioni tra treni 2 1 0 0 0 0 0 0
deragliamenti di treni 6 11 8 8 5 3 4 5
22 incidenti alle persone provocati
da materiale rotabile in movimento
90 76 83 79 74 80 78 81
incendi al materiale rotabile 4 4 4 2 0 0 0 1
altri tipi di incidenti (*) 4 5 3 3 7 3 2 1
TOTALE INCIDENTI GRAVI 134 132 121 103 94 103 108 108 (*) per “altri incidenti” si intendono tutti gli incidenti non rientranti nelle casistiche precedenti, come ad esempio svii e urti in manovra o di mezzi d’opera, fuoriuscita di merci pericolose
Tabella 1 - Incidenti gravi 2005 – 2012 (Fonte ANSF)
Dalla tabella si evince che nel 2012 il numero di incidenti gravi rimane stabile rispetto al 2011, ma cambiano le entità delle singole tipologie registrando, ad esempio, una diminuzione dei casi relativi ai passaggi a livello.
Per poter fare una valutazione più significativa occorre, però, prendere in considerazione anche l’andamento del valore complessivo dei morti e dei feriti gravi causati dagli incidenti. Infatti, i dati del 2012 mostrano un incremento dei morti e dei feriti gravi rispetto a quelli del 2011, come mostrato nella figura seguente.
23 Proprio negli incidenti ai passaggi a livello si registra un incremento sia dei feriti gravi che dei morti. In sostanza si può affermare che gli incidenti ai passaggi a livello sono circa il 12% degli eventi, ovvero i secondi in classifica, ma i più alti per conseguenze mortali per ciascun caso.
Come visto nelle tabelle precedenti nel periodo 2005-2012 gli incidenti ai passaggi a livello hanno avuto un andamento altalenante a dimostrazione di quanto siano condizionati dalle infrazioni al codice della strada più che da anomalie e da carenze infrastrutturali. Infatti dei 13 incidenti del 2012, 8 sono stati investimenti a pedoni e 5 collisioni tra treni e veicoli stradali.
L’ANSF per questo tipo di incidenti indica come interventi mitigativi le seguenti direttrici:
migliorare la consapevolezza da parte degli utenti stradali dell’approssimarsi ad un passaggio a livello e dei rischi che si corrono in caso di un indebito utilizzo dello stesso;
dotare i passaggi a livello di sistemi di rilevamento degli ostacoli ovvero di sistemi di monitoraggio;
limitare l’accessibilità ferroviaria ai pedoni con passaggio a livello chiuso riducendo accessi laterali, adottando sistemi che non consentano di passare sotto le sbarre;
aumentare la sicurezza nell’utilizzo dei passaggi a livello in consegna ai privati; proseguire nel programma di soppressione dei passaggi a livello, dando priorità ai passaggi a livello che presentano maggiori criticità dal punto di vista della sicurezza.
1.3.2 Riduzione del numero dei passaggi a livello in Italia dal 2005 al 2012
A fronte di una riduzione tra il 2005 e il 2011 del 17,4% del numero dei passaggi a livello per km di linea si è registrata una riduzione del 28% degli incidenti.
Nel solo 2012 sono stati soppressi 57 passaggi a livello di cui 40 in consegna a privati, con un investimento di circa 40 milioni di euro. Al momento, sono in corso lavori per l’eliminazione di 123 passaggi a livello con un investimento previsto di 220 milioni di euro. Obiettivo di RFI per il 2013 è l'eliminazione di altri 58 PL.
24 Fino ad oggi sono stati eliminati da RFI oltre 1.600 passaggi a livello con una spesa complessiva di circa 1.250 milioni di euro.
I passaggi a livello smantellati saranno sostituiti con sottopassi o cavalcavia. Gli interventi sono finanzianti dallo Stato con appositi fondi e sono concordati con gli Enti locali (Regioni, Province e Comuni) e/o Enti quali l’Anas. Inoltre, in ogni Regione è prevista l'eliminazione e automazione di ulteriori passaggi a livello nell’ambito dei programmi di potenziamento infrastrutturale e tecnologico. Queste attività hanno consentito nel 2012 la chiusura di ulteriori 8 passaggi a livello nelle regioni Marche e Puglia.
1.4 Nuove tecnologie per l’incremento della sicurezza dei passaggi a livello
Come si è potuto osservare, le infrastrutture attuali non sono sufficienti a garantire l’assenza di incidenti in corrispondenza dei passaggi a livello. Queste forti limitazioni hanno spinto i gestori delle ferrovie di tutti i paesi più industrializzati del mondo a investire nello sviluppo di nuove tecnologie da utilizzare per la “obstacle detection at level crossings” (rilevamento di ostacoli sui passaggi a livello).
Sebbene ci siano differenze tra le tecnologie usate, i loro modi operativi e le loro caratteristiche vorrebbero essenzialmente fornire un modo affidabile, robusto e accurato di rilevare un ostacolo e fornire un output che possa essere usato per intraprendere determinate contromisure al fine di evitare l’incidente o, nel caso peggiore, di limitarne le conseguenze.
E’ importante capire cosa si intende esattamente per rilevamento di ostacoli sui passaggi a livello e quali sono le caratteristiche che un sistema ideale dovrebbe possedere:
Garantire la sicurezza sui passaggi a livello per tutti gli utenti (in strada e sulla ferrovia)
Evitare manovre da parte dei treni
Evitare l’incremento del traffico nella circolazione viaria
Essere sostenibile in termini di costi di installazione e di manutenzione Essere pratico da usare e mantenere
Essere in grado interfacciarsi con l’infrastruttura ferroviaria esistente e il sistema di segnalamento utilizzato
25 Come evidenziato anche dallo studio dell’organismo indipendente inglese Rail Safety &
Standards Board (RS&SB), le sei principali tecnologie utilizzate per i sensori di rilevamento ostacoli sono:
1. RADAR (Radio detection and ranging), tramite eco riflesso o interruzione del raggio
2. LIDAR (Laser imaging detection and ranging), utilizzando impulsi laser nell’ infrarosso-vicino, invece di onde radio usate nel radar;
3. Imaging (video camere insieme con camere a infrarossi o termiche) 4. Induction loops
1.4.1 RADAR
Radio Detection and Ranging (RADAR) è un metodo per rilevare oggetti utilizzando onde radio. Un descrizione approfondita di questa tecnologia verrà data nel prossimo capitolo.
1.4.2 LIDAR
Laser Image Detection and Ranging (LIDAR) può essere utilizzato per rilevare la presenza di ostacoli. Questa tecnologia ha delle similitudini con il principio fisico utilizzato dai radar; un area può essere ‘spennellata’ con impulsi laser nell’infrarosso-vicino1 i quali vengono riflessi dalla superficie di un oggetto. Gli impulsi riflessi possono essere analizzati per determinare la posizione (in base al tempo di ritorno), la direzione (in base all’inclinazione) e , nel caso in cui l’oggetto sia in movimento, anche la velocità (grazie all’effetto Doppler).
La luce ha una lunghezza d’onda inferiore rispetto alle onde radio, il che significa che il LIDAR è potenzialmente più accurato nel delle dimensioni dell’oggetto rispetto al radar. D’altro canto ciò significa una sensibilità maggiore a tutti gli oggetti di piccole dimensioni, comprese le gocce d’acqua in sospensione che formano la nebbia. Gli effetti della nebbia e di altre condizioni
1
Con il termine infrarosso vicino (Near-infrared o NIR) si indica quella parte di spettro della radiazione infrarossa che va da 214 THz a 400 THz (lunghezza d’onda da a 0,75 µm a 1,4 µm
26 ambientali riscontrabili sui passaggi a livello possono essere controbilanciati da software ’intelligente’.
Tipicamente il Lidar emette un fascio divergente di impulsi. L’area analizzabile può essere controllata variando l’angolo con cui sono emessi gli impulsi. La campata di rilevamento del fascio divergente può variare secondo le specifiche del costruttore. In alcuni casi l’angolo di scansione è determinato da uno specchio rotante che riflette gli impulsi laser in direzioni differenti fino a 180°. Un esempio di oggetti presenti nel fascio di due sensori lidar aventi angoli di scansione differenti è mostrata nella figura successiva. Un angolo di scansione di circa 100° gradi dovrebbe essere sufficiente per un passaggio a livello con un sensore lidar montato in un angolo.
Figura 4: Metodi di ‘LIDAR detection’ con due possibili angoli i scansione massimi
La tecnologia LIDAR è stata testata con successo in Svezia. Le autorità svedesi hanno comunque adottato la scelta politica di chiudere i passaggi a livello anziché monitorarli; pertanto i sensori LIDAR non sono stati installati.
27
Nome prodotto Costi Vantaggi Svantaggi
LIDAR SICK 4000 £ per
equipaggiamento, installazione e testing. Controllo annuale obbligatorio per ispezione Rate di
rilevamento molto alto per la maggior parte degli oggetti
Può essere utilizzato per analizzare può aree di interesse contemporaneamente
Forte dipendenza dalle condizioni climatiche
Laser Optronix 5-10K€ per scanner
Pulizia annuale raccomandata
Figura 5: Costi, vantaggi e svantaggi della tecnologia LIDAR
1.4.3 Imaging
Diversi fornitori hanno identificato l’uso delle telecamere a circuito chiuso come parte del loro sistema di rilevamento ostacoli. Le telecamere sono attualmente utilizzate in alcuni passaggi a livello come supporto per la prevenzione di crimini e violazioni, monitoraggio di traffico e infrazioni dei semafori rossi.
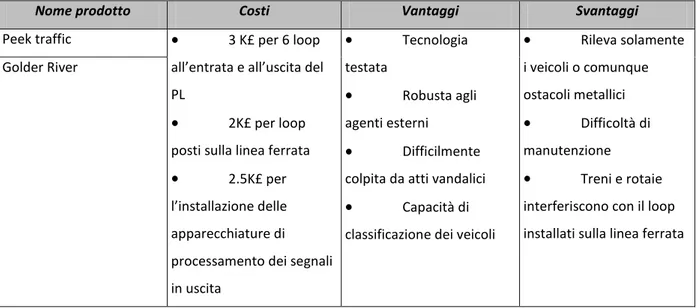
Un problema ovvio che riguarda i normali sistemi di acquisizione video sorge quando si devono rilevare ostacoli durante la notte o durante la presenza di nebbia. Una soluzione consiste dell’use delle videocamere normali insieme a videocamere ad infrarossi (conosciute anche come camere termografiche). L’infrarosso corrisponde ad una parte dello spettro della luce ma non è visibile ad occhio nudo. Materiali diversi si riscaldano e si raffreddano con velocità diverse. Questo fenomeno crea differenze di temperatura che una camera termica riesce a rilevare. Questi gradienti termici esistono sia durante il dì che durante la notte ed è possibile pertanto riconoscere oggetti senza la necessità di luce visibile. Gli animali e le persone hanno emissioni termiche pressoché costanti le quali li rendono altamente visibili per le telecamere
28 termografiche. Allo stesso modo oggetti fatti di metallo come i veicoli irradiano calore e pertanto sono chiaramente riconoscibili.
Le telecamere possono essere corredate da algoritmi software per classificare gli oggetti e automatizzare le eventuali contromisure. Di solito questi algoritmi si basano sull’analisi dei pixel comparando le differenze e i cambi di colore per identificare i contorni dell’oggetto. Questo approccio ha comunque alcuni svantaggi in quanto potrebbe rilevare alcuni oggetti “fantasma” come ombre e riflessi. La contromisura che tipicamente si adotta a questo problema sta nell’utilizzare più telecamere per osservare la stessa scena ed avere cosi una visione stereoscopica e tridimensionale degli oggetti (sistema attualmente in via di sviluppo in Giappone). Con le telecamere è possibile anche rilevare velocità e direzione di eventuali corpi in movimento.
Un vantaggio che deriva dall’uso delle telecamere sta nel fatto che la loro presenza costituisce un deterrente per chiunque intenda compiere azioni illecite. Infatti le persone sono meno propense a violare le regole del codice stradale in presenza dei passaggi a livello se questi ultimi sono sorvegliati da telecamere. D’altro canto questi stessi apparati sono soggetti ad atti di vandalismo.
Vantaggi e svantaggi derivanti da questa tecnologia sono riassunti in questa tabella. Le tipologie dei sistemi sono suddivise in base ai supplier.
Nome prodotto Costi Vantaggi Svantaggi
Thales 20 K£ per il trial
del sistema (installazione esclusa)
Ogni tre anni consigliata la sostituzione delle lenti Deterrente per le violazioni Permette il rilevamento e la classificazione di oggetti a dimensione variabile Forte dipendenza dalla
variazione delle condizioni climatiche e dalla
presenza di nuvole e nebbia
Il sistema non è in grado di riconoscere il materiale che costituisce l’oggetto
Chirson Dipendente dai
requisiti software Siemens
29 1.4.4 Induction loop
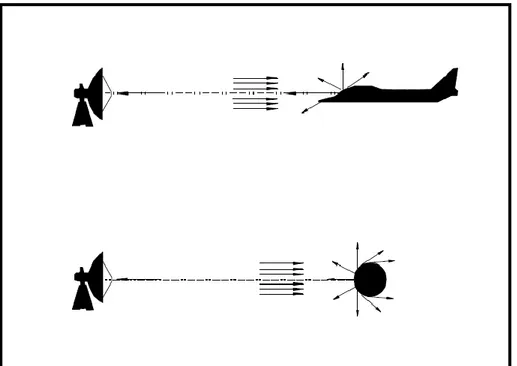
Una spira a induzione consiste di un cavo , contenente un filo “transceiver” (trasmettitore e ricevitore) , disposto in un ciclo in modo da creare un campo elettromagnetico . E 'usato per rilevare oggetti metallici (cioè non pedoni) ed è attualmente ampiamente utilizzato per il rilevamento dei veicoli (ad esempio per rilevare la congestione del traffico, le statistiche di utilizzo dei parcheggi in base ai conteggi dei veicoli). Il loop emette un campo elettromagnetico ( debole) . Un oggetto metallico entrando nell'area del loop perturba il campo elettromagnetico e induce una corrente la quale viene processata. Analisi di tale segnale di uscita può determinare la velocità e la dimensione dell'oggetto passato sopra il campo . Inoltre , il tipo di veicolo può essere classificato (per intensità di corrente indotta) e il numero di veicoli (censimento) può essere monitorato periodicamente .
Figura 7: Utilizzo di Induction loop per il rilevamento di un automobile
Gli svantaggi di questa tecnologia di rilevamento sono che metalli diversi hanno diverse induttanze .Vi è inoltre un crescente numero di veicoli stradali costituito da fibra di vetro e alluminio , fornendo una corrente indotta inferiore rispetto a quella dell'acciaio. Un'altra difficoltà è l'installazione e la manutenzione dei loop in quanto questi sono al posizionati al di sotto della superficie del manto stradale.
30 Un’opzione alternativa è quella di installare i loop a induzione tra le rotaie. Ciò facilita il rilevamento direttamente sul passaggio a livello ed evita di dover intervenire sulla rete stradale. Un metodo simile a quello discusso è attualmente installato in Svezia. Questa configurazione però risente dei disturbi causati dalle vibrazioni delle rotaie i quali riducono sensibilmente la sensibilità di questi sensori durante l’attraversamento di un treno. Li dove sono presenti rotaie elettrificate il disturbo si accentua ancora di più.
Le contromisure più adottate in questi caso sono la deattivazione dei sensori nel momento in cui le barriere sono completamente abbassate e l’analisi della corrente di uscita con degli appositi software in grado di capire se l’oggetto rilevato è un treno in movimento o un ostacolo rimasto sulle rotaie.
La prossima tabella mostra vantaggi e svantaggi di tale tecnologia.
Nome prodotto Costi Vantaggi Svantaggi
Peek traffic 3 K£ per 6 loop
all’entrata e all’uscita del PL
2K£ per loop posti sulla linea ferrata
2.5K£ per l’installazione delle apparecchiature di processamento dei segnali in uscita Tecnologia testata Robusta agli agenti esterni Difficilmente colpita da atti vandalici
Capacità di classificazione dei veicoli
Rileva solamente i veicoli o comunque ostacoli metallici Difficoltà di manutenzione Treni e rotaie interferiscono con il loop installati sulla linea ferrata Golder River
31
2 IL PROGETTO SIMPLE E LA TECNOLOGIA RADAR
Nel capitolo precedente si è dato risalto al fatto che i principali gestori delle reti ferroviarie dei paesi tecnologicamente più evoluti stiano investendo capitali considerevoli nella ricerca di nuove soluzioni per garantire maggior sicurezza ed efficienza su varie infrastrutture fra cui i passaggi a livello. Tecnologie consolidate in altri ambiti (navale, aeronautico, urbano) possono essere infatti sfruttate per questo fine.
In Italia negli ultimi anni l’ammodernamento dei servizi volti ai cittadini e alla Pubblica Amministrazione attraverso i moderni strumenti ICT (Information and Communication Technologies
cittadino nei suoi spostamenti quotidiani.
con sedi proprio nel territorio toscano.
In questo capitolo verrà posto l’accento sulle tecnologie utilizzate nel progetto SIMPLE specialmente quelle riguardanti il monitoraggio del passaggio a livello.
2.1 Il progetto SIMPLE
Il progetto SIMPLE ha principalmente due obiettivi:
1. fornire servizi per la sicurezza in ambito ferroviario, attraverso l’impiego di un sistema tecnologicamente avanzato per il monitoraggio e l’elaborazione delle informazioni raccolte sulla linea ferroviaria in prossimità dei passaggi a livello;
2. contribuire alla gestione della m
l’informazione e la comunicazione che consentano di ottenere un’ottimizzazione dei flussi di traffico nelle aree limitrofe.
32 Per quanto riguarda il primo aspetto, si prevedono:
l’impiego di sensori radar, telecamere o altri dispositivi di tecnologia avanzata per il monitoraggio della linea sul passaggio a livello;
la realizzazione di un sistema per l’elaborazione dati e la discriminazione delle situazioni di pericolo;
l’implementazione della logica di comunicazione con i sistemi di sicurezza di terra e a bordo treno incaricati di attivare le adeguate procedure di emergenza.
Per quanto concerne invece la parte di sistema de saranno impiegati i seguenti componenti:
un sistema di acquisizione dei dati di transito dei treni;
un sistema di acquisizione e memorizzazione dello stato dei PL;
un sistema di acquisizione degli orari stimati dei treni e delle loro posizioni in tempo reale;
un sistema di sensori e altri dispositivi hardware per la raccolta, la trasmissione e l’archiviazione di dati eterogenei quali il flusso di traffico ed il livello di congestione nell’area del PL e nelle aree circostanti e i tempi di attesa per l’attraversamento.
Con il progetto SIMPLE pertanto si vuole studiare un sistema, affidabile e con livello di sicurezza adeguato, per il monitoraggio continuo dell’area con invio di allarme all’infrastruttura di segnalamento in caso di pericolo di incidente e che impieghi sensori basati su tecnologia radar
offrire servizi a valore aggiunto per l’utente: disponibilità di informazioni sui tempi di percorrenza, calcolo di percorsi alternativi, avvisi in tempo reale in caso di situazioni critiche nell’area monitorata, indicazione della lunghezza delle code di veicoli in attesa al PL.
Nella prossima immagine viene mostrata l’architettura di massima del sistema SIMPLE per quanto riguarda l’aspetto di monitoraggio del passaggio a livello.
33 Figura 9: Sistema SIMPLE per il monitoraggio dei passaggi a livello
Nella figura è possibile identificare distintamente le varie parti che compongono i vari sottosistemi:
Ogni nodo SIMPLE è genericamente costituito da un Sensore Radar (SR) per la detezione dell’ostacolo, un Sottosistema Video (SV, telecamera + Digital Video Recorder) per la visualizzazione dell’ingombro e un Sistema di Elaborazione (SE) che ha il compito di valutare la congruenza delle informazioni ricevute dal radar e di segnalare l’ostacolo al segnalamento ferroviario
I nodi SIMPLE sono connessi al segnalamento ferroviario. Nel momento in cui un ostacolo viene individuato parte una segnalazione che può causare l’arresto del treno al fine di evitare conseguenza catastrofiche.
Postazioni Remote (PR) sono in grado di ricevere attraverso un server (Server PR) informazioni periodiche o episodiche riguardanti lo stato dei passaggi a livello monitorati.
34 Le stesse informazioni vengo utilizzate dal Sistema di Gestione della Viabilità (SGV) per segnalazioni agli automobilisti su eventuali ritardi sui tempi di attraversamento o per l’indicazione di percorsi alternativi.
Va sottolineato che nel momento in cui viene segnalata una situazione di pericolo, un operatore che visiona la Postazione Remota può osservare la situazione attraverso le informazioni visive e verificare l’esattezza della segnalazione partita dal sottosistema radar.
2.2 I sensori radar
La tecnologia ra
settore ferroviario per migliorare i tempi di individuazione di ostacoli che nelle soluzioni attuali prevedono il coinvolgimento dell’operatore umano.
Particolare attenzione deve essere posta nei meccanismi e nelle soluzioni architetturali cosi da mantenere il livello di sicurezza attuale.
Verranno di seguito illustrati gli aspetti di questa tecnologia con particolare riferimento alle caratteristiche dei sensori e delle tecniche di detezione adottate nel progetto SIMPLE.
2.2.1 Il principio di funzionamento e le logiche decisionali per il rilevamento degli ostacoli
I sensori radar sono in grado di monitorare un’area ben delimitata: essi irradiano onde elettromagnetiche le cui frequenze possono variare dai 225 MHz ai 35 Ghz2. Quando viene ricevuta un’eco, ciò significa che l’onda elettromagnetica ha colpito la superficie di un oggetto ed è stata riflessa.
2
Tipicamente per i radar vengono utilizzate le microonde. L’uso di alte frequenze permette una maggior penetrazione di nebbia, fumo e pioggia.
35 Eseguendo un’analisi dell’eco è possibile determinare distanza, posizione e, in alcuni casi, anche la velocità dell’oggetto rilevato. La distanza viene determinata dal tempo impiegato dall’onda riflessa per essere rilevata in base alla seguente formula :
con distanza dal bersaglio, c velocità della luce e ritardo dell’impulso ricevuto.
Figura 10: Calcolo della distanza dal target T
Attraverso gli angoli di elevazione e di azimuth che l’eco forma con l’antenna è possibile definire la direzione.
Direzione e distanza definiscono univocamente un oggetto nello spazio tridimensionale.
36 Il concetto di “dimensione” di un oggetto visto da un radar non è esattamente quello a cui istintivamente siamo legati in base alle nostre percezioni sensoriali: mentre per l’essere umano le dimensioni di un corpo sono essenzialmente l’insieme delle misure di questo sul piano o nello spazio, per il radar sono legate alla radiazione riflessa la quale a sua volta non è legata solamente all’estensione o al volume ma anche ad altre proprietà fisiche dell’oggetto.
Pertanto risulta fondamentale definire il concetto di “target piccolo o grande” per il radar in quanto, per il corretto funzionamento di un sistema di rilevamento ostacoli, è necessario che il radar segnali situazioni di pericolo solamente in caso di oggetti sufficientemente grandi capaci di causare danni.
Dobbiamo quindi adesso descrivere il concetto di Radar Cross Section.
2.2.2 L’equazione radar e la Radar Cross Section
Dopo essere stato irradiato dal segnale emesso dal radar un oggetto riflette una parte dell’energia ricevuta. Per la maggior parte dei radar l’equazione che mette in relazione potenza trasmessa e potenza intercettata da un radar è la seguente:
Dove :
è la densità di potenza riflessa ricevuta dal radar alla distanza R dall’oggetto in direzione
è la potenza irradiata dall’antenna (potenza di picco) è il guadagno d’antenna in direzione
è la Radar Cross Section
è l’area efficace d’antenna in direzione
Nell’equazione il termine rappresenta la densità di potenza (watt per metro quadrato) che il trasmettitore radar emette. Questa è intercettata dall’oggetto con una RCS (misurata in ). Il prodotto tra questi due termini fornisce quindi l’ipotetica potenza totale intercettata
37 dall’oggetto. Il secondo termine al denominatore rappresenta la diffusione isotropica3 della potenza ricevuta la quale viene ritrasmessa verso il radar e rilevata dall’antenna con un’area efficace .
Tra le grandezze in gioco si può notare come l’RCS non sia dipendente dalla distanza radar-oggetto ne dalla direzione dell’antenna. Infatti la RCS è una misura di quanto è intrinsecamente rilevabile un oggetto per un radar: una RCS maggiore indica che un oggetto è rilevato più facilmente.
Per far comprendere più facilmente il concetto di RCS la si può definire come un confronto tra l’intensità del segnale riflesso dall’oggetto rilevato e quella di una sfera perfettamente liscia avente sezione di 1 . Da quest’ultima definizione deriva la presenza del termine di riflessione isotropica illustrata in precedenza nell’equazione radar in quanto questo tipo di diffusione della radiazione è possibile solamente per oggetti perfettamente sferici.
Figura 12:Concetto di RCS
Quantitativamente la RCS può essere calcolata nelle tre dimensioni secondo la seguente equazione :
3
Si ha diffusione isotropica quando la radiazione elettromagnetica viene irradiata con la stessa intensità lungo tutte le direzioni
38 Dove :
la densità di potenza incidente misurata sul target è la densità di potenza riflessa vista ad una distanza
Ovviamente per oggetti reali e dalla forma complessa questo calcolo viene eseguito attraverso simulazioni al computer eseguite da opportuni software o con la misurazione reale sul campo e/o in camera anecoica4.
Questo perché l’RCS dipende in parte dalle dimensioni assolute (ci si aspetta infatti che oggetti grossi abbiano RCS maggiore di oggetti piccoli) e in parte da altri parametri:
Materiale di cui è composto l’oggetto: i metalli riflettono fortemente e tendono a riprodurre un segnale forte; legno, stoffe, plastiche o fibre di vetro riflettono di meno e in alcuni casi possono risultare addirittura trasparenti (quest’ultime vengono addirittura impiegate per la costruzione di tensostrutture per la protezione di antenne radar). In campo militare alcuni aerei vengono rivestiti di vernice in grado di assorbire i segnali trasformando l’energia ricevuta in calore.
Angoli di incidenza e di riflessione: angoli piccoli indicano raggi trasmessi e riflessi vicino alla direzione normale e quindi segnali più forti.
Superfici non piatte: il rilievo di una superficie potrebbe contenere rientranze e spigoli che fungono da retroriflettori incrementando la RCS per molte delle direzioni di incidenza dei raggi.
Dimensioni dell’oggetto relative alla lunghezza d’onda del raggio emesso: mentre per le sfere la RCS è indipendente dalle frequenze trasmesse (essa è infatti costante a
con raggio della sfera) per gli oggetti di altre forme ciò non è più vero.
La figura successiva mostra quanto detto per una superficie piana.
4
Una camera anecoica è un ambiente di laboratorio strutturato in modo da ridurre il più possibile la riflessione di segnali sulle pareti
39 Figura 13: RCS di una superficie piana in funzione della lunghezza d'onda e dell’altezza h
2.2.3 Probabilità di Mancata Detezione e Probabilità di Falso Allarme
L’equazione radar descritta in precedenza non prende in considerazione il fatto che il segnale in uscita dallo stadio di RX presenta due componenti di rumore:
Clutter: echi da bersagli ambientali quali terra, mare, pioggia; Rumore termico: rumore di origine interna al ricevitore.
Tipicamente il rumore termico è descritto dalla seguente equazione:
Dove:
è la potenza del rumore RX riportata in antenna costante di Boltzmann
290 K
banda dell’antenna
figura di rumore del ricevitore
Se al momento trascuriamo i disturbi ambientali possiamo definire il Rapporto Segnale Rumore (SNR) in uscita dal ricevitore come:
40 Quello che il radar deve fare per rilevare la presenza di un ostacolo è un confronto tra il segnale ricevuto e una soglia di rumore intrinsecamente sempre presente nell’elettronica che costituisce il ricevitore. Se il segnale supera quella soglia allora esso è stato riflesso da un ostacolo.
Figura 14: Inviluppo del segnale ricevuto nel tempo
Quanto detto riguardo ai disturbi ci fa capire che nella realtà i radar possono avere un comportamento disatteso che si concretizza nella mancata rilevazione di un ostacolo o nella rilevazione di un ostacolo che non è realmente presente nell’area di osservazione.
Questi due eventi sono rappresentati dalla Probabilità di Detezione ( ) , Probabilità di Mancata Detezione ( ) e Probabilità di Falso Allarme ( ). Queste probabilità sono intrinsecamente legate al SNR in ricezione secondo la funzione di Marcum e si riferiscono alla rilevazione legata ad un singolo impulso emesso dall’antenna.
41 Figura 15: Probabilità di detezione in funzione del rapporto segnale-rumore
2.2.4 Condizioni atmosferiche e multipath
La presenza dell’atmosfera e le condizioni meteo influenzano negativamente le prestazioni del radar a causa dell’assorbimento e diffusione delle onde elettromagnetiche. Questa attenuazione (misurata in dB/Km) ha una forte dipendenza dalla frequenza del fascio emanato dalle antenne.
Nel caso di attenuazione dovuta all’atmosfera è predominante l’assorbimento di ossigeno e vapore acqueo.