2 Stato dell’arte nella modellazione di motoveicoli e
sistemi di controllo
In questo capitolo si cercherà di descrivere sinteticamente alcuni dei lavori riportati fino ad oggi in letteratura, relativi sia alla definizione di modelli matematici di veicolo (per lo studio della stabilità e della dinamica del sistema), sia all’ideazione di sistemi di controllo e di “guida virtuale” di veicoli a due ruote.
2.1 Stato dell’arte nella costruzione di modelli dinamici di
motoveicolo
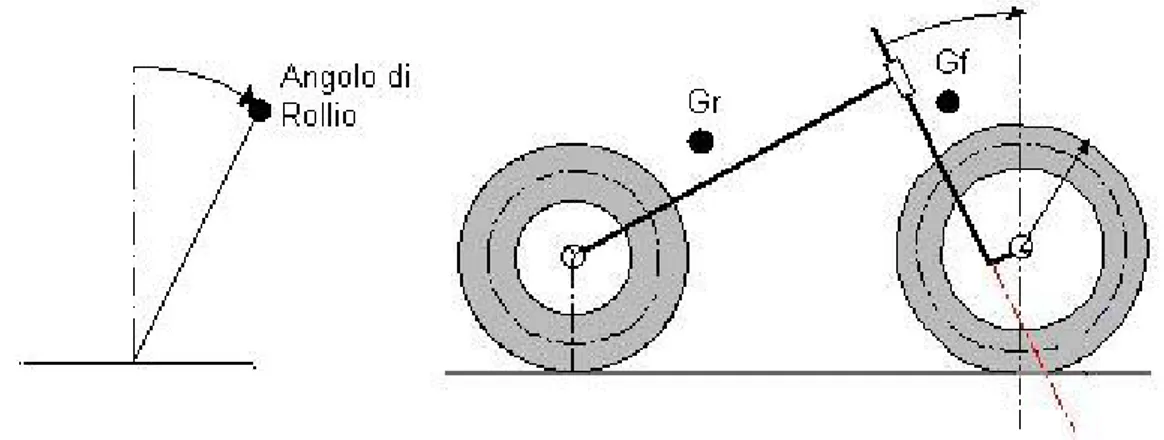
La dinamica dei motoveicoli è stata ampiamente studiata dopo la realizzazione del modello teorico di Sharp [1] nel 1971. Il modello teorico in questione è costituito da due corpi, avantreno e retrotreno-pilota, collegati assieme tramite una coppia rotoidale che schematizza l’asse di sterzo (Figura 2.1). Il sistema studiato parte dall’ipotesi di sospensioni rigide, velocità longitudinale imposta, effetti giroscopici trascurabili, pneumatici lineari ‘rilassati’ e ha quattro gradi di libertà. Quest’ultima affermazione è giustificabile tenendo presente che, nello spazio, i due corpi avrebbero in tutto dodici gradi di libertà ma il vincolo che li collega ne toglie ben cinque, lasciando le tre rotazioni e le tre traslazioni del retrotreno più la rotazione dell’avantreno attorno alla cerniera; il contatto con la strada, inoltre, leva altri due gradi di libertà ossia la rotazione di beccheggio e lo spostamento verticale del retrotreno (che sarà perciò legato alla rotazione di rollio e alla rotazione dello sterzo). Essendo infine la velocità longitudinale del veicolo imposta a priori, in definitiva rimangono i seguenti gradi di libertà: spostamento laterale, rotazioni di imbardata e di rollio del retrotreno e rotazione dell’avantreno intorno all’asse di sterzo.
Le equazioni scritte da Sharp sono state linerizzate intorno alla posizione verticale del veicolo (rollio nullo) con ovvie restrizioni sul loro campo di utilizzo. Lo studio delle suddette equazioni ha dimostrato l’esistenza, per la dinamica laterale dei motocicli, di tre modi principali di vibrare:
• modo Capsize: è un modo non oscillatorio, caratterizzato dal tempo necessario alla caduta del motoveicolo e quindi è relativo al rollio (Figura 2.2). Questo modo esprime il fatto che un veicolo a due ruote, senza controllo sullo sterzo, se perturbato dalla posizione di equilibrio verticale in marcia rettilinea, cade in un tempo più o meno lungo (τ=5-10 s, detta costante di tempo). Il veicolo a due ruote è perciò intrinsecamente instabile, tanto di più quanto minore è la suddetta costante di tempo. Solo con un adeguato controllo da parte del pilota è possibile “stabilizzare” il modo Capsize.
Figura 2.2 – Modo capsize.
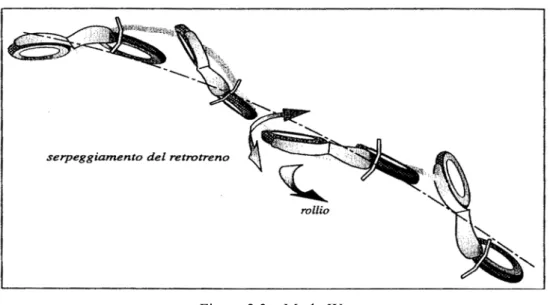
• Modo Weave: è un modo oscillatorio che coinvolge sia il rollio che l’imbardata dell’intero veicolo (vedi Figura 2.3 ). In genere le oscillazioni legate a questo modo sono ben smorzate, ma possono diventare importanti o addirittura portare all’instabilità a seconda delle condizioni di moto del sistema, della configurazione del veicolo, del controllo da parte del pilota, ecc.. Le frequenze proprie del modo di Weave sono di circa 1-4 Hz.
Figura 2.3 – Modo Weave.
• Modo Wobble: è caratterizzato principalmente dall’oscillazione dell’avantreno attorno all’asse di sterzo (Figura 2.4 ). Il modo wobble può essere più o meno smorzato a seconda della velocità di marcia, della geometria dell’avantreno, di un eventuale ammortizzatore di sterzo e delle azioni di controllo del pilota sullo sterzo. Le frequenze proprie del modo di Wobble sono di circa 4-10 Hz e possono essere pericolose in quanto difficilmente controllabili dal pilota a causa della loro elevata frequenza.
Figura 2.4 – Modo Wobble.
Gli studi sulla dinamica del veicolo a due ruote sono progrediti, negli anni seguenti la pubblicazione dell’articolo di Sharp, con lo sviluppo di modelli sempre più accurati e complessi in cui, al modello sopra citato, sono state aggiunte varie caratteristiche quali la presenza di sospensioni [2], il movimento della parte superiore del pilota [3], la flessibilità
del retrotreno (in senso torsionale) e dell’avantreno (flessione delle forcelle) [4]; schemi dei modelli in [3] e in [4] sono riportati in Figura 2.5 e Figura 2.6.
Figura 2.5 – Modello con busto capace di ruotare rispetto al retrotreno [3].
Figura 2.6 – Modello con telaio deformabile e rotazione del busto del pilota [4].
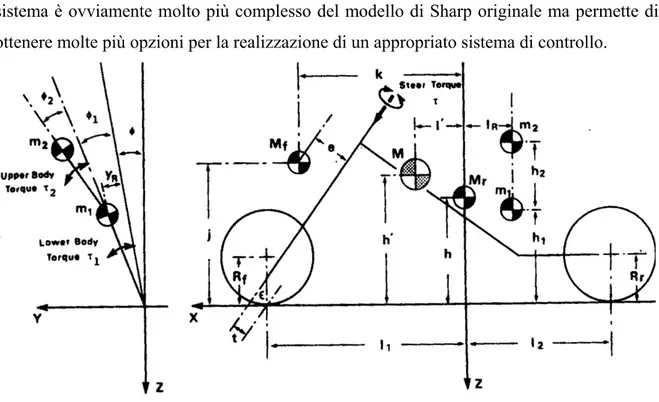
Alcuni autori hanno studiato il problema considerando il busto del pilota suddiviso in più “segmenti” capaci di ruotare fra loro intorno ad assi longitudinali paralleli. Ad esempio in [5] il busto è stato diviso in due parti, una inferiore e l’altra superiore introducendo quindi due cerniere, una fra la parte superiore e quella inferiore e una fra la parte inferiore e il retrotreno del veicolo e con asse coincidente con la congiungente i punti di contatto fra i pneumatici e l’asfalto (vedi Figura 2.7). Due coppie denominate τ2 e τ1 comandano
rispettivamente la rotazione relativa fra busto superiore e inferiore e fra busto inferiore e retrotreno. La coppia τ3 comanda la rotazione dell’avantreno intorno all’asse di sterzo. Il
sistema è ovviamente molto più complesso del modello di Sharp originale ma permette di ottenere molte più opzioni per la realizzazione di un appropriato sistema di controllo.
Figura 2.7 – Modello con busto del pilota suddiviso in due parti.
Grazie allo sviluppo di calcolatori sempre più potenti e veloci, negli ultimi anni, il problema della dinamica laterale dei veicoli a due ruote è stato affrontato con l’uso di codici multibody spesso creati appositamente per questo scopo, quali ADAMS, LMS. DADS, MSC. Visual NASTRAN, ecc ([7]-[9]). Questa tecnica permette di operare simulazioni al calcolatore capaci di riprodurre in modo sufficientemente accurato il comportamento reale del motociclo comandato da un’adeguata logica di controllo. Un esempio di modello multibody è riportato in Figura 2.8.
a) b)
Modelli analitici di sistemi semplici, implementati grazie a programmi quali, ad esempio, Matlab-Simulink, o modelli multibody di sistemi anche più complessi, hanno permesso di compiere simulazioni ben validate da prove sperimentali e sono diventate un fattore molto importante durante la fase di prototipazione di nuovi modelli di veicolo.
2.2 Stato dell’arte nelle tecniche di controllo dei motoveicoli
Un aspetto rilevante nell’analisi della dinamica dei veicoli è la modellazione del pilota in quanto condiziona notevolmente i risultati ottenuti soprattutto per ciò che riguarda i transitori. La complessità del problema deriva dalla grande varietà di fattori da considerare: quelli fisiologici (prontezza di riflessi, sensibilità di guida), i criteri con i quali la manovra viene pianificata (minimo tempo, minimo rischio, minimo consumo, etc.), la diversa esperienza e i vari stili di guida. Capire come un pilota effettivamente guida il motoveicolo è stato per anni ed è tuttora un dibattito piuttosto acceso fra i vari studiosi, i quali hanno proposto una gran quantità di “piloti virtuali” ognuno con una logica di controllo (ossia uno stile di guida) differente.Si può fare una prima classificazione delle varie tipologie di controllo presenti in letteratura a seconda che esso sia:
• di tipo classico (PID) • basato sulla logica fuzzy • basato sulle reti neurali • di tipo ibrido.
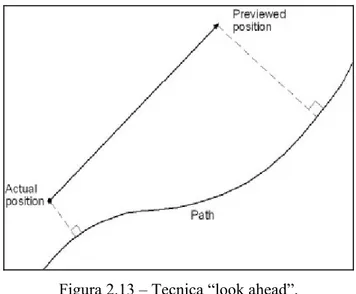
Una seconda classificazione può esser fatta distinguendo fra Compensation Tracking Models e Preview Tracking Models (argomento ampiamente affrontato in [10]). I primi sono modelli in cui i comandi di controllo del veicolo vengono calcolati prendendo in retroazione le informazioni sullo stato attuale del sistema senza predizione dello stato futuro; i secondi, sono modelli che, in base alle informazioni dello stato attuale, predicono lo stato futuro del sistema (per questo chiamate anche tecniche “Look-Ahead”) e, in base a quest’ultimo, calcolano le azioni di controllo necessarie. La tipica struttura dei due sistemi è rappresentata in Figura 2.9 ove i blocchi G(s) e H(s) rappresentano rispettivamente la dinamica del sistema veicolo-pilota e la logica decisionale di controllo, mentre P(s) e B(s) sono rispettivamente la previsione della traiettoria desiderata (è un input previsto) e la previsione della posizione futura del veicolo; la loro differenza costituisce l’errore di traiettoria previsto e sarà l’ingresso per il blocco H(s) relativo al controllo vero e proprio.
Figura 2.9 – Schemi di: a) compensation tracking models; b) preview tracking models.
Le tecniche Look-Ahead sono giudicate molto più vicine al comportamento umano rispetto ai modelli a compensazione e portano ad errori di traiettoria minori; per questi motivi hanno man mano portato all’abbandono di questi ultimi.
Un fattore comune a quasi tutti i tipi di controllo riguarda il ritardo di risposta fisiologico che ogni pilota possiede e che non si può eliminare. Quindi, non potendo essere istantanei, i comandi del guidatore devono essere sfasati di un certo tempo Tp, detto ritardo
di risposta e che in letteratura è scelto in genere fra 0.1 s (guidatore più attento) e 0.3s (guidatore meno attento). Matematicamente questo ritardo può esser espresso con un’equazione differenziale del primo ordine come la (2.1) ove φ è la grandezza “ritardata” e
f(t) una generica funzione del tempo:
(2.1) Tp ⋅ &φ+φ=f(t)
2.2.1 Controlli di tipo classico
In letteratura, nella maggior parte dei lavori che utilizzano controlli di tipo PID, le azioni esercitate dal pilota sul veicolo sono la coppia allo sterzo e le eventuali coppie applicate fra le varie parti del busto e il retrotreno del motoveicolo (o in alternativa le loro rotazioni relative). Le azioni di controllo variano da autore ad autore e per calcolarle possono essere utilizzate varie grandezze in retroazione come l’errore (previsto) di posizione e direzione, la loro derivata prima rispetto al tempo, la velocità di imbardata, l’angolo di rollio e la velocità di rollio.
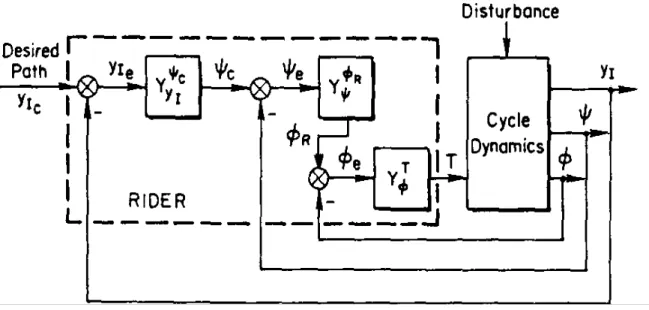
In [3], Weir propone un “pilota virtuale” costituito da un compensatore ad anelli multipli e struttura parallela (Figura 2.10).
Figura 2.10 – Controllo realizzato tramite coppia allo sterzo e inclinazione del busto ([3]).
Esso prende in ingresso l’angolo di imbardata ψ, la traiettoria desiderata YIC, la
posizione attuale YI e l’angolo di rollio φ; esso fornisce come azioni di controllo sul veicolo
la coppia allo sterzo (T) e l’angolo di inclinazione del busto del pilota rispetto al veicolo (φR). L’anello interno serve per stabilizzare il rollio del veicolo (modo proprio capsize),
ossia il pilota virtuale, utilizzando la coppia allo sterzo, permette al motoveicolo di non cadere. Una volta che il rollio del veicolo viene stabilizzato, è possibile correggere l’errore di traiettoria del veicolo tramite altri due anelli che portano in retroazione l’angolo di imbardata e l’errore di traiettoria; questi ultimi vengono elaborati per estrapolare il valore desiderato dell’angolo di inclinazione del pilota rispetto al veicolo φR. In pratica l’azione di
φR serve a costringere il pilota virtuale a sterzare per non cadere (contrastando lo
sbilanciamento del busto) e il segno di φR è scelto in modo che queste correzioni di sterzo
diminuiscano anche l’errore di traiettoria. Il controllo così descritto è stato applicato in [3] ad un modello puramente analitico e quindici anni dopo in [9] è stato applicato anche ad un modello multibody costruito con codice ADAMS.
Figura 2.11 – Controllo realizzato tramite la sola coppia allo sterzo.
In Figura 2.11 è presentata una variante del controllore precedentemente descritto, suggerita da Weir in [3]. Tale controllo è più semplice e si propone di guidare il veicolo senza intervenire con lo spostamento del busto che di conseguenza è collegato rigidamente al telaio del motoveicolo. In questo caso la correzione φR agisce direttamente sulla coppia di
sterzo permettendo quindi al veicolo di compiere variazioni di traiettoria finché l’errore di posizione non si annulla.
In [5] viene proposto un modello di guidatore capace di applicare una coppia allo sterzo
τ e di inclinare le parti inferiore e superiore del corpo applicandovi le coppie τ1 e τ2
rispettivamente (vedi Figura 2.7). Tali coppie sono determinate in base alle seguenti relazioni: (2.2)
d
k
k
d
k
k
d
k
k
Ud U Ld L sd s⋅
+
⋅
=
⋅
+
⋅
=
⋅
+
⋅
=
φ
τ
φ
τ
φ
τ
φ φ φ 2 1dove φ è l’angolo di rollio del motociclo e d rappresenta l’errore tra la traiettoria prevista e quella desiderata. Nel controllo è quindi applicata una tecnica di preview tracking per il calcolo di d: l’errore previsto è ottenuto calcolando gli errori futuri (Y) che farebbe il veicolo se proseguisse il moto con velocità costante (vedi Figura 2.12); viene poi fatta una media pesata dei suddetti errori usando come pesi i valori di una funzione di distribuzione gaussiana (W) centrata nel punto preso presumibilmente a riferimento dal pilota per pianificare la manovra (a distanza LR dalla posizione attuale del veicolo). In questo modo
Figura 2.12 – Calcolo dell’errore previsto [5].
Per mettere in evidenza l’importanza delle tre coppie di controllo è stata simulata una manovra di cambio di corsia applicando le coppie una alla volta: si osserva che l’azione di controllo principale è effettuata mediante la coppia di sterzo e la parte inferiore del corpo è utilizzata per applicare una coppia proporzionale a quella di sterzo. La coppia applicata con la parte superiore del corpo è ininfluente come azione di controllo e da confronti con i risultati sperimentali si nota che viene utilizzata per mantenere verticale il corpo del guidatore, ovvero per questioni di comfort. È stata effettuata una validazione del modello sulla base di dati sperimentali che ha consentito di scegliere opportunamente i valori delle costanti moltiplicative che compaiono nelle espressioni (2.2).
In [7] viene proposto un altro controllore che sfrutta la tecnica look-ahead: questo calcola l’errore di traiettoria previsto (d) ipotizzando che il veicolo fra l’istante t e l’istante
t+∆t prosegua con velocità v(t) costante (Figura 2.13):
(2.3) d(t)= pT(t+∆t)−(pV(t)+v(t)⋅∆t)
ove pT(t) e pV(t) sono rispettivamente i vettori posizione della traiettoria desiderata e del
Figura 2.13 – Tecnica “look ahead”.
Utilizzando d(t), la sua derivata rispetto al tempo, l’angolo e la velocità di rollio, viene calcolata la coppia allo sterzo τ mediante la relazione
(2.4) τ(t)=K1⋅φ(t)+C1⋅φ&(t)+K2 ⋅d(t)+C2 ⋅d&(t)
Il controllo descritto è applicato ad un modello multibody di motoveicolo (Figura 2.8) e ha permesso di realizzare simulazioni di manovre in curva a raggio costante e slalom. La difficoltà principale che si deve affrontare in questo tipo di controllo consiste nella determinazione delle giuste costanti K1, K2, C1, C2 da inserire nella (2.4); per questo motivo
sono state effettuate prove sperimentali su strada permettendo così di tarare le suddette costanti in modo da far coincidere il più possibile i risultati delle simulazioni e quelli sperimentali.
In [8] il motoveicolo è stato modellato tramite due diversi codici multibody e sono stati confrontati i risultati delle simulazioni dei due modelli comandati però dal medesimo controllore. Anche in questo caso il veicolo viene controllato tramite la sola coppia allo sterzo τ che viene valutata secondo la relazione
(2.5) τ(t)=K1⋅(φd(t)−φ(t))+C1⋅φ&(t)
ove φ(t) è l’angolo di rollio e φd(t) è l’angolo di rollio desiderato. Questa tecnica non
prevede alcuna correzione dell’errore di traiettoria ma impone il percorso da seguire con l’imposizione dell’angolo di rollio (variabile nel tempo) necessario a compiere la traiettoria voluta. È perciò necessaria la conoscenza dell’andamento di φd(t) relativo al percorso che si
vuol far compire al motoveicolo; benché ciò non sia un problema per percorsi semplici e stazionari (quali una curva a raggio e velocità costante), può essere difficoltoso in manovre più complesse e soprattutto durante i transitori.
I metodi sopra esposti presentano tutti la necessità di fornire in ingresso un preciso percorso da seguire. In [11], invece, viene proposto un pilota virtuale per motocicli capace di scegliere la propria traiettoria fra le infinite possibili all’interno dei confini della strada da seguire. Questo viene definito dagli autori “metodo della manovra ottima”: esso si propone di trovare gli ingressi ottimi, ossia le migliori azioni di controllo che il pilota può esercitare per guidare il veicolo da un punto iniziale ad un punto finale rispettando tutti i vincoli esterni come la geometria della strada, l’aderenza dei pneumatici, la coppia massima erogabile dal motore, i tempi di risposta del guidatore, ecc. Le migliori azioni di controllo sono scelte in base ad un criterio di efficienza che, a seconda dei casi, può essere quello del minimo tempo, del minimo rischio, del minimo consumo di combustibile, ecc. Da un punto di vista matematico si tratta di minimizzare una funzione di penalità che descrive il criterio di efficienza scelto. Il metodo della manovra ottima calcola perciò una traiettoria che un pilota ideale riesce ad effettuare con un veicolo reale per garantire determinate prestazioni; è però chiaro che la traiettoria reale del veicolo compiuta da un pilota reale sarà in genere diversa da quella valutata dal metodo della manovra ottima, in quanto il modello di pilota utilizzato è soltanto una semplificazione e un’approssimazione di quello reale. Per tener conto del fatto che il pilota ha un tempo di reazione non nullo e che può avere limiti sulla visuale della strada, la manovra viene ripianificata a determinati intervalli di tempo per correggere gli errori sul percorso. Ciò significa calcolare il percorso ottimo dopo ogni intervallo di tempo, in genere corrispondente al tempo di risposta del pilota, variando le condizioni al contorno del problema man mano che il pilota vede le porzioni di strada seguenti. Quindi ad ogni intervallo di tempo cambiano le condizioni iniziali e le condizioni al contorno del problema che il metodo della manovra ottima deve risolvere.
Lo schema a blocchi che illustra il metodo è riportato in Figura 2.14, dove sono indicati il blocco di pianificazione della manovra, basato sul metodo della manovra ottima, ed il blocco di esecuzione della manovra, che ha il compito di fornire gli ingressi di controllo ottimi tenendo conto anche dei limiti fisiologici del guidatore.
Grazie alle caratteristiche descritte, il metodo della manovra ottima permette di rappresentare diversi stili di guida semplicemente cambiando il criterio di ottimizzazione utilizzato nella determinazione della funzione di penalità.
2.2.2 Accenni ai controlli basati su logica fuzzy, reti neurali e ibridi
Negli ultimi anni stanno avendo sempre più importanza tecniche di controllo innovative e capaci di riprodurre in modo sempre migliore il comportamento umano alla guida di veicoli a due e quattro ruote.
Un tipico esempio è il controllo basato su logica Fuzzy: esso può ben rappresentare la conoscenza che un uomo ha riguardo il comportamento dinamico di un sistema e i relativi comandi di controllo desiderati. L’algoritmo di controllo fuzzy esprime il comportamento del pilota in termini di relazioni qualitative descritte mediante regole logiche. In [12] viene presentato un modello di guidatore per autoveicolo basato su logica fuzzy il cui schema è riportato in Figura 2.15; altri esempi possono trovarsi in [13] e [14].
Figura 2.15 – Modello di pilota basato su logica fuzzy [12].
Un controllore di questo tipo riceve in ingresso le variabili scalari non-fuzzy e, con un’operazione di fuzzyficazione, vengono ottenute le variabili fuzzy. Questa operazione necessita la definizione di cosiddetti fuzzy-sets e, per ognuno di questi, di una funzione di appartenenza (membership function). I fuzzy-sets sono sottoinsiemi di valori presi nell’insieme di definizione della variabile non fuzzy; essi possono avere intersezione nulla ma non necessariamente; si possono ad esempio scegliere sette insiemi denominati LB (Left Big), LM (Left Medium), LS (Left Small), ZO (Zero), RS (Right Small), RM (Right
Velocità di imbardata Angolo di sterzo Spostamento laterale Velocità di imbardata Manovra desiderata Fuzzify Fuzzy Reasoning DeFuzzify Spostamento laterale Angolo di sterzo Modello del veicolo
Medium), RB (Right Big) in modo da mappare tutto l’insieme di definizione, eventualmente con sovrapposizioni di valori. Una membership function (relativa ad un i-esimo fuzzy set Ai) associa al valore della variabile non-fuzzy in ingresso (x0), un numero
che rappresenta l’appartenenza di x0 ad Ai, ossia quanto il valore di x0 è “associabile” o è
“vicino” ai valori dell’insieme Ai. Le funzioni di appartenenza vengono costruite una per
ogni fuzzy set e per ogni variabile, con l’ipotesi di distribuzione normale al variare di x0: in
Figura 2.16 sono riportate a titolo di esempio le suddette funzioni relative a sette fuzzy-sets.
Figura 2.16 – Funzioni di appartenenza delle variabili fuzzy.
La variabile fuzzy sarà perciò un vettore composto da tanti termini quanti sono i fuzzy-sets, ognuno indicante l’appartenenza di x0 al fuzzy-set corrispondente. L’algoritmo di
controllo (“fuzzy reasoning”) calcola poi le azioni di controllo fuzzy operando delle operazioni qualitative e intuitive sulle variabili fuzzy d’ingresso in base a regole logiche del tipo “IF…THEN…”. Ad esempio, se φ è il rollio e δ è l’angolo di sterzo fuzzy, si può avere:‘If φ Є LB then δ Є RB’; se si hanno due ingressi con sette fuzzy-sets per ogni ingresso, allora servono quarantanove regole. Nella teoria fuzzy ([15]) queste regole qualitative si traducono in operazioni fra vettori e matrici e il risultato sarà un vettore ossia la variabile fuzzy di uscita. Il passo successivo è la defuzzyficazione dell’output fuzzy in una variabile reale che costituirà l’ingresso al modello dinamico del motoveicolo.
Un'altra interessante tecnica di controllo applicabile ai modelli di pilota virtuale è quella delle reti neurali. Esse rappresentano un validissimo strumento di modellazione grazie alla loro abilità di “imparare” e di riconoscere schemi comportamentali, ottimi se si vuol realizzare un modello di guidatore medio. La qualità principale di queste tecniche consiste nella loro capacità di aggiornare continuamente la logica di controllo adattandosi alle specifiche caratteristiche del guidatore. In [16] è modellato un pilota per autoveicoli utilizzando un’architettura a reti neurali a due livelli il cui schema rappresentativo è riportato in Figura 2.17.
Figura 2.17 Architettura basata sulle reti neurali a due livelli
I segnali in ingresso al controllore e provenienti dai sensori, vengono inviati ai neuroni di primo livello (s1….sN), vengono pesati ed inviati al sommatore che ne opera opportune combinazioni lineari. I risultati passano poi attraverso funzioni sigmoidi (F1) che introducono delle non linearità e raggiungono i nodi di secondo livello (y1…..yN); con analogo procedimento viene infine generata l’unica uscita della rete (z). L’ottimizzazione della rete (training) viene effettuata con un algoritmo di tipo back-propagation, secondo il quale si confrontano gli output della rete con quelli ottenuti sperimentalmente (target). Gli errori calcolati sono trasmessi all’indietro nella rete per modificare e ottimizzare i pesi utilizzati (w1ij e w2ij). Queste operazioni vengono ripetute centinaia o migliaia di volte con
l’obiettivo di minimizzare lo scarto quadratico medio tra i segnali in uscita (calcolati e di target). Il grande vantaggio delle reti neurali è che l’algoritmo di controllo del guidatore non necessita di una costruzione accurata; d’altra parte il principale inconveniente è la necessità di disporre di una grande quantità di dati sperimentali che siano in grado di rappresentare sufficientemente bene il comportamento dei piloti e permettere l’ottimizzazione della rete.
Un'altra metodologia per la modellazione di pilota virtuale è quella del controllo ibrido. La caratteristica peculiare dei controlli ibridi è quella di far uso di diverse tecniche di controllo già menzionate precedentemente. Un esempio è riportato in [17], ove viene costruito un modello di pilota con struttura gerarchica (vedi
Figura 2.18 – Modello di guidatore secondo lo schema gerarchico.
Il concetto base di questi controlli è quello di suddividere l’insieme di tutte le possibili azioni e decisioni del pilota in sottosistemi più semplici e facilmente modellabili. Un algoritmo viene poi realizzato al fine di scegliere, a seconda delle condizioni in cui si trova il veicolo, uno dei sottoinsiemi suddetti (ovvero il tipo di manovra da affrontare e il modo in cui essa deve essere effettuata). Secondo lo schema riportato in figura il comportamento umano può essere suddiviso nei seguenti quattro livelli:
• Livello decisionale: in questo livello viene decisa l’operazione da compiere (ad esempio sorpasso, mantenimento di velocità costante etc.)
• Livello di pianificazione: per prima cosa ogni operazione è divisa in varie manovre semplici che sono memorizzate nel livello sottostante delle manovre; poi nel livello di pianificazione viene scelta la manovra da effettuare.
• Livello delle manovre: le manovre sono suddivise in una sequenza di azioni base memorizzate nel livello sottostante delle azioni, e nel livello delle manovre viene scelta l’azione da compiere.
• Livello delle azioni: contiene operazioni semplici come mantenere un traiettoria rettilinea o raggiungere una determinata velocità. Ad ogni istante il livello delle azioni comunica al livello delle manovre lo stato attuale del sistema e quest’ultimo decide se mantenere l’azione corrente o se comandarne un’altra.
Task Planning Task Planning Task Planning
Maneuver Maneuver Maneuver
Action Action Action
…. …. …. Task Task Decision Making Task
Ogni singola azione può essere effettuata tramite un controllore di tipo classico o usando le reti neurali. Le decisioni possono essere effettuate usando la logica fuzzy. Parallelamente a quanto visto rimane sempre attivo un giudizio di sicurezza, basato su logica fuzzy, che segnala un eventuale pericolo al livello decisionale, in modo che questo possa intervenire cambiando l’operazione impostata o fermando il veicolo.
![Figura 2.5 – Modello con busto capace di ruotare rispetto al retrotreno [3].](https://thumb-eu.123doks.com/thumbv2/123dokorg/5637783.69450/4.892.271.669.196.495/figura-modello-busto-capace-ruotare-rispetto-retrotreno.webp)
![Figura 2.10 – Controllo realizzato tramite coppia allo sterzo e inclinazione del busto ([3])](https://thumb-eu.123doks.com/thumbv2/123dokorg/5637783.69450/8.892.167.769.179.447/figura-controllo-realizzato-tramite-coppia-sterzo-inclinazione-busto.webp)
![Figura 2.12 – Calcolo dell’errore previsto [5].](https://thumb-eu.123doks.com/thumbv2/123dokorg/5637783.69450/10.892.147.764.104.525/figura-calcolo-dell-errore-previsto.webp)