Principio di funzionamento del sistema
3.1 Ipotesi semplificative
Introdurre un semplice modello del sistema, è essenziale per spiegare, in maniera intuitiva, i fenomeni che intervengono nel funzionamento dello stesso. Per poter giungere a un modello di base, è possibile formulare delle ipotesi semplificative, che permettano una descrizione analitica non eccessivamente complessa e che, senza perdere di carattere generale, facilitano la comprensione del principio di funzionamento del sistema.
Il banco prova, presentato nel precedente capitolo, riportato in Fig. 3.1, è una implementazione del modello del veicolo, semplificata in base alle ipotesi alla base del modello stesso, ed è utilizzato per rilevare, in linea di massima, il comportamento del modello nell'ambito di tali ipotesi.
La principale ipotesi, è di supporre lineare il comportamento delle sospensioni, sia riguardo alle forze di smorzamento, sia a quelle elastiche. L'ipotesi di linearità si estende anche ai parametri caratteristici del motore in corrente continua.
Confrontando la Fig. 3.1 con quella che è l'effettiva sospensione posteriore di un motoveicolo, di cui in Fig. 3.2 è riportata una rappresentazione schematica, si può notare fin da subito che, oltre quelle citate, per la realizzazione del modello sono state formulate ulteriori ipotesi.
Fig. 3.2 – Rappresentazione schematica di una sospensione posteriore.
La prima differenza sostanziale, è nell'assenza della ruota, il che riduce il sistema analizzato ad un sistema del primo ordine..
Un'altra differenza è nella posizione della sospensione, infatti la sospensione del banco prova ha una posizione verticale, mentre è comune vedere, nei motoveicoli, sospensioni anteriori e posteriori con un certo angolo di inclinazione rispetto alla verticale, come nel caso schematizzato in Fig. 3.2. Nel caso reale quindi, per poter riportare lo studio del moto della sospensione lungo la sola
componente verticale, cioè al moto di una sospensione verticale equivalente, i parametri caratteristici, detti rigidezza ridotta e smorzamento ridotto, vanno calcolati caso per caso, in quanto dipendenti dalla particolare geometria adottata per la sospensione.
Nel caso schematizzato in Fig. 3.2, ad esempio, si avrebbe per la rigidezza ridotta, kr :
kr≃k⋅m , Y2 C
(3.1)
dove k è la rigidezza della sospensione e m ,Y
C rappresenta il rapporto fra
la velocità di deformazione della molla, che è ovviamente uguale alla velocità di scorrimento dell'ammortizzatore, e la velocità verticale della ruota.
Per lo smorzamento verticale ridotto, cr , si avrebbe:
cr=c⋅m ,Y2 C (3.2)
dove c è il coefficiente di smorzamento della sospensione (in [9] è possibile trovare il calcolo dettagliato dei parametri nell'esempio riportato).
Infine il banco prova (statico) non riproduce i disturbi che incontra il motoveicolo reale dovuti, ad esempio, alle asperità del manto stradale, alla pendenza del terreno e ai fenomeni legati alla dinamica in genere, come i trasferimenti di carico fra le ruote del veicolo in fase di accelerazione o di frenata
Infatti il carico statico su ogni ruota del veicolo dipende dalla ripartizione della forza peso:
NS f=M⋅g⋅br
pm ,
NS r=M⋅g⋅ pm−br
pm (3.3)
anteriore e posteriore, pm è il passo del motoveicolo, cioè la distanza fra gli assi
ruota, e br rappresenta la distanza del baricentro dall'asse ruota posteriore.
In condizioni dinamiche di avanzamento si ha:
Nf=NS f−S⋅
h
pm , Nr=NS rS⋅
h
pm (3.4)
dove con S si è indicata la forza di spinta, h l'altezza del baricentro da terra,
Nf e Nr i carichi dinamici rispettivamente di avantreno e retrotreno.
Nel caso di frenata, per ottenere il carico dinamico su ogni ruota, sarà sufficiente invertire il segno della forza di spinta nelle espressioni (3.4), mentre per effetto dell'angolo di rollio ≠0 si ha:
Nf=NS f−S⋅
h
pm⋅cos , Nf=NS f−S⋅
h
pm⋅cos (3.5)
Come si vede, nel passaggio del motoveicolo dal moto rettilineo a quello in curva, il carico aumenta leggermente sulla ruota anteriore, mentre diminuisce su quella posteriore a causa della dipendenza dall'angolo di rollio [9].
3.2 Sistema di regolazione sensorizzato
Si consideri un semplice sistema a un grado di libertà, in grado cioè di muoversi solo lungo una direzione, come quello di Fig. 3.3, in cui la massa sospesa M è connessa alla ruota mediante una molla di costante k e uno smorzatore di costante c .
Sotto l'azione della forza peso, la molla si accorcia di una quantità x0
M⋅g =k⋅x0 (3.6)
Quindi si ha una deformazione statica x0 proporzionale alla forza peso.
Fig. 3.3 – Sistema a un grado di libertà.
Per effetto del precarico molla x , come già esposto nel capitolo 1, è possibile intervenire sulla deformazione statica della molla stessa, al fine di mantenere simmetrica la corsa della sospensione.
Nel caso dunque di precarico x si ha:
M⋅g =k⋅x0k⋅ x (3.7)
È semplice ricavare da tale equazione:
x0=M⋅g
k −x (3.8)
È evidente, dunque, come al variare del carico statico del veicolo, cioè del termine M⋅g , sia possibile mantenere costante la deformazione statica della sospensione e conseguentemente la corsa, x0 , agendo sul precarico x . Il
primo approccio al controllo del precarico statico, è stato quello di misurare la variazione di corsa media, tramite il sensore di elongazione e inseguire un valore
di corsa media prefissata agendo in maniera opportuna sul precarico [1], [5], [6], [16].
Fig. 3.4 – Quantizzazione del precarico.
La variazione del precarico è attuata per mezzo del motore in corrente continua, di cui il sistema è dotato, variazione monitorata tramite il sensore a effetto Hall di cui è dotato il motore.
In Fig. 3.4, è rappresentata la quantizzazione del precarico su otto livelli, con il corrispondente errore sulla corsa media.
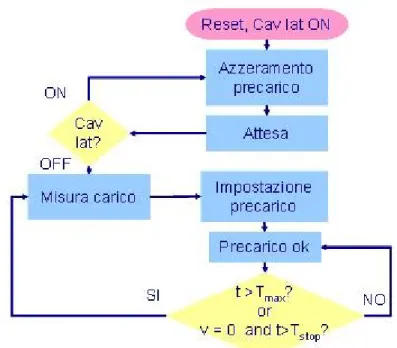
In Fig. 3.5, è riportato il diagramma di flusso dell'algoritmo di controllo utilizzato. L'algoritmo prevede, dopo una fase iniziale in cui il sistema viene resettato e preparato per la misura, il monitoraggio di alcuni parametri che sanciscono la validità della misura di corsa media, sulla base del valore riscontrato, viene effettuata una regolazione opportuna del precarico.
La misura, e di conseguenza la regolazione, viene effettuata alla ripartenza da ogni fermata significativa del veicolo e ripetuta periodicamente, fra una fermata e l'altra, con periodo Tmax .
Fig. 3.5 – Diagramma di flusso dell'algoritmo di controllo.
La fermata viene rilevata attraverso la misura della velocità del mezzo, viene riconosciuta come significativa se ha durata maggiore di Tstop , tempo
individuato come minimo necessario affinché avvenga una variazione del carico del veicolo, dovuto ad esempio alla salita di un passeggero o l'aggiunta di un bagaglio. In generale infatti, la fermata del veicolo potrebbe non essere legata ad una variazione di carico, ma alla semplice sosta al semaforo o dovuta ad un rallentamento del traffico.
Di seguito si riporta una breve descrizione degli stati, essenziali per la comprensione dell'algoritmo di controllo, implementato con una macchina a stati:
• START: è lo stato in cui entra il sistema in seguito a accensione, reset
hardware o apertura del cavalletto laterale. In questo stato vengono inizializzate le variabili utili all'esecuzione dell'algoritmo e viene comandato l'azzeramento del precarico.
• READY: il sistema è pronto per la misura, quindi se il cavalletto
laterale viene chiuso, si esegue la misura, altrimenti si rimane in attesa che questo venga chiuso o che venga riconosciuta una richiesta
di controllo remoto.
• MEASURE: è lo stato in cui viene eseguita la misura della corsa
media attuale della sospensione, in funzione dell'errore di questa, rispetto al valore di corsa media desiderato, viene selezionato il nuovo livello di precarico da impostare, infatti a ogni variazione della corsa di 2,5 mm corrisponde un livello di precarico, come evidenziato in Fig. 3.4. Prima che venga effettuata la misura, in questo stato , il sistema attende che velocità v e accelerazione acc del veicolo, rientrino negli intervalli di validità della misura ( v ∈[Velmin,Velmax] e ∣acc∣Accmax ) per un periodo minimo
fissato, per poi calcolare la corsa media su un intervallo temporale prefissato.
• PRELOAD SETTING: in questo stato viene impostato il livello del
precarico, in funzione del nuovo precarico selezionato nello stato MEASURE e di quello impostato prima della misura.
• PRELOAD SET: è lo stato di attesa, prima che venga eseguita una
nuova misura, quindi si monitora, come già detto, la durata della fermata del veicolo e il tempo trascorso dall'ultima misura.
Nell'ottica di migliorare il sistema realizzato, si è pensato ad una soluzione che non necessitasse del sensore di elongazione. Il costo dell'elettronica, infatti, è dovuto principalmente a questo dispositivo, senza il quale l'intero sistema di controllo costerebbe pochi euro. Il sensore di elongazione in particolare, dovendo seguire le asperità del terreno così come la sospensione cui è connesso, deve essere scelto tra quelli espressamente progettati per applicazioni automotive, ovvero tra quelli più costosi..
Il sistema, pensato per lavorare su motoveicoli di fascia medio-bassa, a causa del costo del sensore, avrebbe un costo complessivo quantificabile in un 5% del prezzo finale di commercializzazione del mezzo, mentre una soluzione che possa fare a meno del sensore, avrebbe un'incidenza, in termini di costo, di oltre
un ordine di grandezza inferiore.
È sorta, perciò, l'esigenza di indagare delle soluzioni alternative a quella proposta, pur partendo dalla stessa configurazione hardware.
3.3 Fattibilità regolazione sensorless
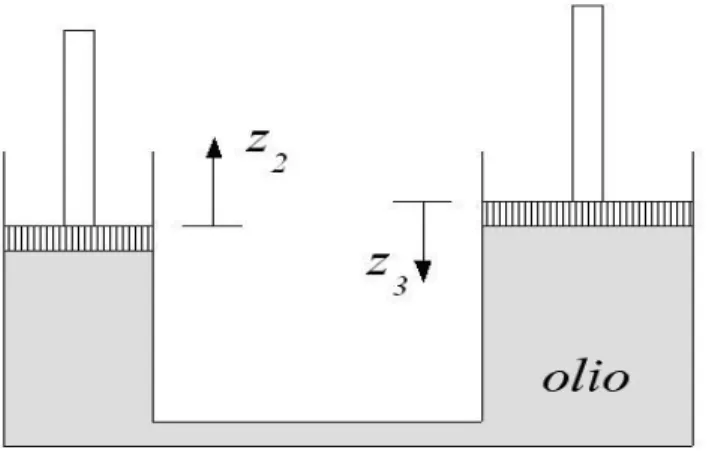
Per investigare strade alternative al sistema con sensore, è stato necessario uno studio del sistema più dettagliato. In Fig. 3.6 è riportata una rappresentazione schematica del sistema.
Fig. 3.6 – Rappresentazione schematica del sistema.
Con i riferimenti di figura, si supponga inizialmente di escludere l'effetto della pressa idrostatica, per cui z2 e z3 si possono considerare rigidamente vincolati
reciprocamente.
Il sistema può essere descritto per mezzo di equazioni caratteristiche e equazioni costitutive degli elementi di interazione del sistema (per notazioni e
definizioni si faccia riferimento alle successive appendici). La vite, di cui il sistema è dotato, è di tipo irreversibile.
Il legame fra coppia applicata Tu alla vite stessa e forza assiale FA , è dato,
nel caso di sollevamento del carico, da:
Tu=FA⋅r⋅tan (3.9)
La (3.9) è l'equazione costitutiva della vite nel caso di sollevamento del carico, nel caso di abbassamento diviene:
Tu=FA⋅r⋅tan− (3.10)
In entrambe le equazioni (3.9) e (3.10), con si è indicato l'angolo dell'elica del filetto, r è il raggio medio della vite e è l'angolo di attrito. Occorre ricordare che , in base alla caratteristica di irreversibilità della vite.
Per il motore in corrente continua valgono le equazioni (appendice C):
T t =J⋅d t dt b⋅t Tut (3.11) V =R⋅iatL⋅diat dt eat (3.12) inoltre: T t =K⋅iat (3.13) eat =K⋅t (3.14)
M⋅d 2z 1t dt2 c⋅ dz1t dt k⋅ z1t−z2t=M⋅g (3.15)
Si suppone il motore a regime, cioè si suppone che nelle sue equazioni (3.11) e (3.12), il contributo legato alle derivate temporali di e di ia , siano
trascurabili rispetto agli altri termini, ipotesi applicabile nel caso di variazioni lente di e ia in cui il motore presenti una risposta più “veloce” della
sospensione.
In base al legame fra moto rotatorio e moto traslatorio nella vite, considerando positivo nel caso di sollevamento del carico, per z2 vale:
z2t=r⋅⋅t⋅tan (3.16)
Nell'equazione (3.15), si divide tutto per M e si sostituisce la (3.16) per z2 :
d2z1t dt2 c M⋅ dz1t dt k M⋅z1t = k M⋅r⋅⋅t⋅tan −g (3.17)
Di questa equazione, si è interessati alla soluzione particolare, cioè la soluzione cosiddetta di regime:
z1pt =r⋅⋅t⋅tan −M⋅g
k −r⋅⋅
c
k⋅tan (3.18)
Si può osservare che la forza assiale della vite FA , è pari alla forza elastica
della molla cambiata di segno:
FA=−k⋅ z1−z2 (3.19)
ottenendo in definitiva:
FA=M⋅gc⋅⋅r⋅tan (3.20)
L'espressione (3.20) trovata per FA , ha validità del tutto generale, in quanto
esprime la forza assiale sia in fase di sollevamento che in fase di abbassamento del carico.
Si supponga per ora il sistema in fase di sollevamento del carico, allora la coppia necessaria a ruotare la vite e sollevare il carico Tu , in base alla (3.9), sarà:
Tu=r⋅tan⋅ M⋅g r⋅⋅c⋅tan (3.21)
Si sostituisce l'espressione trovata per Tu nelle equazioni del motore in
corrente continua a regime e si ottiene:
T =⋅M⋅gb⋅ (3.22)
V =R⋅IaEa (3.23)
dove, per tensione e corrente si è utilizzata la notazione usuale per le grandezze in continua, e si è definito:
≝r⋅tan (3.24)
costante di conversione della vite nel caso di sollevamento del carico, e:
≝r2⋅c⋅tan⋅tan (3.25)
motore in corrente continua.
In virtù di quanto esposto in (3.22) e (3.23), ricordando le relazioni (3.13) e (3.14), è possibile scrivere per la corrente Ia e per la velocità di rotazione :
Ia=b⋅V K⋅⋅M⋅g K 2 R⋅b (3.26) =K⋅V − R⋅⋅M⋅g K 2 R⋅b (3.27)
Le espressioni (3.26) e (3.27), esprimono, a meno di una costante di proporzionalità legata alla presenza della pressa idrostatica, il legame fra il carico
M⋅g e le grandezze del motore in corrente continua, ossia la corrente Ia e la
velocità di rotazione del motore stesso, nella fase di sollevamento del carico. Si consideri ora la situazione di abbassamento del carico, per cui, in base a quanto riportato in (3.10), osservando che , per Tu si ha:
Tu=−r⋅tan−⋅M⋅gr⋅⋅tan (3.28)
Come evidenziato in (3.28) (appendice B), per effetto della vite irreversibile, è necessario ruotare la vite in senso opposto a quello di sollevamento del carico. Adoperando le solite sostituzioni nelle equazioni del motore in corrente continua a regime,si ottiene in definitiva:
Ia=b− ' ⋅V −K⋅'⋅M⋅g K 2 R⋅b− ' (3.29) =K⋅V R⋅ '⋅M⋅g K 2 R⋅b− ' (3.30)
Dove si è definito:
'≝r⋅tan − (3.31)
'≝r2⋅c⋅tan −¿⋅tan (3.32)
Le definizioni (3.31) e (3.32) rappresentano rispettivamente la costante di conversione della vite e il coefficiente di smorzamento dell'ammortizzatore riportato all'albero del motore, nel caso di abbassamento del carico.
Fig. 3.7 – Pressa idrostatica.
I risultati esposti in (3.29) e (3.30), mostrano come anche in fase di abbassamento del carico, le grandezze Ia e dipendano dall'entità del carico.
Ciò si è rivelato in contrasto con quanto misurato sperimentalmente, infatti, come è possibile osservare dai dati sperimentali, di cui si è riportata una sintesi nel successivo capitolo 4, corrente e velocità sono indipendenti dal carico, e quindi da variazioni di esso, nella fase di riduzione del precarico. Tale discrepanza si attribuisce a una delle ipotesi con cui sono state ottenuti i risultati (3.29) e (3.30). Infatti si era ipotizzato inizialmente ininfluente la presenza della pressa idrostatica, supponendo quindi le coordinate z2 e z3 , di Fig. 3.6, reciprocamente
vincolate rigidamente. In realtà, con riferimento a quanto illustrato in Fig. 3.7, a differenza della fase di sollevamento del carico in cui, affinché il sistema
idrostatico possa esser considerato rigido, deve esser verificato che:
[
dz3 dt]
max≥dz2
dt (3.33)
espressione in accordo con l'ipotesi di motore in corrente continua con risposta più veloce rispetto alla sospensione, nel caso di diminuzione del precarico per poter considerare rigido il sistema, è necessario che:
[
dz2 dt]
max≥dz3
dt (3.34)
A meno del caso di uguaglianza, ossia di sistema rigido, la disuguaglianza (3.34) è in evidente contrapposizione con quanto riportato in (3.33) e con l'ipotesi preliminare di motore in condizione di regime, infatti la (3.34) equivale a supporre che la sospensione esaurisca il proprio transitorio più rapidamente del motore in corrente continua.
Il fenomeno può essere inteso meglio con considerazioni sulla risposta in frequenza dei sistemi a singolo polo. In tali sistemi, come noto, la velocità massima di variazione del sistema, è legata alle singolarità del sistema stesso, per cui un sistema con singolarità a frequenza minore rispetto ad un altro, avrà una velocità di variazione massima minore.
Come esposto in appendice A, ogni sospensione è pensata per lavorare da agente filtrante per asperità in un range di frequenze fra 0,25 Hz e 3 Hz, è quindi possibile pensare a singolarità dell'ordine di grandezza di 1 Hz.
Per quanto riguarda il motore in corrente continua invece, dai dati caratteristici del costruttore, ipotizzando un momento di inerzia introdotto dal carico dello stesso ordine di grandezza di quello del motore, in quanto legato ai soli organi rotanti, è possibile trovare singolarità dell'ordine di grandezza di 1 kHz.
Ciò va a suffragio di quanto detto, delle ipotesi fatte in merito alla condizione di funzionamento del motore, e della non interagenza dei poli dei due sistemi in cascata.
È naturale dedurre che, in fase di discesa, per effetto della pressa idrostatica, il motore risulti svincolato dal carico, quindi per e Ia è possibile scrivere:
Ia= b⋅V K 2 b⋅R (3.35) = K⋅V K 2 b⋅R (3.36)
3.4 Principio per la misura del carico
Con il sistema di regolazione dotato di sensore, come già esposto, si effettuava una misura diretta della variazione di lunghezza, associata alla variazione del carico statico (3.8). Da uno studio più dettagliato del sistema stesso, è emerso come sia possibile monitorare direttamente il carico statico, dall'osservazione di due grandezze misurabili sul motore in corrente continua, ossia la sua corrente di armatura Ia (3.26) e la sua velocità di rotazione (3.27).
La misura di corrente di un motore in corrente continua per il monitoraggio del carico di una molla, è l'argomento di un brevetto [10]. Il sistema per il controllo del precarico che utilizzi la misura di corrente è stato sviluppato in lavori precedenti al presente [7].
È utile osservare che se il motore in corrente continua viene attivato per effettuare un numero prefissato di giri, per osservarne la velocità, in particolare la velocità media M , durante l'attivazione, è sufficiente misurarne la durata tatt ,
M=numero di giri
tatt (3.37)
La misura della velocità media consente di ridurre eventuali fluttuazioni connesse alla misura istantanea della velocità.
Il numero di giri effettuati dal motore, è la grandezza monitorata per poter settare il precarico desiderato, infatti, come già illustrato (Fig 3.4), per ognuno degli otto livelli di quantizzazione del precarico, è assegnato un determinato numero di giri del motore.
È chiaro come, fissato il numero di giri su cui effettuare la misura, osservando il tempo di attivazione tatt , sia immediata l'informazione sulla velocità
del motore e conseguentemente sul carico statico della sospensione.
3.5 Analisi critica delle ipotesi semplificative : il sistema reale
Nello studio del sistema fin qui effettuato, non sono stati considerati i fenomeni legati alle non linearità degli elementi del sistema, fenomeni che possono essere tralasciati in una fase di comprensione della fisica del sistema, purché il comportamento complessivo, nell'ipotesi di linearità, non si discosti troppo da quanto accade in realtà.
Prima di poter passare a un approccio sperimentale per un riscontro pratico di quanto esposto, occorre capire quali altri eventi possano interferire nella misura, in modo da cogliere le motivazioni di alcune scelte pratiche e ipotesi, precedentemente formulate, che restringono il campo di validità del modello e di corretto funzionamento del sistema.
In genere le sospensioni sono dotate di ammortizzatori che presentano un coefficiente di smorzamento in compressione minore che in estensione, ciò perché quando la ruota incontra un gradino o un dosso, deve seguire il profilo del manto stradale senza opporre una grande forza, mentre se incontra una cunetta o una
buca può anche saltarla, con momentanea perdita di contatto della ruota dal piano stradale.
Fig. 3.8 – Diagramma forza-corsa di un ammortizzatore.
Tale asimmetria nel coefficiente di smorzamento in estensione e in compressione, introduce una non linearità nel comportamento dell'ammortizzatore (Fig. 3.8) [9]. Il tipo di non linearità esposta migliora le prestazioni dinamiche della sospensione, esistono però altre fonti di non linearità, con effetti nocivi.
Primo, fra tali fenomeni, è la presenza di attrito di strisciamento, anche detto Coulombiano, che tende a bloccare la sospensione finché sottoposta a piccoli carichi.
Un'altra causa di non linearità degli ammortizzatori, risiede nel fluido al loro interno, in quanto il suo moto è laminare in certe zone e turbolento in altre, le due zone cambiano a seconda della velocità v e della posizione x dello stelo. Quindi, mentre nel caso ideale la forza smorzate è data da:
con c costante, nella realtà si ha una relazione del tipo:
FS=−clx ⋅v−ctx ⋅∣v∣⋅v (3.39)
con i due coefficienti cl (laminare) e ct (turbolento), dipendenti da x e dal
segno di v se ha comportamento asimmetrico [13].
Un effetto indesiderato è invece la non linearità della forza elastica introdotta in alcune sospensioni, a causa del contributo dell'aria contenuto nei foderi, in particolare nelle forcelle anteriori, aria che agisce da molla pneumatica posta in parallelo a quella elicoidale [9].
Fig. 3.9 – Ammortizzatore con camera pressurizzata per compensazione variazioni di volume legate allo stelo sospensione.
Un altro fenomeno nell'ammortizzatore, che porta a una variazione di viscosità del fluido, quindi dei coefficienti di smorzamento, introducendo non linearità, è legato alla variazione di volume del liquido stesso per effetto dell'ingresso dello stelo della sospensione (Fig. 3.9) [17].
La temperatura di esercizio è un ulteriore fattore di influenza, infatti l'energia dissipata dallo smorzatore, si trasforma in calore che innalza la temperatura del liquido, con conseguente variazione della sua viscosità e dei coefficienti di smorzamento.
Le non linearità presenti nella sospensione danno luogo a una caratteristica corsa/peso che presenta una sorta di isteresi meccanica,cioè nel senso che a parità di carico esistono più valori della corsa costituenti una situazione di equilibrio, come illustrato in Fig. 3.10.
Per ridurre l'influenza delle non linearità, in particolare dell'attrito staticoo, si è scelto di effettuare le misure con il veicolo in movimento, ossia, come già detto, con velocità nel range fra 20 km/h e 40 km/h, mentre per compensare l'effetto di isteresi meccanica nella misura della corsa, nel sistema di controllo con sensore di elongazione, si introduce nello stato PRELOAD SETTING il settaggio del precarico in funzione non solo della corsa misurata, ma anche del precarico precedente tale misura.
Fig. 3.10 – Caratteristica corsa-peso della sospensione.
La variazione di viscosità per effetto della temperatura, influisce anche sul funzionamento della pressa idrostatica, soggetta a riscaldamento del fluido per effetto dell'attrito viscoso. Un tipico andamento della viscosità di un fluido con la temperatura, è riportato in Fig. 3.11, in cui si evidenzia come per basse temperature, piccole variazioni di temperatura stessa inducano grosse variazioni di viscosità.
Il motore in corrente continua, in particolare il motore in corrente continua a magneti permanenti di cui il sistema è dotato, è soggetto a diversi fenomeni, legati alla temperatura di esercizio e all'attrito, fonte di non linearità.
Fig. 3.11 – Tipico andamento della viscosità dinamica al variare della temperatura T .
Innanzi tutto nel formulare le equazioni del motore in corrente continua, si è supposto la linearità dei coefficienti che appaiono in tali equazioni. Il problema principale risiede nel coefficiente di attrito b che generalmente ha una andamento tutt'altro che lineare. Un tipico andamento del coefficiente b , al variare della velocità di rotazione del motore, è rappresentato dalla curva di Stribeck (Fig. 3.12) [15], divisa in quattro zone di funzionamento:
• zona 1, attrito statico (a velocità nulla);
• zona 2, lubrificazione limite (a velocità quasi nulla);
• zona 3, lubrificazione parziale quasi fluida (forza d'attrito decrescente
con );
• zona 4, lubrificazione totale fluida (forza d'attrito crescente con ).
Il supporre il motore in corrente continua nel funzionamento a regime, consente di considerare il coefficiente di attrito b nella zona 4, oltre che consentire l'utilizzo di equazioni del motore semplificate.
Per effetto della temperatura, si incorre, nel motore a corrente continua, in una variazione della resistenza degli avvolgimenti di armatura R e della costante di accoppiamento elettromeccanico K .
Fig. 3.12 – Curva si Stribeck: coefficiente di attrito b al variare della velocità .
In genere, noto il valore di tali grandezze a una data temperatura T0 , è
possibile determinarne l'entità alla temperatura T di interesse come:
RT =RT0⋅1'⋅T −T0 (3.40)
KT =KT0⋅1−B⋅T −T0 (3.41)
Dove ' e B sono delle costanti di variazione termica dipendenti dal tipo di materiale utilizzato rispettivamente per gli avvolgimenti di armatura e per il magnete permanente [32].
Il magnete permanente del motore, oltre a fenomeni di demagnetizzazione legati alla temperatura, risente di demagnetizzazione per effetto di sovracorrenti [33], causando alterazioni della costante di accoppiamento elettromeccanico