Capitolo 2
La generazione del moto ondoso
2.1. Generalità
Il comportamento fluidodinamico di un kayak è assimilabile al comportamento dello scafo di una nave.
I primi studi teorico-sperimentali sull’architettura navale risalgono a circa cento anni fa, quando il fisico William Froude scompose la resistenza all’avanzamento di un corpo in moto all’interno di un fluido (“floating body”) in 3 contributi di diversa natura3:
- resistenza dovuta agli effetti viscosi (“friction drag” o “viscous resistance”) (RV) - resistenza dovuta alla generazione di onde (“wave making resistance”) (RW) - resistenza dell’aria (“air resistance”) (RA)
Dato che le resistenze sono tutte nella stessa direzione e hanno lo stesso verso, vale la seguente relazione: A W V T R R R R = + + (1-1)
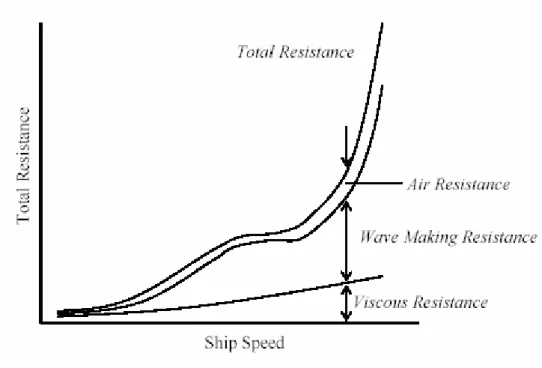
La resistenza all’avanzamento, resistenza totale dello scafo (“total hull resistance”) è la forza che si oppone al moto dell’imbarcazione, supponendo che lo scafo si muova all’interno di acqua calma. Essa dipende dalla velocità, e dalla forma dello scafo (draft, beam, lunghezza, area di superficie bagnata). In Figura 2.1, è mostrato un tipico andamento qualitativo della resistenza totale in funzione della velocità dell’imbarcazione, scomposta nelle diverse componenti che contribuiscono al suo valore complessivo.
Figura 2.1 – Componenti della resistenza al variare della velocità di un’imbarcazione
Si può osservare che, come già accennato in precedenza, la dipendenza della resistenza totale dalla velocità è fortemente non lineare (Figura 2.1). Per le basse velocità, la resistenza aumenta approssimativamente con il quadrato della velocità (RT ∝ V2), mentre a velocità più elevate varia con la quinta potenza (RT ∝ V5).
In Figura 2.1, si osserva inoltre che alle basse velocità la resistenza viscosa è significativa rispetto agli altri contributi mentre al crescere della velocità la resistenza d’onda diviene la principale forma di dissipazione dell’energia.
Ognuna delle tre resistenze cresce con la velocità dell’imbarcazione. La resistenza dell’aria ha un ruolo relativamente modesto sul valore totale della resistenza (meno del 4%); essa può essere normalmente trascurata. Alle basse velocità la resistenza totale è costituita prevalentemente da resistenza viscosa. Alle velocità più elevate è la resistenza d’onda a dominare.
Anche nell’ingegneria navale si identificano numeri adimensionali, impiegando formule per la previsione delle prestazioni di uno scafo, sia teoriche che empiriche. Il più importante è il numero di Froude:
L g V ⋅ = Fr (1-2)
dove V è la velocità in, g l’accelerazione di gravità e L rappresenta la lunghezza dello scafo.
In pratica si può dire che uno scafo procede a basse velocità se il numero di Froude si mantiene al di sotto di 0.12; come già detto, se si verifica una situazione del genere la resistenza totale dello scafo è dovuta quasi completamente alla resistenza viscosa (vedi Figura 2.1).
Nel caso del kayak oggetto dello studio per velocità tipiche delle gare il numero di Froude è pari a: 7 . 0 2 . 5 81 . 9 5 Fr = ⋅ = ⋅ = L g V e 0.56 2 . 5 81 . 9 4 Fr = ⋅ = ⋅ = L g V (1-3) Essendo:
- velocità del kayak in regime stazionario nel range 4÷5 m/s; - lunghezza dello scafo pari a 5.2 metri;
- accelerazione di gravità pari a 9.81 m/s2.
Il numero ottenuto, nel caso in cui la velocità sia pari a 5 m/s (Fn = 0.7), è molto maggiore di 0.12 (circa 6 volte); per cui la resistenza totale è prevalentemente dovuta alla formazione delle onde. Questo risultato è coerente con quanto si osserva nell’attività agonistica degli atleti; le prestazioni massime sono fortemente limitate dalla rapida crescita della resistenza all’avanzamento. In Figura 2.2 è stata indicata, in linea di massima, la zona di lavoro presunta in cui si trova il kayak.
Figura 2.2 – Zona presunta di lavoro del kayak
Il valore ottenuto (0.56÷0.7) che fa rientrare il kayak nella condizione di imbarcazioni ad alta velocità sembrerebbe troppo elevato, dato che la velocità dello stesso è solo di 5 m/s. Occorre fare però una precisazione. La velocità 5 m/s del kayak (corrispondente a circa 18 km/h ossia a 9.7 nodi), è piccola se confrontata con la velocità di altre imbarcazioni. Ma nella formula di Froude, si tiene conto anche della lunghezza dello scafo (che appare al denominatore sotto radice quadrata): il valore piccolo (soli 5.20 metri) di questo permette al numero di Froude di alzarsi notevolmente.
Per esempio, il comportamento del kayak alla velocità di 5 m/s (9.7 nodi) è simile a quello di uno scafo di 17 metri che avanza a 18 nodi. Se si considera che un motoscafo lungo 18-20 metri raggiunge velocità attorno ai 30 nodi, con numero di Froude attorno ad 1.1 e una nave di 135 metri che viaggia a 15 nodi ha un numero di 0.21, il kayak assume un comportamento intermedio fra i due casi.
Considerando la resistenza totale come somma delle resistenze viscose, dell’aria e della generazione di onde, è possibile formulare un’equazione adimensionalòizzando le singole resistenze:
2 2 1 AV R C V V ρ = (1-4) 2 2 1 AV R C W W ρ = (1-5) 2 2 1 AV R C T T ρ = (1-6) dove:
RT = resistenza totale dello scafo in N;
ρ = densità dell’acqua in Kg/m3; V = velocità in m/s;
A = superficie bagnata della parte di scafo immersa nell’acqua misurata in m2.
Sommando i vari coefficienti adimensionali analogamente a quanto visto per le resistenze, si ottiene una relazione del tipo:
W V
T C C
C = + (1-7)
dove:
CT = coefficiente di resistenza totale dello scafo, CV = coefficiente di resistenza viscosa, (1-4),
2.2. Resistenza Viscosa (RV)
La resistenza viscosa (viscous resistance) è la risultante delle forze che agiscono sull’intera superficie dello scafo immersa nell’acqua opposta alla direzione del moto. Nonostante l’acqua abbia un basso valore di viscosità, essa produce una notevole forza di attrito.
La resistenza dovuta all’attrito, cioè dovuta alle azioni di taglio è solo una parte della resistenza viscosa, che è dovuta anche agli effetti di distribuzione della pressione intorno allo scafo.
Il flusso di un fluido si può classificare in due tipi: laminare o turbolento. Il primo tipo di flusso è caratterizzato dal fluido che si muove lungo la pareti dello scafo ordinatamente dando luogo ad un minimo incremento di resistenza; ma all’avanzare del fluido lungo la parete, si arriva ad un punto in cui il flusso laminare si rompe, diventando caotico. Queste sono le condizioni dove si instaura il moto turbolento e la zona prende il nome di “punto di transizione”.
Il moto turbolento è caratterizzato dallo sviluppo di uno spessore di acqua lungo lo scafo che si muove alla velocità dell’imbarcazione (“boundary layer”); le particelle vicine si muovono con questa velocità mentre allontanandosi dallo scafo, la velocità di esse diminuisce. Il boundary layer ha formazione proprio nel punto di transizione e il suo spessore aumenta lungo lo scafo, così come il flusso diventa sempre più turbolento.
Il parametro adimensionale che caratterizza il campo di moto e che è preso a riferimento per stabilire se il flusso è laminare o turbolento è il numero di Reynolds:
µ ρ⋅L⋅V =
Re (1-8)
dove: L = lunghezza dello scafo [m], V = velocità [m/s],
µ = viscosità [kg/m·s].
Approssimativamente per flussi esterni, la transizione fra moto turbolento e moto laminare si ha quando il numero di Reynolds assume i seguenti valori:
5
10 5
Re< ⋅ Flusso laminare Re>1⋅106 Flusso turbolento
Il kayak in studio ha un numero di Reynolds pari a:
6 10 8 . 25 Re= ⋅ ⋅ = ⋅ µ ρ L V e Re= ⋅ ⋅ =20.4⋅106 µ ρ L V (1-9)
rispettivamente per velocità di 5 e 4 m/s, quindi esso è compreso nel range (20÷26·106) Essendo, per l’acqua, la densità pari a 1000 kg/m3 e la viscosità 0.1·10-3 kg/m·s, quindi lo scafo genera moto fluido in regime turbolento.
2.2.1. Coefficiente di resistenza viscosa
Il coefficiente di resistenza viscosa rappresenta è funzione delle proprietà geometriche (forma dello scafo, velocità) e può essere rappresentato dalla seguente relazione:
n t
v C k C
C = + ⋅ (1-10)
dove Ct = componente tangenziale della resistenza, dovuta all’attrito, Cn = componente normale della resistenza, dovuta alla pressione,
k = fattore di forma che tiene conto del peso della forma dello scafo nella resistenza viscosa.
Per quanto riguarda la componente normale della resistenza viscosa (viscous pressure drag), si possono fare alcune considerazioni in riferimento alla successiva Figura 2.3
Figura 2.3 – Corpo investito da un fluido con moto parallelo
Il flusso attorno ad un corpo, genera un campo di pressioni con componenti tangenziali e componenti normali. Nella parte anteriore, si ha una componente di pressione che si oppone al moto, mentre nella parte posteriore la componente è in direzione del moto e quindi lo facilita.
Considerando un fluido ideale (non viscoso), la risultante delle pressioni nella zona anteriore e in quella posteriore risulterebbe uguale, e di conseguenza sarebbe nulla la componente di pressione sulla resistenza.
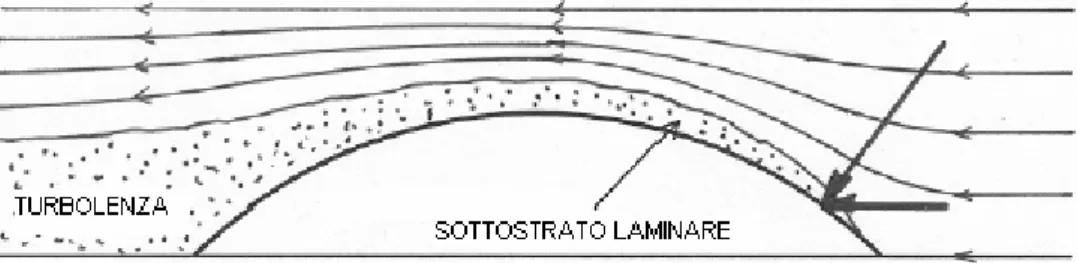
In realtà la situazione è non simmetrica: infatti, come abbiamo visto, da un certo punto in poi (punto di transizione) il moto diventa turbolento, con la creazione di un sottostrato laminare e di vortici che modificano la condizione di simmetria descritta in Figura 2.3. Si può ben vedere questo “salto” osservando la Figura 2.4
Mentre nella parte anteriore la situazione di pressione normale alla superficie resta la stessa, in quella posteriore la presenza del sottostrato laminare e di vortici di turbolenza provoca una diminuzione della componente di pressione normale alla superficie.
Quindi, sotto queste condizioni, le due risultanti non saranno più equilibrate e, predominando quella sull’anteriore, nascerà un forza agente sullo scafo, chiamata appunto “form drag” o “viscous pressure drag”.
2.3. Wave Making Resistance
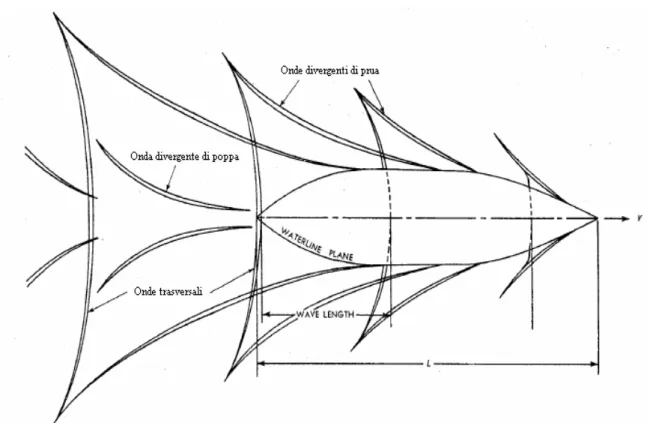
Quando un’imbarcazione si muove nell’acqua genera onde, che vengono prodotte sia sulla prua che sulla poppa e si propagano a partire dallo scafo. Le onde che vengono generate possono essere suddivise in due tipi: si parla di sistemi di onde divergenti e di onde trasversali, come si può vedere in Figura 2.5.
Il sistema di onde trasversali è quello che fra i due assume particolare importanza nei confronti della wave making resistance. L’onda trasversale procede approssimativamente alla stessa velocità dell’imbarcazione; inoltre a basse velocità queste onde hanno una lunghezza ridotta e di conseguenza si possono vedere diverse creste lungo lo scafo. All’aumentare della velocità dello scafo, la lunghezza dell’onda trasversale aumenta, fino ad una valore pari alla lunghezza dello stesso scafo: è proprio in queste condizioni la resistenza dovuta alla generazione di onde predomina.
Le onde divergenti invece sono quelle che vengono generate dalla prua (“bow waves”) e dalla poppa (“stern waves”).
La creazione di onde, richiede energia. Con la velocità, le onde crescono in altezza e ciò richiede di conseguenza una maggior spesa di energia. Questa energia per creare le onde viene considerata persa, poiché è irrecuperabile ai fini della propulsione. Data la dipendenza con la velocità, questo fenomeno è il fattore limitante della velocità massima di una imbarcazione.
Come già detto, un’imbarcazione genera onde in prua e in poppa; inoltre all’aumentare della velocità si assiste ad un aumento sia dell’altezza delle stesse che della loro lunghezza.
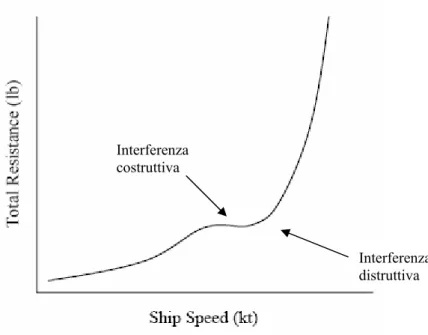
Ad una certa velocità le creste e le depressioni prodotte dalle onde di prua e di poppa possono interagire dando luogo ad un incremento di altezza delle onde stesse e quindi ad un incremento di resistenza. E’ possibile vedere questo fenomeno anche in Figura 2.2, rappresentato dalla caratteristica “gobba” nella curva di resistenza.
Incrementando ulteriormente la velocità, si assiste ad una sorta di interferenza “distruttiva” fra le onde di prua e di poppa. Come conseguenza le onde risultanti hanno basse altezze e ciò si traduce in una diminuzione della resistenza. L’interazione fra le onde di prua e di poppa giustifica la complessa forma della curva di resistenza. Se le onde sono tra loro in fase, le creste si sommano e viene creato un sistema di onde divergenti di elevata altezza. Al contrario, se sono sfasate, le creste delle une si sommano alle valli delle altre e il sistema di onde divergenti risulta essere molto meno energetico (vedi Figura 2.6).
Figura 2.6 – Andamento della resistenza totale in funzione della velocità
La teoria delle onde afferma che l’energia posseduta da un’onda è direttamente proporzionale al quadrato della sua altezza; quindi se l’altezza di un’onda raddoppia, l’energia richiesta diventa quattro volte maggiore. Cioè se la velocità dello scafo aumenta si arriverà ad un punto tale per cui la wave making resistance diventa dominante.
Test sperimentali hanno mostrato che quando la lunghezza dell’onda di prua supera la lunghezza dello scafo, la wave making resistance inizia a crescere rapidamente.
La lunghezza di un’onda libera sulla superficie è legata alla velocità dalla seguente relazione (1-11): g V Lw 2 2π = (1-11)
dove: Lw = lunghezza dell’onda in metri V = velocità dello scafo in m/s
Interferenza costruttiva
Interferenza distruttiva
Utilizzando la stessa equazione (1-11) e sostituendo alla lunghezza d’onda quella dello scafo si può risalire alla velocità alla quale la lunghezza dell’onda trasversale di prua è approssimativamente quella dello scafo:
s s L g V = ⋅ π 2 (1-12)
Vs prende il nome di Hull Speed.
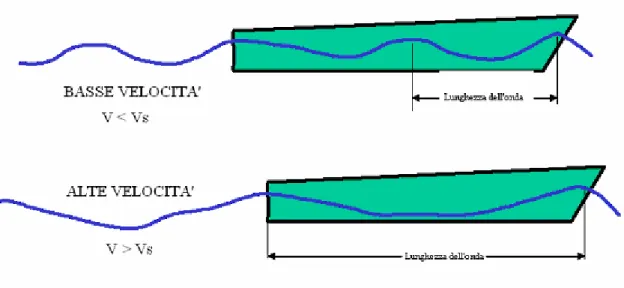
E’ possibile farsi un’idea dei risultati ottenuti osservando la seguente Figura 2.7, dove vengono schematizzati i fenomeni ondosi alle basse e alle alte velocità. Analogamente al numero di Froude, anche qui è possibile fare una distinzione fra alte e basse velocità, che si verificano rispettivamente se V < Vs o V > Vs.
Figura 2.7 – Differenza nella lunghezza dell’onda al variare della “Hull Speed”
Da Vs in poi la wave making resistance comincia a crescere rapidamente. Il valore chiaramente è sperimentale, può accadere anche che la resistenza inizi a crescere molto rapidamente anche per velocità più basse.
Inserendo i dati del problema nelle equazioni (1-11) e (1-12) si ottengono i seguenti valori:
16 2 2 = = g V Lw π metri (1-13) 85 . 2 2 ⋅ = = s s L g V π m/s (1-14)
Dal valore di Lw risulta che, quando il kayak procede alla velocità di 5 m/s, viene generata un’onda di prua lunga circa 10 metri, un valore molto più alto della sua lunghezza dello scafo (circa il doppio). Quindi si presuppone che l’increspatura maggiore sullo scafo sia dovuta alla prima onda di prua (“first bow crest”) e che si estenda per un lunghezza circa 2 volte lo scafo.
La relazione (1-14) indica invece il valore della hull velocity, ossia la velocità dello scafo oltre la quale i fenomeni di wave making resistance dominano sempre di più nella resistenza globale. Essendo V = 4÷5 m/s, si nota come V > Vs, e quindi il kayak si trova nel campo delle alte velocità, dove la resistenza totale è dominata dai fenomeni di wave making.
Si può riportare a questo punto l’esempio della nave classe FFG-7, descritto nel capitolo introduttivo, nel quale era richiesta una potenza doppia (da 20500 HP a 41000 HP) per innalzare la velocità di crociera di soli 4 nodi, da 25 a 29. La nave ha una lunghezza della linea di galleggiamento (“waterline length”) pari a 408 ft e applicando l’equazione precedente si nota che essa uguaglia la lunghezza dell’onda trasversale alla velocità di circa 27 nodi. Questo risultato conferma il ragionamento fatto finora: la velocità di 27 nodi è proprio la hull speed (Vs) della nave, oltre la quale la resistenza dovuta ai fenomeni di wave making è sempre più dominante. Si può osservare che 25 < 27 nodi mentre 29 > 27 nodi.
In effetti, per innalzare di soli 4 nodi la velocità di crociera, è necessaria una potenza doppia. In corrispondenza di Vs, nel grafico di Figura 2.1, la curva di resistenza dovuta al wave making subisce una notevole impennata; pertanto risulta non conveniente energeticamente navigare in condizioni di velocità maggiori della hull speed.