1
Indice
INDICE 1
SOMMARIO 4
1
INTRODUZIONE ALLE RETI COMPLESSE 61.1 Premessa 6
1.2 Reti complesse: overview storico 8
1.3 Definizioni e indici 12 1.3.1 Glossario 13 1.3.2 Indici 14 1.3.2.1 Distanza media 15 1.3.2.2 Coefficiente di clustering 16 1.3.2.3 Degree Distribution 17 1.3.2.3 Connettività 18 1.4 Matrici caratteristiche 19 1.5 Topologie 21
2
SINCRONIZZAZIONE DI RETI COMPLESSE 282.1 Il concetto di sincronizzazione 28
2.2 Modello generale di rete 33
2.1.2 Proprietà geometriche della Laplaciana e esistenza dell’iperpiano di sincronizzazione 36
2.3 Analisi di stabilità dello stato sincrono 36
2.4 L’approccio Master Stability Function 40
3
CONTROLLO DI RETI COMPLESSE 443.1 PINNING CONTROL 44
3.2 Analisi di stabilità locale 45
2
4
IL CIRCUITO DI CHUA 574.1 Il paradosso del caos deterministico 57
4.2 L’oscillatore di Chua 62
4.2.1 Modello fisico 63
4.2.2 Modello matematico 65
4.2.3 Dinamiche e biforcazioni del circuito di Chua 68
5
PINNING CONTROLLABILITY DI UNA RETE DI 8 CIRCUITI DI CHUA 745.1 Sincronizzazione di circuiti di Chua 74
5.2 Controllo pinning di una rete di 8 circuiti di Chua 78
5.2.1 Stima delle regioni di controllabilità per una rete di 8 circuiti di Chua 82
5.2.2 Selezione dei nodi leader 93
5.3 Misure di controllabilità e risultati di simulazione 99
5.4 Prestazioni dell’azione di controllo 113
6
IL SET-UP SPERIMENTALE 1196.1 Logica di base del set-up sperimentale 120
6.2 Controllo USB del set-up sperimentale 123
6.3 Hardware di acquisizione dati: il sistema NI compact DAQ 128
6.4 Realizzazione dei circuiti “nodo” 131
6.4.1 Implementazione del diodo di Chua 132
6.4.2 8 circuiti di Chua identici 137
6.5 Rete di interconnessione controllata via USB 139
6.6 Analisi dei componenti presenti sul circuito di interconnessione 143
6.7 Singolo modulo di link resistivi 147
6.8 UP-DATE del set-up sperimentale finalizzato al controllo 157
6.8.1 Il sistema di riferimento 158
6.8.2 I link di controllo 159
6.8.3 Le resistenze di controllo 161
3
6.9.1 Introduzione al LabView 163
6.9.2 Il Front Panel 167
7
VALIDAZIONE SPERIMENTALE 1707.1 Indice di sincronizzazione completa 171
7.2 Indice di sincronizzazione di fase 172
7.2.1 Il parametro d’ordine di Kuramoto 172
7.2.2 Il segnale analitico per il calcolo della funzione di fase 174
7.3 Risultati sperimentali 178
7.4 Analisi dei dati misurati al variare delle strategie di controllo 191
7.5 Regolazione guidata verso i punti di equilibrio 203
7.5.1 Riferimento costante vC1=0 [V] 204
7.5.2 Riferimento costante vC1=2.34 [V] 207
7.6 Analisi di robustezza 211
7.6.1 Sistemi non identici 211
7.6.2 Segnale di riferimento periodico 215
7.6.3 Controllo di circuiti in regime di funzionamento periodico 218
8
CONCLUSIONI E SVILUPPI FUTURI 224RINGRAZIAMENTI 226
4
Sommario
Il presente lavoro di tesi si pone come obiettivo lo studio delle problematiche legate al controllo di sincronizzazione di reti di circuiti non lineari.
Negli ultimi decenni, le reti complesse hanno spinto la comunità scientifica internazionale verso un costante e continuo lavoro di ricerca che ha portato notevoli risultati nella comprensione di numerosissimi fenomeni naturali, sociali e tecnologici.
Si parte da una prima introduzione al concetto di rete e alla sua capacità di modellare sistemi appartenenti a diversi e variegati campi di studio. Esse infatti sono applicate in ambito sociale, informatico, biologico, in robotica ed in tantissimi altri settori. Passeremo poi a presentare indici caratteristici delle stesse fino a giungere al modello matematico generale che racchiude in sé tutte le informazioni strutturali di un generico sistema complesso. In questo breve overview verranno presentate le più famose ed interessanti topologie che possono essere implementate. Tra le più famose in letteratura, verranno portate all’attenzione del lettore reti random, reti small-world e reticoli regolari.
Sulla base di questi primi concetti fondamentali sarà possibile introdurre gli aspetti legati alla sincronizzazione e al controllo di reti.
Il lettore verrà guidato in una dettagliata analisi degli approcci più famosi riguardanti lo studio delle dinamiche di sincronizzazione, e su come questi possono essere estesi per l’analisi e la sintesi di strategie di controllo non lineari. In particolare si dedicherà grande attenzione ai concetti di controllo pinning e di pinning controllability.
Questi verranno quindi applicati ed una rete di circuiti non lineari caratterizzati da dinamiche d’evoluzione caotiche. Si focalizzerà l’attenzione sul circuito di Chua, forse il primo e più famoso esempio pratico di sistema caotico.
Essendo i sistemi oggetto di studio, caratterizzati da un comportamento aperiodico e impredicibile, verranno introdotti i concetti fondamentali di caos deterministico al fine di comprendere al meglio i sistemi interagenti e le dinamiche di interazione tra gli stessi.
5 Si passerà poi ad analizzare da vicino una realizzazione pratica di un oscillatore di Chua e verrà dedicata grande attenzione su come è possibile realizzare una rete di interconnessione tra i circuiti nodo costituenti il sistema complesso da controllare. Verrà dunque descritto il suddetto sistema da un punto di vista matematico attraverso l’applicazione dei concetti precedentemente menzionati in modo da analizzare e sintetizzare alcune strategie di controllo. Queste verranno dapprima validate attraverso simulazioni numeriche al calcolatore ed in fine applicate al set-up sperimentale allestito presso il laboratorio di Circuiti elettrici del dipartimento di
Ingegneria Elettrica dell’università Federico II.
Sui dati acquisiti sperimentalmente saranno infine testati alcuni innovativi indici di sincronizzazione che hanno permesso di discriminare i fenomeni di sincronizzazione
completa e sincronizzazione di fase.
6
1
I
ntroduzione alle reti complesse
1.1 Premessa
La teoria dei sistemi complessi è un settore di ricerca interdisciplinare in grande espansione negli ultimi anni, e di straordinario interesse sia per la comprensione del mondo in cui viviamo che per le possibili ricadute applicative.
Da un punto di vista concettuale lo studio dei sistemi complessi ha causato una vera e propria rivoluzione nel nostro modo di pensare. Infatti per decenni, gli studiosi hanno preferito un approccio riduzionistico, che consiste nell’affrontare un qualunque sistema, o problema fisico, scomponendolo in una serie di parti, di elementi semplici. Il metodo riduzionistico è la chiave pass-partout per aprire il forziere delle meraviglie della natura: l’idea sui cui si basa tale metodo è che qualunque sistema all’apparenza complicato può essere compreso una volta che viene scomposto nei suoi costituenti elementari. La complessità di ogni sistema va dunque solo ricercata nella complessità dei suoi costituenti. Il paradigma riduzionistico, che è stato alla base delle più grandi scoperte scientifiche dell’800 e del 900, ha iniziato a vacillare negli ultimi 30 anni ed ora ha visto definitivamente sanciti i suoi limiti con la nascita di un vasto movimento di interessi e ricerche su problemi multidisciplinari e con la rivalsa di una nuova scienza: la scienza dei sistemi complessi.
Molte sono state le definizioni di complessità legate allo studio di sistemi dinamici, ma tutte convergono su un punto chiave fondamentale: complesso non è sinonimo di
complicato. Nei sistemi complessi, le singole parti che li compongono sono semplici,
ma interagendo tra di loro danno luogo ad un comportamento molto più complesso. Inoltre le unità elementari costituenti un sistema complesso non sono organizzate dall’esterno, ma si auto-organizzano.
7 Riportiamo di seguito una breve, ma a mio modo esauriente risposta del Professore Leon Chua ad una domanda relativa ad un intervista del Settembre 2007 [17]:
Giornalista: “Nella sua ultima lezione tenuta all’Accademia delle Scienze
Ungheresi, Lei ha definito la complessità in modo nuovo. Vuole dirci qualcosa a riguardo?”
Professore L. Chua: “ Complessità è una parola che viene usata male sia dalla
gente comune sia dai ricercatori. La gente non capisce, e ogni cosa che sembra interessante, viene da loro definita complessità. Nella mia lezione tenuta all’Accademia delle Scienze in Ungheria, ho dato una definizione tecnica e scientifica di complessità. Ho sviluppato una definizione scientifica, e questa definizione è molto semplice. Si parla di complessità quando si ha una collezione di oggetti tutti identici, come per esempio 10000 circuiti di Chua, tutti uguali. Quando li si guarda nella loro totalità, sono tutti omogenei, perché ognuno di essi è uguale all’altro. Ma se solo uno ha qualche proprietà speciale, quella io la chiamo local
activity. Questa è la mia teoria, una nuova teoria, una teoria molto matematica, ed è
chiamata local activity, laddove si può scrivere una equazione e sviluppare una teoria. Tale teoria dice che se si modifica uno dei parametri del sistema, allora l’unità è localmente attiva. Se sono presenti 1000 bicchieri su un tavolo, essi saranno sempre 1000 e, se non sono localmente attivi, il comportamento non subisce alcuna modifica. Ma il circuito di Chua è localmente attivo e, se ne mettiamo insieme alcuni, tutti identici, e lasciamo che interagiscano tra loro, questa combinazione genererà immediatamente dei pattern interessanti di comportamento, che saranno diversi, anche se tutti i circuiti sono gli stessi, ma si otterranno dei pattern completamente diversi. Questa è la complessità. Si possono produrre dei pattern da una collezione di cellule identiche, unità identiche, in questo caso l’unità è il circuito di Chua. Questa è la definizione corretta di complessità, e è scientifica perché io ho una spiegazione matematica, ho una teoria matematica, e anche un metodo per analizzare i parametri. Posso quindi dire precisamente il loro giusto
8
valore. Questo comportamento interessante si può definire complessità. Quindi
complessità semplicemente significa un comportamento non uniforme, da una collezione di unità uniformi. Quando due oggetti si comportano allo stesso modo
non c’è complessità.”
Le principali caratteristiche di un sistema complesso sono:
la presenza di numerosi elementi fortemente interdipendenti che interagiscono in maniera non lineare;
la comparsa a livello globale di proprietà cosiddette emergenti, come la capacità di auto-organizzazione, proprietà che non si possono spiegare a partire dagli elementi costituenti il sistema.
1.2 Reti complesse: overview storico
Quando parliamo di sistemi complessi abbiamo naturalmente in mente i sistemi complessi per eccellenza cioè i sistemi biologici, ed in particolar modo quei sistemi che hanno a che fare con gli esseri umani: il nostro corpo, la società in cui viviamo, le nostre culture.
Un sistema complesso va studiato nella sua integrità perché non può essere considerato una semplice somma delle parti che lo costituiscono.
Come si può facilmente intuire, gli esempi di sistemi complessi sono numerosissimi [1]:
Internet è una rete di router e di domini; Il World Wide Web è una rete di siti web; Il cervello è una rete di neuroni;
Una qualsiasi organizzazione è una rete di persone;
L’economia globale è una rete di economie nazionali che sono a loro volta reti di mercati, a loro volta reti di interazioni tra produttori e consumatori;
9 Le malattie, dall’influenza all’AIDS, sono trasmesse attraverso reti sociali; Gli ormai temutissimi virus informatici si diffondono grazie alla rete internet. Il concetto di rete ha affascinato studiosi di tutto il mondo in quanto ha aperto le porte ad innumerevoli scoperte ed applicazioni.
Lo studio delle reti venne formalizzato matematicamente nelle teoria dei grafi, ed il primo esempio storico di applicazione risale al 1735 ad opera di Eulero. Egli infatti risolse il problema dei ponti di Königsberg fornendo la prima prova matematica nella teoria delle reti.
Tra i primi ad utilizzare la rete come strumento di modellazione e di analisi sono stati i sociologi. In particolare di grande interesse già negli anni trenta del '900 era la possibilità di ricostruire le relazioni, ad esempio di conoscenza, tra gli individui di una stessa società. Questo ha permesso di documentare come gli individui stabilivano le loro relazioni di amicizia o di lavoro. Un'altra applicazione legata contemporaneamente alla sociologia e alla medicina è stata, ad esempio, la rete che descriveva i rapporti sessuali negli Stati Uniti, utile per lo studio della diffusione di malattie come l'HIV.
A titolo esemplificativo in Figura 1-1 si riportano tre reti, risultato di studi in diversi campi.
In automatica, nello specifico, per reti si intende un’interconnessione tramite un opportuno protocollo di singoli sistemi dinamici. I percorsi caratterizzati dagli archi sono infatti veri e proprio anelli di retroazione che, come ben sappiamo, determinano particolari comportamenti e proprietà.
10
Figura 1-1: (a) livello Autonomous System della rete Internet; (b) Rete di contatti sessuali per lo studio dell'HIV; (c) modello di rete Preda-Predatore
In [2] viene dato ampio spazio alla descrizione delle reti complesse.
Un generico sistema complesso si può descrivere come una rete, un network, o in termini matematici come un grafo. Un grafo è un’entità costituita sostanzialmente da vertici ed archi. I nodi rappresentano gli elementi costituenti della rete, mentre gli
archi connettono coppie di nodi e rappresentano le relazioni di interconnessione tra
11
Figura 1-2: semplice esempio di rete
La definizione appena data non è rigorosa, ma piuttosto descrittiva. In seguito verrà utilizzato un formalismo più adeguato, per ora si vogliono mettere in evidenza, ed in maniera semplice, le principali caratteristiche che contraddistinguono una rete.
Per capire l’importanza e la delicatezza di tali sistemi basti pensare che, il 10 Agosto 1996, un guasto su una linea di erogazione energetica in Oregon (USA) portò, attraverso una serie di guasti consecutivi, a blackouts in 11 stati Americani e in due provincie Canadesi lasciando più di 11 milioni di persone senza energia elettrica per più di 18 ore.
Chiediamoci: perché l’anatomia di una rete è così importante?
La risposta a questo breve, ma rilevante quesito è semplice, ma al contempo di fondamentale importanza.
La struttura di una rete influenza sempre il suo comportamento e la sua funzione. Per esempio, la topologia e il layout delle reti di distribuzione di energia (power grids) influenzano in modo sostanziale la robustezza e la stabilità della trasmissione di energia. Pertanto, le reti di sistemi dinamici interagenti sono relativamente complesse da analizzare, in particolare per i seguenti aspetti caratteristici:
12 Complessità strutturale: la topologia della rete può essere caratterizzata da
una notevole numero di collegamenti;
L’evoluzione della rete: il diagramma di collegamento tra i nodi può cambiare dinamicamente;
Diversità di connessione: i link che caratterizzano la topologia possono avere pesi differenti;
Complessità dinamica: i nodi costituenti le entità elementari del sistema complesso possono essere caratterizzati da dinamiche fortemente non-lineari; Nodi interagenti diversi: potrebbero coesistere nel medesimo sistema
complesso nodi caratterizzati da evoluzioni dinamiche diverse;
Meta-complicazioni: le suddette caratteristiche possono combinarsi l’un l’altra influenzandosi a vicenda.
Le reti sono dunque uno strumento che permette di descrivere e modellare una gran quantità di fenomeni. In tutti esistono numerosissimi elementi che interagiscono tra loro permettendo l’emergere di una serie di proprietà altrimenti non esprimibili da un singolo agente. Nella modellazione del fenomeno i nodi rappresentano, appunto, i singoli agenti e gli archi la relazione di interconnessione che esiste tra essi. Naturalmente, come specificheremo in seguito, esistono molti tipi di reti, adatte a formalizzare diversi problemi, ivi compresi quelli in cui esistono più di un tipo di agente e/o più di un tipo di relazione.
Quanto detto ci aiuta a comprendere quella che è stata la naturale evoluzione dello studio delle reti supportata da una sempre crescente potenza di calcolo dei moderni sistemi di elaborazione. Attualmente infatti reti di milioni o miliardi di nodi vengono descritte ed analizzate attraverso una serie di indicatori statistici che costituiscono quella che un tempo era un’analisi basata in gran parte solo su di una lettura visiva del grafo che, ovviamente, non poteva che essere di piccole dimensioni.
1.3 Definizioni e indici
In questo paragrafo si andranno a chiarire alcuni concetti chiave utili per la modellistica e l’analisi delle reti complesse.
13 1.3.1 Glossario
Descriviamo alcuni concetti tipicamente utilizzati per descrivere attraverso un rigoroso formalismo matematico una rete complessa.
Nodo (o vertice): è l’elemento principale della rete, l’unita elementare costituente il sistema complesso, di cui ne rappresenta il soggetto interagente. Arco: è l’elemento di interconnessione tra due nodi e determina, quindi, la
topologia della rete. Esso può essere bidirezionale (o non orientato) quando esiste una mutua e simmetrica interazione tra i nodi, o monodirezionale (o
orientato) quando viene specificato il verso dell’interazione. In quest’ultimo
caso l’arco viene rappresentato tramite una freccia che indica, seguendone il verso, il nodo legato e il nodo legante.
Generalmente il numero di archi costituenti il layout della rete viene indicato con m.
Grado: è un parametro caratteristico del nodo, e indica il numero di archi connessi ad esso. Tale definizione si particolarizza in caso di reti orientate, in cui si parla più propriamente di grado di ingresso (in-degree) e grado
d’uscita (out-degree).
Nel seguito il grado di un nodo i sarà indicato con la lettera ki.
Componente di un nodo è l’insieme dei nodi raggiungibili a partire da esso muovendosi lungo gli archi del grafo. Per definizione il componente di un
nodo contiene il nodo stesso. Nel caso di grafi orientati, si parla di
in-component e di out-component relativo al nodo. Essi sono rispettivamente
l’insieme dei nodi dai quali si può raggiungere il nodo in questione e l’insieme dei nodi raggiungibili dal nodo in questione.
Percorso geodesico (o shortest path): è il percorso minimo tra due nodi, inteso come numero degli archi nel caso non pesato e, per la maggior parte degli autori, come somma dei pesi degli archi nel caso pesato. Nel seguito
14 indicheremo la lunghezza del percorso geodesico tr un nodo i e un nodo j con
.
Quando non esiste nessun cammino che dal nodo di partenza permetta di raggiungere il nodo scelto come destinazione, la distanza tra i due nodi è assunta infinita.
Diametro: è la massima distanza geodesica della rete, considerando tutte le possibili coppie di vertici.
(1.1)
Figura 1-1: Esempio di rete pesata (peso assunto unitario dove non specificato)
Avendo introdotto queste definizioni fondamentali, è ora possibile porre l’attenzione su alcuni indicatori statistici.
1.3.2 Indici
Gli indici che verranno introdotti permettono una rapida e rigorosa classificazione delle diverse topologie di rete.
15 1.3.2.1 Distanza media
È il più semplice parametro che può essere considerato, ed è esprimibile come la lunghezza media dei percorsi geodesici della rete.
In [1] viene specificata le seguente definizione:
(1.2)
dove n è il numero totale di nodi della rete, e è la distanza geodesica tra i nodi i e
j.
Nella seguente definizione sono stati considerati anche i self-loop, ovvero i percorsi (di lunghezza nulla) che uniscono ciascun vertice a se stesso.
Praticamente L determina l’effettiva dimensione o “taglia” di una rete, ovvero il grado medio di separazione tra una qualsiasi coppia di nodi.
Questa definizione è valida però solo se il grafo risulta connesso, cioè nel caso in cui non ci siano coppie di vertici non collegate tra di loro (vertici isolati). Una possibile soluzione a tale inconveniente potrebbe essere quella di assegnare a tali percorsi una distanza infinita (esprimendo così la condizione di non raggiungibilità dei nodi isolati), ma così procedendo il valore di L risulterebbe infinito. Per ovviare a questo ulteriore inconveniente si può definire una media armonica delle distanze minime tra tutte le coppie di vertici, ovvero:
(1.3)
In questo modo i valori infiniti di non contribuiranno alla sommatoria. Una scoperta interessante fu quella che la distanza media di molte reti complesse è relativamente piccola, anche in quei casi in cui queste reti hanno un numero di archi molto minore rispetto a reti globalmente accoppiate (note anche come grafi
completi), con eguale numero di nodi. Questa osservazione ha dato il via allo studio e
16 di reti small world quando la distanza tra una qualsiasi coppia di nodi in media è bassa rispetto al numero di nodi stesso.
1.3.2.2 Coefficiente di clustering
In [1] viene riportato un semplice esempio che ci permette di chiarire il concetto di
clustering. Consideriamo la nostra rete personale di amicizie: è molto probabile che
un amico di un nostro amico sia anche un nostro amico diretto; oppure due dei nostri amici sono probabilmente anche amici tra loro.
Questa proprietà, illustrata in questo semplice esempio si riferisce a quello che in letteratura viene definito clustering della rete. Più precisamente, si definisce
coefficiente di Clustering C, la frazione delle coppie di vicini di un nodo che sono
esse stesse vicine tra loro. Si suppone che un nodo i della rete abbia archi che lo collegano con altri nodi: questi nodi sono i vicini del nodo i (si noti che l’insieme dei vicini del nodo i non include lo stesso nodo i).
È chiaro che al massimo archi possono esistere tra loro e ciò si verifica quando ogni vicino del nodo i è connesso ad ogni altro vicino di i. Il coefficiente di
clustering è definito quindi come il rapporto tra il numero di archi che realmente esistono fra questi nodi e il numero totale dei possibili collegamenti , vale a dire:
(1.4)
Il coefficiente di clustering dell’intera rete è la media dei su tutti i nodi i della rete:
(1.5)
Chiaramente risulta e C=1 se e solo se la rete risulta essere globalmente accoppiata, ogni nodo cioè è connesso con ogni altro nodo.
In una rete con topologia random di n nodi risulta
.
L’introduzione di questo ulteriore indicatore statistico, ha mostrato che molte reti reali di larga scala hanno17 una tendenza a clusterizzarsi, nel senso che il loro coefficiente di clustering è molto più grande di 0, anche se comunque minore di 1: ciò vuol dire che la maggior parte delle reti reali non è random.
1.3.2.3 Degree Distribution
Avendo precedentemente introdotto il concetto di grado relativo ad un singolo nodo, andiamo ora a chiarire uno degli indici statistici più importanti nella classificazione delle reti complesse: la degree distribution (distribuzione di grado). La distribuzione di grado dei nodi della rete è caratterizzata da una funzione di distribuzione P(k) che indica la probabilità che un nodo scelto casualmente abbia esattamente grado k:
(1.6)
Dove N è l’ordine della rete e n(k) è il numero di nodi che effettivamente hanno grado k.
Un reticolo regolare ha una semplice sequenza di gradi perché tutti i nodi della rete hanno lo stesso numero di archi e il plot della distribuzione del grado presenta un unico picco (delta distribution). Nel caso limite opposto a quello dei reticoli regolari, cioè nelle reti random, la successione dei gradi segue la forma della distribuzione di Poisson: cresce fino ad un valore picco in corrispondenza del grado medio <k> e poi decresce esponenzialmente. Proprio a causa di questo andamento, la probabilità P(k) di trovare un nodo con k archi diviene trascurabile per k >> <k>.
Negli ultimi anni, molti risultati empirici hanno mostrato che, per molte reti reali di larga scala, la degree distribution si scosta significativamente dalla distribuzione di Poisson.
In particolare, per un elevato numero di reti, la distribuzione del grado può essere meglio descritta da una legge di potenza: .
Questo particolare tipo di distribuzione decresce molto più rapidamente rispetto ad una di tipo esponenziale, lasciando che pochi nodi abbiano un grado alto e molti abbiano un grado basso.
18
Figura 1-2: esempio di rete esponenziale e di rete scale free.
1.3.2.3 Connettività
La teoria dei grafi, su cui si basa gran parte dell’analisi dei sistemi complessi, è piuttosto ampia, e si focalizza sulle proprietà delle matrici che descrivono i grafi [3], [4]. Poniamo ora l’attenzione sul concetto di connettività, attraverso cui è possibile classificare le reti in connesse e fortemente connesse.
Una rete non diretta è detta connessa quando, scelta una qualsiasi coppia di nodi i e j, esiste un percorso che li collega. Evidentemente, se esiste un percorso che collega i nodi i e j, esiste anche il percorso inverso tra il nodo j e il nodo i.
Una rete diretta è detta fortemente connessa quando per qualsiasi coppia di nodi i e j esiste un cammino orientato che li unisce. A differenza del caso precedente è necessari seguire il verso specificato dagli archi.
19 Si definisce inoltre grafo associato ad una matrice Anxn e si indica con Г(A) il grafo
diretto di n nodi P1,P2,…,Pn per il quale esiste un arco da Pi a Pj se e solo se aij ≠ 0
[4].
Si definisce ciclo di un grafo un percorso che parte da un nodo e termina nel nodo stesso e nel quale il nodo di partenza e destinazione occorra due volte, mentre tutti gli altri nodi attraversati una. Un ciclo di lunghezza unitaria, che sia cioè costituito da un anello che parta e termini nello stesso nodo è detto loop.
1.4 Matrici caratteristiche
Come abbiamo specificato precedentemente, lo studio analitico delle reti complesse viene affrontato sfruttando la teoria matematica dei grafi. Così come abbiamo visto, è possibile associare un grafo ad una matrice, è oltremodo possibile descrivere un grafo attraverso delle matrici.
Presentiamo di seguito tre matrici che risultano essere particolarmente vantaggiose nella descrizione di un grafo. Esse sono tutte di dimensione n x n, dove n è il numero dei nodi.
Matrice di grado. È una matrice diagonale generalmente indicata con D e avente come elemento dii il grado dell’i-esimo nodo.
Matrice di adiacenza. Solitamente indicata con A, è quella matrice in cui il generico termine aij è pari al peso dell’arco diretto che collega il nodo Pi al
nodo Pj. Se tale arco non è presente, il valore corrispondente nella matrice di
adiacenza è nullo.
La matrice di adiacenza, come vedremo più avanti, gioca un ruolo fondamentale nella modellistica di una rete di sistemi dinamici. È dunque doveroso fare alcune bravi, ma importanti osservazioni.
In primo luogo, se la rete è bidirezionale, la matrice di adiacenza è simmetrica, essendo l’arco che collega Pi a Pj analogo all’arco che collega Pj
20 In secondo luogo esistono termini diversi da zero sulla diagonale solo se il grafo contiene al suo interno dei self-loop (archi che partono e terminano dallo stesso nodo).
Come terza ed ultima osservazione si sottolinea, ed è facile notarlo, che l’i-esima riga della matrice di adiacenza rappresenta, nei suoi termini non nulli, gli archi uscenti dal nodo i-esimo. In maniera speculare, l’i-esima colonna rappresenta gli archi entranti nel nodo i-esimo.
Matrice Laplaciana. Tale matrice riveste un ruolo fondamentale nello studio delle reti di sistemi dinamici. Viene solitamente indicata con L e definita come . Essa è caratteristica del modello dinamico che caratterizza l’evoluzione dell’intera rete. Le sue proprietà verranno ampiamente discusse nel seguito, qui ci limitiamo ad affermare che, per com’è definita, è simmetrica se la matrice di adiacenza è simmetrica, dunque se la rete è bidirezionale. Gli autovalori di L sono così ordinati: 0= λ1< λ2<…< λN. Essa
presenta sempre un’autovalore λ1 = 0, mentre il primo autovalore diverso da zero (il più piccolo in modulo) λ2 determina gran parte delle proprietà dinamiche della rete.
A titolo esemplificativo si riportano nel seguito le matrici di grado, di adiacenze e Laplaciana per il grafo di Figura 1-5.
;
21 ;
Figura 1-3: Esempio di grafo
1.5 Topologie
Esistono differenti topologie di reti, e molte possono essere progettate ad hoc. Porremo l’attenzione sulle principali topologie di interesse nell’ambito scientifico e tecnologico.
In [1] viene dato ampio spazio alla classificazione di diverse topologie di reti tra cui ne sono state selezionate alcune:
Rete regolare. È una rete in cui tutti i nodi hanno lo stesso grado [5]. Naturalmente questa caratteristica può coinvolgere diversi tipi di rete.
Reticolo. È una rete con un ordine negli archi ripetitivo. Indipendentemente dal numero dei nodi la rete si mantiene ordinata seguendo sempre la stessa struttura. Esistono tantissime geometrie che possono essere formate, da reticoli a griglia, toroidali o ad anello. Nel corso della tesi si utilizzerà, come
22 reticolo, un reticolo regolare ad anello. In Figura 1-6 è disegnato un reticolo regolare ad anello di venti nodi con grado due (nell'ipotesi di voler considerare gli archi orientati) o
quattro (nell'ipotesi di non voler considerare gli archi orientati).
Figura 1-4: reticolo regolare ad anello con n=20 e m=2
Rete random. È una rete introdotta da Erdös e Rényi [6]. Essa è molto semplice da definire ed è anche stata la rete più a lungo studiata dal punto di vista statistico. Consiste, riferendosi sempre per semplicità alla sua versione bidirezionale, in una rete in cui la presenza o meno di un link tra due nodi ha una probabilità p. É quindi sufficiente solo questo parametro per caratterizzarla, oltre ovviamente ad n.
Per questo tipo di reti è importante evidenziare che il procedimento di costruzione di esse non garantisce che la rete sia fortemente connessa, soprattutto quando n è elevato e p è basso.
Rete small-world. Dalle precedenti definizioni deduciamo che mentre i reticoli regolari sono fortemente clusterizzati, ma non mostrano l’effetto small-world, i grafi random mostrano tendenzialmente il suddetto effetto, ma
23 presentano un basso coefficiente di clustering. Quindi non è sorprendente constatare che sia il modello di reticolo regolare che il modello random ER non sono troppo idonei per riprodurre alcune importanti caratteristiche che si riscontrano in molte reti reali. Dopo tutto, la maggior parte di queste non sono né completamente regolari, né completamente random.
La realtà infatti vuole che di solito le persone conoscano i loro vicini di casa, ma il loro cerchio di conoscenze non può di certo essere confinato a quelli che vivono giusto fuori la porta di casa, come il modello regolare implicherebbe. Allo stesso modo, casi come, ad esempio, i link tra le pagine web sul World Wide Web non sono certamente creati a caso, come ci si potrebbe aspettare dal modello ER.
Con l’obiettivo ambizioso di descrivere la transizione dal reticolo regolare al grafo random, Watts e Strogatz [7] introdussero un interessante modello di rete small-world che in onore dei due autori è stato identificato come modello WS.
Introduciamo brevemente l’algoritmo proposto da Watts e Strogatz.
Algoritmo del modello small-world WS:
I) Start with order: iniziare con una rete regolare di N nodi sistemata ad anello, dove ogni nodo i è adiacente ai suoi nodi vicini i =1,2,...K/2;
II) Randomization: redirezionare casualmente ogni arco della rete con probabilità p; variando p in questo modo può essere osservata la transizione dall’ordine (p = 0) alla casualità (p = 1).
24
Figura 1-5: Passaggio dalle reti regolari alle reti random
(a) In questa rete di amicizie completamente regolare le persone sono amici solo con i 4 vicini più prossimi. La rete è altamente esclusiva e due persone prese a caso sono mediamente più lontane.
(b) In questa rete small-world, le persone conoscono ancora 4 altre persone in media, ma pochi hanno anche amici distanti. La rete è ancora altamente esclusiva ma il grado medio di separazione è più piccolo.
(c) In questa rete random, in media, ognuno conosce ancora 4 persone, ma gli amici sono sparsi: poche persone hanno molti amici in comune.
Redirezionare, all’interno di questo contesto, significa spostare il capo di un arco da
un nodo ad un nuovo nodo scelto a caso dall’intera rete, con le limitazioni che:
1. due diversi nodi non possono avere più di una connessione tra di loro; 2. nessun nodo deve avere una connessione con se stesso.
Questo processo introduce pnK/2 archi di lungo raggio che connettono nodi che altrimenti sarebbero in parti molto lontani nella rete. Nel modello small-world WS, entrambi i comportamenti del coefficiente di clustering C(p) e dell’ average path length L(p) possono essere considerati come una funzione della probabilità di redirezione p. Un reticolo regolare ad anello (p = 0) è altamente clusterizzato
25 (C(0) ≈ 3/4 ) ma ha un grande average path lenght ( L(0) ≈ (N/2K) >> 1). Si è dimostrato che, per piccoli valori della probabilità di redirezione, dove le proprietà locali della rete sono ancora molto simili a quelle delle reti regolari originali e, dove di conseguenza il coefficiente di clustering non differisce molto dal valore iniziale (
C(p) ~ C(0) ), allora l’average path lenght decresce rapidamente ed è lo stesso delle
reti random ( L(p) >> L(0) ) (Figura 1-8)
Figura 1-6: Average path length e coefficiente di clustering del modello small-world WS in funzione della probabilità di redirezione p
In Figura 1-8 entrambe le curve sono normalizzate rispetto ai valori C(0) e L(0) relativi al reticolo regolare (p = 0), ottenente con un rete N=2000 nodi mediata su 10 simulazioni.
Questo risultato è piuttosto naturale: se da un lato è sufficiente fare poche redirezioni random per ridurre significativamente l’average path length, dall’altro lato molti link rediretti non possono cambiare significativamente la proprietà locale di clustering della rete.
Il modello small-world può anche essere visto come una rete omogenea in cui tutti i nodi hanno approssimativamente lo stesso numero di archi: sotto questo aspetto il
26 modello di rete small-world WS è simile al modello di rete random ER. Il lavoro sulle reti small-world WS ha scaturito una valanga di ricerche su nuovi modelli di rete, tra cui anche qualche variante del modello di Watts e Strogatz. Tra quelle più interessanti c’è quella proposta da Newman e Watts [8], da qualche anno considerato anch’esso come modello small-world NW.
Nel modello NW non si rompono le connessioni tra due nodi vicini ma invece si aggiunge, con probabilità p, un collegamento tra una coppia di nodi. Allo stesso modo, in questo modello non si permette ad un nodo di essere accoppiato con un altro nodo più di una volta o di esserlo con se stesso. Con p = 0 il modello NW si riduce alla rete regolare nearest-neighbor, mentre se p = 1 esso diviene una rete globalmente accoppiata. Il modello NW è un po’ più facile da analizzare rispetto al modello originale WS in quanto esso non conduce alla formazione di cluster isolati, mentre ciò può accadere per il modello WS. Per p sufficientemente piccolo e per N sufficientemente grande, il modello NW è sostanzialmente equivalente al modello WS. Comunque oggi questi due modelli sono comunemente chiamati entrambi modelli small-world.
I modelli small-world pongono le loro radici nelle reti sociali, dove la maggior parte delle persone sono amiche dei loro immediati vicini, ad esempio con i vicini dello stesso condominio o con i colleghi nello stesso ufficio. D’altra parte, molte persone hanno alcuni amici molto lontani, come amici negli altri paesi, che sono rappresentati dagli archi a lungo raggio creati dalla procedura di redirezione nel modello di Watts e Strogatz o dalla procedura di aggiunta di link nel modello di Newman e Watts.
27
Figura 1-7: Modelli small-world. (a) Modello Watts-Strogatz con il redirezionamento dei link. (b) Modello Newmann-Watts con l'aggiunta dei link
Rete scale free. è una rete [9] in cui la distribuzione di grado segue una legge di potenza: con γ > 1 . Questo genere di reti è tipico, tra le altre, delle reti di proteine, del Web, di Internet e delle reti aeroportuali internazionali.
28
2
S
incronizzazione di reti complesse
In questo capitolo viene descritto il problema della sincronizzazione di reti complesse di sistemi dinamici. Partendo dal modello generale di rete, verranno presentate le principali caratteristiche legate all’interazione tra i singoli agenti, che inducono un processo di auto-organizzazione caratteristico dei sistemi in esame. Successivamente sarà introdotto un approccio comunemente noto come Master
Stability Function che specifica le condizioni analitiche da soddisfare affinché i nodi
della rete possano raggiungere uno stato di equilibrio comune.
2.1 Il concetto di sincronizzazione
Il termine “sincrono” è spesso incontrato in ambito scientifico e nel linguaggio comune. La parola deriva dal greco e nella traduzione diretta significa “condividere un tempo comune, accadere nello stesso tempo”. La prima osservazione scientifica del fenomeno risale a Christiaan Huygens [10]. Era il 1673 quando lo scienziato, appendendo ad una trave comune due orologi a pendolo, notò che essi sincronizzavano il loro moto oscillando insieme in fase o in opposizione di fase e che ciò aveva luogo solo se il moto disaccoppiato dei due pendoli non era troppo dissimile e se le fasi iniziali erano prossime. Huygens diede dunque una brillante spiegazione qualitativa dell’effetto di mutua sincronizzazione osservando che la conformità del ritmo dei due orologi era causata da un impercettibile movimento della trave (che svolgeva dunque il ruolo di variabile di accoppiamento). Molti sistemi in natura e nella tecnologia sono composti da un elevato numero di unità dinamiche interconnesse in cui il funzionamento collettivo è completamente
29 differente da quello individuale delle singole unità. Recentemente è stato dedicato un interesse sempre crescente alla sincronizzazione di reti complesse i cui nodi sono oscillatori caotici: essa non solo può spiegare alcuni fenomeni naturali, ma presenta anche diverse applicazioni nel campo della sicurezza delle comunicazioni, dell’image processing, etc.
Tra le innumerevoli applicazioni dello studio di reti complesse di sistemi dinamici ne riportiamo alcune:
Cooperazione di un gruppo di robot;
Ottimizzazione nella distribuzione di energia elettrica;
Analisi e sintesi di cluster di proteine o altri reagenti biologici;
Comprensione di numerosi fenomeni naturali, quali il formarsi di stormi di uccelli;
Previsioni meteorologiche.
Il concetto di sincronizzazione dunque, ha spinto la comunità scientifica internazionale verso un continuo e stimolante lavoro di ricerca, proprio per le considerevoli ricadute applicative.
Studi recenti hanno portato ad una classificazione di questo fenomeno di cui riportiamo brevemente i punti salienti.
In [11] sono state classificate differenti tipologie di sincronizzazione.
Sincronizzazione completa: si intende la perfetta coincidenza delle traiettoria sul piano delle fasi dei sistemi elementari identici costituenti la rete. Considerando una rete costituita da N sistemi identici, la condizione da soddisfare è:
In questo caso si assiste all’automatica soppressione delle differenze d’evoluzione dei sistemi (ed esempio caotici) accoppiati, indipendentemente dal set di condizioni iniziali.
30 Consideriamo ad esempio due sistemi caotici identici accoppiati. L’interazione tre i due (ad esempio di tipo lineare) comporta un reciproco influenzarsi delle due traiettorie che convergono verso uno stato comune. L’interazione reciproca, come vedremo più avanti, tra i due sistemi è proporzionale alla differenza d’evoluzione tra i rispettivi stati (es. x1-x2; y1-y2; z1-z2) e tenda a svanire quando questi coincidono (in accordo con la
precedente definizione analitica).
Quindi in caso di completa coincidenza delle variabili, ogni sistema non percepisce più l’effetto dell’interazione, e prosegue l’evoluzione caotica come se fosse disaccoppiato. Il fenomeno appena descritto è proprio quello che in letteratura è noto come sincronizzazione completa: lo stato dei due
sistemi coincide e varia in maniera caotica nel tempo. Chiaramente, uno stato
completamente sincronizzato esiste per ogni valore della forza d’accoppiamento, ma solo determinati valori di quest’ultima ne assicurano l’asintotica stabilità come mostreremo dettagliatamente nei prossimi paragrafi.
Anticipiamo solo che la soglia di forza di accoppiamento, oltre la quale è garantita la stabilità, è legata alla topologia della rete di interconnessione.
Figura2-1: Esempio di sincronizzazione completa: due oscillatori di Lorenz accoppiati.
Sincronizzazione generalizzata: in questo caso andiamo a considerare sistemi diversi tra loro, caratterizzati cioè da non identiche dinamiche d’evoluzione. Chiaramente in questo caso non avremo mai una perfetta
31 coincidenza delle traiettorie che tuttavia si avvicinano tra loro. In particolare, per valori di forza d’accoppiamento sufficientemente grandi, c’è una relazione funzionale del tipo x2 = F(x1) tra gli stati dei due sistemi. Ciò
comporta che, conoscendo i campi vettoriali F, è possibile determinare univocamente lo stato del secondo sistema se il primo è noto con esattezza. Questa condizione è stata definita sincronizzazione generalizzata [Rulkov 1995]. La sincronizzazione completa precedentemente introdotta, è un caso particolare di sincronizzazione generalizzata che si manifesta in caso di totale equivalenza dei campi vettoriali F caratteristici dei sistemi interagenti. Tipicamente, il fenomeno appena descritto si osserva in sistemi caratterizzati da un accoppiamento unidirezionale, quando cioè il primo sistema (driving), forza il secondo (driven), senza che ci sia un’azione di ritorno. Questa situazione è spesso identificata come master-slave action. In questo caso la sincronizzazione generalizzata può essere interpretata come la soppressione delle dinamiche del sistema slave da parte del sistema master, in modo che lo slave segua passivamente il master.
Sincronizzazione di fase: è un fenomeno interessante nel contesto di reti di oscillatori caotici, di cui si darà un maggiore e dettagliato approfondimento nei prossimi capitoli. In questo caso si osserva che gli oscillatori raggiungono un equilibrio comune per quanto riguarda la fase senza che ci sia una sostanziale correlazione tra le ampiezze. Rimandiamo il lettore al capitolo 7 per una più completa analisi del fenomeno. Presenteremo il calcolo della funzione di fase attraverso un approccio innovativo basato sulla trasformata di Hilbert. Per ora ci limiteremo a dare alcune nozioni introduttive.
Nel contesto di oscillatori caotici accoppiati il concetto di sincronizzazione può essere interpretato come un trasporto di fase caratterizzato dalla seguente relazione:
32 Avendo indicato con e rispettivamente le funzioni di fase dei due oscillatori accoppiati, n e m due numeri interi positivi e δ una costante maggiore di 0. La relazione appena introdotta vale anche nella sua espressione differenziale, vale a dire per le rispettive frequenze dei due oscillatori:
La sincronizzazione di fase in relazione a sistemi di oscillatori caotici accoppiati, è una diretta generalizzazione del fenomeno appena introdotto. In corrispondenza del regime sincrono d’evoluzione, le fasi dei sistemi caotici interagenti risultano essere bloccate (si parla in questo caso di phase-lock), mentre le ampiezze variano caoticamente e risultano praticamente incorrelate. Il metodo comunemente usato nell’analisi digitale dei segnali (DSP) è quello che sfrutta il concetto di segnale analitico di cui discuteremo più avanti nel corso del lavoro (capitolo 7).
Figura 2-2: a) due oscillatori di Rossler accoppiati: evoluzione temporale della prima variabile di stato; b) differenza di fase calcolata via Hilbert; c) forza di accoppiamento di tipo sinusoidale
In Figura 2-2 proponiamo un risultato numerico di simulazione relativo al calcolo della differenza di fase di due oscillatori di Rossler accoppiati con una legge di accoppiamento di tipo sinusoidale. Si noti come in corrispondenza
33 dei massimi della legge di accoppiamento, si verifichi il fenomeno del phase-lock, garantendo il sincronismo tra le frequenze dei due oscillatori.
Nel capitolo 7 vedremo come formalizzare opportunamente i concetti qui introdotti e presenteremo un indice di sincronizzazione per analizzare quantitativamente questo fenomeno.
Bounded synchronization: prevede che l’errore di sincronizzazione, inteso come la distanza delle traiettorie dei singoli agenti dalla traiettoria di sincronizzazione sia confinata all’interno di una fascia di tolleranza, sia cioè asintoticamente limitata. Deve cioè essere soddisfatta la relazione:
È una definizione un po’ più elastica rispetto a quella di sincronizzazione completa, che si riscontra in molti fenomeni naturali.
Sincronizzazione con ritardo: implica che la differenza tra l’uscita di un sistema al tempo t e l’uscita di un altro sistema sfalsata di un tempo τ sia asintoticamente limitata.
2.2 Modello generale di rete
Il modello consiste nella scrittura del sistema dinamico complessivo dell’intera rete attraverso un insieme di equazioni differenziali.
Come vedremo di seguito la scrittura di tali equazioni è caratterizzata da un termine che porta in conto le dinamiche proprietarie dei singoli agenti, e un termine che, sommato al precedente, caratterizza le dinamiche di interazione tra i singoli sistemi nodo costituenti la rete.
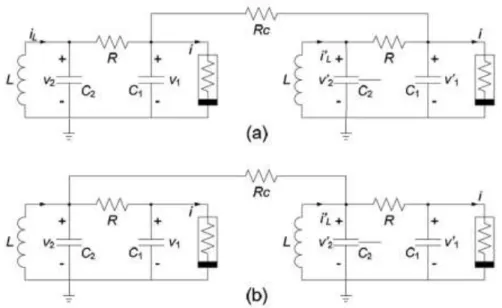
I sistemi oggetto di studio in questo lavoro di tesi sono circuiti elettronici non lineari, quindi per un’esauriente descrizione da un punto di vista matematico bisogna inquadrare questo problema di modellistica nella realtà dei sistemi non lineari.
34 Da un punto di vista delle dinamiche non lineari, si è particolarmente interessati al ruolo che la topologia della rete gioca nel determinare il comportamento dinamico della stessa. Avere dunque una descrizione matematica di come la topologia influenzi la dinamica di evoluzione ha permesso di raggiungere obiettivi considerevoli sfruttando la sempre più crescente potenza di calcolo dei moderni sistemi di elaborazione.
Consideriamo una rete di sistemi dinamici non lineari costituita da N nodi accoppiati
ognuno dei quali caratterizzato da un set di equazioni differenziali non lineari
n-dimensionali del tipo:
con vettore di stato del sistema.
Le equazioni di stato che governano la dinamica dell’intera rete possono essere scritte come:
Dove sono le variabili distato del nodo i-esimo e è il campo vettoriale n-dimensionale che ne governa le dinamiche; la costante c > 0 rappresenta la forza di accoppiamento (coupling strength) della rete; costituisce la funzione vettoriale d’uscita, e Gij sono
gli elementi della matrice simmetrica di connettività G di dimensione N x N con somme lungo le righe nulle ( ) e termini strettamente negativi lungo la diagonale principale ( ). La matrice di connettività G specifica la forza e la
35 topologia della connessione ed è legata, come vedremo a breve, alle classiche matrici caratteristiche di una rete di sistemi dinamici.
Nel seguito del lavoro, per seguire un approccio analitico, faremo l’ipotesi che la rete sia composta da tutti sistemi identici ( ), interconnessi attraverso un protocollo di accoppiamento lineare meglio noto come accoppiamento diffusivo. Per tanto il modello 2.2 può essere riscritto come:
dove Г è una matrice costante che specifica le variabili di stato dei singoli nodi su cui è stato chiuso un feedback-loop.
Per semplicità si assume che Г = diag (r1, r2, … , rn) è una matrice diagonale con ri = 1 per
una particolare i e rj = 0 per j ≠ i.
Ciò implica che due nodi accoppiati sono interconnessi attraverso la rispettive i-esime variabili di stato.
Nel modello 2.3 l’elemento caratterizzante gran parte delle proprietà dinamiche d’evoluzione è la matrice L = (lij) ℜ N x N che descrive matematicamente la configurazione di
accoppiamento (topologia) della rete. Essa è la matrice Laplaciana introdotta nel capitolo 1.
Se è presente una connessione tra il nodo i e il nodo j, allora il generico elemento
lij = -1; altrimenti, lij = 0 (i ≠ j). Gli elementi sulla diagonale principale di L sono
definiti come:
Chiaramente, se il nodo i-esimo ha grado ki, gli elementi sulla diagonale principale
36 2.1.2 Proprietà geometriche della Laplaciana e esistenza dell’iperpiano di
sincronizzazione
Da quanto detto, risulta chiaro che la Laplaciana caratterizza il termine di accoppiamento nel modello e, in caso di grafo non diretto e in assenza di cluster isolati di nodi, risulta essere simmetrica, cioè L = LT.
Per come è stata definita la matrice Laplaciana di un grafo (2.3) (definizione tra l’altro concorde con quanto scritto nel capitolo 1 come L = D - A) è facile osservare come esse sia a somma delle righe nulle. Vale cioè l’espressione:
Questa proprietà è di fondamentale importanza nello studio delle dinamiche di sincronizzazione, poiché caratterizza la lineare dipendenza delle colonne della matrice stessa e quindi det(L) = 0. Per tale motivo la Laplaciana ha almeno un autovalore nullo λ1 = 0 a cui corrisponde l’autovettore associato 1 = (1,1, … ,1)T. L’ipotesi di avere nodi identici, caratterizzati cioè dai medesimi campi vettoriali, le proprietà geometriche della Laplaciana, e una funzione d’accoppiamento identica per ciascun nodo, garantisce l’esistenza di quello che in letteratura viene definita
synchronization manifold S, un insieme invariante per cui a regime avremo:
. Dunque lo studio della stabilità dello stato sincrono si riduce a quello delle proprietà dinamiche del sistema lungo tutte le direzioni dello spazio di stato che risultano essere trasversali rispetto alla synchronization manifold.
2.3 Analisi di stabilità dello stato sincrono
In riferimento al modello 2.3 introduciamo le condizioni necessarie affinché lo stato sincrono sia asintoticamente stabile.
37 La condizione di sincronizzazione prevede che:
x
1(t) = x
2(t) = … = x
N(t), per t → ∞ (2.7)
La condizione di accoppiamento diffusivo (2.4) e le proprietà geometriche della matrice di accoppiamento, garantiscono che lo stato di sincronizzazione sia una soluzione s(t) Є ℜn, di ogni nodo isolato, vale cioè la relazione:
Lo stato s(t) può essere un punto di equilibrio, un’orbita periodica (ad esempio un ciclo limite) o anche un attrattore caotico. Chiaramente, la stabilità dello stato di sincronizzazione,
x
1(t) = x
2(t) = … = x
N(t) = s(t) (2.9)
della rete 2.3 è determinata dalle dinamiche di un nodo isolato, dalla forza di accoppiamento c, dalla matrice di collegamento interna Г e dalla matrice Laplaciana L
che determina la topologia della rete.
Specificate le dinamiche dei singoli nodi (attraverso il campo vettoriale f (x)) e la struttura interna di interconnessione, la sincronizzabilità della rete 2.3 nel rispetto di una specifica configurazione di accoppiamento, è detta forte se la rete riesce a sincronizzarsi anche per bassi valori di forza di accoppiamento c.
Proponiamo ora un’analisi basata sulla teoria di stabilità di Lyapunov di cui riportiamo brevemente i punti salienti.
Teorema 2.1 [12]
Sia x = 0 un punto di equilibrio per il generico sistema non lineare
ovvero f(0) = 0 e Ω un intorno del suddetto punto di equilibrio (0 Є Ω C ℜn).
Se esiste una funzione V : ℜn→ ℜn continua e differenziabile che soddisfa le seguenti proprietà:
38
2. V(x) > 0 ;
3. (x) ≤ 0
possiamo affermare che il punto di equilibrio x=0 è localmente stabile. Inoltre se la
(x) < 0 allora x=0 è Localmente Asintoticamente Stabile (LAS). Il teorema appena enunciato non garantisce l’esistenza di una funzione di Lyapunov stabilizzante, né ci fornisce uno strumento analitico per il calcolo della stessa. Tuttavia però, per sistemi lineari è sorprendentemente semplice ricavarne un’espressione analitica.
Teorema 2.2 [12]
Consideriamo un generico sistema lineare:
caratterizzato dalla presenza dell’unico punto di equilibrio x=0.
Per sistemi lineari è possibile definire la seguente funzione di Lyapunov:
Sotto quali ipotesi la funzione V(x) rispetta le condizioni di stabilità enunciate nel teorema 2.1?
Si può osservare che le prime due condizioni sono semplici da validare: 1. V(0) = 0;
2. V(x) = xT P x > 0 essendo P >0;
Per la terza condizione abbiamo bisogno di un’ipotesi aggiuntiva. Scrivendo infatti l’espressione di (x) troviamo:
Affinché quindi l’ultima espressione risulti essere strettamente minore di 0 dobbiamo verificare che:
39
.
Quindi le condizioni di asintotica stabilità sostanzialmente sono le seguenti: Re{λi} < 0 ∀i
Il teorema 2.2 può facilmente essere esteso anche al caso di sistema non lineare passando opportunamente attraverso un processo di linearizzazione dello stesso nell’introno del punto di equilibrio di cui si vuole indagare la stabilità.
I risultati dei due teoremi precedentemente enunciati possono estendersi anche al caso di reti di sistemi dinamici non lineari come proposto da Wang & Chen in [13, 14]:
Teorema 2.3
Consideriamo il modello di rete 2.3. Siano:
0 = λ1 > λ2 ≥ λ3 ≥ … ≥ λN (2.10) gli autovalori della sua matrice di accoppiamento L. Supponiamo che esista una
matrice diagonale n x n D > 0 e due costanti , tali che
(2.11)
per tutti i valori di d ≤ , dove In ℜ n x n è una matrice identità.
Se, inoltre, vale:
(2.12)
lo stato di sincronizzazione (2.9) è esponenzialmente stabile.
Essendo λ2 < 0 e , la diseguaglianza (2.11) è equivalente a:
40 Un piccolo valore di λ2 corrisponde a un grande valore di |λ2|. Ciò implica che la rete può sincronizzarsi anche con una bassa forza di accoppiamento c. Quindi la sincronizzabilità della rete 2.3 nel rispetto di una specifica configurazione di accoppiamento può essere caratterizzata dal secondo più grande autovalore della corrispondente matrice Laplaciana di accoppiamento L.
2.4 L’approccio Master Stability Function
Un approccio alternativo per l’analisi di stabilità dello stato sincrono della rete è quello basato sulla Master Stability Function [15-16].
In riferimento al modello generale di rete (2.2) precedentemente introdotto, consideriamo una matrice di accoppiamento L simmetrica. Siano dunque λi e vi
rispettivamente gli autovalori e gli autovettori ad essi associati, tali che Lvi = λivi e
. Le condizioni 2.4, 2.5 e 2.6 sulla matrice di connettività L oltre ad assicurare l’esistenza della synchronization manifold S, garantiscono anche che gli autovettori vi associati agli autovalori λi (i=2,… ,N), spazzano tutte le direzioni dello
spazio di stato trasversali rispetto ad S.
Una condizione necessaria per la stabilità della synchronization manifold [16] è che l’insieme degli (N-1)n esponenti di Lyapunov1
che corrispondono alle direzioni del
1L’esponente di Lyapunov λ [20] costituisce una misura quantitativa della dipendenza di una traiettoria dalle
condizioni iniziali. Esso infatti rappresenta il tasso di convergenza (o divergenza) di due traiettorie con condizioni iniziali vicine. Dato un sistema n-dimensionale sarà presente un numero di esponenti di Lyapunov pari alla dimensione dello spazio delle fasi di tale sistema.
Per avere un’idea dello spettro degli esponenti di Lyapunov immaginiamo una sfera infinitesima di raggio dr il cui centro costituisce lo stato iniziale di una traiettoria
L’evoluzione del sistema deformerà questa sfera in un ellissoide, cioè, dopo un certo tempo finito t le traiettorie che avevano avuto origine nella sfera si troveranno nell’ellissoide. L’i-esimo esponente di Lyapunov è quindi definito da:
41 piano delle fasi trasversali all’iperpiano n-dimensionale x1= x2=...= xs, siano tutti
negativi. È importante sottolineare che tale condizione è necessaria, ma non sufficiente.
Sia δxi(t) = xi(t) – xs(t) = (δxi,1(t), δxi,2(t), … ,δxi,n(t))T lo scostamento dell’i-esimo
vettore di stato dalla synchronization manifold, si considerino gli N vettori colonna
n-dimensionali X = (x1, x2,… , xN)T e δX = (δx1, δx2,… , δxN)T.
Si ha quindi:
Dove con si è indicato il prodotto diretto tra matrici, e J sta per l’operatore Jacobiano caratteristico del processo di linearizzazione del sistema nell’intorno dello stato di sincronizzazione xs.
È necessario ora diagonalizzare il sistema 2.14 al fine di ottenere un set di N equazioni completamente disaccoppiate. Ciò è possibile andando a premoltiplicare il vettore δX precedentemente introdotto per la matrice Q-1, dove con Q si è indicata la matrice le cui colonne sono gli N autovettori di L.
Bisogna dunque eseguire la seguente trasformazione lineare:
che porta al seguente sistema N-dimensionale disaccoppiato:
Indicando con Ki = cλi (i=2…N) l’insieme di valori del parametro normalizzato K le
equazioni del sistema 2.16 sono strutturalmente equivalenti e differiscono solo per il parametro Ki. Quanto detto ci permette di riscrivere la 2.16 come:
42 Ognuna delle equazioni costituenti il sistema 2.17 è caratterizzata da n esponenti di Lyapunov i cui valori saranno funzione del parametro generalizzato K. L’andamento del più grande tra questi determina quella che in letteratura è nota come Master
Stability Function
Λ(K).
Per K > 0 si possono verificare tre distinti comportamenti in prossimità dell’origine a seconda della scelta di f(x) ed H(x):
Figura 2-3: Andamenti tipici della MSF
I) Λ(K) è una funzione monotona crescente. In questo caso, per come sono state scelte f(x) ed H(x) la sincronizzazione non è mai stabile. Per qualsiasi valore di c e per qualsiasi distribuzione degli autovalori il prodotto cλi porta sempre ad un massimo esponente di
Lyapunov positivo e quindi la synchronization manifold è sempre instabile.
II) Λ(K) è una funzione monotona decrescente che intercetta l’asse delle ascisse in un punto . In questo caso la rete ammette sempre la sincronizzazione a patto che c sia sufficientemente grande indipendentemente dalla topologia dell’accoppiamento (è
43 sufficiente prendere per garantire che a tutte le direzioni trasversali alla synchronization manifold sia associato un esponente di Lyapunov negativo).
III) Λ(K) è una funzione a forma di V che ammette valori negativi nell’intervallo 0 ≤ k1 < k < k2. Questo è il caso più interessante e corrisponde ad una classe molto ampia di funzioni f(x) ed H(x). In tal caso la condizione di stabilità è soddisfatta per i valori di c per i quali . La sincronizzabilità di una rete può essere completamente valutata tramite il rapporto
λ
N/
λ
2 tra il più grande ed il secondo più piccolo autovalore dello spettro della matrice di connettività L. Più gli autovalori sono compatti e maggiori sono le possibilità di avere tutti gli esponenti di Lyapunov all’interno della regione di stabilità per un determinato valore di c.44
3
C
ontrollo di reti complesse
Nei precedenti capitoli abbiamo analizzato le problematiche legate alla sincronizzazione di reti complesse, focalizzando l’attenzione sulle condizioni necessarie affinché lo stato sincrono sia asintoticamente stabile.
La necessità di introdurre strategie di controllo, nasce dal voler garantire una regolazione dei nodi costituenti la rete, verso uno stato di riferimento noto a priori.
I complessi protocolli di interazione, l’elevato numero dei sistemi interagenti e le dinamiche spesso non lineari degli stessi, hanno spinto la comunità scientifica internazionale verso un costante lavoro di ricerca rivolto alla sintesi di strategie di controllo innovative.
3.1 PINNING CONTROL
Volendo garantire un comportamento uniforme, noto a priori sulla base di un riferimento assegnato, di tutti i sistemi costituenti una rete complessa, sarebbe impensabile dotare ciascuno di essi di un’azione di controllo dedicata. La complessità della rete e l’elevato numero di nodi rappresentano i principali ostacoli alla sintesi di tecniche di controllo centralizzate.
Negli ultimi anni, notevoli traguardi nell’ambito del controllo di sistemi complessi sono stati raggiunti sfruttando tecniche di controllo decentralizzate, caratterizzate dalla presenza di azioni di feed-back locali, agenti cioè solo su di un sottoinsieme di nodi.
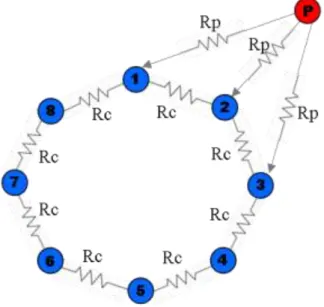
45 L’idea alla base di quello che in letteratura è stato indicato come pinning
control è quindi quella di controllare direttamente solo un sottoinsieme di
nodi, affidando alla capacità di sincronizzazione della rete il compito di ridistribuire l’azione di controllo anche ai sistemi non direttamente controllati. Questa tecnica sfrutta quindi la sincronizzazione finalizzata al controllo.
Vedremo come, selezionando opportunamente i sistemi direttamente controllati, seguendo opportuni criteri sulla base del grado relativo dei nodi e della topologia della rete, si garantiscono prestazioni sempre più spinte in termini di errore di inseguimento.
Come per il capitolo 2 verranno presentati due differenti approcci alla soluzione del problema di controllo. Uno basato sulla linearizzazione nell’intorno dello stato di riferimento, l’altro sull’innovativo concetto di
pinning controllability recentemente introdotto.
3.2 Analisi di stabilità locale
Consideriamo il modello generale di rete presentato nel capitolo 2:
caratterizzato da nodi identici.
In [18] viene proposta l’analisi di stabilità di cui si riportano i punti salienti.
Supponiamo di voler stabilizzare la rete 3.1 su di un omogeneo stato stazionario definito da:
tale che
Si vuole raggiungere l’obiettivo del controllo applicando azioni di retroazione lineari localmente ad una frazione di nodi δ (0 < δ < 1).