Capitolo 5: Costruzione del tessuto sensorizzato
5.1 Generalità e caratteristiche del materiale piezoresistivo usato
É stato scelto un materiale a basso costo, di facile reperibilità e lavorabilità, l’Elastosil LR 3162 A-B, prodotto commerciale utilizzato nell’edilizia per creare un isolamento elettromagnetico (gabbia di Faraday), della ditta tedesca
Wacker ltd (http://www.wacker.de). Il prodotto presenta buone proprietà sia
meccaniche che elettriche ed una veloce vulcanizzazione. E’ composto da due componenti A e B che sono miscelati in rapporto di 1:1 per circa 30 minuti con aggiunta di trifluorocloroetilene. Alla fine di questa fase il composto acquisisce una consistenza gommosa.
La deposizione del prodotto sul tessuto avviene utilizzando la maschera in precedenza realizzata. In seguito, il prototipo è cotto in forno ad una temperatura di circa 120 °C per circa 15 minuti, così da avere l’evaporazione del
trifluorocloroetilene, la vulcanizzazione e l’adesione del materiale al tessuto.
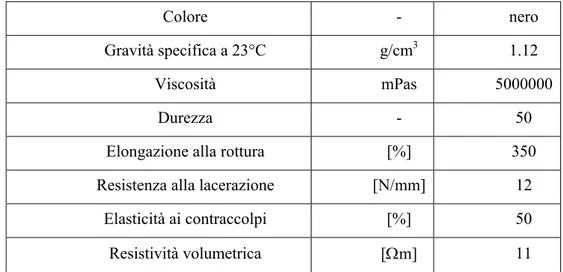
Nella tabella 5.1 sono elencate alcune caratteristiche dei componenti A e B:
Colore - nero
Gravità specifica a 23°C g/cm3 1.12
Viscosità mPas 5000000
Durezza - 50
Elongazione alla rottura [%] 350
Resistenza alla lacerazione [N/mm] 12
Elasticità ai contraccolpi [%] 50
Resistività volumetrica [Ωm] 11
5.1.1 Fattore di gauge dell’Elastosil LR 3162 A-B
Per il calcolo del fattore di gauge è stato usato un campione di tessuto sensorizzato di lunghezza l0=10cm e la larghezza 1cm, che presentava una
resistenza a riposo di R0=5,2KΩ. Le misure sono state eseguite distendendo il
campione a lunghezze note e poi misurando con un multimetro digitale il valore della relativa resistenza; in tabella 5.2 sono riportati i valori degli allungamenti e le rispettive resistenze: l R 10 cm 5,2 KΩ 11 cm 6,8 KΩ 12 cm 8,1 KΩ 13 cm 9,3 KΩ 14 cm 11,4 KΩ 15 cm 13,5 KΩ Tabella 5.2
In figura 5.1 è graficato l’andamento della curva ottenuto con i valori misurati sperimentalmente a tratto continuo e la retta di tendenza a tratto alternato.
Il fattore di gauge mediato sulle varie deformazioni (pendenza della linea tratteggiata) risulta essere:
3 0 0 ≅ ∆ ⋅ ∆ = l l R R Gf 0 0,25 0,5 0,75 1 1,25 1,5 0% 10% 20% 30% 40% 50% 60% Figura 5.1 0 R R ∆ 0 l l ∆
Sono stati raggiunti allungamenti del 50% della lunghezza iniziale; oltre questa percentuale, eventuali stress meccanici non controllati, dovuti al supporto del sensore, potrebbero alterare la misura.
5.2 Configurazione dei sensori
Sono possibili diverse topologie per costruire un array di sensori che consenta di avere informazione, anche ridondante.
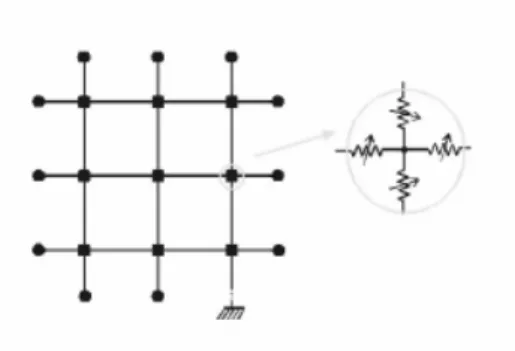
Una prima soluzione sperimentata è stata la disposizione a matrice (figura 5.2) dove quadripoli resistivi sono interconnessi fra loro.
Figura 5.2: Struttura a matrice
In figura 5.3 ne è mostrata la realizzazione:
Figura 5.3
Il funzionamento è il seguente: è fissato come riferimento un nodo di vertice della struttura quadrangolare, ma in generale può essere un nodo qualsiasi del perimetro; usando un multiplexer è iniettata una corrente costante da ogni nodo del perimetro, escluso il nodo di riferimento; con un secondo multiplexer è
prelevata la tensione tra il riferimento e tutti gli altri nodi del bordo, separatamente per ogni corrente entrante da un nodo diverso, ma in generale è potrebbero essere usate tutte le combinazioni tra i nodi del perimetro. Con questo metodo, è dimostrato [1] che è teoricamente individuabile il singolo sensore che, sollecitato, genera le variazioni di tensione.
Tuttavia, sono stati riscontrati alcuni problemi che ne hanno determinato il momentaneo accantonamento: l’acquisizione di dati con semplici test analizzati con il metodo della PCA (Principal Component Analysis) ha dato mediocri risultati. Il problema risiede non nell’elettronica, ma nel tipo di sensori, che rispondono in modo piuttosto complesso; risultati incoraggianti sono, invece, stati raggiunti untilizzando una configurazione di tipo serie.
La configurazione scelta è stata, quindi, quella serie: la tensione è prelevata su ogni singolo sensore, e ciò permette algoritmi più semplici per estrarre l’informazione dai dati.
5.3 Studio preliminare per la disposizione del film piezoresistivo
La scelta della posizione dei sensori è supportata da lavori svolti in precedenza, essendo stati ritenuti adeguati, allo stadio attuale del progetto FACE, a fornire indicazioni precise sull’anatomia e sul movimento dei muscoli facciali.
Sono stati esaminati alcuni lavori concernenti l’analisi del volto umano, che utilizzano sistemi outside-in che possono includere markers ottici, sistemi inside-in come l’EMG, oppure soluzioni combinate.
Essa e Pentland [2] sfruttano l’osservazione diretta del volto con videocamera, e grazie a complessi passaggi a livello software individuano aree di attivazione coinvolte in certe espressioni. In figura 5.4 è dato un esempio del loro
lavoro: sono riportate le immagini riguardanti le aree che si attivano durante le espressioni indicate nella figura stessa.
Figura 5.4
Vatikiotis-Bateson et al. [4] hanno usato l’EMG e la ripresa con videocamera all’infrarosso per ricavare il movimento della pelle ed i muscoli usati durante prove di fonazione: in figura 5.5 è possibile distinguere i punti numerati corrispondenti agli elettrodi dell’EMG ed i punti di collocazione dei markers ottici.
Spesso, nel campo del riconoscimento delle espressioni facciali si fa rifermento alla codifica di Ekman e Friesenn: il FACS (Facial Action Coding
System). il FACS è un metodo per descrivere “tutti i movimenti facciali
distinguibili visivamente” [4]; esso è fondato sull’enumerazione di 46 action units (AU), ognuna caratterizzante il movimento di una certa regione del volto, e la loro combinazione codifica le diverse espressioni.
Tuttavia sono avanzate critiche alla codifica FACS in merito all’eccessiva rigidezza applicativa [2]: le action units sono patterns spaziali di tipo locale, e non è garantito che una determinata espressione sia codificata sempre dalle medesime AU; la codifica FACS non è in grado di descrivere i piccoli movimenti delle labbra e dell’occhio e non rileva gli effetti della coarticolazione molto comuni nella fonazione.
Nel progetto FACE si prescinde dalla codifica FACS: l’elaborazione dei dati è affidata ad una rete neurale in grado di estrarre una propria codifica e di autoapprendere l’espressività umana sulla base di features di volti reali.
5.3.1 Determinazione dei muscoli da osservare
Considerando i lavori sopra accennati, è stato individuato un numero contenuto di muscoli da osservare con il sistema realizzato in questo lavoro di tesi.
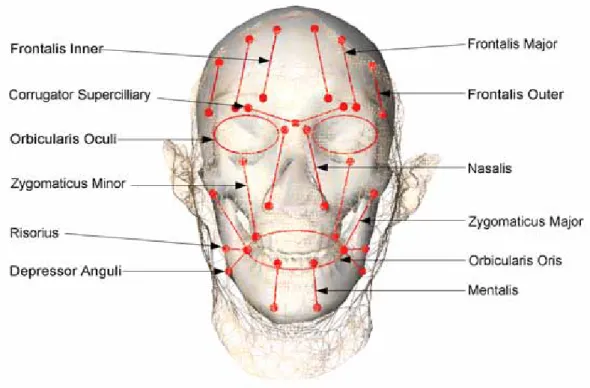
In figura 5.6 sono indicati schematicamente alcuni muscoli del volto umano; essi sono quelli suggeriti da Ekmann e Friesen [4].
Qui sono stati selezionati quelli ritenuti sufficienti a produrre una deformazione apprezzabile dei sensori piezoresistivi, questi ultimi perciò collocati
in modo che i punti di prelievo della tensione presente ai capi del singolo sensore coincidessero, per quanto possibile, con i punti d’innesto del muscolo correlato.
Figura 5.6: Punti d’innesto dei principali miscoli facciali
Questa scelta tende a far sì che la deformazione del sensore avvenga quasi completamente in senso longitudinale, e quindi il sensore risponda seguendo la massima dinamica dell’azione muscolare.
Sono stati selezionati i seguenti muscoli: Frontalis Major, Frontalis
Interno, Corrugator Superciliare, Zygomaticus Major, Zygomaticus Minor, Orbicularis Oris, Orbicularis Oculi, Mentalis, Risorius.
Essi determinano i movimenti più importanti del viso e sono coinvolti in espressioni anche molto diverse tra loro, quindi adatti a permettere lo svolgimento di test più o meno impegnativi, sia per i dispositivi di acquisizione che per quelli di elaborazione dei dati.
Risulta evidente l’asimmetria rispetto al piano sagittale: è una scelta tecnica di prima approssimazione. Non solo si è inteso limitare il numero di acquisizioni a quelle giudicate essenziali, ma anche capire se determinate espressioni possano essere colte univocamente osservando non l’intero del volto, ma aree limitate. Non ultimo, avere una struttura simmetrica sarebbe stato ridondante, e, oltre a richiedere un numero maggiore di sensori e di conseguenza un’elettronica più complessa, non avrebbe aggiunto informazione tenendo conto degli obiettivi a breve termine prefissati.
5.4 Layout del film piezoresistivo
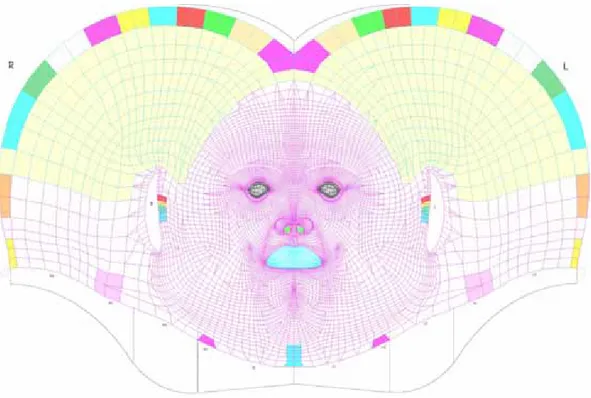
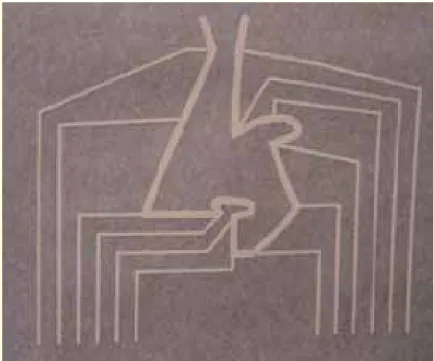
Stabiliti i muscoli da osservare, è stato necessario pensare ad un procedimento che, seppur artigianale, consentisse una deposizione accurata e riproducibile. E’ stata usata una mappa bidimensionale della testa umana (figura 5.7): ovviamente, l’uso di due dimensioni per rappresentare oggetti tridimensionali provoca distorsioni; ma queste sono completamente assorbite nella messa in opera, avendo impiegato un tessuto con proprietà elastiche notevoli (un tessuto misto cotone-lycra®, con ottima resistenza meccanica, con un coefficiente di rigidità molto basso che non ostacola il movimento), pretensionato, in modo che esso e i sensori deposti aderiscano alla testa, sia essa artificiale o no.
Figura 5.7 : Mappa bidimensionale di una testa umana
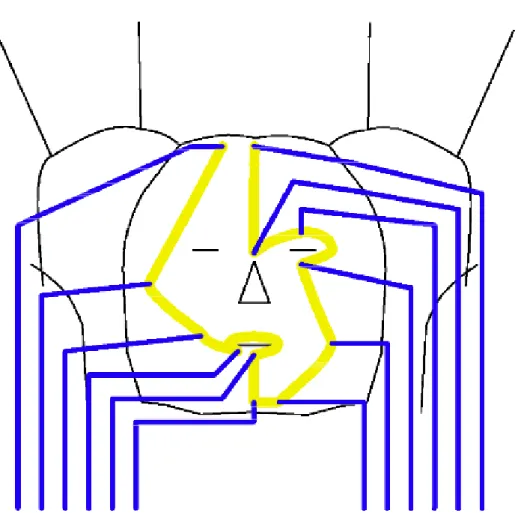
Sono stati fissati i punti d’innesto dei muscoli sulla mappa bidimensionale, tracciate le linee guida di un volto schematico e il percorso dei sensori (figura 5.8), con l’ausilio di CAD grafico, per la deposizione del film piezoresistivo; poi il modello è stato utilizzato per sagomare il tessuto elastico di supporto per i sensori, in modo da ricavare una maschera indossabile che avvolge tutta la testa.
Figura 5.8: Layout delle linee guida e del percorso sensorizzato
In figura 5.8 è tracciata in giallo la disposizione dell’array di sensori, in blu le piste che collegano i sensori all’elettronica; il tracciato blu indica anch’esso delle piste realizzate con lo stesso materiale dei sensori: non c’è, perciò, la presenza di cavi metallici sul tessuto sensorizzato, quindi non ci sono elementi che ne comprometterebbero le caretteristiche elastiche, la facile integrazione nella struttura di FACE ed anche le doti di comfort qualora siano richieste.
L’interfaccia tra il materiale siliconico e i cavi metallici per la connessione elettrica è realizzata per mezzo di comuni bottoncini di metallo usati nell’abbigliamento, che hanno buona stabilità meccanica.
Il layout elettronico è stato affidato ad una ditta specializzata, che tramite tecniche laser ha restituito il layout fisico, consistente in un foglio biadesivo (figura 5.9) con ritagliata la parte coincidente con il percorso dei sensori sul tessuto.
Figura 5.9: Layout fisico per la stesura del composto piezoresistivo
Alla fine, il tessuto e i sensori si presentano come un corpo unico. Il prototipo realizzato è mostrato in figura 5.10.