Capitolo 5 – Simulazione dell’ingranamento
La simulazione del contatto permette un’analisi numerica avanzata al fine di individuare le tensioni sia in superficie che internamente al dente; software commerciali utilizzano questo metodo aiutando il progettista nel proprio lavoro.
Importante è l’attendibilità dei risultati forniti da questi programmi per cui risulta necessario validare il processo di calcolo impiegato; al DIMNP è stato sviluppato un codice che ha questo scopo relativamente a Hypoid face milled della ANSol.
In particolare tale software viene utilizzato per conoscere le tensioni dell’ingranaggio da progettare e utilizzare sul banco modificato.
5.1 Analisi dei contatti (TCA)
L’analisi del contatto dell’ingranamento fu introdotta all’inizio degli anni sessanta dalla Gleason, con tale teoria si analizzavano le caratteristiche dei contatti, con l’uso del calcolatore, del moto di una coppia conica spirale o ipoide sotto leggero carico.
Negli ultimi trenta anni la T.C.A. ha subito notevoli miglioramenti ed è utilizzata con soddisfazione dalla maggior parte dei produttori.
La maggior limitazione consiste nel fatto che il sistema albero/supporti è considerato rigido per cui i carichi più elevati, che estendono la loro influenza oltre le ruote in maniera significativa, la teoria è meno precisa[11]; nonostante questo viene eliminato quasi totalmente il lavoro d’officina definito come “sviluppo della coppia”.
Studi attuali come quello presso il DIMNP prevede la simulazione FEM anche di parte della ruota per tenere conto delle limitazioni sopra accennate.
L'obbiettivo principale della simulazione dell'ingranamento e del contatto è la determinazione dell'errore di trasmissione e del contatto esteso (bearing contact) che corrispondono all'insieme di parametri macchina e di geometria degli utensili.
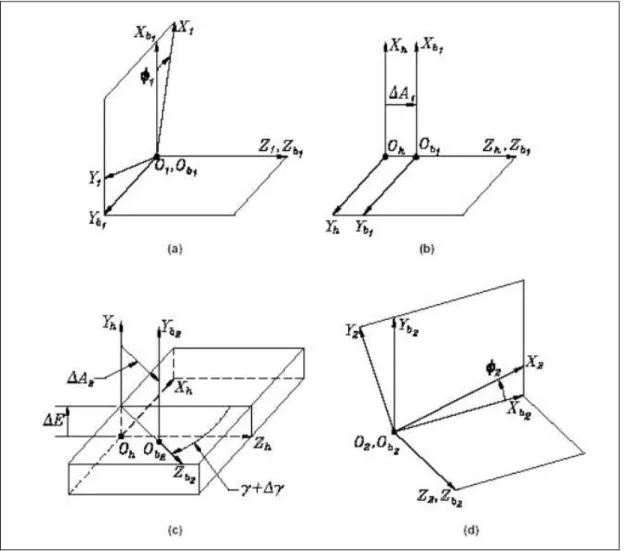
Nella descrizione della TCA verrà fatto riferimento ai pedici 1 e p che identificano il pignone, e ai pedici 2 e g relativi alla corona.La simulazione di ingranamento delle superfici dei denti viene effettuata nel sistema di coordinate fisso Sh, che è rigidamente connesso con il carter della trasmissione. I sistemi S1 e S2 sono rigidamente connessi rispettivamente con pignone e ruota (corona); I sistemi di riferimento ausiliari Sb1 e Sb2 sono utilizzati per descrivere le rotazioni del pignone (rispetto a Sb1) e della corona (rispetto a Sb2). Gli errori di
disallineamento vengono simulati mediante lo spostamento dei sistemi di riferimento Sb1 e Sb2 rispetto a Sh.
Nella figura 5.1 sono mostrati i sistemi di riferimento applicati per la simulazione dell’ingranamento: (a) illustrazione della rotazione del pignone; (b) illustrazione dello spostamento A1; (c) illustrazione degli spostamenti A2 e E e dell’errore angolare γ; (d) illustrazione della rotazione della ruota.
Fig. 5.1 Gli errori di montaggio modellati sono i seguenti:
DA1, spostamento lungo il proprio asse z1 del pignone. E' positivo se il pignone viene spostato fuori dall'ingranamento.
Dg, variazione dell'angolo di progetto della trasmissione. E' positivo se l'angolo attuale della trasmissione µe maggiore rispetto a quello di progetto.
DE, minima distanza fra gli assi del pignone e della ruota nel caso in cui gli assi delle ruote siano sghembi.
DA2, spostamento lungo il proprio asse z2 della corona. E' positivo se la corona viene spostata fuori dall'ingranamento.
Nel caso di una trasmissione in cui le ruote sono perfettamente allineate e dunque nella condizione di progetto, si considera che DA1, Dg, DE e DA2 sono tutti uguali a zero.
Durante l'ingranamento, le superfici del pignone e della ruota devono essere fra loro tangenti e ciò impone che i loro vettori posizione ed i loro versori normali coincidano per ogni coppia di valori (f1; f2) degli angoli di rotazione del pignone e della corona.
Nel sistema di riferimento Sh le superfici del pignone e della corona sono così rappresentate:
(
1 1)
1( )
1 1(
1)
) 1 ( , , , 1 1 f J f f y Jp hb b p h M M r r = (5.1)(
2 2)
2( )
2 2(
2)
) 2 ( , , , 2 2 f J f f y Jg hb b g h M M r r = . (5.2)Sempre in Sh i versori normali alle superfici :
(
1 1)
1( )
1 1(
1)
) 1 ( , , , 1 1 f J f f y Jp hb b p h L L n n = (5.3)(
2 2)
2( )
2 2(
2)
) 2 ( , , , 2 2 f J f f y Jg hb b g h L L n n = . (5.4)La condizione di tangenza continua fra il pignone e la ruota è rappresentata dalle seguenti equazioni:
(
, 1, 1)
(2)(
, 2, 2)
0 ) 1 ( = - J y f f y J p h g h r r (5.5)(
, 1, 1)
(2)(
, 2, 2)
0 ) 1 ( = - J y f f y Jp h g h n n (5.6)Le superfici S1 e S2 sono rappresentate in Sh ciascuna da tre parametri. I primi due rappresentano le coordinate parametriche che descrivono la posizione di un punto sulla superficie. Il terzo è il parametro di moto che controlla la rotazione della superficie intorno al proprio asse.
Le equazioni (5.5) e (5.6) impongono che le superfici S1 e S2 abbiano vettori posizioni e versori normali coincidenti nei loro punti di tangenza. L'equazione (5.5) fornisce tre equazioni scalari, mentre la (5.6) ne fornisce due dato a causa del vincolo di modulo unitario dei versori normali. Dunque, il sistema precedente fornisce in totale 5 equazioni scalari in 6 incognite. Tuttavia, l'angolo di rotazione del pignone f1 viene considerato come un parametro di input
î
í
ì
che controlla la posizione dell'ingranaggio, perciò il sistema risulta di 5 equazioni in 5 incognite. L'angolo f1 di rotazione del pignone viene fatto variare nel range f Î [-p/N1; p/N1]. I parametri (qp; y1) per il pignone, i parametri (qg; y 2) e l'angolo di rotazione f2 per la ruota, sono determinati risolvendo il sistema precedente.
Tale sistema è risolvibile in tutti i punti di ingranamento, essendo soddisfatte le condizioni del teorema di Dini, è quindi possibile determinare i percorsi di contatto delle superfici dei denti; nei sistemi di riferimento S1 e S2 le soluzioni risultano :
( )
( )
(
1 , 1 1)
1Jp f y f r , (5.7)( )
( )
(
1 , 2 1)
2Jg f y f r , (5.8)La funzione degli errori di trasmissione, che costituisce il generico tratto elementare del grafico di moto, è definita come segue
( )
( )
1 2 1 1 2 1 2 f f f f f N N -= D (5.9)e rappresenta l'errore angolare Df2 di rotazione della corona rispetto alla condizione di
superfici ingrananti coniugate, per ogni angolo f1 di rotazione del pignone.
Può essere definita anche da
( )
( )
2 1 2 2 1 2 1 f f f f f N N -= D (5.10)e in questo caso rappresenterebbe l'errore angolare Df1 di rotazione del pignone rispetto alla
condizione di superfici ingrananti coniugate, per ogni angolo f2 di rotazione della ruota. Si
ricorda che una certa forma dell'errore di trasmissione è imposta, mediante disallineamenti angolari e offset assiali, in fase di progetto degli ingranaggi spiroconici per ottenere benefici sulla qualità dell'ingranamento in condizioni di carico operativo.
5.2 Codici di calcolo
Relativamente allo stato delle ricerche in ambito della simulazione dell’ingranamento si riportano i risultati dello studio in corso effettuato dal DIMNP in collaborazione con AVIO S.p.A. che risulta tra i più avanzati a livello internazionale.
Viene sinteticamente descritto il confronto fra la TCA calcolata dal codice DIMNP e quella valutata da Hypoid Face Milled.
5.2.1 Codice DIMNP
Il modello analitico di generazione di corona e pignone è organizzato in un codice di calcolo scritto in ambiente Mathematica 4.0. Tale codice permette la creazione diretta di modelli AutoCAD dei denti per una completa fruizione della geometria e la creazione automatizzata di modelli ad elementi finiti in ambiente Ansys per l’analisi del contatto sotto carico statico, detta anche SLTCA (Static Loaded Tooth Contact Analysis).
Fig. 5.2
Nel paragrafo 5.1 sono state analizzate le condizioni di ingranamento in condizioni di rigidezza infinita; se si introducono nei modelli le caratteristiche meccaniche reali del materiale e si applica una coppia motrice, ci si sposta dal dominio della TCA a quello della LTCA (Loaded Tooth Contact Analysis). Ancora una volta le grandezze principali sono la
funzione di trasmissione (e quindi l'errore di trasmissione) e il bearing contact, che stavolta interessa più coppie di denti in presa a causa della deformabilità del modello.
Insieme alla LTCA è di fondamentale importanza la stress analysis, ovvero l'analisi dello stato di tensione. Tipicamente vengono rilevate la tensione equivalente secondo Von Mises, la tensione principale S1 e le pressioni di contatto.
Per la valutazione di LTCA e stress analysis, i valori delle grandezze date in input al software sono state le stesse di quelle utilizzate per la TCA.
Al DIMNP è stato sviluppato un modello ad elementi finiti della coppia di trasmissione Avio WP140 27-38, per l’ambiente software di simulazione è stato scelto Ansys 8.0 .
Per la riproduzione della geometria dei denti in Ansys si è adottato un approccio di tipo bottom-up, partendo da punti (keypoints) campionati sul modelli teorici dei denti di ruota e pignone. Tale operazione è stata compiuta tramite il codice DIMNP, seguendo il procedimento che viene presentato; è stata ripetuta per le 7 posizioni di ingranamento già analizzate in termini di TCA.
Per determinare le porzioni di superficie che effettivamente costituiscono la superficie del dente reale, occorre determinare dei limiti per le superfici reali che costituiscono i bordi del dente fisico. L'approccio utilizzato consiste nell'estrarre un certo numero di punti, definito a priori dall'utente, tenendo conto di tali limiti. Questa operazione deve essere effettuata separatamente sia per la superficie del fianco attivo (a) del dente che per quella del raccordo alla base del dente (b)
Il campionamento (a) si ottiene intersecando una famiglia di curve data dall’intersezione della superficie del fianco attivo con una famiglia di coni paralleli al back cone con una seconda famiglia ottenuta sempre dall’intersezione della superficie del fianco attivo questa volta però con la famiglia di coni di vertice coincidente con quello del face cone e angolo di apertura variabile.
In modo simile si ottiene il campionamento (b) dove le superfici da intersecare sono la famiglia di curve data dall’intersezione della superficie di raccordo con una famiglia di coni paralleli al back cone e la famiglia di curve, nel piano dei parametri qp e y1, che si ottiene al
variare di un parametro; si definiscono i limiti di tale parametro e quello che definisce la famiglia dei coni in modo da avere una griglia uniforme con quella ottenuta dal campionamento (a).
In ambiente Ansys 8.0 si è quindi creato il modello cercando di ottimizzare i campionamenti al fine di non avere discontinuità nei risultati e non appesantire il processo di calcolo.
Fig. 5.3
Le fasi successive sono state quelle di creare due settori di corona e pignone composti ciascuno da 5 denti (essendo circa 3 il rapporto di ricoprimento per la coppia esaminata),
meshare il modello, vincolarlo e caricarlo. Tutte queste operazioni sono state ripetute per sette volte, dal momento che sette sono le posizioni relative di ruota e pignone da analizzare (e quindi sette sono i modelli ad elementi finiti sviluppati).
5.2.2 Hypoid face milled
Questo software, sviluppato da Sandeep Vijayakar e Samir Abad con il supporto del Glenn Research Center della NASA, permette l’analisi del contatto di ruote coniche ingrananti, sia che gli assi siano concorrenti sia che risultino dotati di un certo offset .
Il DIMNP nel lavoro del Prof. Ing. M.Guiggiani, dell’Ing. F. Di Puccio, dell’Ing. M. Gabiccini e dell’Ing. A. Artoni, ha condotto una valutazione delle potenzialità di questo software nell’ambito della capacità di modellazione geometrica e TCA, e delle potenzialità di analisi delle sollecitazioni e LTCA.
Al fine di una corretta comparazione il modello sviluppato dal DIMNP ha riprodotto fedelmente la modellazione dei vincoli e dei carichi applicati di Hypoid face milled (Fig. 5.5).
In merito all'analisi delle modalità di rappresentazione geometrica del software Hypoid Face Milled, si può senz'altro asserire che l'accuratezza nella riproduzione del modello è buona. L'errore medio si attesta su valori attorno al decimo di micron, fatta eccezione per alcuni punti localizzati sul raccordo del lato concavo del dente pignone (curvature elevate), in cui la capacità di rappresentazione della superficie approssimante di Hypoid Face Milled non è elevata, ma senz'altro sufficiente (Fig. 5.6).
Per quanto concerne la TCA, i risultati della funzione di trasmissione mostrano un corretto andamento qualitativo, ma presentano sensibili differenze rispetto ai valori dell'errore di trasmissione (Fig. 5.7) calcolati dal codice DIMNP:
Fig. 5.7 - analisi della coppia WP140
Errori di trasmissione del codice DIMNP (in rosso) e di Hypoid Face Milled (in nero) Fig. 5.6
questo essenzialmente per due motivi:
il primo è che le superfici dei denti del codice ANSol non sono quelle teoriche (adottate dal codice DIMNP durante tutta l'analisi), ma sono il risultato di un'interpolazione mediante superfici polinomiali di un insieme di punti campionati sul modello teorico.
Il secondo è che Hypoid Face Milled non accetta in input una coppia motrice nulla, quindi anche le microdeformazioni causate dalla coppia - seppur modestissima - in ingresso possono alterare la funzione di trasmissione.
I risultati della LTCA in termini di errore di trasmissione sono buoni, con un errore massimo del 3% rispetto ai valori calcolati dal codice DIMNP e con uno stesso andamento qualitativo. Il bearing contact calcolato da Hypoid Face Milled, invece si limita ad estrarre le zone di contatto principali non interessate da fenomeni di bordo. Di conseguenza sono alterati i valori dei risultati in termini di pressione di contatto, tensione equivalente secondo Von Mises e tensione principale massima. Probabilmente questo tipo di comportamento è da attribuire alla grossolanità del mesh template (MEDIUM) adottato nella presente analisi.
I risultati ottenuti consentono comunque di stimare almeno l'ordine di grandezza delle componenti dello stato di sollecitazione, con la concreta speranza che un’analisi che utilizzi un mesh template più fine (FINEST) possa dare risultati migliori, considerando che in zone a minor curvatura i livelli d’errore sono minori.