Capitolo 2 – Soluzione 1:sottopasso stradale urbano
2.1 Descrizione della Soluzione 1
Il paese di Altopascio è fisicamente tagliato in due in direzione est-ovest da due importanti infrastrutture: la linea ferroviaria Pistoia-Lucca e l’autostrada A11 Firenze mare con ricadute diverse sull’abitato.
Infatti l’autostrada è solamente una barriera visiva e grazie ad un sottopasso fruibile, sia dai mezzi pesanti che dai pedoni, non interrompe la Francesca Romea, strada principale del paese in direzione Nord-Sud.
La ferrovia e il relativo passaggio a livello rappresentano invece un vero e proprio sbarramento fisico che da origine a disagi di diversa natura.
A causa delle lunghe code dei veicoli (automobili e mezzi pesanti), create dai notevoli tempi di attesa, gli abitanti delle case che si affacciano sulla strada subiscono danni derivanti dal rumore e dall’inquinamento.
Nello stesso tempo si creano disagi anche per gli automobilisti obbligati a rimanere fermi in attesa che si apra il passaggio a livello.
Il passaggio dal centro diventa obbligatorio anche per chi dalla zona industriale situata a Nord del paese deve immettersi sull’autostrada A11 dal casello “Altopascio” con conseguenti danni economici dovuti ai tempi persi.
La prima soluzione che andiamo ad analizzare è quindi quella che può risolvere in parte questi problemi nel modo meno costoso possibile.
Si è pensato infatti di andare a realizzare un sottopasso ferroviario in modo da poter eliminare il passaggio a livello.
Il problema principale è stato quello di non interrompere la continuità della via Romea.
La cosa ideale infatti sarebbe stata la realizzazione del sottopasso lungo il percorso attuale della strada.
Da una prima analisi si è verificato che sarebbe stato impossibile mettere in pratica tale progetto a causa della mancanza di spazi sufficienti.
Era necessario quindi individuare una zona relativamente libera da edifici e non troppo lontana dal tracciato, caratteristica necessaria in quanto mirata a “ricucire” il paese stesso.
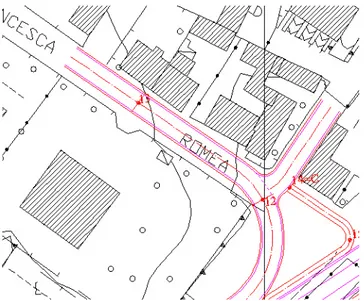
Analizzando la cartografia di Altopascio in scala 1:2000, tale zona è stata individuata e a Sud della ferrovia si è pensato di realizzare una rotatoria a tre bracci sulla via Bientinese a circa 400 metri dall’incrocio con la via Romea.
I primi bue tracci garantiscono la continuità della strada che porta ad Altopascio, mentre dal terzo braccio parte la strada che comincia a scendere in modo da poter passare sia sotto l’autostrada, sia sotto la ferrovia.
Il tracciato del sottopasso è stato studiato in modo che passi non sotto l’attuale tracciato della linea Pistoia-Lucca, ma sotto il nuovo tracciato studiato dalle RFI in modo da avere un raggio di curvatura e quindi una velocità maggiore e la possibilità altresì di realizzare il raddoppio del binario.
Superata la linea ferroviaria, la strada comincia a risalire costeggiandola ritornando poi al piano di campagna, a circa 40 metri dalla via Romea.
In questo modo è stato risolto il problema per gli automobilisti e per chiunque abbia un mezzo a motore, ma il paese resta sempre diviso in due sia per i ciclisti che per i pedoni.
E’ per questo che si è pensato di andare a realizzare anche un sottopasso ciclabile ed uno pedonale.
La Soluzione 1 consente quindi di andare ad eliminare il passaggio a livello con tutti i benefici che questo mi comporta ma purtroppo non mi evita il passaggio di mezzi pesanti dal centro del paese.
Dal D.M. del 5/11/2001 otteniamo le dimensioni degli elementi di cui la sede stradale si compone considerando che il sottopasso è una strada urbana di quartiere:
Fig. 5: Dimensione degli elementi della sede stradale
Sono state prese in considerazione le dimensioni della soluzione base ad 1+1 corsie di marcia.
2.2 Andamento planimetrico dell’asse
Si definisce andamento planimetrico dell’asse stradale, la proiezione dall’asse della strada, in questo caso quello della carreggiata stessa, su di un piano orizzontale.
Il tracciato planimetrico è costituito da una successione di elementi geometrici tradizionali, quali i rettifili, le curve circolari ed i raccordi a raggio variabile, che in questa fase dello studio non andiamo ad inserire.
Ai fini di garantire una soluzione sicura, confortevole per gli utenti e soddisfacente dal punto di vista ottico, è necessario adottare per la planimetria e per l’altimetria, che sarà ad analizzata separatamente in un secondo tempo, soluzioni coordinate e compatibili con le velocità di progetto.
-rettifili:
Per evitare il superamento delle velocità consentite, la monotonia, la difficile valutazione delle distanze e per ridurre l’abbagliamento nella guida notturna è opportuno che i rettifili abbiano una lunghezza Lr contenuta nel seguente limite: max 22 p r V L = × dove,
Vp max = limite superiore dell’intervallo di velocità di progetto della strada in km/h
Inoltre, in genere, l’adozione dei rettifili di lunghezza limitata favorisce l’inserimento della strada nell’ambiente.
Un rettifilo, per poter essere percepito come tale dall’utente, deve avere una lunghezza non inferiore ai valori riportati nella seguente tabella; dove per velocità si intende la massima desunta dal diagramma di velocità per il rettifilo considerato.
Tab 2. : Lunghezza minima rettifilo
-curve circolari:
Una curva circolare per essere correttamente percepita, deve avere uno sviluppo corrispondente al tempo di percorrenza di almeno 2,5 secondi valutato con riferimento alla velocità di progetto della curva.
Tra il rettifilo di lunghezza Lr ed il raggio più piccolo fra quelli delle due curve collegate al rettifilo stesso deve essere rispettata la relazione:
R > Lr per Lr < 300 m R ≥ 400 m per Lr ≥ 300 m
I rapporti tra i raggi R1 e R2 di due curve circolari che si succedono lungo il tracciato di strade di tipo A,B,C,D e F sono regolati dall’abaco riportato nella Fig. 6. In particolare per le strade di tipo A e B detto rapporto deve collocarsi nella “zona buona”; per le strade degli altri tipi è utilizzabile pure la “zona accettabile”.
Fig. 6: Rapporto tra i raggi di due curve circolari consecutive
2.3 Verifiche andamenti planimetrici
Il tracciato del sottopasso non può essere considerato come il tracciato di una vera e propria strada che da progettare.
Infatti molto forti sono i vincoli causati sia dall’obbligo di essere il più vicino possibile al centro del paese, sia dalla presenza di numerosi edifici già esistenti nonché dalle due importanti infrastrutture come quella autostradale e ferroviaria.
In considerazione di quanto sopra si è cercato di rispettare la normativa vigente e nello stesso tempo si è cercato di evitare il più possibile disagi agli utenti.
L’intervallo della velocità di progetto per una strada urbana di quartiere è 40-60 km/h.
-verifiche dei rettifili
Sono presenti solamente 2 rettifili nella planimetria del sottopasso: il primo quello più a Sud e il secondo a Nord.
Lr1 = 76,98 m Lr2 = 115,18 m
Dalla normativa posso calcolare i seguenti valori: Lr max = 1320 m lunghezza massima consentita
-verifiche delle curve circolari
Sono presenti tre curve circolari che anche in questo caso sono state numerate da Sud verso Nord.
Nessuna di queste si succede senza l’interposizione di un rettifilo, quindi non si fa la verifica del rapporto tra i raggi di due curve consecutive.
Raggio curva Sviluppo curva
R1 = 92,33 m Sc1 = 62,21 m R2 = 120 m Sc2 = 99.98 m R3 = 25 m Sc3 = 49.56 m
Considerando che l’intervallo superiore della velocità di progetto è di 60 km/h lo sviluppo minimo perché gli utenti percepiscano la curva è:
Scmin = 41.66 m
Gli sviluppi di tutte e tre le curve sono verificati.
Curva 1-2
Lr = 76,98 m
R1 il raggio più piccolo tra i due è maggiore della lunghezza del rettifilo e quindi la verifica è rispettata.
Curva 2-3
Lr = 115.18 m
Poiché R3 il raggio più piccolo tra i due è minore della lunghezza del rettifilo ne consegue che la verifica in questo caso non è rispettata, ma non era possibile fare altrimenti in quanto aumentando il raggio di curvatura avremmo dovuto abbattere il muro di cinta e gli alberi secolari (Fig. 7) del giardino dell’Istituto Santa Zita confinante con il tracciato del sottopasso, e questo non sarebbe stato permesso dall’Amministrazione del Comune di Altopascio.
Fig. 7: Muro di cinta del giardino dell’Istituto Santa Zita
2.4 Andamento altimetrico dell’asse
Il profilo longitudinale dell’asse stradale è costituito da una successione di segmenti di retta, detti livellette, aventi differenti inclinazione e raccordati tra di loro con raccordi concavi o convessi.
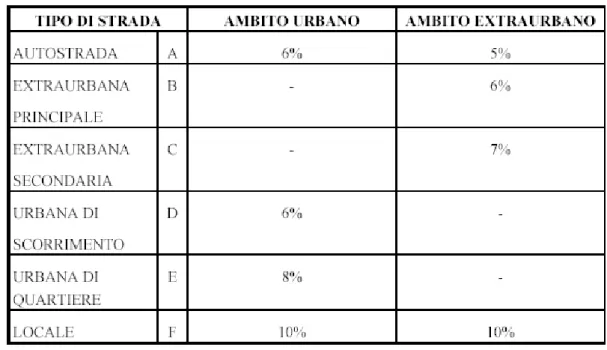
Le pendenze adottabili per i diversi tipi di strade sono fissati dalla normativa e sono riportati nella tabella sottostante.
Fig. 8: Pendenze massime adottabili per ogni tipo di strada
Nel nostro caso, essendo la strada un’ urbana di quartiere non dovrebbero esserci pendenze maggiori dell’8%, ma per ragioni di confort per gli utenti e per ridurre il più possibile le emissioni inquinanti, le livellette hanno una pendenza massima del 6%.
-raccordi verticali:
Tra due livellette consecutive, per garantire la sicurezza, il confort e la regolarità di marcia, è necessario inserire dei raccordi curvilinei; il D.M. 05/11/2001 prevede che tali raccordi siano eseguiti con archi di parabola quadratica ad asse verticale, il cui sviluppo viene calcolato con l’espressione:
100
i R L= v× ∆
dove,
Rv= è il raggio del cerchi osculatore nel vertice della parabola
∆i= è la variazione di pendenza in percento delle livellette da raccordare Rispetto al riferimento cartesiano indicato nella figura sottostante, l’arco di parabola da inserire tra le due livellette ha la seguente equazione:
2 x a x b y= ⋅ − ⋅ dove, L i a 2 100× ∆ =
;
100 1 i b=Il valore minimo del raggio Rv, che definisce la lunghezza del raccordo, deve essere determinato in modo da garantire:
a) che nessuna parte del veicolo (eccetto le ruote) abbia contatti con la superficie stradale; ciò comporta:
Rv ≥ Rv min = 20 m nei dossi Rv ≥ Rv min = 40 m nelle sacche
b) che per il confort dell’utente l’ accelerazione verticale av non superi il valore alim e pertanto si ha :
lim 2 a R v a v p v = ≤ dove,
vp = velocità di progetto della curva [m/s], desunta puntualmente dal diagramma delle velocità.
Rv = raggio raccordo verticale [m] alim = 0,6 m/s2
c) che venga garantita la visuale libera, intesa come la lunghezza del tratto di strada che il conducente riesce a vedere davanti a sé, senza considerare l’influenza del traffico, delle condizioni atmosferiche e di illuminazione della strada.
-distanze di visibilità:
Lungo il tracciato stradale la distanza di visuale libera deve essere confrontata, in fase di progettazione, con le seguenti distanze:
a) distanza di visibilità per l’arresto, che è pari allo spazio minimo necessario perché un conducente possa arrestare il veicolo in condizioni di sicurezza davanti ad un ostacolo imprevisto.
b) distanza di visibilità per il sorpasso, che è pari alla lunghezza del tratto di strada occorrente per compiere una manovra di completo sorpasso in sicurezza, quando non si possa escludere l’arrivo di un veicolo in senso opposto.
c) distanza di visibilità per la manovra di cambiamento di corsia, che è pari alla lunghezza del tratto di strada occorrente per il passaggio da una corsia a quella ad essa adiacente nella manovra di deviazione in corrispondenza di punti singolari (intersezioni, uscite, ecc.).
a) Distanza di visibilità per l’arresto:
La si valuta con la seguente espressione:
( )
( )
( )
∫
+ + ± × − × = + = 1 0 0 1 2 0 2 1 100 6 . 3 1 6 . 3 V V dV V r m V Ra i V f g V V D D D τ [m] dove,D1 = spazio percorso nel tempo τ [m] D2 = spazio di frenatura [m]
V0 = velocità del veicolo all’inizio della frenatura, pari alla velocità di progetto desunta puntualmente dal diagramma delle velocità [Km/h]
V1 = velocità finale del veicolo, in cui V1=0 in caso di arresto [Km/h] i = pendenza longitudinale del tracciato [%]
τ = tempo complessivo di reazione (percezione, riflessione, reazione e attuazione) [s]
g = accelerazione di gravità [m/s2] Ra = resistenza aerodinamica [N] m = massa del veicolo [kg]
fl = quota limite del coefficiente di aderenza impegnabile longitudinalmente per la frenatura
r0 = resistenza unitaria al rotolamento, trascurabile [N/kg]
La resistenza aerodinamica si valuta con la seguente espressione:
2 2 6 , 3 2 1 V S C Ra ⋅ ⋅ x⋅ ⋅ × = ρ dove,
Cx = coefficiente aerodinamico S = superficie resistente [m2]
ρ = massa volumica dell’aria in condizioni standard [kg/m2]
Per il coefficiente fl si adottano i valori che si trovano nella tabella di Fig.9 che si diversifica a seconda che si utilizzi per le autostrade o per gli altri tipi di strade.
Tali valori sono compatibili anche con superficie stradale leggermente bagnata (spessore del velo idrico di 0,5 mm ).
Fig. 9: Coefficiente fl
La normativa fornisce anche dei diagrammi dai quali possiamo conoscere il valore del coefficiente fl anche per valori intermedi delle velocità.
Fig. 10
Per il tempo complessivo di reazione si assumono valori linearmente decrescenti con la velocità da 2,6 s per 20 km/h, a 1,4 s per 140 km/h, in considerazione dell’ attenzione più concentrata alle alte velocità.
(
− ⋅V)
= 2,8 0,01
τ [s] con V in km/h
In situazioni particolari quali incroci o tratti di difficile lettura ed interpretazione (intersezioni complesse, innesti o deviazioni successive ecc.) il tempo di cui sopra va maggiorato di 1 secondo nel caso di strada extraurbana e fino a 3 secondi in ambito urbano.
La normativa fornisce grafici in cui sono riportate direttamente le distanze di visibilità per l’arresto calcolate con le formule sopra, in funzione di una pendenza longitudinale costante, sia per le autostrade che per le altre strade. In caso di variabilità di tale pendenza (raccordi verticali), si può assumere per essa il valore medio.
A noi interessa il secondo grafico che riporta la normativa relativo alle atre strade.
Il diagramma di Fig. 11 è stato calcolato per il caso di arresto di un’autovettura le cui caratteristiche di resistenza aerodinamica (con riferimento ad un’autovettura media) sono precisate di seguito:
Cx = coefficiente aerodinamico = 0,35 S = superficie resistente = 2,1 [m2]
ρ = massa volumica dell’aria in condizioni standard = 1,15 [kg/m2] m = massa del veicolo = 1250 [kg]
b) Distanza di visibilità per il sorpasso:
In presenza di veicoli marcianti in senso opposto la distanza di visibilità completa per il sorpasso si valuta con la seguente espressione:
V v
Ds=20× =5,5×
dove,
v (m/s) oppure V (km/h) è la velocità di progetto desunta puntualmente dal diagramma delle velocità ed attribuita uguale sia per il veicolo sorpassante che per il veicolo proveniente dal senso opposto.
c) Distanza di visibilità per la manovra di cambiamento di corsia:
Si valuta lo spazio necessari con la seguente espressione, nella quale i 9,5 secondi comprendono i tempi necessari per percepire e riconoscere la situazione e per la decisione ed effettuazione della manovra di cambiamento di una sola corsia (4 secondi).
V v
Dc=9,5× =2,6×
dove,
v (m/s) oppure V (km/h) è la velocità di progetto desunta puntualmente dal diagramma delle velocità.
-raccordi convessi (dossi):
A seconda che la distanza D, di visuale libera scelta, sia maggiore o minore dello sviluppo L del raccordo si distinguono due casi:
Caso 1 D<L ) 2 ( 2 1 2 1 2 2 h h h h D Rv ⋅ ⋅ + + ⋅ = Caso 2 D>L ∆ ⋅ × + + ⋅ − ⋅ ∆ ⋅ = i h h h h D i Rv 2 100 100 1 2 2 1 2
di norma si utilizzano i seguenti valori, h1 = altezza conducente pari a 1,10 m
h2 = altezza di un ostacolo fisso a terra pari a 0,10 m D = Da = distanza per l’arresto
Il D.M. oltre alle formule precedentemente elencate consente l’utilizzo del diagramma di Fig. 12 in cui è dato Rv in finzione di Da e ∆i.
-raccordi concavi (sacche):
Nel caso di raccordi concavi, in condizioni di luce diurna, non sussiste nessun genere di problema per quanto riguarda le distanze di visibilità per l’arresto e per il sorpasso.
In condizioni notturne invece il discorso è diverso in quanto si rende necessario garantire che i fari riescano ad illuminare fino ad una distanza pari a quella di arresto.
Anche per i raccordi concavi, come per i convessi, si distinguono due casi: Caso 1: D<L ) sin ( 2 2 θ + ⋅ = h D Rv Caso 2: D>L
(
)
⋅ + ⋅ ∆ − ⋅ ∆ ⋅ = 2 100 100 h D sinθ i D i Rv dove,h = altezza del centro dei fari del veicolo dal piano stradale pari a 0,50 m θ = massima divergenza verso l’alto del fascio luminoso rispetto l’asse del veicolo
Il D.M. oltre alle formule precedentemente elencate consente l’utilizzo del diagramma di Fig. 13 in cui è dato Rv in funzione di Da e ∆i.
2.5 Verifiche andamenti altimetrici
Lungo il tracciato del sottopasso sono stati inseriti quattro raccordi verticali che sono stati numerati in modo crescente, da Sud verso Nord.
-raccordo verticale 1 (sacca)
500 =
v
R raggio cerchio oscuratore nel centro della parabola [m]
% 6
1 =
i pendenza prima livelletta
% 0
2 =
i pendenza seconda livelletta
% 6 =
∆i variazione di pendenza delle livellette da raccordare
30 100 = ∆ ⋅ = i v R
L sviluppo delraccordo verticale [m]
001 . 0 2 1 = ⋅ = v R
a parametro a dell’equazione della parabola inserita tra le due livellette
06 . 0 100 1 = = i
b parametro b dell’equazione della parabola inserita tra le due livellette 2 x a x b y= ⋅ − ⋅ equazione parabola
Dal grafico di Fig. 11 considerando una velocità pari a 40 km/h che è il limite inferiore della velocità di progetto:
Da=50 m distanza di visibilità per l’arresto
X Y X=0 0 0 X=L/4 7.5 0.393 X=L/2 15 0.675 X=3L/4 22.5 0.843 X=L 30 0.9
Dal grafico di Fig. 13 ricavo il raggio oscuratore minimo consentito: Rmin=400 m
Rv≥ Rmin verificato
-raccordo verticale 2 (dosso)
500 =
v
R raggio cerchio oscuratore nel centro della parabola [m]
% 6
1 =
i pendenza prima livelletta
% 0
2 =
i pendenza seconda livelletta
% 6 =
∆i variazione di pendenza delle livellette da raccordare
30 100 = ∆ ⋅ = i v R
L sviluppo delraccordo verticale [m]
001 . 0 2 1 = ⋅ = v R
a parametro a dell’equazione della parabola inserita tra le due livellette
06 . 0 100 1 = = i
b parametro b dell’equazione della parabola inserita tra le due livellette 2 x a x b y= ⋅ − ⋅ equazione parabola
Dal grafico di Fig. 11 considerando una velocità pari a 40 km/h: Da=40 m distanza di visibilità per l’arresto
X Y X=0 0 0 X=L/4 7.5 0.393 X=L/2 15 0.675 X=3L/4 22.5 0.843 X=L 30 0.9
Dal grafico di Fig. 12 ricavo il raggio oscuratore minimo consentito: Rmin=500 m
Rv≥ Rmin verificato
-raccordo verticale 3 (dosso)
600 =
v
R raggio cerchio oscuratore nel centro della parabola [m]
% 6
1 =
i pendenza prima livelletta
% 0
2 =
i pendenza seconda livelletta
% 6 =
∆i variazione di pendenza delle livellette da raccordare
36 100 = ∆ ⋅ = i v R
L sviluppo delraccordo verticale [m]
000833 . 0 2 1 = ⋅ = v R
a parametro a dell’equazione della parabola inserita tra le due livellette
06 . 0 100 1 = = i
b parametro b dell’equazione della parabola inserita tra le due livellette 2 x a x b y= ⋅ − ⋅ equazione parabola
Dal grafico di Fig. 11 considerando una velocità pari a 40 km/h: Da=40 m distanza di visibilità per l’arresto
X Y X=0 0 0 X=L/4 9 0.515 X=L/2 18 0.855 X=3L/4 27 1.049 X=L 36 1.071
Dal grafico di Fig. 12 ricavo il raggio oscuratore minimo consentito: Rmin=500 m
Rv≥ Rmin verificato
-raccordo verticale 4 (sacca)
600 =
v
R raggio cerchio oscuratore nel centro della parabola [m]
% 6
1 =
i pendenza prima livelletta
% 0
2 =
i pendenza seconda livelletta
% 6 =
∆i variazione di pendenza delle livellette da raccordare
36 100 = ∆ ⋅ = i v R
L sviluppo delraccordo verticale [m]
000833 . 0 2 1 = ⋅ = v R
a parametro a dell’equazione della parabola inserita tra le due livellette
06 . 0 100 1 = = i
b parametro b dell’equazione della parabola inserita tra le due livellette 2 x a x b y= ⋅ − ⋅ equazione parabola
Dal grafico di Fig. 11 considerando una velocità pari a 40 km/h: Da=40 m distanza di visibilità per l’arresto
X Y X=0 0 0 X=L/4 9 0.515 X=L/2 18 0.855 X=3L/4 27 1.049 X=L 36 1.071
Dal grafico di Fig. 12 ricavo il raggio oscuratore minimo consentito:
Rmin=500 m Rv≥ Rmin verificato
-raccordo verticale 5 (sacca)
600 =
v
R raggio cerchio oscuratore nel centro della parabola [m]
% 518 . 6
1 =
i pendenza prima livelletta
% 0
2 =
i pendenza seconda livelletta
% 518 . 6 =
∆i variazione di pendenza delle livellette da raccordare
108 . 39 100 = ∆ ⋅ = i v R
L sviluppo delraccordo verticale [m]
000833 . 0 2 1 = ⋅ = v R
a parametro a dell’equazione della parabola inserita tra le due livellette
065 . 0 100 1 = = i
b parametro b dell’equazione della parabola inserita tra le due livellette 2 x a x b y= ⋅ − ⋅ equazione parabola
Dal grafico di Fig. 11 considerando una velocità pari a 40 km/h: Da=40 m distanza di visibilità per l’arresto
X Y X=0 0 0 X=L/4 9.777 0.558 X=L/2 19.554 0.956 X=3L/4 29.331 1.195 X=L 39.108 1.275
Dal grafico di Fig. 12 ricavo il raggio oscuratore minimo consentito: Rmin=500 m
Rv≥ Rmin verificato
La visibilità per l’arresto è verificata per tutti e quattro i raccordi, non è verificata invece la visibilità per il sorpasso essendo:
Ds = 220 m
Quindi il raggio minimo, dai grafici di Fig. 12 e Fig. 13, risulta essere rispettivamente di 13000 e 5500 metri.
2.6 Intersezioni
L’inserimento del sottopasso, nel tracciato stradale già esistente del paese di Altopascio, ha comportato dei problemi per le intersezioni stradali che si sono venute a creare.
Nel caso della Soluzione 1 sono tre i punti in cui è stato necessario studiare una soluzione:
1. sulla via Bientinese 2. sulla via dei Barcaioli
3. sulla via Romea all’angolo con via Torino
Intersezione 1
Delle tre, sicuramente la prima intersezione è quella più importante in quanto si va ad inserire sulla via Bientinese strada extraurbana di una certa importanza.
La soluzione che si è pensato di utilizzare è stata l’inserimento di una rotatoria.
In ottemperanza con le “Norme funzionali e geometriche per la
costruzione delle intersezioni stradali” possiamo suddividere le intersezioni a
rotatoria in tre tipologie fondamentali:
a) rotatorie convenzionali con diametro esterno compreso tra 40 e 50 metri b) rotatorie compatte con diametro esterno compreso tra 25 e 40 metri c) mini rotatorie con diametro esterno compreso tra 14 e 25 metri
Un ulteriore elemento distintivo tra le tipologie fondamentali di rotatoria è rappresentato dalla sistemazione dell’isola circolare centrale.
Nel caso di mini rotatorie con diametro esterno compreso tra 25 e 18 metri l’isola circolare centrale che può essere resa transitabile solo in parte per le manovre dei veicoli pesanti, diventa completamente transitabile per le rotatorie con diametro compreso tra 18 e 14 metri.
Le rotatorie compatte sono invece caratterizzate da bordure non sormontabili dell’isola centrale.
Fig. 15 : Rotatoria tipo
Con riferimento alla Fig. 15 nella tabella di Fig. 16 vengono definite le larghezze degli elementi modulari delle rotatorie.
Elemento modulare Diametro esterno della rotatoria [m]
Larghezza Corsia [m]
≥ 40 6,00
Compreso tra 25 e 40 7,00 Corsie virtuali di scambio nella corona rotatoria,
per ingressi ad una corsia (*)
Compreso tra 14 e 25 8,00
≥ 40 9,00
Corsie virtuali di scambio nella corona rotatoria,
per ingressi a più corsie (*) <40 8,50-9,00
Bracci d’ingresso (**) <25 4,00
Bracci d’uscita (*) ≥ 25 4,50
(*) deve essere organizzata sempre su una sola corsia (**)organizzati al massimo con due corsie
Fig. 16
Nel nostro caso, per decidere il diametro esterno della rotatoria, abbiamo dovuto trovare un compromesso tra lo scarso spazio a disposizione e la necessità che la rotatoria potesse essere fruibile anche dai mezzi pesanti che passano dal centro di Altopascio.
Le dimensioni caratteristiche della rotatoria sono: De=40 m diametro esterno
Cr=7 m corona rotatoria
Li=6 m larghezza bracci d’ingresso a due corsie Lu=4,5 m larghezza bracci d’uscita
Come è possibile vedere dalla Fig. 16 riportata dalle “Norme funzionali e
geometriche per la costruzione delle intersezioni stradali” tutte le dimensioni
caratteristiche della rotatoria sono state rispettate.
Nella realizzazione di questa intersezione inoltre è stato necessario studiare il modo di poter garantire l’accesso alle tre case di Fig. 17, infatti come
possiamo vedere nella fotografia, allo stato attuale tale accesso è direttamente sulla via Bientinese.
Fig. 17
Si è pensato di realizzare un accesso a senso unico nel piazzale che si è venuto a creare davanti alle case stesse, con una deviazione sulla rotatoria tra i due bracci che la collegano con la via Bientinese.
Il piazzale ha una larghezza di 6 metri nel tratto più stretto in modo da poter garantire la manovra agli eventuali mezzi di soccorso quali autoambulanze o camion dei vigili del fuoco.
Per ritornare sulla viabilità principale, è stato realizzata un’ uscita sulla via Bientinese lato sud, in modo che andando a reinserirsi sulla rotatoria, stessa fosse possibile andare in qualsiasi direzioni evitando manovre pericolose.
Inoltre con la realizzazione di due grosse aiuole, i cancelli delle abitazioni di Fig. 17 retrocedono di oltre 10 metri rispetto al ciglio della strada, con sensibile riduzione dei rumori e dell’inquinamento e conseguente miglioramento della qualità della vita.
Intersezione 2
Il problema principale che si è venuto a creare con la realizzazione del sottopasso è stato quello di dover garantire l’accesso al panificio industriale “Buralli” in quanto il tracciato va a tagliare in due via dei Barcaioli.
Fig. 18 Intersezione con via dei Barcaioli
Essendo il sottopasso in trincea nel punto in cui si incrocia con la via esistente, non è stato possibile realizzare un’intersezione a raso e così dal lato est si è interrotta la strada che serve solamente come accesso per le abitazioni e le fabbriche che si affacciano sulla medesima per coloro che vengono dal centro del paese.
Per il lato ovest, non essendoci altre possibilità di accesso per quel tratto di strada, si è realizzato un accesso dal tracciato del sottopasso su via dei Barcaioli con una pendenza del 7% in modo da rispettare le normative.
Intersezione 3
Per quanto riguarda l’ultima intersezione essendo via Torino una strada di secondaria importanza e non avendo differenze altimetriche abbiamo realizzato un’intersezione a raso con precedenza per gli autoveicoli che escono dal sottopasso e si immettono sulla via Francesca Romea.
Fig. 19 Intersezione con via Torino
2.7 Ulteriori infrastrutture viarie
La realizzazione del nuovo tracciato ferroviario e nello stesso tempo quella del sottopasso isola dalla rete stradale esistente la villetta di Fig. 20 che si trova, a sud bloccata dall’autostrada A11 Firenze-Mare, a nord dalla linea ferroviaria Pistoia-Lucca ed ad est dal sottopasso.
Non essendo una casa da demolire si è dovuto garantirle l’accesso e quindi si è studiata la realizzazione di una piccola strada larga 2,5 metri che costeggiando il tracciato autostradale, arriva sulla via Francesca Romea passando sopra il tracciato del sottopasso in quanto nel punto in cui si incontrano le due strade c’è una differenza di quota di oltre 6,5 metri che consente di rispettare la normativa per quanto riguarda le altezze minime garantite dal piano stradale di 5 metri.
Fig. 20 Villetta isolata
Questa differenza di quota è stata ottenuta andando a realizzare una rampa con una pendenza del 5,5% uscente dal giardino della villetta.
2.8 Sottopasso ciclabile e pedonale
La realizzazione del sottopasso risolve solamente il problema si coloro che utilizzano autoveicoli o motocicli, in quanto il tracciato che abbiamo realizzato non è praticabile dai ciclisti né tanto meno dai pedoni, a causa dell’eccessiva lunghezza e ripidezza.
L’obiettivo della tesi è stato quello di dare una continuità al paese di Altopascio nel punto esatto in cui questo veniva diviso in due.
La soluzione quindi è stata quella di andare a realizzare, in prossimità dell’intersezione della linea ferroviaria Pistoia-Lucca con la via Francesca Romea due sottopassi: uno esclusivamente pedonale con accesso anche per i portatori di handicap, l’altro invece ciclabile (Fig. 21).
Il tracciato del sottopasso ciclabile parte da via Torino e segue l’andamento del tracciato ferroviario arrivando fino ad una profondità necessaria per poter attraversare la ferrovia stessa.
Dopo di che ricomincia a salire fino a ritornare in superficie in prossimità dell’uscita del sottopasso pedonale.
In questa zona verranno realizzati dei giardinetti in modo da garantire uno spazio verde alla città.
Il sottopasso ciclabile ha una pendenza massima del 7,16% nel tratto a nord, per una lunghezza di circa 120 metri e passa sotto la ferrovia ad una profondità di 4 metri.
Considerando un’impalcato di 1,5 metri, l’altezza minima garantita è di 2,5 metri sufficiente per un’infrastruttura di questo tipo.
Poiché l’attraversamento pedonale deve garantire il superamento della ferrovia sia ai pedoni che ai portatori di handicap, abbiamo realizzato la messa in opera di due ascensori capaci di contenere le carrozzine dei disabili.
Anche in questo caso si ha un’altezza del sottopasso di 2,5 metri per uno sviluppo in lunghezza di circa 17 metri e un dislivello dal piano di campagne di 4 metri. Si è considerata una superficie di ingombro di 2,5x2,5 per andare ad inserire l’ascensore per portatori di handicap con il relativo locale tecnico.
Le scale invece hanno una pedata di 34 cm e un’alzata di 15 cm e sono in numero tale da superare a nord un dislivello di 3,90 metri e a sud di 3,53 metri. La larghezza delle scale è di 1,5 metri e quella del corridoio sotterraneo di 2 metri.
Tutte queste misure sono state scelte in modo da rispettare la normativa vigente per quanto riguarda le dimensioni delle scale pubbliche e gli accessi per portatori di handicap.