Parte II
Con il Progetto SCAUT si intende studiare una configurazione di UAV certi-ficabile che possa garantire la massima protezione possibile ai terzi sorvolati. Nella prima parte della tesi, tenendo conto delle disposizioni attuali, si sono individuate le JAR-VLA come normative di riferimento per un UAV con le caratteristiche dello SCAUT.
Tali normative richiedono per i guasti Catastrofici una probabilit`a di occor-renza < 10−5 per ora di volo.
Il progresso tecnologico potrebbe contribuire alla riduzione della probabilit`a di guasto Catastrofico per ora di volo, permettendo di assicurare ai terzi sor-volati lo stesso livello di protezione che, nell’aviazione convenzionale, viene garantito ai passeggeri dei grandi velivoli da trasporto.
La miniaturizzazione dei sistemi ed i loro costi potrebbero consentire la si-stemazione sul velivolo di ridondanze dei sistemi cos`ı da ottenere probabilit`a di guasto Catastrofico < 10−9 anche per UAV che per dimensioni, peso e prestazioni rientrerebbero in classi con livelli di sicurezza richiesti inferiori. In questa seconda parte della tesi viene ripreso il progetto di UAV emerso da precedenti studi del progetto SCAUT per verificare che sia compatibile con le attuali richieste.
Dopo la presentazione dell’architettura del velivolo (Cap.5), nel Cap.6 si ri-porta una possibile disposizione dei sottosistemi di bordo all’interno della fusoliera con le opportune ridondanze per quelli ritenuti pi`u critici dal punto di vista della sicurezza.
Infine per due apparati di bordo, quello propulsivo (compreso il sistema di alimentazione del carburante) e quello di generazione e distribuzione del-la potenza a bordo, si effettua una Analisi del rischio funzionale (Functio-nal Hazard Assessment -FHA-) per classificare le conseguenze delle possibili avarie ed una Analisi dell’albero dei guasti (Fault Tree Analysis -FTA-) per determinare il livello di rischio di tali avarie.
5
Schema funzionale dello SCAUT
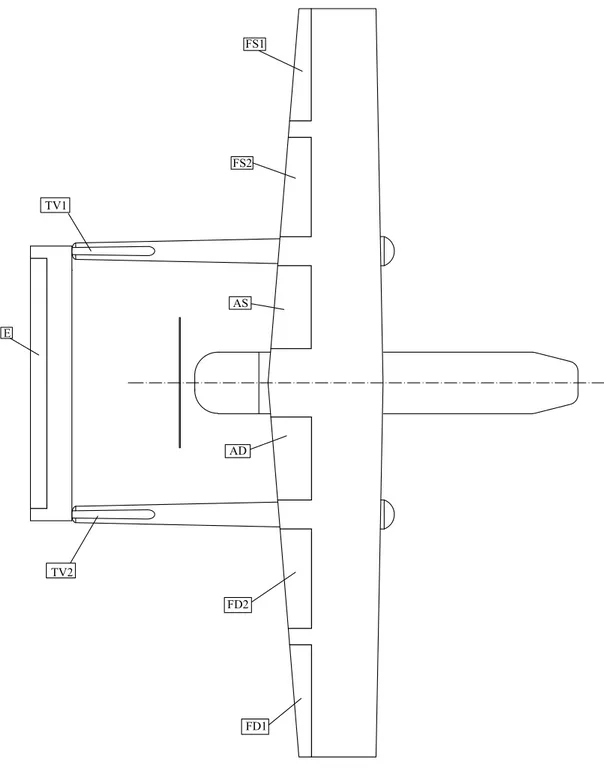
L’UAV SCAUT `e un monoplano ad ala alta con superfici di coda sostenute da due travature vincolate all’ala.
Il motore `e posizionato nella parte posteriore della fusoliera dunque il velivolo `
e caratterizzato da elica spingente.
La Fig.5.1 riporta uno schema semplificato dell’architettura del Sistema da cui poter individuare le superfici mobili della configurazione:
- 2 timoni verticali - 1 equilibratore
- 3 superfici mobili per semiala
La presenza di 6 superfici mobili in ala consente di mantenere il controllo del velivolo sul piano latero-direzionale anche in presenza di 2 avarie sulla stessa semiala. La terza avaria su una stessa semiala risulta critica per il controllo del volo.
5 – Schema funzionale dello SCAUT
6
I sottosistemi che costituiscono un
UAV
La definizione di UAV presente in [1] mette in evidenza alcune importanti caratteristiche di questi nuovi Sistemi. Si legge: “Un Sistema UAV com-prende elementi che consistono nel velivolo (UAV), la stazione di controllo ed ogni altro elemento del Sistema necessario a consentire il volo (comprese operazioni di taxiing, decollo e recupero/lancio), per esempio il sistema di trasmissione dei dati (data link ) e gli equipaggiamenti per il lancio ed il re-cupero del velivolo”.
Risulta dunque che nel progettare un UAV `e necessario uno studio del Siste-ma nel suo complesso non confinato solamente al velivolo.
Gli equipaggiamenti lontani dal velivolo, per esempio molti di quelli presenti nella stazione di controllo, che svolgono per l’UAV le stesse funzioni che ne-gli aerei con pilota a bordo vengono assolte da apparecchi di bordo, devono essere certificati come parte dell’UAV.
Riferendosi alla stazione di controllo come elemento dell’UAV, nell’articolo 3 dell’EASA Regulation EC1592/2002 si trova che essa, pur essendo un ele-mento del Sistema UAV, potrebbe essere compresa nella certificazione del velivolo oppure potrebbe essere considerata come un ‘prodotto’ a s´e stante e quindi necessitare di una propria regolamentazione provvedendo ad una integrazione sicura con il velivolo.
L’idea di una certificazione propria per la stazione di controllo ben si pre-sta all’opportunit`a di avere un’unica stazione in grado di gestire pi`u velivoli UAV, cosa che altrimenti porterebbe a dover avere una stazione di controllo
6 – I sottosistemi che costituiscono un UAV
compresa in pi`u certificati di aeronavigabilit`a.
Gli elementi per il lancio ed il recupero del velivolo sono congegni ed apparec-chiature con cui il velivolo `e controllato durante il lancio e/o il recupero, essi devono essere certificati come parte dell’UAV ed inclusi nella progettazione perch´e considerati critici per la sicurezza.
Per alcuni tipi di operazioni non `e possibile decollare ed atterrare dagli ae-roporti e le condizioni di lancio da catapulta ed atterraggio con paracadute sono le sole praticabili.
In [1] si richiede che il lancio ed il recupero del velivolo in condizioni non con-venzionali avvengano in opportuni siti liberi da persone e propriet`a (§4.3.1) ma, proprio perch´e ci`o non `e sempre possibile, si ritiene necessaria la certifi-cazione degli equipaggiamenti che si utilizzano come garanzia per la sicurezza di terzi. I successivi paragrafi individuano i sottosistemi che fanno parte del Sistema UAV distinti tra quelli propri del veicolo e quelli della stazione di controllo.
6.1
Architettura del velivolo UAV
Il velivolo senza pilota a bordo deve essere in grado di volare sia in automatico su punti di riferimento stabiliti nel piano di volo (waypoints) sia comandato dal pilota dalla stazione di controllo, deve quindi possedere sistemi per la guida automatica e per la comunicazione.
Il velivolo deve essere in grado di volare all’interno di spazi aerei nazionali ed internazionali senza rappresentare minaccia per altri in volo e per terzi a terra ed a questo scopo in [1] viene richiesta la presenza a bordo di opportuni sistemi.
I sistemi individuati per il velivolo sono stati distinti tra : 1. sistemi necessari per effettuare la missione,
2. sistemi necessari per soddisfare richieste regolamentari, 3. sistemi richiesti dalla tipologia della missione.
6 – I sottosistemi che costituiscono un UAV
• Flight Management System
che `e rappresentato dal calcolatore di bordo e dal relativo software, gestisce:
– il sistema autopilota
– il sistema di gestione del volo
– il controllo del volo mediante un sistema di comandi di volo – il sistema di emergenza attivando le Procedure di emergenza
o il FTS a seconda della gravit`a di guasto registrata inoltre il FMS riceve informazioni che gli arrivano da:
– Air Data System – Sistema di navigazione
∗ Global Positioning System (GPS) ∗ piattaforma inerziale
– Stazione di Controllo a terra ed ATM mediante il sistema di telecomunicazione.
• Sistema propulsivo – motore
– sistema di alimentazione del carburante
• Sistema elettrico di generazione e distribuzione della potenza a bordo
• Sistema di telecomunicazione – data link
– video link
• Sistema per il pilotaggio a vista.
2. Sistemi necessari per soddisfare richieste regolamentari
sono quei sistemi necessari all’UAV per soddisfare requisiti di sicurezza • Flight Termination System
• Procedure di emergenza
• Sistema di controllo della potenza del motore • Traffic Collision Avoidance System (TCAS)
6 – I sottosistemi che costituiscono un UAV
• Transponder
• Sistema luci di posizione ed anticollisione • Equipaggiamento per il lancio ed il recupero
– carrello – catapulta – paracadute.
3. Sistemi richiesti dalla tipologia della missione • Sistema di condizionamento del vano di carico • Storm scope.
6.2
Architettura della Ground Control Station
(GCS)
Nel caso della stazione a terra i sistemi sono stati distinti tra: 1. sistemi per il controllo dell’UAV,
2. sistemi per il controllo della missione,
3. sistemi necessari per soddisfare richieste regolamentari. 1. Sistemi per il controllo dell’UAV
• Sistema per il pilotaggio a vista • Sistema strumenti di volo:
– indicatore di prua – indicatore di velocit`a – altimetro
– indicatore di velocit`a verticale – orizzonte artificiale
– indicatore di virata – bussola magnetica
6 – I sottosistemi che costituiscono un UAV
– Strumentazione per il controllo del motore che serve a con-trollare:
∗ quantit`a di carburante in ogni serbatoio ∗ pressione dell’olio
∗ temperatura dell’olio
∗ indicatore del numero di giri ∗ pressione del carburante • Sistema strumenti di navigazione • Sistemi comandi di volo
2. Sistemi per il controllo della missione • Sistema di telecomunicazioni:
– video link – data link
• Sistema di ricezione ed elaborazione dati – monitor
– sistemi di calcolo
3. Sistemi necessari per soddisfare richieste regolamentari • apparati di radiotrasmissione
• sistema di comunicazione tra GCS ed ATC
• sistema di comunicazione tra GCS e altri utilizzatori dello spazio aereo
• indicatori di malfunzionamento sistemi a bordo • sistema di attivazione del FTS.
6.3
Disposizione dei sistemi di bordo sull’UAV
SCAUT
La fusoliera dell’UAV SCAUT ha una sezione trasversale trapezoidale isoscele con la base minore rivolta verso il basso e raccordata in corrispondenza degli
6 – I sottosistemi che costituiscono un UAV
spigoli.
La fusoliera pu`o essere suddivisa in tre parti, anteriore, centrale e posteriore. I sistemi di bordo individuati nel § 6.1 si posizionano tra la parte centrale e quella anteriore.
La Fig.6.1 riporta la sezione della fusoliera nella parte centrale.
Figura 6.1: Sezione della fusoliera
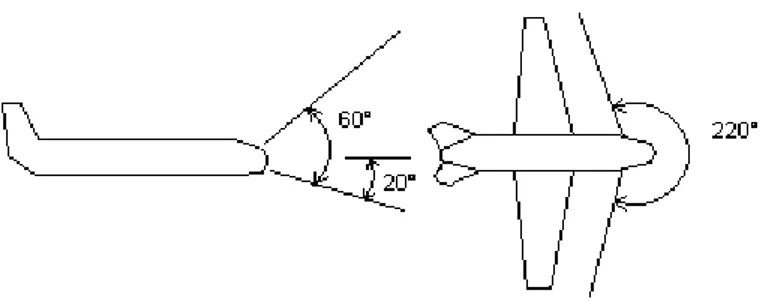
La parte anteriore della fusoliera ha una forma caratteristica dovuta al fatto che in essa devono essere alloggiate le tre telecamere necessarie per la fase di pilotaggio a vista.
Le telecamere sono posizionate tra loro ad un angolo di 75◦ed il campo visivo complessivo `e rappresentato nella seguente figura:
Figura 6.2: Campo visivo delle telecamere
La parte posteriore della fusoliera `e quella in cui deve essere alloggiato il motore.
6 – I sottosistemi che costituiscono un UAV
per gli attacchi alla struttura e la presa d’aria.
L’Appendice A riporta i dati relativi a pesi ed ingombri dei sistemi scelti secondo quanto riportato in [2] e [8] sulla base di sistemi esistenti per velivoli convenzionali.
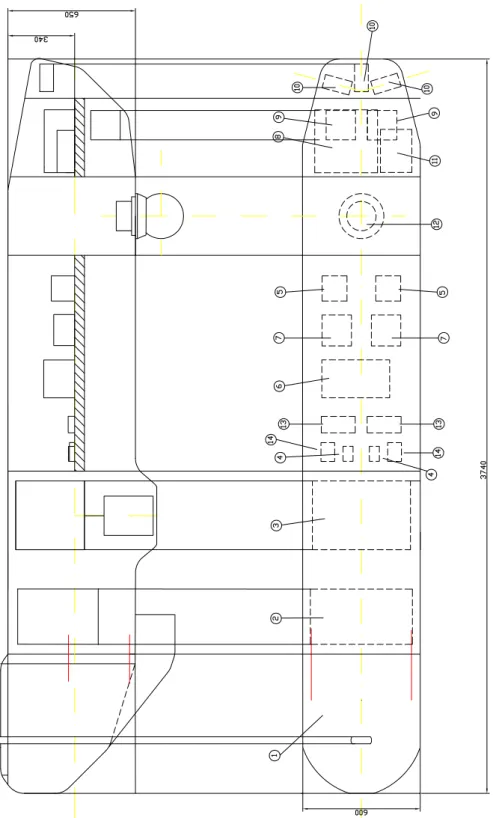
Tenendo conto di questi dati e dell’architettura del velivolo come emersa da studi precedenti, in Fig.6.3 `e riportata una possibile disposizione dei si-stemi di bordo all’interno della fusoliera dell’UAV considerando opportune ridondanze per i sistemi la cui avaria potrebbe pregiudicare lo svolgimento in sicurezza del volo.
Per poter alloggiare detti sistemi si sono modificate le dimensioni della se-zione della fusoliera portando l’altezza dagli originali 550 mm a 650 mm. In precedenti studi, per ciascun sistema di bordo, `e stata fornita un’indi-cazione circa la ridondanza necessaria ad assicurare un adeguato livello di sicurezza in funzione della gravit`a di una corrispondente avaria.
All’epoca le proposte di regolamentazione assegnavano probabilit`a per ora di volo di 10−9 per i sistemi pi`u critici e tra 10−5 e 10−6 per quelli la cui avaria non si riteneva che avesse conseguenze catastrofiche. Poich´e questa valutazione si ritiene ancora soddisfacente si sono mantenute le ridondanze individuate in precedenza verificando la loro possibile disposizione a bordo.
6 – I sottosistemi che costituiscono un UAV
6 – I sottosistemi che costituiscono un UAV
La seguente Tabella riporta i componenti indicati in Fig.6.3 con il numero di esemplari sul velivolo ed il peso totale.
Rif. Componenti Esemplari a bordo Peso totale
1 Motore 1 80 Kg
2 Paracadute 1 25 Kg
3 Serbatoio 1
4 Trasmettitore (Data/Video link) 2 20 ˙Kg
5 INS 2 4.8 Kg 7 Air Data 2 4.08 Kg 8 FMS 1 (4 computer) 8.8 Kg 9 Batteria 2 15 Kg 10 Videocamera 3 3 Kg 11 Transponder 2 2.36 Kg 12 Carico utile 1 50 Kg 13 GPS 2 1.8 Kg
14 Ricevitore (Data/Video link) 2 10 Kg
La stima dei pesi per l’UAV SCAUT in tale configurazione `e la seguente:
Sistemi di bordo 92.94 Kg Paracadute 25 Kg Motore+elica+telaio 80 Kg Carico utile 50 Kg Struttura 90 Kg Carburante 70 Kg
7
Analisi dei livelli di sicurezza
In questo capitolo sono descritte le Functional Hazard Assessment (FHA) e Fault Tree Analysis (FTA) utilizzate per determinare e verificare i livelli di sicurezza dei sottosistemi di un UAV, in analogia a quanto richiesto nel para-grafo “1309” dei codici di requisiti di aeronavigabilit`a per aerei convenzionali da trasporto civile.
I capitoli successivi riportano esempi di applicazione di queste analisi ai sot-tosistemi propulsivo ed elettrico con lo schema funzionale di ciascuno e la descrizione del loro funzionamento.
7.1
Functional Hazard Assessment(FHA)
La Functional Hazard Assessment `e un’analisi che viene eseguita nel cam-po dell’aviazione civile convenzionale, come ricam-portato nella normativa SAE-ARP4761 [9], all’inizio del ciclo di sviluppo di un aereo o di un suo sistema, con lo scopo di identificare chiaramente ogni possibile condizione di guasto e di classificare gli effetti prodotti da tale condizione.
Per rendere pi`u chiara ed immediata la lettura dei risultati di questo tipo di analisi viene riportato tutto in tabelle simili alla Tab. 7.1.
Rif. Funzione Fase di volo Condizioni
di guasto
Effetti del guasto
Classificazione
7 – Analisi dei livelli di sicurezza
Questa analisi pu`o in generale essere eseguita a due livelli: 1. a livello velivolo (nel caso degli UAV a livello Sistema),
2. a livello di sistema (nel caso degli UAV a livello sottosistema). I passi logici da seguire nei due livelli di analisi sono analoghi.
In particolare quando si effettua l’analisi per un determinato sottosistema occorre:
1. Individuare le funzioni principali del sottosistema in esame (funzioni di base).
2. Individuare tutte le possibili condizioni di guasto del sottosistema. 3. Determinare gli effetti delle condizioni di guasto individuate che
pos-sono essere diversi a seconda della fase di volo (decollo, volo, atterrag-gio), dell’integrit`a di sottosistemi correlati ed in alcuni casi anche delle condizioni atmosferiche.
4. Classificare gli effetti determinati. Nel caso degli UAV la classificazione deve tenere presente le implicazioni sulla sicurezza di terzi sorvolati e propriet`a come riportato al § 4.3.1.
7.2
Fault Tree Analysis(FTA)
La Fault Tree Analysis `e un metodo grafico di identificazione della relazione logica tra la condizione di guasto considerata e gli eventi che l’hanno provo-cata.
L’organizzazione di un’analisi di questo tipo `e la seguente :
1. Si identifica un “evento indesiderato” che diventa il “top-event” dell’al-bero dei guasti (per un sottosistema il “top-event” pu`o essere ricavato direttamente dalle condizioni di guasto individuate nella FHA). Si dichiara la probabilit`a di occorrenza di guasto del “top-event” che si intende raggiungere.
2. Si raccolgono informazioni circa le combinazioni di eventi che portano al verificarsi del “top-event”.
7 – Analisi dei livelli di sicurezza
3. Si costruisce l’albero dei guasti progredendo verso parti in cui l’analisi `
e sempre pi`u approfondita determinando i guasti e le loro combinazioni necessarie e sufficienti a causare il “top-event”.
Tali guasti devono essere interconnessi con opportuni simboli logici e sviluppati successivamente attraverso sempre pi`u dettagliati livelli di studio.
4. Si determinano le probabilit`a di guasto di ciascun evento di base del-l’albero e si opera matematicamente per ottenere la probabilit`a di occorrenza del “top-event”.
5. Si verifica infine che il sottosistema analizzato risulti conforme agli obiettivi di sicurezza richiesti dai codici in base alla probabilit`a di guasto ottenuta.
Il risultato di questa analisi pu`o portare a modifiche progettuali del sotto-sistema qualora si verifichi che il progetto iniziale non soddisfa i requisiti di sicurezza.
La FTA utilizza una logica di tipo booleano e l’albero dei guasti che si ottiene segue le regole di tale logica.
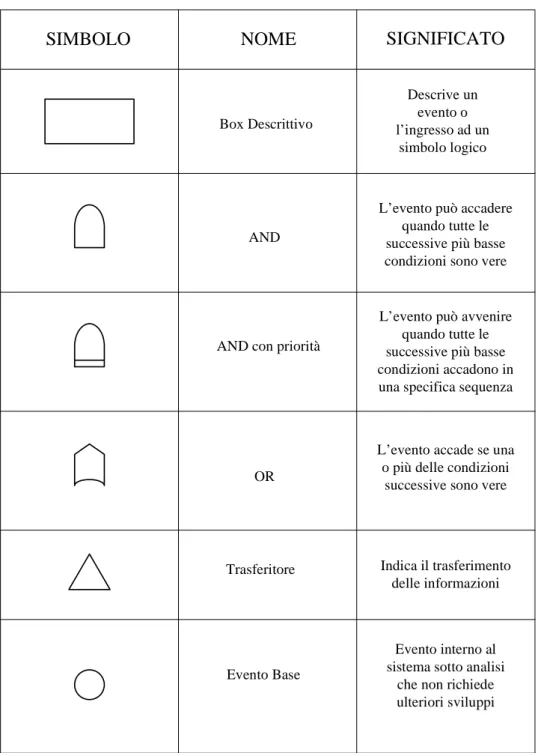
Esistono due tipi di simboli utilizzabili in questa analisi e sono quello logico e quello di identificazione di un evento.
Nella Figura successiva sono riportati i simboli utilizzati nei successivi capi-toli con il loro significato.
7 – Analisi dei livelli di sicurezza
SIMBOLO NOME SIGNIFICATO
Box Descrittivo Descrive un evento o l’ingresso ad un simbolo logico AND
L’evento può accadere quando tutte le successive più basse condizioni sono vere
AND con priorità
L’evento può avvenire quando tutte le successive più basse condizioni accadono in una specifica sequenza
OR
L’evento accade se una o più delle condizioni
successive sono vere
Trasferitore Indica il trasferimento delle informazioni
Evento Base
Evento interno al sistema sotto analisi
che non richiede ulteriori sviluppi
Figura 7.1: Significato dei simboli utilizzati nella FTA
7.2.1
Affidabilit`
a e Probabilit`
a di guasto
L’affidabilit`a o Reliability (R) `e la probabilit`a che un sistema o componente funzioni correttamente in certe condizioni di impiego per un certo tempo. Il complemento a uno dell’affidabilit`a `e la probabilit`a di guasto.
7 – Analisi dei livelli di sicurezza
Si definisce funzione densit`a di probabilit`a di guasto (Probability Density Function -PDF-) quella che descrive l’andamento del numero percentuale di guasti per unit`a di tempo.
L’integrale della PDF fornisce la probabilit`a di guasto.
Per valutare l’affidabilit`a dei componenti e quindi dei sistemi di bordo di un UAV `e possibile fare riferimento a due tipologie di guasto:
1. guasto casuale, 2. guasto per usura.
Il primo tipo di guasto colpisce prevalentemente i componenti elettronici. Il guasto casuale pu`o avvenire in qualunque momento della vita operativa del componente e ha una funzione densit`a di probabilit`a di guasto di tipo esponenziale decrescente.
La probabilit`a di guasto si ottiene integrando la distribuzione di densit`a di guasto e l’affidabilit`a si ottiene come complemento a uno della precedente. Per questo tipo di guasto si ha:
P DF (t) = λ · e−λ·t (7.1) Pf(t) = Z t 0 P DF (t) · dt = 1 − e−λ·t (7.2) R(t) = 1 − Pf(t) = e−λ·t. (7.3)
Questo tipo di guasto `e caratterizzato dal tasso di guasto (Failure Rate -FR-) dei componenti.
Il tasso di guasto `e definito come il rapporto tra il numero di componenti che si guastano nell’unit`a di tempo diviso il numero di componenti ancora funzionanti. F R(t) = − 1 R(t)· dR(t) dt ovvero: F R(t) = −P DF (t) R(t) .
Nel caso di guasti casuali si dimostra che il tasso di guasto `e indipendente dal tempo e vale λ.
Nel caso di tasso di guasto costante si pu`o parlare di tempo medio tra due guasti successivi (Mean Time Between Failure -MTBF-) definibile per via
7 – Analisi dei livelli di sicurezza
statistica.
Presi n dispositivi, nominalmente uguali e provati nelle stesse condizioni di funzionamento fino al manifestarsi del guasto, l’espressione del MTBF `e:
M T BF = n X i=1 ti n
dove ti rappresenta il tempo di funzionamento dell’n-esimo dispositivo. Per guasti casuali si ha che:
M T BF = 1 λ.
Il secondo tipo di guasto, quello per usura, colpisce prevalentemente gli organi meccanici, ha una funzione densit`a di probabilit`a di guasto gaussiana ed `e caratterizzato dalla vita media ¯t del componente e dal valore della deviazione standard σ: P DF (t) = 1 σ ·p(2π) · e (t−¯t)2 2·σ2 (7.4) σ = s PN i=1(ti− ¯t)2 N (7.5) ¯ t = PN i=1ti N . (7.6)
7.2.2
Calcolo di probabilit`
a
Una volta nota l’architettura funzionale di un sistema e stabilite le funzioni che esso pu`o svolgere si passa alla valutazione analitica della probabilit`a di guasto.
Per eseguire il calcolo occorre tenere conto delle norme di base del calcolo di probabilit`a:
(Indicate con P(A) la probabilit`a che accada un evento A e di conseguenza P(B) la probabilit`a che accada l’evento B)
7 – Analisi dei livelli di sicurezza
• La probabilit`a che A o B accadano `e P(A+B) • Teorema della probabilit`a composta:
Se A e B sono due eventi indipendenti la probabilit`a che entrambi accadano `e il prodotto delle loro probabilit`a
P (AB) = P (A) · P (B) (simbolo AND)
Se A, B e C sono tre eventi indipendenti la probabilit`a che tutti e tre gli eventi accadano `e
P (ABC) = P (A) · P (B) · P (C)
La stessa logica pu`o essere applicata a pi`u eventi indipendenti • Teorema della probabilit`a totale:
Se due eventi indipendenti possono accadere simultaneamente la pro-babilit`a che sia A o B che A e B possano accadere `e
P (A + B) = P (A) + P (B) − [P (A) · P (B)] (simbolo OR)
Se A, B e C sono tre eventi indipendenti che possono accadere simul-taneamente la probabilit`a che A o B o C, o una qualsiasi combinazione di questi tre possa accadere `e
P (A + B + C) = P (A) + P (B) + P (C) − [P (A) · P (B)] − [P (A) · P (C)] − [P (B) · P (C)] + [P (A) · P (B) · P (C)]
La stessa logica pu`o essere applicata a pi`u eventi indipendenti. • Se A e B sono eventi mutuamente escludentisi si ha che
P (A + B) = P (A) + P (B) e P (AB) = 0.
L’ Appendice B riporta una routine Matlabr creata per eseguire il calcolo della probabilit`a di guasto del “top-event” di un generico albero dei guasti noto il MTBF dei componenti base individuati. Essa deve essere utilizzata solo dopo la realizzazione grafica dell’albero dei guasti perch´e la compilazione richiede la conoscenza della struttura in esame.
Tramite la finestra di comando di Matlabr `e possibile introdurre i dati utili per il calcolo quali la durata in ore della missione, il MTBF dei componenti ed anche le informazioni sulla struttura dell’albero ed i simboli di connessione dei vari gruppi1.
1Con “gruppo” si intende un qualsiasi “sotto-albero” della struttura a blocchi in
7 – Analisi dei livelli di sicurezza
La Fig.7.2 mostra il diagramma di flusso alla base del programma scritto. Il ciclo esterno della routine `e un ciclo while che termina quando quella calcolata corrisponde alla probabilit`a di guasto del “top-event”.
7 – Analisi dei livelli di sicurezza
(m - l) > 0
sì
Calcola la probabilità per ciascun evento
no
Quella calcolata è la probabilità del TOP
EVENT ? sì P_TOP no Numero di gruppi n Calcola la probabilità di guasto del sottoalbero Durata della missione t MTBF di m componenti Calcola la probabilità per ciascun evento
Simboli di connessione degli eventi del
gruppo Simboli di
connessione degli eventi del
gruppo Probabilità di guasto già calcolata ( l ) MTBF di ( m – l ) componenti Passaggio al livello superiore Numero di eventi per gruppo (m)
8
Il sottosistema propulsivo
La verifica del sottosistema propulsivo dell’UAV `e stata eseguita consideran-do l’insieme di:
1. motore di riferimento (Moto Guzzi V75HIE 4T, Italy); 2. elica spingente a passo fisso;
3. sistema di alimentazione costituito da due pompe, una pompa princi-pale ed una pompa di emergenza, che funzionano in parallelo;
4. serbatoio principale; 5. serbatoio nutrice;
6. due sensori per il livello del carburante; 7. un filtro carburante;
8. due sensori di pressione; 9. due valvole di non ritorno.
8 – Il sottosistema propulsivo FIL T RO PO MPA 1 PO MPA 2 VALVO LA DI
NON RITORNO VALVO
LA DI NON RITORNO V A LVOLA REG. DI PRESS IONE Iniettori TLM PRESS IONE 1 P R E SSIO N E 2 IND. L IVELL O IND. L IVELL O SERBATOIO DW L MOTORE TLM INTERF.
Indicatore livello di carburante Segnale di guasto alla linea di
alim.
Figura 8.1: Sottosistema propulsivo
In questa analisi il motore `e stato considerato come un pezzo unico con una propria affidabilit`a.
8 – Il sottosistema propulsivo
Futuri lavori sull’UAV saranno finalizzati ad uno studio approfondito del mo-tore.
Per quanto concerne il sistema di alimentazione del carburante esso `e costitui-to da due pompe, una principale ed una di riserva, che portano il carburante al motore dal serbatoio principale.
La prima pompa `e azionata dal motore e la seconda da un sistema di poten-za alternativa (batteria), le due pompe sono poste in parallelo e la seconda entra in funzione in caso di guasto alla prima.
Il motore di riferimento `e dotato di una valvola regolatrice di pressione che rimanda al serbatoio la quantit`a di carburante in eccesso prima che il carbu-rante arrivi agli iniettori.
Il serbatoio principale, con una capienza di 70 Kg, `e costituito da due ser-batoi in comunicazione (vedi Fig.8.1) uno da 60 Kg e l’altro da 10 Kg ed ognuno di essi `e dotato di indicatore del livello di carburante.
Ogni linea di alimentazione ha un sensore per rilevare la pressione ed indicare se la linea funziona oppure no.
Le indicazioni dei livelli di carburante nei serbatoi e quelle della pressione nelle linee di alimentazione vengono inviate a terra tramite telemetria, ripu-lite dalle interferenze ed inviate all’indicatore.
L’indicatore di carburante della stazione di terra, riportato in Fig.8.2, `e di tipo analogico-digitale, il livello totale del carburante nel serbatoio `e a lettura digitale e quello del serbatoio nutrice a lettura analogica.
8 – Il sottosistema propulsivo
Figura 8.2: Indicatore carburante
La tabella successiva riporta i valori del MTBF dei componenti del sot-tosistema propulsivo.
Componente MTBF(flight hours)
Motore 10000
Pompa carburante 10000
Indicatore livello carburante 200000
Tabella 8.1: Mean Time Between Failure
8.1
FHA per il sottosistema propulsivo
Le funzioni individuate per i componenti del sistema propulsivo sono rispet-tivamente:
- Generare la potenza necessaria al volo (riferimento 1) - Portare il carburante al motore (riferimento 2)
- Fornire potenza meccanica al generatore elettrico (riferimento 3) Nelle pagine che seguono `e riportata la FHA effettuata per il sottosistema propulsivo come descritto al §7.1.
8 – Il sottosistema propulsivo R if. F unz ione F ase di volo Condizioni di guasto Effetti del guasto Classific azione 1 Ge n er are la p o -tenza necess a ria al v o lo Decollo (olt re la V2 ). F ase di salita (inizio) sott o la quo ta mini-ma di ap ertur a del par acadut e P erdita tota le della spin ta pro pulsiv a Il v eliv olo non ha trazio ne nece ssar ia p er co n tin ua re il v o lo. Si a ttiv ano le pro ce-dure p er il recup ero a nc he se il v eliv olo `e a ncora tropp o basso (FTS ine ffi ca ce ) Catastr ofic o V olo (cro ciera, att esa , salita , discesa) Il v eliv olo non ha tra zio -ne necess a ria p er co n tin ua -re il v olo . Si at tiv ano le pro cedure p er il recup er o R ischioso T ab el la 8. 2: F unctional Hazar d Assess ment p e r il sottosis tema p rop ulsiv o
8 – Il sottosistema propulsivo R if. F unz ione F ase d i volo Condizioni di guasto Effetti del guasto Classific azione 2 P or tare il carb u-ra n te a l mo to re Decollo . F ase di salita (inizio) sott o la q uo-ta minima di a p ertura del pa raca dute Non ar riv a car buran te al mot ore Il mo tor e no n ri esce pi `u a fornir e la p otenza necess a -ria p er il v olo . Si at ti-v a il rec up ero ma il v eliv o -lo pu `o ess ere a d una quo -ta tropp o bassa p er aprir e il par acadut e Catastr ofic o V olo Il mo tor e no n ri esce pi `u a fornir e la p otenza necess a -ria p er il v ol o. Si a ttiv ano le pr o cedure p er il re cup ero di emerg enza. R ischioso 3 F ornire p ot en-za mecc a nica al genera tore elettrico T ut te Il g enera to re non vie-ne p o rta to in rota zio-ne Il g enera tor e non genera p o -tenza ele ttrica. La ba tteria dev e pro vv edere alla con ti-n ua zio ne del v olo fino al pi `u vicino sito p er il recup ero Minor e (Maggior e) T ab el la 8. 3: F unctional Hazar d Assess ment p e r il sottosis tema p rop ulsiv o
8 – Il sottosistema propulsivo
8.2
FTA per il sottosistema propulsivo
L’albero dei guasti seguente `e riferito all’avaria “Perdita totale di spinta pro-pulsiva” in relazione al sottosistema propulsivo in esame.
Perdita totale di spinta propulsiva
Non arriva carburante al motore Avaria pompe Avaria pompa di riserva Avaria pompa principale Mancanza di carburante Avaria meccanica motore Avaria indicatore di livello serbatoio nutrice Avaria indicatore di livello serbatoio principale
Figura 8.3: Albero dei guasti sottosistema propulsivo
Il calcolo della probabilit`a di accadimento del “top-event” individuato nell’albero dei guasti di Fig.8.3 viene effettuato con la routine Matlabr de-scritta nel §7.2.2.
Anzitutto `e richiesta nella finestra di comando la durata della missione in ore.
8 – Il sottosistema propulsivo
In seguito viene richiesto il numero di gruppi in cui sono suddivisi gli eventi base al livello pi`u basso dell’albero dei guasti e nel caso in esame si hanno 2 gruppi.
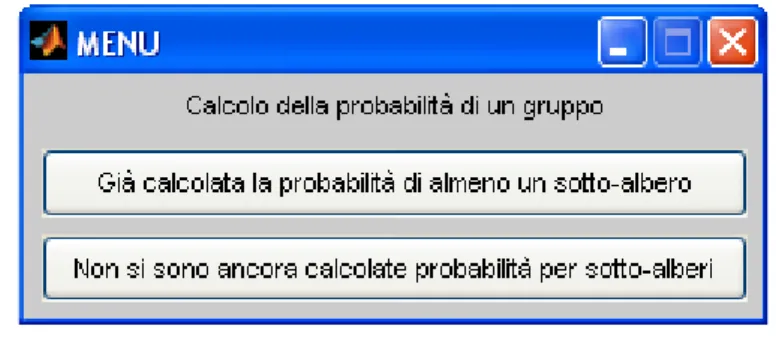
A questo punto si apre una finestra menu iniziale necessaria per far sapere al programma se sono gi`a state calcolate probabilit`a di gruppi al livello inferiore da considerare al livello attuale (condizione per il ciclo if interno).
Questo `e necessario perch´e se siamo a livelli superiori al primo possiamo gi`a aver calcolato delle probabilit`a di guasto ed il programma deve sapere quante informazioni richiedere dall’esterno (confronta il numero introdotto di eventi base del gruppo, m, con i valori di probabilit`a noti, l, e richiede il MTBF degli m − l eventi base).
Figura 8.4: Menu “Calcolo della probabilit`a di un gruppo”
All’inizio non ci sono probabilit`a gi`a calcolate e dunque `e necessario in-trodurre il MTBF di tutti gli m eventi del gruppo.
Per ciascun gruppo indicato precedentemente vengono richiesti: 1. il numero di eventi da considerare,
2. per ogni evento il MTBF con cui calcolare le affidabilit`a e quindi le probabilit`a di guasto,
3. il simbolo logico di connessione tra gli eventi.
In questo caso si hanno 2 eventi base per ogni gruppo, il MTBF di ciascun evento `e riportato nella Tab.8.1, ed entrambi i gruppi sono caratterizzati dal simbolo AND.
Al termine del calcolo della probabilit`a di un gruppo si apre una finestra come quella della figura successiva per sapere se quella calcolata corrisponde alla probabilit`a del “top-event”, in caso di risposta negativa passa a considerare il livello superiore.
8 – Il sottosistema propulsivo
Figura 8.5: Menu di uscita dal ciclo di calcolo
Le informazioni necessarie per proseguire il calcolo sono: il numero di gruppi del livello che si analizza, ora `e 1, e se `e gi`a stato effettuato il calcolo della probabilit`a di sotto-alberi per il gruppo che si sta considerando. Nel caso in esame al secondo livello di indagine il gruppo ha 2 eventi che so-no proprio dati dai sotto-alberi calcolati al passo precedente quindi richiede direttamente il simbolo di connessione, essendo m − l = 0.
Il livello ancora superiore rappresenta per il caso in esame l’ultimo ha un solo gruppo e 2 eventi da considerare. Il programma ha calcolato la probabilit`a di accadimento della condizione “Non arriva carburante al motore” quindi rimangono da introdurre il MTBF del motore ed il simbolo logico di connes-sione.
A questo punto la risposta alla finestra di Fig.8.5 `e “S`ı” e viene fornita in uscita la probabilit`a di accadimento del “top-event” dell’albero dei guasti analizzato.
Al termine del processo la finestra di comando di Matlabr appare come in Fig.8.6.
8 – Il sottosistema propulsivo
Figura 8.6: Finestra di comando al termine del calcolo
9
Il sottosistema elettrico
Il sottosistema di generazione e distribuzione della potenza elettrica a bor-do `e costituito da un generatore ed una batteria di riserva, che operano in parallelo, e da una batteria aggiuntiva, posta in stand-by, che ha la potenza minima necessaria a garantire l’attivazione del FTS.
La prima batteria funziona da starter per il motore nella fase di accensione dell’UAV.
Quando il motore `e avviato alimenta il generatore e questo a sua volta in condizioni normali alimenta tutti i sistemi di bordo e carica le batterie. In caso di avaria al generatore la batteria di riserva principale garantisce l’a-limentazione elettrica alle utenze essenziali1.
In caso di mancanza di alimentazione elettrica della linea principale la bat-teria in stand-by attiva il FTS per il recupero di emergenza dell’UAV. Il funzionamento del circuito elettrico cos`ı come appena descritto `e garantito dalla presenza lungo la linea di relay che aprono o chiudono opportunamente il circuito.
In Fig.9.1 `e riportato lo schema funzionale del sottosistema elettrico nel complesso.
1Si definiscono carichi essenziali tutti i dispositivi necessari per la certificazione che
9 – Il sottosistema elettrico UTENZE di BORDO Motore Generatore Batteria Circuito di terminazione del volo Batteria FTS
Figura 9.1: Sottosistema elettrico
Per quanto riguarda il circuito di terminazione del volo questo `e rappre-sentato in dettaglio nella Fig.9.2 (vedi anche [10]).
Dispositivo di attuazione del FTS Sistema di alimentazione per il carburante Generatore e circuiti di controllo Batteria e circuiti di controllo Relay di esclusione della batteria Relay di esclusione del generatore Relay 1 Relay di esclusione di valvole e pompe Batteria Relay FTS
Figura 9.2: Circuito di terminazione del volo
I relay presenti nel circuito appartengono a due categorie: 1. Bistabili.
9 – Il sottosistema elettrico
con l’applicazione di un segnale su un corrispondente ingresso.
A questa categoria appartengono i relay di esclusione della batteria principale e del generatore che vengono azionati da un segnale prove-niente dal FMS.
2. Monostabili.
Questa categoria ha una sola posizione stabile e l’altra si ha solamente quando `e presente il segnale di eccitazione in ingresso.
A questa categoria appartengono il relay FTS, il relay di esclusione delle pompe ed il relay 1 che pu`o essere azionato da un comando da terra o del FMS.
Tra questi il relay 1 `e normalmente aperto (N.A.), il relay di esclusione delle pompe `e normalmente chiuso (N.C.) e quello FTS `e normalmente chiuso sul ramo di attivazione del FTS.
Un possibile modo di funzionamento del circuito di terminazione del volo avrebbe potuto essere quello di obbligare l’apertura del portello del paraca-dute in caso di assenza totale di alimentazione elettrica. Assicurando invece l’attivazione del FTS per mezzo di una batteria dedicata si evita la necessit`a di dover fornire continuamente un minimo di alimentazione elettrica (anche quando il velivolo `e a terra fermo) per non avere una apertura involontaria del portello.
La tabella successiva riporta i valori del MTBF dei componenti del sottosi-stema elettrico.
Componente MTBF(flight hours)
Generatore 22000
Batteria 10000
Tabella 9.1: Mean Time Between Failure
9.1
FHA per il sottosistema elettrico
La funzione del sottosistema elettrico `e quella di fornire energia elettrica ai sistemi di bordo.
L’analisi di rischio funzionale per questo sottosistema `e riportata nella tabella seguente.
9 – Il sottosistema elettrico R if. F unz ione F ase di volo Condizioni di guasto Effetti del guasto Classific azione E 1.1 F ornire ener-gia elettrica ai sistemi di b ordo Decollo . F ase di salita (inizio) sott o la q uo-ta minima di a p ertura del pa raca dute P erdita tota le di ali-men ta zio ne elettr ic a Il v eliv olo no n `e pi `u co n tro l-labile. Si a ttiv a il FTS ma il v eliv o lo `e ancor a tropp o basso (FTS ine ffi ca ce ) Catastr ofic o E 1.2 V olo Il v eliv olo no n `e pi `u co n-tro llabile. Si attiv a il FTS R ischioso T ab el la 9. 2: F unctional Hazar d Assess ment p e r il sottosis te ma elettrico
9 – Il sottosistema elettrico
9.2
FTA per il sottosistema elettrico
L’albero dei guasti seguente `e riferito all’avaria “Perdita totale di alimenta-zione elettrica” riferita al sottosistema elettrico in esame.
Perdita totale alimentazione elettrica Avaria al generatore Avaria alla batteria di riserva
Figura 9.3: Albero dei guasti sottosistema elettrico
In questo caso noto il MTBF dei componenti individuati nell’albero dei guasti dalla Tab.9.1 si ottiene una probabilit`a di occorrenza per il “top-event” pari a 6.5397 · 10−7.
La finestra di comando che appare al termine del calcolo mediante la routine Matlabr `e riportata in Fig.9.4.
10
Conclusioni e Sviluppi futuri
Alla luce delle attuali linee guida, individuate dalle Autorit`a Aeronautiche per condurre all’emanazione di futuri codici per la certificazione di UAV civi-li, si `e effettuata una revisione del progetto preliminare di UAV individuato in studi precedenti nell’ambito del progetto SCAUT.
La revisione `e stata impostata seguendo le richieste necessarie a garantire la sicurezza dei terzi sorvolati.
Le linee guida indicate propongono, per ridurre le misure di sicurezza neces-sarie a garantire la Security, di limitare le prestazioni dell’UAV per diminuire l’appettibilit`a del Sistema da parte di un avversario.
Ritenendo che le prestazioni del velivolo, individuate in studi precedenti, lo rendano poco appetibile, si `e verificato che gli consentano di svolgere missioni civili di monitoraggio del territorio.
Per quanto riguarda la struttura del velivolo se ne `e determinata una ar-chitettura funzionale per verificare, tenendo conto degli ingombri noti per sistemi esistenti, la possibilit`a di inserire all’interno della fusoliera i sistemi di bordo richiesti per il volo.
Infine si `e iniziata la verifica dell’affidabilit`a degli apparati di bordo. Per i sottosistemi propulsivo ed elettrico, dopo aver rappresentato lo schema fun-zionale ed individuato le funzioni principali, sono state effettuate una FHA ed una FTA.
La probabilit`a di occorrenza della condizione “Perdita totale di spinta pro-pulsiva” ha conseguenze sul volo classificabili come “Rischiose” o “Catastro-fiche”.
10 – Conclusioni e Sviluppi futuri
volo (decollo, prima fase di salita) in cui la quota raggiunta dal velivolo non `e sufficientemente elevata da garantire, con l’apertura del paracadute, una op-portuna riduzione della velocit`a di discesa prima dell’impatto al suolo (FTS inefficace).
La condizione nella fase di volo si `e considerata “Rischiosa” perch´e occorre provvedere ad un immediato azionamento del FTS con il rischio di trovarsi al momento sopra zone popolate.
Per la condizione “Perdita totale di alimentazione elettrica” si `e ottenuta una probabilit`a di occorrenza dell’ordine di 10−7.
La condizione ha conseguenze “Catastrofiche” nel caso che avvenga in fasi di volo che possano rendere inefficace l’apertura del FTS, o in casi in cui ad essa si aggiunga la mancata attivazione del FTS per una avaria nel circuito di terminazione del volo.
Una probabilit`a di occorrenza per la condizione di mancata attivazione del FTS, inferiore a 10−7, la si pu`o garantire con la presenza di una batteria dedicata.
Tale provvedimento potrebbe essere utile per tutti i sistemi di bordo la cui perdita possa avere conseguenze “Catastrofiche” sul volo.
In futuro nell’ambito del progetto SCAUT si dovr`a:
• verificare quanto asserito fino ad ora quando si troveranno definitivi codici di certificazione,
• proseguire la verifica dell’affidabilit`a degli apparati di bordo per giun-gere ad una pi`u dettagliata individuazione dei pesi e delle dimensioni dell’UAV.
Appendice
A
Sistemi di bordo
Flight Management System Ingombro cad.: 155 × 155 × 155 mm
Peso cad.: 2.2 Kg (calcolatore 0.5 Kg contenitore 1.7 Kg) Carico utile:
- Galileo Galiflir Astro ([2])
Dimensioni: 380 mm diametro, 384 mm larghezza, 596 mm altezza Peso totale: 49.5 Kg
- Inframetrics 445G Mk II([2])
Dimensioni: 229 mm diametro, 343 mm altezza Peso: 17 Kg
- Lockheed Martin MSAR([2]) Dimensioni:
Radar Unit: 394 mm lunghezza, 330 mm larghezza, 165 mm al-tezza
Processor: 430 mm lunghezza, 300 mm larghezza, 100 mm altezza Area antenna: 23 cm2
Peso:
Radar Unit: 19.5 Kg Processor: 8 Kg Telecamere
A – Sistemi di bordo
Dimensioni: 140.5 mm lunghezza,70 mm diametro Peso: ≈ 1 Kg
Piattaforma inerziale
TN-90 Compact inertial Navigation System ([8] pag.404) Dimensioni: 128 × 127 × 119 mm
Peso: 2,4 Kg GPS:
- ASN-22 Combined GPS/GLONASS Receiver Card ([8] pag.397) Dimensioni: 125 mm larghezza, 160 mm altezza
Peso: < 0.4 Kg
- MX4200 GPS Receiver ([8] pag.449) Dimensioni: 139.7 × 171.4 × 45.7 mm Peso: < 0.9 Kg
Data Link/Video Link BAI DCL 1000 ([2]) Dimensioni:
Trasmettitore: 76.2 mm lunghezza, 50.8 mm larghezza, 31.8 mm altez-za
Ricevitore: 95.3 mm lunghezza, 69.9 mm larghezza, 26.7 mm altezza Transponder
TPR 2060 Transponder ([8] pag.137) Dimensioni: 45 × 160 × 215 mm Peso: 1.18 Kg
Traffic Collision Avoidance System
TCAS791 Traffic Alert and Collision Warning System ([8] pag.138) Dimensioni:
TRC791 Ricevitore/Trasmettitore: 193 × 157.5 × 345.4 mm NY152 Antenna omnidirezionale: 57.1 × 47.2 × 68.1 mm NY156 Antenna unidirezionale: 273.4 × 158.7 × 35.6 mm Peso:
A – Sistemi di bordo
Antenna omnidirezionale: 0.14 Kg Antenna unidirezionale: 1.04 Kg Air Data System
- Micro Air Data Computer ([8] pag.338) Dimensioni: 106.7 × 149.9 × 157.5 mm Peso: 2.04 Kg
- Type 300 Air Data Unit ([8] pag.316) Peso: 1 Kg
- ADS 850 Digital Air Data Systems ([8] pag.331) Dimensioni: 1/2 Air Transport Racking
(Dimensioni ATR:482.6 × 431.8 × 203.2 mm) Peso: 2.52 Kg
Appendice
B
Programma Matlab per il calcolo della
probabilit`
a di guasto
%Questo programma calcola la probabilit`a di %occorrenza di un evento TOP per verificare %se il sistema in esame `e conforme ai requisiti %di sicurezza.
%E’ costituito da un ciclo iterativo di domande %ripetutamente rivolte a chi compila il programma. %Il programma deve essere compilato solo dopo aver
%completato l’albero dei guasti del sistema considerato. %Le domande vengono poste partendo dagli eventi base %quindi si opera a ritroso dal livello pi`u basso %via via verso quelli superiori fino al top event. %Questa routine considera guasti casuali.
fin=[ ];
t = input(’Durata della missione in ore ’);
f = 3; %inizializzazione della variabile serve per %entrare nel ciclo
l = 0; %inizializzazione della variabile while f > 1
m = [ ];
n = input(’Numero di gruppi in cui sono divisi gli eventi ’); for j = 1:n
B – Programma Matlab per il calcolo della probabilit`a di guasto
controllo = menu(’Calcolo della probabilit`a di un gruppo’, ’Gi`a calcolata la probabilit`a di almeno un sotto-albero’, ’Non si sono ancora calcolate probabilit`a per
sotto-alberi’); if controllo == 1
stringa = strcat(’Numero di eventi da considerare per il gruppo ’,num2str(j),’ :’);
m(j) = input(stringa ); %vettore di n elementi if m(j) > l & l == 0 %la condizione su l serve
%nel primo caso, siamo al %livello pi`u basso
for jj=1:m(j)
evmtbf = strcat(’MTBF dell evento ’,num2str(jj), ’ del gruppo ’,num2str(j),’:’);
mtbfev = input(evmtbf); Rf(1,jj) = exp(-(t/mtbfev)); pf(1,jj) = 1-Rf(1,jj); end elseif m(j) > l & l > 0 for jjj=1:(m(j)-l)\\
evmtbf = strcat(’MTBF dell evento ’,num2str(jjj), ’ del gruppo ’,num2str(j),’ : ’);
mtbfev = input(evmtbf); Rf(1,jjj) = exp(-(t/mtbfev)); pf(1,jjj) = 1-Rf(1,jjj); end for jjjj=(m(j)-l+1):m(j) ind = jjjj-(m(j)-l); pf(1,jjjj) = fin(ind); end else %m=l pf = fin;
end %fine del ciclo if interno
B – Programma Matlab per il calcolo della probabilit`a di guasto
stringa = strcat(’Numero di eventi da considerare per il gruppo ’,num2str(j),’ : ’);
m(j) = input(stringa );\%vettore di n elementi for x = 1:m(j)
evento = strcat(’MTBF dell evento ’,num2str(x), ’ del gruppo ’,num2str(j),’:’);
mtbf = input(evento);
\%Calcola l’affidabilit`a degli eventi R(1,x) = exp(-(t/mtbf));
\%Calcola la probabilit`a di guasto degli eventi pf(1,x) = 1-R(1,x);
end
end %fine del ciclo if esterno
%Simbolo di connessione tra gli eventi di ogni gruppo = s, %serve per calcolare la probabilit`a di ciascun gruppo;
simbolo = strcat(’Simbolo di connessione tra gli eventi del gruppo’,num2str(j));
s = menu(simbolo,’OR’,’AND’,’AND.p’); if s == 1 %OR
%le probabilit`a vanno sommate
P_t_s = sum(pf); %somma gli elementi elseif s == 2 %AND
%le probabilit`a vanno moltiplicate
P_t_s = prod(pf); %moltiplica gli elementi else %AND con priorit`a
kk = input(’Numero di possibili sequenze ’); tt = input(’Numero di eventi in sequenza ’); WW = kk/(factorial(tt));
P_t_s = (kk/WW)*prod(pf); end
fin = [fin P_t_s];
B – Programma Matlab per il calcolo della probabilit`a di guasto
%Quando al livello superiore si deve considerare la %probabilit`a gi`a calcolata di uno o pi`u gruppi tenere %presente che quello/i noto/i si considera sempre prima %degli altri (quelli ancora da calcolare)
axl=length(fin);
fin(1:n) = fin(axl-(n-1):axl); fin(n+1:axl)=[ ];
l = max(size(fin));
f = menu(’Quella calcolata `e la probabilit`a del TOP EVENT?’,’S`ı’,’No’);
end %fine del ciclo while su f
Bibliografia
[1] The Joint JAA/EUROCONTROL Initiative on UAVs, “UAV TASK-FORCE Final report: A concept for european regulations for civil un-manned aerial vehicles(UAVs),” Tech. rep., JAA/EUROCONTROL, 2004.
[2] Jane’s, Unmanned aerial vehicles and target , Kenneth Munson, 1999. [3] Casarosa, C., Meccanica del volo, Edizioni PLUS, 2004.
[4] RAI-ENAC, Presentation of the RAI-UAV Airworthiness Standard , 1999.
[5] Casarosa, C., Galatolo, R., Mengali, G., e Pisani, M., Progetto SCAUT: Studio di fattibilit`a, Atti di Dipartimento, Universit`a degli studi di Pisa, Dipartimento di Ing. Aerospaziale, Pisa, 2001.
[6] EASA, “Policy for UAV certification,” Advance-notice of proposed amendment(NPA), 2005.
[7] Haddon, D.R. e Whittaker, C.J., “Aircraft Airworthiness certification standards for civil UAVs,” UK Civil Aviation Autority, 2002.
[8] Jane’s, Avionics, Chris Johnson, 1996/97.
[9] Guidelines and methods for conducting the safety assesssment process on civil airborne systems and equipment , 1996.
[10] Ducci, A. e Bacchereti, M., Studio di fattibilit`a di un sistema di controllo automatico del territorio, Tesi di Laurea, Universit`a degli studi di Pisa, Facolt`a di Ingegneria, A.A. 1998-1999.
[11] Chiesa, S., Affidabilit`a, sicurezza e manutenzione nel progetto dei sistemi , C.L.U.T., 1990.
Elenco delle figure
2.1 Categorie per UAV civili . . . 8
2.2 Tempi di introduzione di applicazioni civili/commerciali per UAV . . . 9
2.3 Safety and Security . . . 11
3.1 Vulnerabilit`a del Sistema . . . 15
3.2 Campo visivo dei sensori . . . 17
3.3 Primo esempio di missione . . . 19
3.4 Secondo esempio di missione . . . 20
3.5 Schema di possibile missione per UAV . . . 22
4.1 Caso di atterraggio di emergenza sotto controllo . . . 31
4.2 Caso di atterraggio con perdita incontrollata del velivolo . . . 32
4.3 Determinazione dei codici di riferimento per velivoli conven-zionali in base all’area letale . . . 34
4.4 Probabilit`a di incidente fatale per tipi comuni di UAV . . . 35
4.5 Probabilit`a di perdita del velivolo in base ai tre modelli iden-tificati . . . 36
4.6 Confronto tra categorie di UAV e categorie delle FAR 23 . . . 36
4.7 Ridefinizione dei codici degli aerei civili per gli UAV . . . 37
4.8 Relazione tra classi di aeroplani, probabilit`a, severit`a delle condizioni di avaria . . . 41
5.1 Schema semplificato dell’architettura dell’UAV SCAUT . . . . 51
6.1 Sezione della fusoliera . . . 57
6.3 Sistemi di bordo dell’UAV SCAUT . . . 59
7.1 Significato dei simboli utilizzati nella FTA . . . 64
7.2 Diagramma di flusso del programma per il calcolo delle pro-babilit`a di guasto . . . 69
8.1 Sottosistema propulsivo . . . 71
8.2 Indicatore carburante . . . 73
8.3 Albero dei guasti sottosistema propulsivo . . . 76
8.4 Menu “Calcolo della probabilit`a di un gruppo” . . . 77
8.5 Menu di uscita dal ciclo di calcolo . . . 78
8.6 Finestra di comando al termine del calcolo . . . 79
9.1 Sottosistema elettrico . . . 81
9.2 Circuito di terminazione del volo . . . 81
9.3 Albero dei guasti sottosistema elettrico . . . 84
Elenco delle tabelle
1.1 Caratteristiche principali dell’UAV individuate nel progetto preliminare . . . 3 4.1 Relazione tra Severit`a del guasto e Probabilit`a di occorrenza . 39 7.1 Esempio di tabella per la FHA . . . 61 8.1 Mean Time Between Failure . . . 73 8.2 Functional Hazard Assessment per il sottosistema propulsivo . 74 8.3 Functional Hazard Assessment per il sottosistema propulsivo . 75 9.1 Mean Time Between Failure . . . 82 9.2 Functional Hazard Assessment per il sottosistema elettrico . . 83
Elenco degli acronimi
SCAUT Sistema di Controllo Automatico del Territorio UAV Unmanned Aerial Vehicle
DIA Dipartimento di Ingegneria Aerospaziale ATC Air traffic Control
ATM Air Traffic Management RAI Registro Aeronautico Italiano JAA Joint Aviation Authorities
EUROCONTROL European Organisation for the Safety of Air Naviga-tion
GMES Global Monitoring of Environment and Security SAR Synthetic Aperture Radar
MSAR Miniature Synthetic Aperture Radar
TESAR Tactical Endurance Synthetic Aperture Radar FHA Functional Hazard Assessment
SSA System Safety Assessment CAA Civil Aviation Authority VLA Very light aircraft
FTS Flight Termination System FMS Flight Management System ATM Air Traffic Management
EASA European Aviation Safety Agency GCS Ground Control Station
TCAS Traffic Collision Avoidance System FTA Fault Tree Analysis
GPS Global Positioning System MTBF Mean Time Between Failure ATR Air Transport Racking