Capitolo 2
Aspetti della cinematica delle
sospensioni per una vettura da
competizione
Lo scopo delle sospensioni è quello di far lavorare al meglio i pneumatici e fornire al pilota un comportamento prevedibile, tale da consentirgli di avere il totale controllo della vettura in qualsiasi condizione di guida. Le sospensioni dovrebbero garantire a mantenere tutte e quattro le ruote in contatto con il suolo, in modo che i pneumatici possano essere sfruttati al limite della loro capacità. Se si vuole una cinematica piana nel moto relativo del porta mozzo-ruota rispetto alla scocca, si può collegare la ruota della vettura alla scocca, mediante il più classico dei cinematismi piani, ovvero il quadrilatero articolato (four-bar chain linkage) nel quale la scocca funge da telaio e la ruota è solidale alla biella, costituita dal porta mozzo, e collegata al telaio tramite due bilancieri, rappresentati dai triangoli inferiori e superiore della sospensione.
Quello che ne risulta è il classico schema a quadrilateri trasversali SLA-short long Arm suspension. Da un certo punto di vista può essere considerata come una soluzione intermedia fra il monobraccio trasversale e i bracci multipli. Trattandosi di un corpo rigido in moto piano, ha senso individuare il centro di istantanea rotazione Ci del moto relativo fra il porta mozzo e la scocca. Con un opportuno
dimensionamento del quadrilatero si possono avere traiettorie abbastanza vicine alla verticale con piccole variazioni dell’inclinazione del piano medio longitudinale delle ruote rispetto alla vettura, ovviando in tal modo a gran parte degli svantaggi delle sospensioni a bracci trasversali. Il prezzo da pagare è una maggiore complessità costruttiva. Il sistema a doppio quadrilatero è lo schema costitutivo del modello in esame. Tale geometria offre ottime caratteristiche di rigidezza e
ottime caratteristiche cinematiche ed ampie possibilità di regolazione. Si tratta
comunque di un tipo di sospensione abbastanza versatile, molto utilizzata su vetture sportive o da competizione perché si possono ottenere comportamenti diversi variando di poco le distanze relative dei quattro snodi oppure modificando la lunghezza dei vari triangoli. Quando si progetta una sospensione ci sono molti fattori che ne influenzano il comportamento e molti di questi interagiscono anche fra di loro. Per questi motivi molta attenzione viene fatta, inizialmente, per trovare un compromesso che funzioni bene in tutte le condizioni di guida durante le competizioni.
Per assetto dell’autoveicolo si intende la condizione geometrica di tutti gli organi che concorrono a determinare la posizione delle ruote in movimento sul terreno sia in rettilineo sia in curva. Tale assetto geometrico è controllabile solo in condizioni statiche cioè a vettura ferma, con le ruote in posizione diritta al senso di marcia ed in posizione di sterzata. Quando la vettura è in marcia, a seconda delle varie condizioni di carico, intervengono molteplici forze, create dalla resistenza all’avanzamento,dalle forze inerziali in accelerazione, decelerazione ed in curva, che tendono a modificare l’assetto geometrico. Regolando tale assetto si tiene conto di queste variazioni cercando di ottenere il desiderato equilibrio delle varie forze, in funzione dei punti di applicazione di esse a vettura in moto. Nel seguente lavoro di Tesi ci si riferirà ad una sospensione a quadrilatero trasversale deformabile o quadrilatero articolato (double wishbone in letteratura anglosassone) nel classico schema, diffusissimo per le vetture da competizione, SLA - short long arm. I fattori presi in considerazione per definire l’assetto della vettura in questo lavoro di tesi sono mostrati di seguito.
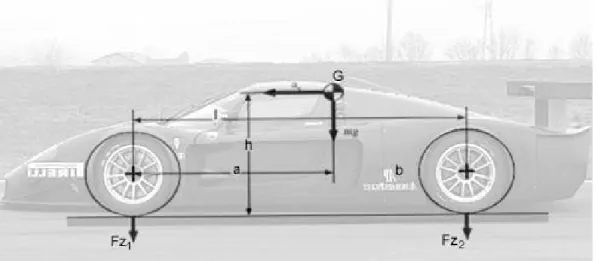
2.1 Interasse ( l ) Il passo o interasse (l) è la distanza tra il centro dell’assale anteriore e il centro dell’assale posteriore. Ha una grande influenza sulla distribuzione del carico sugli assali. Un passo lungo darà meno trasferimento di carico tra l’assale anteriore e quello posteriore, rispetto ad un interasse più corto in accelerazione ed in frenata, secondo l’equazione 2.1 e la Figura 2.1.
Figura 2.1. Vista laterale dei parametri per il calcolo del trasferimento di carico longitudinale.
m
a
h
mg
a
F
m
a
h
mg
b
F
x z x z⋅
⋅
+
⋅
=
⋅
⋅
+
⋅
=
2 1 ( 2.1 )Un passo più lungo quindi, andrà bene con molle più morbide e aumenterà il livello di confort per il pilota. D’altra parte però un passo più corto ha il vantaggio di avere un minor raggio di curva a parità di angolo di sterzo,vedi paragrafo 4.3 [1]. Una vettura con un passo troppo corto potrà risultare tuttavia nervosa in uscita di curva e nella guida in rettilineo alle elevate velocità.
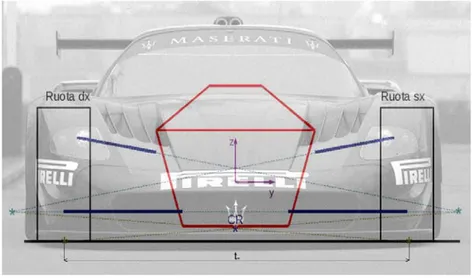
2.2 Larghezza carreggiata ( tw track width) e semicarreggiata La larghezza della carreggiata t è la distanza tra le due ruote dello stesso asse, misurata rispetto ai punti a terra delle due ruote. Tale punto è calcolato in corrispondenza della sezione posta a metà della larghezza della ruota. La semicarreggiata è invece la coordinata Y del punto a terra della ruota. Essa misura la semidistanza tra le due ruote dello stesso asse, si veda la Figura 2.2. Essa ha influenza sul
comportamento della vettura in curva e sulla tendenza al rollio ed è di maggiore importanza quando si progetta una vettura da competizione.
Figura 2.2. Larghezza della carreggiata; vista frontale del sistema.
Maggiore è la larghezza della carreggiata, minore è il trasferimento di carico laterale in curva e viceversa, secondo l’ Equazione 2.2 (con µlat= forza centrifuga
laterale) che mostra il trasferimento di carico per un assale generico; vedi formula
5.15 in [1]. tw h F lat CG z ⋅ = ∆ µ ( 2.2 ) Una carreggiata larga ha lo svantaggio che occorre un maggiore movimento laterale della vettura per evitale un ostacolo. La quantità di trasferimento di carico laterale desiderato dipende dal tipo di pneumatici montati sulla vettura, paragrafo 2.9. Se la vettura è provvista di un dispositivo antirollio, questo inciderà anche sul trasferimento di carico. Particolare interesse riveste la misura del recupero di carreggiata, ovvero la legge con la quale varia la carreggiata in funzione dell’altezza da terra. Normalmente si cerca di contenere la variazione della semicarreggiata entro valori trascurabili anche quando la ruota subisce una escursione molto ampia, in maniera da non avere effetti secondari di sterzata della vettura quando una sola ruota,incontrando una deformazione del fondo stradale, subisce una variazione della sua altezza da terra. E’ interessante notare come, quando la vettura è soggetta al rollio, le semicarreggiate del lato esterno ed
interno alla curva subiscano variazioni di segno opposto, dovute alle corrispondenti variazioni di segno opposto della misura dell’altezza da terra. Alcuni progettisti sostengono che la somma delle semicarreggiate debba rimanere costantemente pari al valore della carreggiata in condizioni di rollio nullo, al fine di impedire variazioni del raggio di curvatura della vettura legate al valore dell’angolo di rollio.
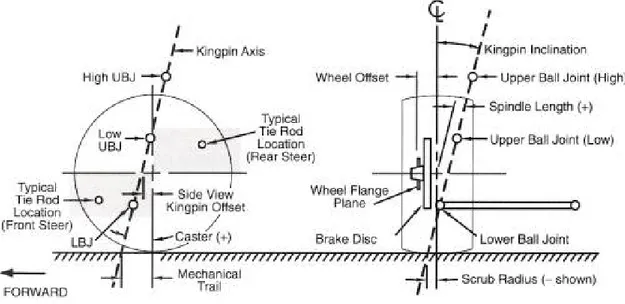
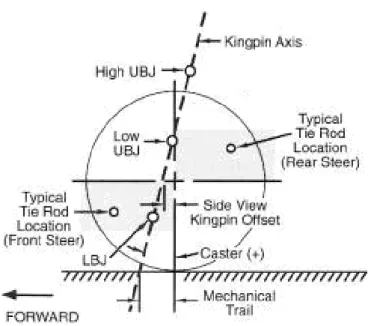
2.3 Geometria di sterzo Per la definizione degli altri parametri geometrici caratterizzanti l’asse di sterzo della vettura e degli effetti che ne derivano ci si riferirà alla Figura 2.3.
Figura 2.3. Geometria del Kingpin; vista laterale e frontale del sistema.
Da questa si definiscono:
Asse di sterzo come l’asse passante per i punti UBJ e LBJ. Kingpin come inclinazione asse di sterzo sul piano trasversale.
Caster come inclinazione asse di sterzo sul piano longitudinale (Caster angle). BTL- Avancorsa come distanza misurata a terra tra le proiezioni dell’asse di sterzo ed il centro ruota (caster trail) nel piano longitudinale.
BTT – Offset come braccio a terra sul piano trasversale (scrub radius) misurato fra la proiezioni dell’asse di sterzo ed il centro ruota nel piano trasversale.
BCRL come braccio a centro ruota dell’asse di sterzo sul piano longitudinale. BCRT come braccio a centro ruota dell’asse di sterzo sul piano trasversale.
UBJ (Upper Ball Joint) Centro del giunto sferico del triangolo anteriore superiore lato ruota.
LBJ (Lower Ball Joint) Centro del giunto sferico del triangolo anteriore inferiore lato ruota.
Ci sono numerosi effetti dovuti al valore di questi parametri; gli effetti considerati in questo lavoro di tesi si trovano in [1] ,[3]. Iniziamo ad esaminare gli effetti di tali parametri geometrici passandoli in rassegna uno ad uno.
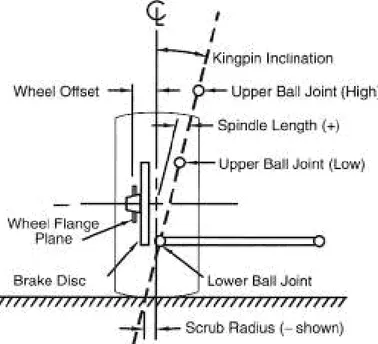
2.4 Kingpin (inclinazione asse di sterzo) e braccio a terra trasversale L’angolo di Kingpin è l’angolo tra la proiezione dell’asse di sterzo sul piano trasversale e la perpendicolare a terra. Esso è positivo se la sua parallela passante per il centro dell’impronta del pneumatico a terra, si trova ad essere inclinata verso l’interno della vettura. Gli stessi effetti dell’angolo di caster sono anche qui descrivibili qualora si pensi ad un asse di sterzo avente angolo di caster nullo, in presenza di angolo di Kingpin. Il Kingpin è determinato dalla posizione del giunto sferico superiore, UBJ, e da quello inferiore LBJ. Nella vista frontale tale angolo è chiamato inclinazione del Kingpin (asse di sterzo) e la distanza dal centro dell’impronta della ruota fino all’asse centrale è chiamato (BTT) braccio a terra trasversale. La distanza dall’asse di kingpin al piano longitudinale passante per il centro ruota misurata orizzontalmente all’altezza dell’asse è chiamata braccio a centro ruota longitudinale, o avancorsa.
Figura 2.4. Vista frontale della ruota anteriore; Geometria del Kingpin e braccio a terra trasversale.
2.5 Avancorsa (Caster trail) Se ipotizziamo di avere una avancorsa positivo, il prolungamento dell’asse di sterzo a terra, misurato sul piano longitudinale, cadrà davanti alla proiezione del centro ruota a terra. Schematizzando per semplicità che la forza scambiata tra ruota e terreno passi per il centro dell’impronta a terra,rimane evidente che a ruote sterzate con un certo angolo di sterzo, si genera un momento intorno all’asse di sterzo che tende a riportare la ruota nella condizione di angolo di sterzo nullo. Tale effetto è chiamato auto allineamento e fa sì che il pilota, una volta innescata una manovra di sterzata, senta una forza al volante che si oppone a tale perturbazione. Con avancorsa negativa, qualsiasi perturbazione esterna che provochi una variazione dell’angolo di sterzo, sarebbe automaticamente amplificata rendendo quindi la vettura instabile. Se l’avancorsa fosse nullo, il comportamento dello sterzo sarebbe neutro e quindi non verrebbe a generarsi alcun effetto di auto allineamento o disallineamento. Tale situazione non sarebbe accettabile per la stabilità della vettura in rettilineo.
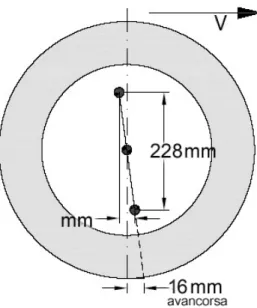
2.6 Angolo di Caster L’angolo di Caster o Incidenza è l’angolo di inclinazione longitudinale dell’asse di sterzo. Da semplici considerazioni geometriche possiamo calcolare l’angolo di Caster come: arctan(16/228) = 4.01°
Vedi schema geometrico in figura 2.5.
Figura 2.5. Vista laterale della ruota anteriore; determinazione dell’angolo di caster e dell’avancorsa.
Tale angolo è positivo se la sua parallela passante per il centro ruota produce un avancorsa positivo. L’ampiezza dell’angolo di caster è in genere legata alla necessità di avere una avancorsa positivo. L’effetto principale della presenza dell’angolo di caster, è sicuramente la differenza esistente tra la misura dell’avancorsa e quella dell’avancorsa normale che porta la vettura ad essere sottoposto all’effetto del pompaggio. Per poter comprendere tale effetto puramente cinematico, si pensi di bloccare le sospensioni della vettura e di fissare la posizione del telaio. In tali condizioni ruotando lo sterzo e tracciando la traiettoria (descrive un cono) del punto di contatto del pneumatico a terra nell’istante iniziale, si intuisce subito che la sua distanza rispetto al livello del suolo non è costante. Non potendo avvenire il distaccamento o la compenetrazione tra pneumatico ed asfalto,si produce un effetto di abbassamento e sollevamento della vettura durante la sterzatura, chiamato appunto pompaggio. Sia nel caso di avancorsa positivo che negativo, partendo dalla condizione con l’asse delle ruote perpendicolari al piano longitudinale, la rotazione delle ruote che porti ad un allontanamento dalla
situazione iniziale, produce un abbassamento della scocca della vettura, viceversa il contrario.
Figura 2.6. Vista laterale della ruota anteriore; Angolo di Caster e Avancorsa.
2.7 Braccio a terra trasversale (scrub radius) BTT. Lo scrub radius è definito positivo se il prolungamento dell’asse di sterzo, sul piano trasversale, cade all’interno della carreggiata della vettura; negativo in caso contrario. Il braccio a terra negativo fa si che esista costantemente,su entrambi gli assi di sterzo delle ruote, un momento che tende a far ruotare il pneumatico verso l’interno della vettura, anche durante il moto rettilineo. Si capisce quindi che, in caso di mancata aderenza di uno dei due pneumatici, tale momento tenderebbe a far girare le ruote verso quest’ultimo, contrastando il momento di imbardata dovuto all’aderenza sul pneumatico opposto; un effetto contrario nasce in caso di scrub radius positivo. Da notare che, durante il moto della sospensione, sia il caster trail che lo scrub radius, possono variare ed è necessario che non cambino il loro segno. In tal caso, infatti, si genererebbe un cambiamento difficilmente prevedibile per il pilota che si trovasse a condurre la vettura.
2.8 Braccio a centro ruota longitudinale Il braccio a centro ruota longitudinale è la distanza misurata sul piano longitudinale tra il centro ruota e l’asse di sterzo. E’ positivo se il centro ruota si trova dietro l’asse di sterzo. In genere si cerca di
semiasse, in realtà esso serve a ridurre il valore dell’angolo di caster a parità di avancorsa. La sua presenza influenza però lo strisciamento del punto di contatto del pneumatico a terra in fase di sterzatura e quindi sia l’usura del pneumatico, sia l’aumento dello sforzo al volante nelle manovre da fermo. Un aspetto positivo della presenza di un braccio a terra longitudinale negativo, è l’effetto di aumentare il recupero di camber durante la sterzatura.
2.9 Braccio a centro ruota trasversale Il braccio a centro ruota trasversale è la distanza misurata sul piano trasversale tra il centro ruota e l’asse di sterzo. E’ positivo se il centro ruota si trova esternamente all’asse di sterzo rispetto alla vettura. Il valore di tale braccio è legato alla necessità di ridurre il BTT e di avere sufficiente spazio all’interno del cerchio ruota per l’alloggiamento del gruppo freni. La sua presenza influenza anche lo strisciamento del punto di contatto del pneumatico a terra in fase di sterzatura e quindi sia l’usura del pneumatico, sia l’aumento dello sforzo al volante nelle manovre da fermo.
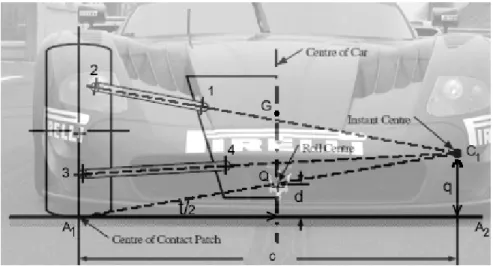
2.10 Centro di rollio e centro di istantanea rotazione Per studiare il moto spaziale di una sospensione è necessaria una analisi cinematica strutturata con un modello multibody, che verrà eseguita di seguito. Inizialmente per introdurre l’argomento del centro di rollio e beccheggio e del loro moto, si è assunto di studiarne il moto piano, prendendo in analisi le proiezioni dei punti sul piano trasversale contenente l’asse delle ruote. I centri di velocità di interesse sono rappresentati nella Figura 2.6.
Il centro di rollio Q si determina facilmente con la seguente costruzione geometrica,una volta determinati i centri di istantanea rotazione C1 e C2 fra mozzo e telaio. L’intersezione delle due rette passanti per A1 e C1 e per A2 e C2 (non mostrata in Figura 2.6.) individuano il punto Q sulla mezzeria della vettura, nel caso si supponga la simmetria nella configurazione considerata. Per costruzione vale quindi la seguente relazione geometrica,
2 / t d c q = ( 2.3 ) Da questa uguaglianza ne discende che per non avere rollio, ovvero perché sia Mr = 0, occorrerebbe che h = d, ovvero che l’altezza d dovrebbe coincidere con l’altezza del baricentro della massa sospesa; mentre per non avere Jacking, dovrebbe giacere sul piano stradale. Q viene generalmente indicato in letteratura come centro di rollio, ma tale concetto è spesso preso in considerazione a sproposito. La definizione di centro di rollio è specificata nel documento SAEJ670e, Vehicle Dynamics Terminology, secondo cui esso è “ the point in the transverse vertical plane throught any pair of wheel centers at wich lateral force may be applied to the sprung mass without producing suspension roll”. Tale definizione però determina unicamente l’altezza q del centro di rollio e non ne fissa la posizione. Inoltre si basa su concetti di statica e non prevede la deformazione nè dei pneumatici, nè della sospensione.
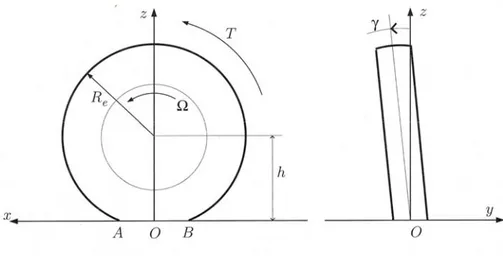
2.11 Camber Si definisce angolo di camber (angolo di campanatura) γ ° l’eventuale inclinazione del piano medio longitudinale della ruota rispetto all’asse verticale. Il camber è considerato positivo quando la ruota è inclinata all’esterno sulla parte superiore rispetto alla vettura, negativo se viceversa. La sua variazione cinematica è un ∆ cioè una differenza; dato il valore statico di camber ad esempio -3.0° la variazione cinematica si ottiene come differenza tra il valore statico e quello ottenuto nel moto della ruota con una escursione pari a ±40mm.
Figura 2.8. Definizione dell’angolo di camber.
Se si prova una ruota con pneumatico con angolo di deriva nulla e coppia nulla, ma con un certo angolo di camber γ >0, si rileva una spinta trasversale Fy< 0 passante
per O (il momento Mz risulta nullo). Questa forza laterale è detta spinta di camber; la sua
variazione è legata al valore dell’angolo di camber.
Figura 2.9. Influenza del Camber e variazione della spinta di camber al variare dell’angolo di deriva.
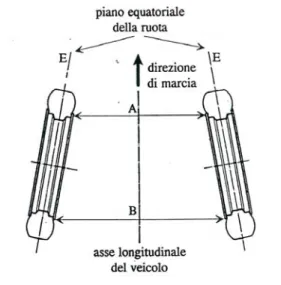
2.12 Convergenza -Divergenza (Toe in – Toe out) La convergenza della ruota è l’angolo formato dal piano equatoriale della ruota con l’asse longitudinale della vettura vista in pianta. Spesso il valore della convergenza è espresso in mm; questo è ottenuto dalla differenza delle distanza [in mm] dai cerchi ruota rispettivamente dietro e davanti al mozzo ( figura 2.10). Le due misure vengono rilevate ad una altezza da terra pari a metà ruota (all’altezza del mozzo).
Figura 2.10. Determinazione del valore della Convergenza-Divergenza in millimetri.
La convergenza si dice positiva se la distanza B è maggiore di A; se invece la distanza di B è minore di A, la convergenza si dice negativa e si parla in tal caso di divergenza. La convergenza è nulla se le distanze A e B sono uguali. La regolazione della convergenza, si veda la Figura 2.9. può essere usata per superare le difficoltà di manovra e migliorare dunque la maneggevolezza della vettura. Una divergenza sulle ruote posteriori può essere usata per migliorare la sterzatura in curva. Quando la vettura è in curva, il trasferimento di carico aggiunge maggior carico alla ruota esterna e l’effetto è di un sovrasterzo. La quantità di convergenza statica sull’asse anteriore dipenderà da vari fattori quali l’angolo di camber (-3°), la geometria di sterzatura di Ackermann, dalla sterzata in rollio e dalla precisione dello sterzo. Un minore angolo di convergenza statica è desiderabile per ridurre la resistenza al rollio e un surriscaldamento indesiderato dei pneumatici e del loro consumo causato dal fatto che le gomme si trovano così a lavorare una contro l’altra. Altra problematica connessa all’angolo di convergenza è il bump-steer, ovvero la variazione delle caratteristiche di sterzatura del veicolo durante il moto relativo della cassa rispetto agli pneumatici. La variazione di convergenza durante il moto della cassa è unicamente determinata dalla posizione delle estremità (regolabili tramite spessori o eccentrici) dei tiranti di sterzo all’anteriore e dei tiranti di convergenza al posteriore. Su entrambi gli assali si tende a minimizzare il bump-steer in quanto non sarebbe il pilota a controllare pienamente la vettura.
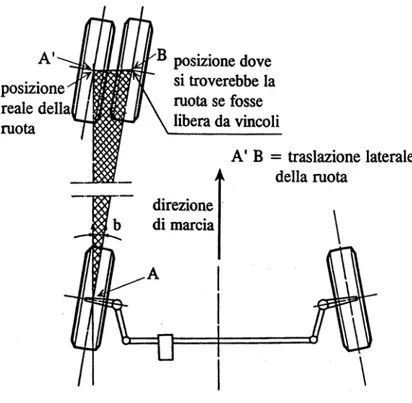
La figura sottostante mostra come la convergenza influenzi la traiettoria e il consumo del pneumatico.
Figura 2.11. Influenza della Convergenza sul moto della ruota.
La convergenza viene stabilita dal progettista ad un valore tale da essere circa zero nelle condizioni medie d’uso della vettura. Tale valore non rimane costante durante l’escursione della ruota, ma può variare anche notevolmente, a seconda dello schema cinematico delle sospensioni. A grandi linee si può dire che :
• Le ruote anteriori o posteriori non motrici hanno una convergenza positiva a veicolo fermo.
• Le ruote anteriori o posteriori motrici hanno una convergenza negativa a veicolo fermo.
Tutto ciò viene fatto per avere nelle normali condizioni d’uso una convergenza il più possibile nulla perché ciò porta ad una usura regolare del pneumatico.