Capitolo 6
La validazione del simulatore
In questo capitolo viene definito il modo in cui è stato validato il simulatore, in più viene fornita una breve descrizione degli studi utilizzati come riferimento:
• SVS: Stereo Vision System [5]
• MIV: Manoeuvring of a Servicing/Inspection Vehicle [6]
Gli studi suddetti sono stati analizzati al fine di acquisire conoscenza sui tipi di manovra utilizzabili nel rendez-vous.
6.1 MIV
MIV è uno studio operato da Alenia Aerospazio in collaborazione con Fokker Space e Institute of Automation of the University of Denmark. Lo studio è dedicato alla realizzazione di un simulatore di supporto al progetto dei sottosistemi di bordo e di terra, richiesti per l’ispezione e il servizio ad uno spacecraft geostazionario non-cooperativo. Le principali aree di intervento previste per il veicolo di servizio sono in generale le seguenti:
• Intervento meccanico
• Eventuali “reorbiting” dello spacecraft
Per quanto concerne le fasi coperte dal simulatore:
• Partenza del veicolo di servizio (chaser) dalla propria orbita di parcheggio e successivo rendez-vous col target.
• Ispezione del target
• Sincronizzazione
• Approccio finale e sviluppo dell’aggancio
Quanto detto sopra evidenzia l’importanza del rendez-vous all’interno di MIV, e la conseguente necessità di riservare ad essa un ampia trattazione. La documentazione a disposizione ha infatti permesso l’acquisizione di informazioni relative alle manovre tipicamente usate nella fase intermedia e terminale del rendez-vous su orbita geostazionaria, garantendo una solida base di partenza per lo sviluppo della teoria esplicitata nel capitolo 4.
MIV ha costituito un punto di riferimento e confronto grazie ai diagrammi riportati nella documentazione a disposizione. Essi hanno infatti consentito la comprensione di ogni tipo di manovra trattata, costituendo al tempo stesso un valido raffronto per la verifica della correttezza dell’intera traiettoria ottenuta (e quindi non solo dei valori finali di posizione e velocità) e dell’andamento di posizione e velocità in funzione del tempo.
Anche in Stereo Vision System si ripropone il problema del rendez-vous, applicato come nel caso precedente ad un’orbita geostazionaria. In questo caso la documentazione disponibile fornisce solo risultati di tipo numerico, per ogni manovra simulata. E’ molto importante considerare che per il prototipo SVS, la pianificazione di missione è completamente affidata ad un programma separato e denominato PLANNER. Questo programma è infatti incaricato di calcolare le manovre orbitali nominali per muovere il chaser relativamente al target. In SVS è a sua volta presente un modulo guidance avente il compito di leggere gli output generati da PLANNER, contenenti il profilo ideale della traiettoria descritti in termini di posizione e velocità relative, e le variazioni di velocità richieste. In più questo modulo trasforma le variazioni di velocità in forze da applicare al chaser, compatibilmente con la validità degli attuatori.
6.2.1 PLANNER
PLANNER è un programma realizzato per la pianificazione delle manovre di rendez vous. I calcoli per le manovre sono basati sulle equazioni linearizzate (si trascurano gli elementi di ordine superiore al primo) del moto relativo (CW). Le manovre simulate sono elencate di seguito:
• Free drift/station keeping
• Trasferimento alla Hohmann
• Trasferimento tangenziale continuo
• Hopping radiale impulsivo lungo la V-bar (asse x in LVLH)
• Hopping radiale continuo lungo la V-bar
• Forced motion lungo V-bar
• Trasferimento fra due punti impulsivo
• Applicazione di impulso di velocità
Nella documentazione sono inoltre riportati i risultati numerici relativi alle manovre suddette. E’ infatti riportata un’applicazione di PLANNER su un’operazione di rendez-vous nelle sua fase intermedia e terminale. La simulazione svolta, come precedentemente menzionato, non tiene conto delle perturbazioni, è stato quindi possibile utilizzarne i dati. Di seguito viene mostrato un semplice esempio di quanto appena detto.
6.3 Validazione in orbita circolare
Allo scopo di chiarire in modo esaustivo il tipo di validazione utilizzato, andiamo ad esaminare una manovra campione. La manovra scelta per l’esempio di convalidazione è il forced motion. I dati di ingresso di SVS vengono immessi come input nel programma, dopo di che si confrontano gli output ottenuti con quelli riportati sui documenti di SVS.
INPUT Componente x Componente z [m]
Posizione iniziale -69.907393 [m] 0.081789 [m] Velocità iniziale 0.000012 [m/s] 0.000001 [m/s] Posizione finale -5 [m] 0 [m] Velocità finale 0 [m/s] 0 [m/s] Velocità massima 0.003 [m/s] 0 [m/s] Durata manovra 25000 [s] Istante iniziale 93682 [s] Massa iniziale 4399,76 [Kg]
I risultati ottenuti a seguito della simulazione sono i seguenti
OUTPUT Componente x Componente z [m]
Posizione finale -4.9472 [m] 0.1785162 [m] Velocità finale -0.184∙10-5 [m/s] 0.648∙10-5 [m/s]
Consumo carburante 0.033 [kg]
Durata tempo accelerazione 3364.2 [s] Durata tempo di drift 3364.2 [s] Durata tempo frenata 18271.8 [s]
Tabella 6.2: Risultati ottenuti tramite simulatore
OUTPUT Componente x Componente z [m]
Posizione finale -4.811795 [m] -0.008863 [m] Velocità finale -0.000001 [m/s] -0.000006 [m/s]
Consumo carburante 0.029 [kg]
Durata tempo accelerazione 3364.2 [s] Durata tempo di drift 3364.2 [s] Durata tempo frenata 18271.8 [s]
Tabella 6.3: Risultati ottenuti tramite PLANNER (riportati in SVS.doc)
Confrontando i valori delle tabelle 6.2 e 6.3 è possibile notare che l’entità delle differenze riscontrate è trascurabile. E’ quindi consentito convalidare i risultati ottenuti dal simulatore per la manovra di forced motion. Per tutte le altre manovre il procedimento è analogo.
6.4
Validazione in orbita ellittica
La simulazione delle manovre specifiche per il rendez vous operata in orbita ellittica costituisce un’innovazione, di conseguenza non esistono riferimenti con cui confrontare
• Prese in esame le equazioni relative al caso ellittico viene inserito da input un’eccentricità pari a 0, in modo tale da riprodurre il caso particolare circolare. La convalidazione viene attuata per confronto con i risultati di SVS.
• Dopo aver verificato il funzionamento per e=0 viene inserita un’eccentricità compresa tra 0 e 1; la convalidazione è attuata confrontando i valori di posizione e velocità finali ottenuti in simulazione con quelli richiesti da input. Se coincidono significa che gli impulsi/accelerazioni calcolati sono corretti. Per quanto riguarda la forma della traiettoria seguita dal chaser durante la manovra, può essere giudicata corretta nel caso in cui si presenti con forma molto simile all’analoga del caso circolare.
Di seguito mostriamo un esempio di validazione applicata all’hopping impulsivo radiale. I parametri orbitali sono quelli dell’orbita geostazionaria, in tabella sono riportati soltanto l’eccentricità e il semiasse maggiore.
Tabella 6.4: Input di SVS inseriti nel simulatore sezione ellittica
I risultati ottenuti a seguito della simulazione sono i seguenti
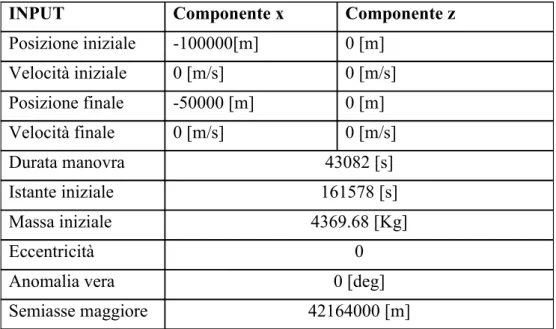
OUTPUT Componente x Componente z [m] INPUT Componente x Componente z
Posizione iniziale -100000[m] 0 [m] Velocità iniziale 0 [m/s] 0 [m/s] Posizione finale -50000 [m] 0 [m] Velocità finale 0 [m/s] 0 [m/s] Durata manovra 43082 [s] Istante iniziale 161578 [s] Massa iniziale 4369.68 [Kg] Eccentricità 0
Anomalia vera 0 [deg]
Posizione finale -50025 [m] 3 [m] Velocità finale -0.0005[m/s] 0.003 [m/s]
Consumo carburante 1.1796 [kg]
Durata manovra 43082 [s]
Variazione totale di velocità 1.823 [m/s]
Tabella 6.5: Risultati ottenuti tramite simulatore
OUTPUT Componente x Componente z [m]
Posizione finale -50000 [m] 0.000001 [m]
Velocità finale 0[m/s] 0[m/s]
Consumo carburante 1.1796 [kg]
Durata manovra 43082 [s]
Variazione totale di velocità 1.823 [m/s]
Tabella 6.6: Risultati ottenuti tramite PLANNER (riportati in SVS.doc)
I risultati sono confermati dai dati di SVS (vedi tab.6.5 e 6.6). Il secondo passo della convalidazione prevede come detto una verifica indiretta, ovvero un confronto fra gli output desiderati e quelli effettivamente ottenuti. In questo caso viene ipotizzata un’orbita ellittica intorno alla terra, gli input immessi sono i seguenti
INPUT Componente x Componente z [m]
Posizione iniziale -100000[m] 0 [m] Velocità iniziale 0 [m/s] 0 [m/s] Posizione finale -50000 [m] 0 [m] Velocità finale 0 [m/s] 0 [m/s] Durata manovra 43082 [s] Istante iniziale 161578 [s] Massa iniziale 4369.68 [Kg] Eccentricità 0.24 Semiasse maggiore 42164000 [m]
Tabella 6.7: Input inseriti nel simulatore sezione ellittica
L’orbita ellittica ipotizzata permette di ottenere i seguenti valori di output:
OUTPUT Componente x Componente z [m]
Posizione finale -50005 [m] 36 [m] Velocità finale 0.0036 [m/s] 0.0112 [m/s]
Consumo carburante 2.3447 [kg]
Durata manovra 43082 [s]
Variazione totale di velocità 3.6248 [m/s]
Tabella 6.8: Risultati ottenuti tramite simulatore
Confrontando i valori di posizione e velocità finali tabulate in 6.8 con quelli riportati in tabella 6.7 non si rilevano elevate differenze, dato che anche l’andamento della traiettoria (fig.6.9) è molto simile alla corrispondente del caso circolare è possibile affermare che il programma simula correttamente la manovra di Hopping ellittico. Questo procedimento è stato adottato in modo del tutto analogo anche per tutte le altre manovre.
Capitolo 7
I risultati
Nel presente capitolo vengono descritti due esercizi di simulazione. Gli scenari utilizzati si riferiscono alla missione di Mars Sample Return, e in particolar modo ai due casi di contingency affrontabili:
• Mancata circolarizzazione dell’orbita del target.
• Rischio di collisione col target.
Come definito nella prima parte della relazione, la possibilità di una mancata circolarizzazione dell’orbita costringe il chaser a dover operare un rendez vous su orbita ellittica. In conseguenza di ciò l’AMM deve selezionare un opportuno piano tra quelli precaricati a terra. Anche per il rischio di collisione è necessaria una riprogrammazione delle attività previste. L’AMM comanda quindi una CAM, anch’essa preparata a terra. I risultati delle simulazioni attuate sono così organizzati:
• Simulazione della fase terminale di un rendez-vous su orbita ellittica intorno a Marte (i parametri orbitali sono stati presi dalle documentazioni relative a MSR).
• Simulazione di una strategia di CAM. In questo caso si è riportato l’esempio di un errore avvenuto sul primo impulso di un Hopping radiale con conseguente rischio di collisione col target.
Nelle applicazioni sotto riportate la sequenza di manovre è stata scelta in modo tale da evidenziare le potenzialità del programma e senza tener conto dell’effettiva realizzabilità. A tale scopo è stata scelta una sequenza composta sia da manovre impulsive che continue.
7.1 Rendez-vous su orbita ellittica intorno a Marte
Il caso considerato si applica alla missione di MSR, supponendo però di non andare ad ultimare l’operazione con cattura (vedi capitolo 2), ma tramite aggancio con lo spacecraft contenente il campione (target). Questa scelta esige quindi una preliminare ispezione del target tramite manovra di fly around.
7.1.1 Dati di ingresso
Di seguito riportiamo i dati relativi all’orbita del target e alle condizioni di partenza del chaser.
Tabella 7.1: Scenario esaminato DATI del TARGET
Raggio di Marte [Km] 3397.2
Quota periasse [Km] 217.9
Quota apoasse [Km] 510
Anomalia vera [deg] 0
Massa del Chaser [Kg] 2000
Le quote di periasse e apoasse elencate in tabella 7.1 definiscono l’orbita scelta dall’ESA come caso di contingency da esaminare. Per ricavare gli input da immettere nel programma è sufficiente calcolare il valore di semiasse maggiore ed eccentricità come sotto riportato.
(
)
(
)
+
=
−
⋅
+
=
+
⋅
9
.
217
2
.
3397
1
510
2
.
3397
1
e
a
e
a
=
=
⇒
0388
.
0
2
.
3761
e
a
Figura 7.1: Rendez-vous su orbita ellittica (caso di contingency)
7.1.2 La fase terminale
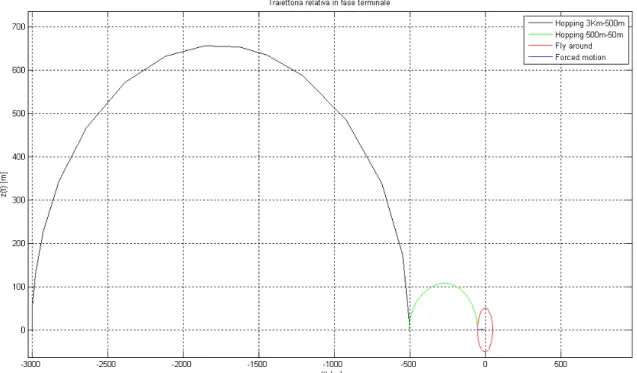
La fase terminale ha inizio quando il chaser si trova sull’orbita del target ad una distanza minore o uguale a tre chilometri. Di seguito sono elencate le manovre simulate e i risultati ad esse relativi.
2) Hopping continuo radiale da -500m a -50m 3) Fly around di 360° intorno al target
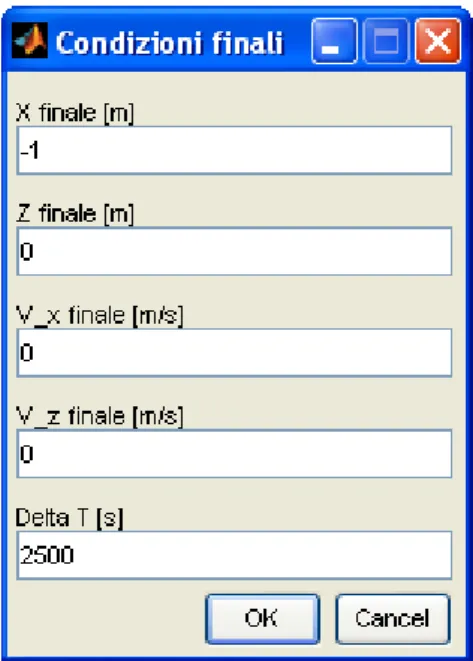
4) Forced Motion da -50m a -1m
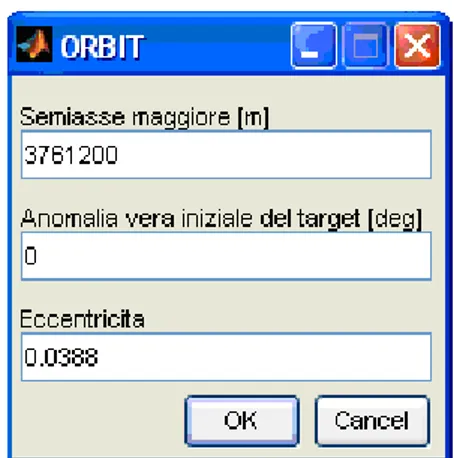
Figura 7.2: Input veicolo/pianeta Figura 7.3:Parametri orbitali del target
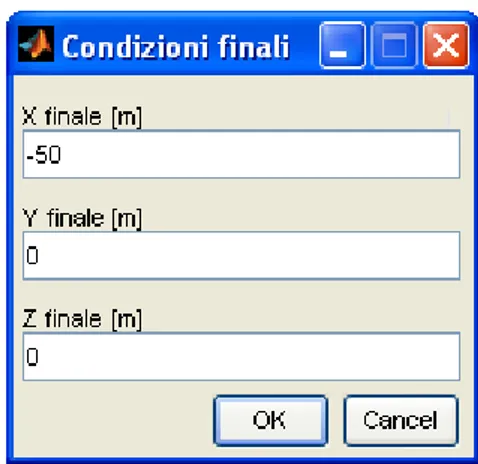
Figura 7.5: Condizioni finali imposte al chaser nel hopping 3Km-500m
Figura 7.7: Condizioni finali imposte per eseguire fly around
Figura 7.9: Traiettoria relativa del chaser rispetto al target in fase terminale
Figura 7.11: Andamento del consumo di carburante nel tempo
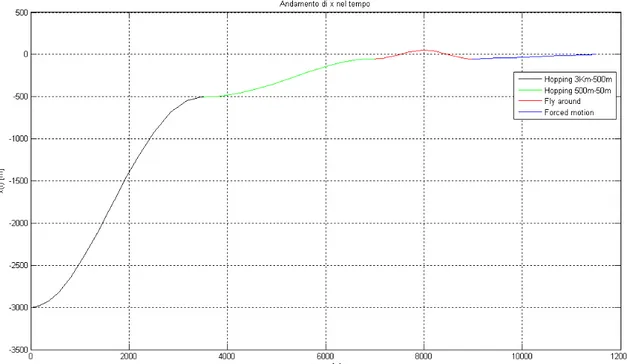
Figura 7.13: Andamento di z nel tempo
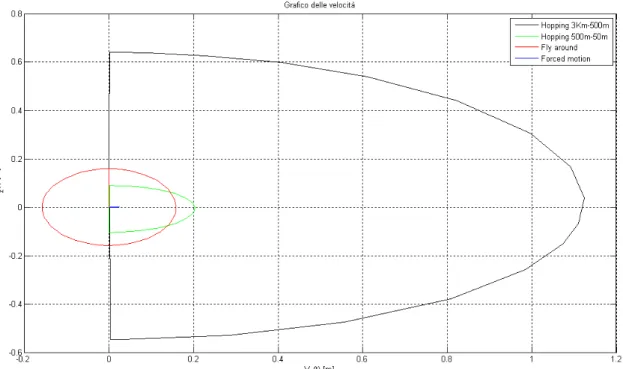
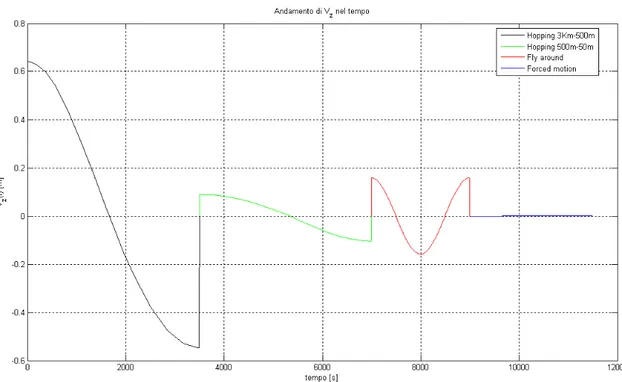
Figura 7.15: Andamento della Vx nel tempo
1) Hopping impulsivo radiale
Di seguito sono riportati i dati numerici ottenuti dalla simulazione della manovra di hopping in avvicinamento da -3Km a -500m:
Tabella 7.2: Dati numerici 1, Hopping 3Km-500m
Tabella 7.3: Dati numerici 2, Hopping 3Km-500m
2) Hopping impulsivo radiale
Di seguito sono riportati i dati numerici ottenuti dalla simulazione della manovra di hopping in avvicinamento da -500m a -50m 1
V
∆
[m/s]∆
V
2[m/s] finale [m]Posizione Velocità finale [m/s]x
0
0
−
499
.
25
0
.
0016
z
0
.
64
0
.
55
0
.
97
0
.
0084
MANt
∆
[s]∆
t
MIS [s]M
T [Kg]M
C_MAN [Kg]M
C_MIS [Kg]3
.
3501
3501
.
3
1999
.
2
0
.
7681
0
.
7681
1
V
∆
[m/s]∆
V
2[m/s] finale [m]Posizione Velocità finale [m/s]Tabella 7.4: Dati numerici 1, Hopping 500m-50m
Tabella 7.5: Dati numerici 2, Hopping 500m-50m
3) Fly around
Di seguito sono riportati i dati numerici ottenuti dalla simulazione della manovra di fly around intorno al target per 360°. Nella 7.1 è stata riportata la variazione di velocità accumulata durante la fase di accelerazione continua, mentre in tab.7.6 sussistono i valori degli impulsi di inizio e fine manovra.
Tabella 7.6: Dati numerici 1, Fly around
ACC
V
∆
=0
.
5694
[m/s] (6.1)Tabella 7.7: Dati numerici 2, Fly around
MAN
t
∆
[s]∆
t
MIS [s]M
T [Kg]M
C_MAN [Kg]M
C_MIS [Kg]3
.
3501
7002
.
5
1999
.
1
0
.
1236
0
.
8917
1
V
∆
[m/s]∆
V
2[m/s] Posizione finale [m] Velocità finale [m/s]x
−
0
.
0000
0
.
0000
−
51
.
0453
0
.
9248
⋅
10
−3z
0
.
1621
0
.
1625
0
.
7364
0
.
3112
⋅
10
−3MAN
t
∆
[s]∆
t
MIS [s]M
T [Kg]M
C_MAN [Kg]M
C_MIS [Kg]2000
9002
.
5
1998
.
5
0
.
5783
1
.
4699
4) Forced motion
Di seguito sono riportati i dati numerici ottenuti dalla simulazione della manovra di forced motion da -50m a -1. In tabella 7.9 sono riportati i moduli delle variazioni di velocità accumulate rispettivamente nelle fasi di accelerazione (ΔVA), free drift (ΔVB) e
frenata (ΔVC) della manovra.
Tabella 7.8: Dati numerici 1, Forced motion
Tabella 7.9: Dati numerici 2, Forced motion
Tabella 7.10: Dati numerici 3, Forced motion
7.2 Rischio di collisione col target
Posizione finale [m] Velocità finale [m/s]
∈
MAXV
[0.0185-0.0225][m/s]x
−
1
.
3757
0
.
0024
0
z
1
.
2831
0
.
0003
0
.
021
AV
∆
[m/s]∆
V
B[m/s]∆
V
C[m/s]3118
.
0
0
.
0812
0
.
0188
MANt
∆
[s]∆
t
MIS [s]M
T [Kg]M
C_MAN [Kg]M
C_MIS [Kg]2500
11502
.
5
1998
.
2
0
.
26
1
.
7299
Come illustrato nel capitolo 5, il simulatore dà la possibilità di modificare i dati calcolati dal programma. Questa funzionalità permette di simulare eventuali anomalie e favorisce la realizzazione di piani di missione alternativi. Di seguito utilizzeremo il programma in questo modo, andando a simulare un errore sulla prima manovra di hopping (manovra n.1 della fase terminale), e successivamente a ripianificare per far fronte alla situazione di emergenza (supposto rischio di collisione col target). Nella figura sottostante è raffigurata la manovra nominale, tracciata in azzurro, in concomitanza con la manovra errata, tracciata in rosso.
Figura 7.17: Rappresentazione di anomalia sul modulo di impulso in hopping
Nel hopping la traiettoria del chaser è interamente determinata dall’entità del primo impulso, mentre la seconda variazione di velocità ha solamente il compito di conferire al chaser la velocità finale desiderata. Sulla base di tali premesse, innanzi ad un’anomalia sul primo impulso (volutamente settata sul valore di collisione), abbiamo la collisione del chaser. A tale scopo serve una ripianificazione nella sequenza di manovre previste. Nell’esempio sotto riportato simuliamo la semplice applicazione di un impulso un quarto di periodo orbitale prima dell’impatto, allo scopo di evitare la
variazione di velocità); successivamente un trasferimento fra 2 punti riporterà il chaser sulla traiettoria nominale.
La simulazione dell’errore sulla manovra di hopping 3Km-500m tale da condurre il chaser alla collisione col target (3Km-0m), può essere realizzata come di seguito indicato:
1) Inserimento dati relativi alla manovra di hopping 3Km-0m (i dati di input sono raffigurati in fig. 7.2-7.4, 7.18). La manovra suddetta viene simulata per conoscere il valore di collisione dell’impulso da applicare (7.1).
Figura 7.18: Condizioni finali imposte per conoscere impulso anomalo
=
∆
76
.
0
0
00
.
0
COLLV
[m/s] (7.1)2) Simulazione della seguente sequenza di manovre: a) Hopping 3Km-500m (fig.6.2-6.5).
b) Apply ΔV
c) Trasferimento fra 2 punti
a) Simulare la manovra e successivamente scegliere l’opzione “Introduci anomalie” impostando ΔV1,z sul valore di collisione. L’istante di fine simulazione deve essere sufficientemente inferiore a quello di fine manovra per evitare la collisione (vedi fig.
7.19), in questo particolare caso è stata scelta una durata di simulazione pari ad un quarto di periodo orbitale; i dati in rosso sono quelli modificati rispetto al caso nominale ( hopping 3Km-500m).
Figura 7.19: Inserimento anomalie
Tabella 7.11: Posizione e velocità finale del chaser dopo hopping anomalo
Tabella 7.12: Dati numerici hopping anomalo
Posizione finale [m] Velocità finale [m/s]
x
−
1498
.
4
1
.
3482
z
750
.
4
−
0
.
0001
MANt
∆
[s]∆
t
MIS [s]M
T [Kg]M
C_MAN [Kg]M
C_MIS [Kg]1750
1750
1999
.
52
0
.
49
0
.
49
b) Applicazione di un impulso di velocità in verso opposto al moto del chaser (fig. 7.19). Questa manovra viene applicata per allontanare il chaser dal target ed evitarne quindi lo scontro.
Figura 7.20: Applicazione variazione di velocità
Tabella 7.13: Posizione e velocità finale del chaser dopo applicazione ΔV
Tabella 7.14: Dati numerici apply Dv
c) Infine deve essere eseguito un trasferimento tra 2 punti per riportare il chaser nella posizione che avrebbe dovuto raggiungere in assenza di anomalie.
Posizione finale [m] Velocità finale [m/s]
x
300
.
3
0
.
4877
z
384
.
3
−
0
.
2615
MANt
∆
[s]∆
t
MIS [s]M
T [Kg]M
C_MAN [Kg]M
C_MIS [Kg]2000
3750
1999
.
39
0
.
13
0
.
62
Figura 7.21: Condizioni finali imposte per il trasferimento fra 2 punti
Tabella 7.15: Dati numerici 1 di trasferimento fra 2 punti
Tabella 7.16: Dati numerici 2 di trasferimento fra 2 punti
1
V
∆
[m/s]∆
V
2 [m/s] Posizione finale [m] Velocità finale [m/s]x
0
.
1190
0
.
0789
−
482
.
8
0
.
0078
z
−
0
.
0939
−
0
.
4487
4
.
9
−
0
.
0019
MANt
∆
[s]∆
t
MIS [s]M
T [Kg]M
C_MAN [Kg]M
C_MIS [Kg]3501
7251
1998
.
99
0
.
39
1
.
01
Figura 7.22:Traiettoria CAM
Nell’esempio è stato assunto un errore sull’impulso tale da far collidere il chaser col target, il programma è tuttavia utilizzabile anche per pianificare correzioni a fronte di differenti tipi di collisione (ad esempio con un asteroide in un generico punto espresso in coordinate TOCS). In generale il simulatore può essere utilizzato per qualsiasi genere di riprogrammazione, indipendentemente che ci sia un rischio di collisione o meno. Inoltre, per favorire il lavoro di chi pianifica la traiettoria, è possibile visualizzare l’andamento della traiettoria del chaser in funzione dell’errore sull’impulso/accelerazione applicata, in questo modo l’utente può subito farsi un’idea dell’impatto dell’errore sulla traiettoria del satellite. In figura 7.24 è riportato un esempio di quanto appena detto, ovvero un diagramma correlante la traiettoria di un hopping continuo in orbita circolare col modulo della accelerazione (ovviamente il modulo corrisponde alla componente z dell’accelerazione).
Capitolo 8
Conclusioni e possibili sviluppi futuri
Il programma realizzato risponde perfettamente al requisito di agilità richiesto, il ridotto numero di input permette infatti una rapida immissione dei dati iniziali. Inoltre il congiunto utilizzo delle equazioni di Clohessy-Wiltshire (soluzione in forma chiusa per orbita circolare) e di quelle di Koji-Yamanaka (caso ellittico), permette di ridurre sensibilmente i tempi computazionali (le Koji-Yamanaka funzionano anche per orbite circolari ma comportano tempi di calcolo più lunghi) senza tuttavia ledere alla precisione dei risultati.
Lo strumento realizzato è utilizzabile per qualsiasi tipo di rendez-vous orbitale. Il passaggio da uno scenario all’altro è facilmente conseguibile tramite semplice variazione degli input di missione (capitolo 5), ovvero i dati caratterizzanti orbita, corpo celeste considerato e chaser (satellite inseguitore).
La componente innovativa del lavoro è costituita dalle metodologie di calcolo sviluppate nel caso di orbita ellittica. Esse hanno infatti permesso di calcolare le forzanti necessarie per la corretta simulazione delle seguenti manovre :
• Trasferimento tra due punti
• Hopping radiale impulsivo
• Hopping radiale continuo
• Fly Around
• Applicazione
ΔV
Un futuro sviluppo del simulatore dovrà essere orientato verso l’ottimizzazione dei consumi di carburante sull’intera durata della missione e sulla determinazione automatica di configurazioni di missione realizzabili (es: si potrebbero inserire dei vincoli tali da scartare automaticamente le sequenze di manovre non compatibili col sistema propulsivo a disposizione). Dovranno inoltre essere realizzate delle interfacce opportune, in modo da consentire di passare i dati ottenuti ad un simulatore di traiettoria già esistente in Alcatel Alenia Space, per una simulazione che sia comprensiva degli effetti dovuti ai disturbi (ES: pressione solare, influenza gravitazionale dei pianeti vicini, etc.).
Appendice A
Trasformazioni di coordinate
A.1 Da coordinate target LVLH a coordinate TOCS
Il tipo di coordinate scelto per definire il vettore stato relativo è quello nel quale sono scritte le equazioni di Clohessy-Wiltshire. Il vettore di stato scritto in coordinate TOCS è definito nella relazione A.1, laddove il significato delle componenti è spiegato nella figura sottostante.
(
)
T TOCS TOCS TOCS TOCS TOCS TOCSy
z
x
y
z
x
X
ˆ
=
,
,
,
,
,
(A.1),
=
LVLH LVLH LVLHz
y
x
r
(A.2)Partiamo dal vettore relativo menzionato in A.2 localizzando il chaser nel riferimento solidale col target LVLH (LVLH ha l’asse z lungo la verticale locale, diretta verso Marte; l’asse x giacente sul piano orbitale, normale alla verticale locale e positiva nella direzione della velocità orbitale; l’asse y completa la terna). Con riferimento alla figura A.1 abbiamo:
R
r
z
y
y
R
x
TOCS LVLH TOCS TOCS−
=
−
=
=
*
ϑ
(A.3)Dove R è il modulo dell’omonimo vettore rappresentato in figura A.1., ovvero la proiezione del raggio istantaneo dell’orbita del chaser sul piano orbitale del target:
(
)
2 2*
LVLH LVLHr
z
x
R
=
+
−
(A.4)θ è l’angolo fra il raggio istantaneo dell’orbita del target Rt e il vettore rc
−
=
− LVLH LVLHz
r
x
*
tan
1ϑ
(A.5)Le seguenti trasformazioni consentono di tradurre le velocità scritte in coordinate LVLH in coordinate TOCS:
(
)
(
)
LVLH LVLH TOCS LVLH TOCS LVLH LVLH TOCSz
x
z
y
y
z
x
x
⋅
+
⋅
=
−
=
−
+
+
=
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
cos
sin
cos
sin
sin
cos
(A.6)A.2 Da coordinate TOCS a coordinate LVLH
Le seguenti relazioni consentono di trasformare le coordinate e le velocità TOCS in coordinate e velocità LVLH.
Supposto dato il vettore di stato in coordinate TOCS (A.1). Il vettore relativo localizzante il chaser e scritto in coordinate LVLH è ricavabile come di seguito:
(
)
⇒
=
x
LVLHy
LVLHz
LVLHr
,
,
−
=
−
=
=
ϑ
ϑ
cos
*
sin
R
r
z
y
y
R
x
LVLH TOCS LVLH LVLH (A.8) dove: TOCSz
r
R
=
*
−
e(
TOCS)
TOCSz
r
x
−
=
*
ϑ
Le trasformazioni per le velocità sono quindi date da:
(
)
(
)
TOCS TOCS LVLH TOCS LVLH TOCS TOCS LVLHz
x
z
y
y
z
x
x
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
ϑ
cos
sin
sin
sin
cos
cos
+
+
⋅
=
−
=
−
+
⋅
=
(A.9)Appendice B
La velocità massima
del forced motion
Come menzionato nel capitolo 4, uno degli input che l’utente deve immettere per far si che il programma simuli correttamente il forced motion, è la vx,MAX.
Il valore di questo input deve essere compreso tra due estremi calcolati dal programma e visualizzati al momento dell’inserimento del dato numerico. La presente sezione ha il compito di definire la logica seguita per la valutazione dei due estremi (Sup e Inf). Dalla (4.24), rappresentante la relazione esistente tra la durata in secondi della fase di accelerazione e la vx,MAX , si ricava uno degli estremi dell’intervallo di validità della vx,MAX imponendo Δta >0.
(
)
[
(
)
]
(
)
(
)
(
t
)
x
x
v
v
v
v
v
v
v
x
x
t
v
v
v
t
f MAX x x MAX x f x MAX x x MAX x f MAX x x MAX x a∆
−
>
>
⇒
>
−
+
−
−
−
∆
−
=
∆
0 , 0 , , 2 , , 2 0 , , 0 , 0 , ,0
,
2
(
)
⇒
∆
−
>
t
x
x
v
f x 0 0 , Inf=v
x,0(
)
⇒
∆
−
<
t
x
x
v
f x 0 0 , Inf=(
)
t
x
x
f∆
−
0Laddove per Inf si intende l’estremo inferiore dell’intervallo entro il quale deve stare
vx,MAX. L’estremo superiore è ricavabile imponendo la seguente relazione:
(
+
∆
)
−
∆
(
)
<
ε
∆
t
av
x,MAXv
x,MAXt
av
x,MAX (B.1) Laddoveε
<<1 e∆
v
x,MAX=costanteFigura B.1: Andamento di Δta rispetto a vx,MAX
Figura B.2: Zoom di figura B.1 corrispondente al riquadro in rosso
La figura B.1 mostra come la durata della fase di accelerazione tenda ad un asintoto al crescere della velocità massima ammissibile. Per vx,MAX > Sup (B.1) è sempre
soddisfatta. In figura B.2 sono rappresentati gli estremi Inf e Sup relativi alla manovra di forced motion da -50m a -1m dal target su orbita ellittica intorno a Marte.