Capitolo 8: Analisi dei risultati sperimentali
Introduzione
Le misure realizzate sono volte ad individuare la morfologia del segnale fornito dai sensori e ad accertare l’adeguatezza dell’elettronica realizzata per interfacciarsi con essi. A questo scopo, lo stimolo meccanico applicato ai sensori è un gradino di durata finita e di ampiezza fissata.
Trovare una relazione matematica che legasse ingresso meccanico ed uscita elettrica avrebbe richiesto un lavoro molto lungo e complesso, che esula dagli scopi del presente lavoro di tesi. Infatti, un’analisi approfondita sugli sforzi a cui sono sottoposti i sensori implicherebbe misure ben più vaste e delicate, che comprendono sforzi di allungamento e compressione sia longitudinale che trasversale, schiacciamento, torsione, etc., e stimoli con diversa forma d’onda, come impulsiva, triangolare, a dente di sega, sinusoidale.
È stato ricavato un modello di prima approssimazione a parametri concentrati: è un tentativo di fornire uno strumento predittivo, utile per lo studio approfondito della risposta.
8.1 Setup sperimentale
La descrizione dell’apparato di test è al paragrafo 7.4: in breve, il tessuto sensorizzato è messo in opera su un supporto girevole a forma di testa umana (figura 8.1):
Figura 8.1
Un servomotore movimenta un’asta metallica (figura 8.2) che con un’estremità, isolata elettricamente, esercita una pressione, con le modalità descritte in seguito, sul sensore preso in esame.
Figura 8.2
È stata condotta una sessione comprendente due esperimenti, diversi dal punto di vista della durata della sollecitazione meccanica del film piezoresistivo, per indagare sull’uniformità della risposta. Le prove di misure sui sensori sono state svolte regolando, tramite l’interfaccia grafica in LabVIEW di figura 7.5, i vari parametri elettrici, temporali e meccanici secondo i passi indicati nel paragrafo 7.2.1.
8.2 Descrizione degli esperimenti
Sono stati eseguiti, per ogni sensore, due serie di esperimenti: la prima con 150 TOUCH e la seconda con 50 TOUCH con temporizzazione diversa da quella della prima serie. Ogni TOUCH è caratterizzato da due fasi: PUSH e RELEASE. Il
PUSH ha una durata pari a TPUSH, e corrisponde al tempo in cui l’asta connessa al
servomotore è spinta da questo contro il sensore. Il RELEASE ha una durata pari a
TRELEASE, ed è la fase in cui non è esercitata pressione sul sensore, che si trova
perciò in condizione di riposo. Al termine del RELEASE è eseguito il nuovo
PUSH del TOUCH successivo.
La prima serie ha un TRELEASE di 10sec e un TPUSH di 2sec.
La seconda serie ha un TRELEASE di 10sec e un TPUSH di 20sec.
8.3 Considerazioni sui dati sperimentali
In figura 8.3 è riportato l’andamento della tensione VOUT, prelevata ai capi
del sensore sotto misura, durante un singolo TOUCH.
VRELEASE MAX VPUSH MIN VPUSH MAX TPUSH TRELEASE VRELEASE MIN VRELEASE_MIN τRELEASE HL τPUSH HL t VOUT Figura 8.3
Osservando il singolo TOUCH, si può notare che all'inizio della fase di
VPUSH_MIN. All'inizio della fase di RELEASE la tensione VOUT sale quasi
istantaneamente al valore VRELEASE_MAX. Durante il tempo TRELEASE la tensione
VOUT decade pressochè esponenzialmente al valore VRELEASE_MIN. E’ possibile
notare che la fibra si comporta come un condensatore che si carica quasi istantaneamente all'innesco del PUSH e del RELEASE con costanti di tempo rispettivamente
τ
PUSH_LH eτ
RELEASE_LH (non riportate nel grafico per chiarezza) eche si scarica durante TPUSH e TRELEASE con costanti di tempo rispettivamente
τ
PUSH_HL eτ
RELEASE_HL.Per ogni TOUCH sono dunque individuabili almeno 8 features:
• VPUSH_MAX • VPUSH_MIN • VRELEASE_MAX • VRELEASE_MIN •
τ
PUSH_LH ≈ 0 •τ
PUSH_HL •τ
RELEASE_LH ≈ 0 •τ
RELEASE_HL <τ
PUSH_HLLe tensioni VOUT, misurate ai capi delle diverse fibre sensorizzate, hanno
andamenti simili. In figura 8.4a è riportato, a titolo di esempio, l’andamento della prima serie di misure per un singolo sensore.
Figura 8.4a
In figura 8.4b è visibile l’andamento della seconda serie per lo stesso sensore.
VOUT
t VOUT
t
Figura 8.4b
Questo tipo di visualizzazione permette di stimarne l’inviluppo, consentendo di valutare qualitativamente l’andamento delle prime quattro features sopra elencate.
VRELEASE_MIN seguono un andamento riconducibile in prima approssimazione ad
un esponenziale decrescente e si osserva che il decadimento di VPUSH_MAX,
VPUSH_MIN e VRELEASE_MAX è più marcato dell’andamento di VRELEASE_MIN, che invece
ha una deriva molto meno rilevante.
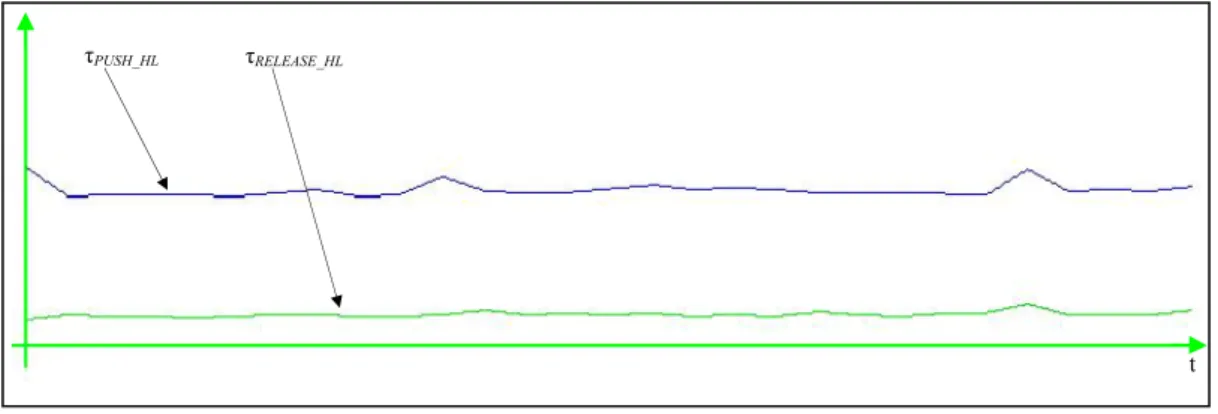
Nelle figure 8.6a e figura 8.3b sono riportati gli andamenti di
τ
PUSH_HL eτ
RELEASE_HL relativi alle due serie di misure per lo stesso sensore.Figura 8.6a: Andamenti delle
τ
nel tempo per la prima serie di misureτRELEASE_HL
τPUSH_HL
τPUSH_HL τRELEASE_HL
t t
Figura 8.6b: Andamenti delle
τ
nel tempo per la seconda serie di misureSi può notare che tali valori si mantengono pressoché costanti al passare dei TOUCH, ma la scarica sul RELEASE è sempre più veloce della scarica su
Le scariche durante i tempi TPUSH e TRELEASE sono solo in prima
approssimazione riconducibili ad esponenziali decrescenti. In realtà si osserva che la curva si appiattisce durante i tempi di scarica, presentando
τ
variabili, in particolare crescenti, all’aumentare della finestra temporale considerata per stimare leτ,
che ha VPUSH_MAX come punto fisso.Al passare dei TOUCH, l'inviluppo delle
τ
segue un esponenziale leggermente crescente, con un andamento comunque più stabile rispetto all’inviluppo delle tensioni VOUT.Gli inviluppi variabili al passare dei TOUCH potrebbero essere frutto di un deterioramento permanente della fibra di supporto al film piezoresistivo, del film stesso o di entrambi.
Il leggero aumento di
τ
PUSH_HL eτ
RELEASE_HL al passare dei TOUCH indicache, prima di arrivare a regime, durante i primi TOUCH a fibra “fredda”, il sistema risponde più velocemente per poi portarsi ai tempi di risposta a regime.
8.4 Modello
In figura 8.5 è mostrato un semplice schema elettrico che modellizza, in modo approssimativo, il comportamento del materiale piezoresistivo sottoposto ad una sollecitazione a gradino di durata finita, rappresentata dal generatore V1.
+ -+ - S2 S V3 + -+ -S1 S R2 R3 0 0 C1 0 V1 R1 IR1 IR2 Figura 8.5
I tasti S1 e S2, sincronizzati a V1 tramite V2 e V3, sono chiusi al fronte in
salita di V1 e si aprono contemporaneamente al fronte in discesa.
La risposta del materiale piezoresistivo, in figura 8.6, deve essere considerata come la sovrapposizione di due componenti riportate sulla stessa scala temporale:
Figura 8.6
La prima componente è data dalla corrente IR1 che scorre nella resistenza
R1, riportata in verde nel grafico di figura 8.6; la seconda componente è data dalla
corrente in IR2 che fluisce in R2, riportata in rosso.
Le costanti di tempo diverse dei due tratti esponenziali potrebbero essere dovute alla differente resistenza meccanica che presenta la fibra durante il PUSH e durante il RELEASE.
Come accennato nell’introduzione, gli esperimenti effettuati hanno permesso di indivuare un modello, ma non sono sufficienti a validarlo.