Aspetti Preliminari
Prima di affrontare l’esposizione del lavoro sperimentale compiuto durante lo stage, e l’analisi dei risultati ottenuti, `e necessario definire gli obiettivi della ricerca, i vincoli da imporre, il modello utilizzato, la relativa mesh, e la struttura generale della funzione costo. L’ultima sezione `e dedicata a un’analisi degli aspetti numerici coinvolti nel problema.
3.1
Obiettivi
Il primo argomento da affrontare `e la definizione degli obiettivi generali del-l’ottimizzazione; essi consistono, come gi`a evidenziato, nel miglioramento delle qualit`a di volo dell’aeromobile. Questo concetto — finora espresso in termini generici — si pu`o riassumere in due obiettivi fondamentali:
1. Diminuzione del CD: I vantaggi globali che deriverebbero da una diminuzione di resistenza aerodinamica del canard sono i seguenti:
• aumento (seppure lieve) della velocit`a a parit`a di potenza erogata dal propulsore;
• abbassamento dei consumi di carburante, con il conseguente van-taggio di una diminuzione del peso al decollo o di un aumento della tratta massima percorribile dall’aeromobile.
Vi `e poi una terza ragione per cui la diminuzione di resistenza indot-ta rappresenta un obiettivo fondamentale. L’ala principale del P180 `e posta a valle di quella anteriore, e in certe condizioni di volo in alta incidenza questa si trova investita direttamente dalla scia vorti-cosa generata dal canard ; ci`o produce un effetto di disturbo del flusso aerodinamico intorno ad essa, che provoca aumento della turbolenza,
ispessimento dello strato limite sull’ala (con conseguente aumento di resistenza d’attrito) e possibilit`a di separazioni del flusso. Anche le eliche si trovano immerse nella scia prodotta dal canard : ci`o provo-ca una diminuzione dell’efficienza del propulsore, oltre a rappresentare un ciclo di carico affaticante per le pale delle eliche stesse. Gli effetti sopra citati sono correlati direttamente alla vorticit`a generata dal ca-nard, e vengono attenuati nel caso che si verifichi una diminuzione della resistenza indotta.
2. Aumento del CL: La forza di portanza generata dal canard rapp-resenta una quota decisamente minoritaria della portanza totale, ma assume un ruolo fondamentale per l’equilibrio in beccheggio nelle varie fasi del volo. Se quindi appare logico che vada evitata la diminuzione del CL del canard, bisogna considerare anche che un eccessivo aumento
dello stesso coefficiente non sarebbe un fatto positivo, perch´e compro-metterebbe quell’equilibrio di forze e momenti che la configurazione originale garantisce gi`a in tutte le condizioni.
Tuttavia, un aumento contenuto del CL del canard presenta alcuni
vantaggi:
• L‘aumento della portanza generata dal canard consentirebbe di ridurre il carico aerodinamico richiesto alla coda, con la conseguen-za di una diminuzione della resistenconseguen-za di trim.
• Attualmente il P180 vola in condizioni di crociera di alta velocit`a con un angolo di incidenza leggermente positivo, per compensare la scarsa pressione dinamica dovuta alla bassa densit`a dell’aria in alta quota. Un aumento del CL del canard potrebbe risolvere
questo problema, permettendo il volo a incidenza zero; in questo modo tutte le superfici portanti lavorerebbero in condizioni otti-mali, e si ridurrebbe anche la resistenza di pressione agente sulla fusoliera.
• L’aumento del CL in condizioni di alta incidenza e bassa
veloc-it`a pu`o contribuire a diminuire la velocveloc-it`a di approach dell’aero-mobile, permettendo di certificarlo per l’atterraggio su piste pi`u brevi.
`
E stato valutato che un aumento del 5% del valore attuale del CL
rap-presenterebbe un risultato ottimale; ad esempio, a parit`a di portanza prodotta, esso consentirebbe una diminuzione di 3 kt rispetto al valore attuale della velocit`a di avvicinamento.
Non `e ovviamente praticabile la simulazione, nel corso dell’ottimizzazione, di un numero di condizioni sufficiente per descrivere in maniera completa tutte le situazioni che vengono incontrate dall’ala del velivolo nel corso dello svolgimento della missione. Inoltre il codice CFD utilizzato, che risolve le equazioni di Eulero per fluidi ideali comprimibili, `e particolarmente adatto per la simulazione di flussi con Mach transonici e basso angolo di incidenza. Risulta perci`o chiara la necessit`a di “restringere il campo” delle indagini, e di limitarsi ad ottimizzare il canard per la condizione di crociera.
In pratica, alla configurazione ottimizzata si chiede di essere migliore rispetto all’originale per quanto riguarda le condizioni di crociera (alta ve-locit`a, bassa incidenza) ma anche di non essere peggiore di questa in tutte le altre condizioni (bassa velocit`a, alta incidenza); si rimanda pertanto ad una fase successiva l’effettivo controllo della rispondenza della configurazione ot-timizzata a tutti i requisiti necessari per il volo. Ci`o non toglie che si debba porre, in sede di valutazione dei risultati, una particolare considerazione alla compatibilit`a della soluzione ottenuta con il funzionamento in condizioni di volo “non-in-crociera”.
3.2
Vincoli
Una volta stabiliti gli obiettivi `e necessario definire i vincoli da imporre al processo di ottimizzazione; questo `e tanto pi`u necessario nel caso presente in quanto si tratta non di una progettazione ex novo dell’ala — come nel caso affrontato in Pinelli et al. [1]— ma del tentativo di miglioramento di una configurazione gi`a operante con successo.
Affrontando la modifica di un sistema complesso come quello di un aero-mobile, in cui vanno considerati una grande quantit`a di fattori spesso correlati tra loro, l’operazione di ricerca e imposizione dei giusti vincoli `e di primaria importanza anche per garantire che la configurazione ottimizzata per fornire certe prestazioni in crociera non debba poi essere scartata per motivi diversi dall’aerodinamica.
Allo scopo di una pi`u ordinata esposizione, si definiscono nel seguito due criteri di classificazione dei vincoli. Il primo criterio consiste nel suddividere i vincoli in geometrici e aerodinamici1. La seconda distinzione `e tra i vincoli
imposti a priori e quelli da imporre a posteriori, cio`e rispettivamente i vincoli
1
Va chiarito che tale suddivisione assume un carattere puramente speculativo, e non
ha alcuna pretesa di generalit`a. Dal punto di vista logico-matematico, non vi `e alcuna
differenza tra i due tipi di vincolo; appare per`o utile separare concettualmente contributi
espressi in termini di “ci`o che non viene consentito al codice di fare” e quelli espressi come “ci`o che il codice deve riconoscere come un fatto negativo”.
In pratica, l’imposizione di vincoli a priori piuttosto che a posteriori viene realizzata in maniera differente. I primi, infatti, sono ottenuti medi-ante un’adeguata scelta dei gradi di libert`a consentiti all’ottimizzatore, in modo tale da non permettere che vengano create configurazioni non ammis-sibili. I secondi, invece, vengono imposti attraverso la scrittura di apposite funzioni di penalit`a, che vengono inserite nella funzione costo (come descritto in sezione 1) allo scopo di far scartare dall’ottimizzatore le configurazioni che non rispettano il dato vincolo.
3.2.1
Vincoli geometrici
Il primo vincolo geometrico da imporre `e un vincolo a priori : la garanzia che la modifica della geometria riguardi esclusivamente il particolare interessato al processo di ottimizzazione, e non il resto del corpo. Nel caso specifico, si tratta di assicurare che la deformazione riguardi il canard soltanto, e non la fusoliera o altri elementi.
I vincoli successivi derivano dall’esigenza di ottenere modifiche che non richiedano di dovere riprogettare i componenti strutturali che formano ma-terialmente il canard : si parla dunque di “vincoli strutturali”. Questo `e un esempio della multidisciplinariet`a che deve assumere l’ottimizzazione aerod-inamica, soprattutto in campo aeronautico.
• La forma in pianta del canard non deve cambiare.
• Non `e permesso lo spostamento dei bordi di attacco e d’uscita del canard.
• La porzione di volume interno al canard che costituisce il cassone alare non deve diminuire; ci`o allo scopo di:
– garantire l’alloggiamento di tutti i sistemi di bordo necessari (at-tuatori degli ipersostentatori, impianto antighiaccio, luci. . . ); – evitare che la configurazione ottimizzata sia caratterizzata da un
aumento di peso strutturale. Infatti, una volta fissata la forma in pianta dell’ala, c’`e un legame direttamente proporzionale tra il volume interno e lo spessore medio del wing box ; garantire la conservazione del volume equivale perci`o ad evitare un assottiglia-mento del cassone, che comporterebbe un appesantiassottiglia-mento della struttura.
3.2.2
Vincoli Aerodinamici
I vincoli aerodinamici sono quelli che vengono imposti per evitare che la soluzione converga verso valori di CLe CD che, pur minimizzando la funzione
costo, sono ritenuti dannosi o indesiderabili dal punto di vista delle qualit`a aerodinamiche del velivolo. Per evitare che si tenda a questi valori, bisogna prevedere apposite penalizzazioni; per loro stessa natura, quindi, i vincoli aerodinamici sono sempre a posteriori. Nel caso presente, si impone quanto segue:
• Il CL del canard non deve diminuire n´e aumentare eccessivamente
rispetto al valore originale.
• Un eventuale aumento di portanza non deve privilegiare i profili di estremit`a rispetto a quelli di radice, per evitare lo stallo di estremit`a quando il canard `e portato ad alta incidenza.
Si possono poi imporre vincoli aerodinamici allo scopo di sopperire a par-ticolari insufficienze del modello CFD usato; ad esempio, nel caso presente, il fatto che non siano tenuti in conto gli effetti della viscosit`a, in particolare la resistenza d’attrito e l’evoluzione dello strato limite. Ci possono anche essere vincoli che riguardano il mantenimento delle prestazioni “non-in-crociera”, che (pur non essendo l’oggetto dell’ottimizzazione) vanno garantite, pena l’inutilizzabilit`a pratica dei risultati. In questo caso, si sono individuati i seguenti punti:
• La resistenza d’attrito non deve aumentare rispetto al valore originale; si possono individuare due principali cause di un eventuale aumento della resistenza d’attrito:
1. un aumento della superficie bagnata;
2. una forma dei profili alari tale da indurre l’ispessimento dello stra-to limite, o addirittura la sua separazione in determinate con-dizioni.
• Non si deve avere stallo dei profili per valori di incidenza e velocit`a a cui l’ala originale garantisce un corretto funzionamento.
Per potere imporre questi vincoli, `e necessario utilizzare un codice CFD appropriato, aggiuntivo rispetto a quello che si `e usato per la valutazione delle forze aerodinamiche in crociera; le difficolt`a pratiche di implementare questo doppio calcolo fluidodinamico, e la insostenibilit`a del costo computazionale richiesto per realizzarlo, hanno rappresentato un limite all’introduzione di questi elementi. Si ritene comunque che la loro definizione sia parte integrante del lavoro di tesi.
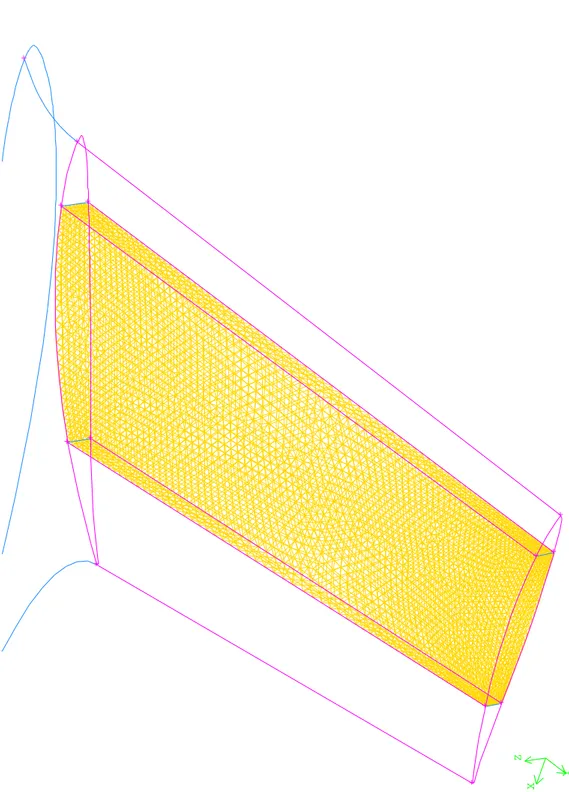
Figura 3.1: Vista completa del modello usato per l’ottimizzazione
3.3
Il modello
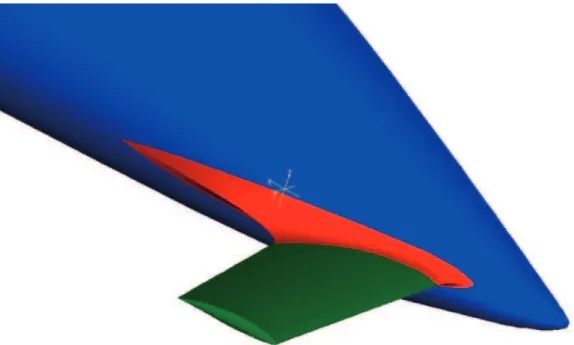
Il modello utilizzato per l’ottimizzazione (figura 3.1) `e composto da una fu-soliera, da un’ala posta in posizione anteriore e da un elemento di raccordo, le cui geometrie e dimensioni sono derivate dalla configurazione attuale del P180; questi tre elementi, evidenziati con colori diversi, sono mostrati in scala ingrandita in figura 3.2. L’estrema semplicit`a del modello `e dovuta alla necessit`a di mantenere basso il numero di elementi della mesh; questo, chiaramente, comporta dei limiti evidenti.
In primo luogo, non possono essere calcolati gli effetti dell’interferenza aerodinamica tra il canard e gli altri elementi dell’aeromobile, salvo che con la parte anteriore della fusoliera. Per quanto riguarda l’interferenza eserci-tata dal resto del corpo (soprattutto del sistema portante costituito da ala principale e coda) sull’ ala anteriore (ad esempio l’upwash indotto dall’ala retrostante), si suppone che l’effetto globale prodotto sia pressoch´e costante al variare della geometria del canard, e che quindi sia ininfluente per il con-fronto tra le diverse configurazioni. Per quanto riguarda invece l’interferenza dell’ala anteriore sul resto del corpo, si `e cercato di considerarne l’effetto in maniera indiretta, come spiegato in sezione 3.1.
Figura 3.2: Particolare del modello: sono visibili la parte anteriore della fusoliera, il canard e il raccordo
Vi `e poi un’altra fonte di errore che influisce in maniera diretta sul funzion-amento dell’ottimizzatore e ne influenza i risultati. Finora si `e sempre fatto riferimento ai coefficienti aerodinamici CLe CD “del canard ”; il codice CFD,
invece, fornisce il valore dei coefficienti riferiti all’intero corpo2. Il problema
nasce dal fatto che le dimensioni dell’ala sono molto minori di quelle della fusoliera; il CD del canard va quindi a sommarsi al CD (relativamente
eleva-to) della fusoliera, rendendo il valore complessivo poco preciso (si rimanda alla sezione 3.6).
3.4
La mesh
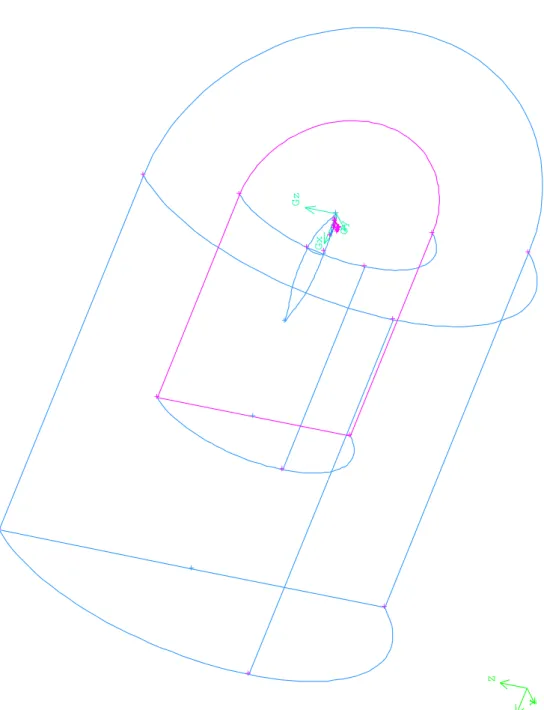
La mesh, costruita attorno e all’interno del modello, `e composta da 113905 nodi, 542451 elementi tetraedrici, di cui 44856 solidi, che riempiono il vol-ume interno al cassone alare del canard, e 497595 fluidi che compongono il dominio di calcolo CFD (il numero massimo ammissibile di elementi fluidi era stato precedentemente stimato in 500000). Il dominio `e semicilindrico con calotta a settore sferico centrata nell’origine degli assi coordinati, a sua volta coincidente con il “naso” della fusoliera; l’estensione del dominio `e stata
2
Per definizione, la superficie che adimensionalizza i coeficienti aerodinamici `e fissata ed equivale alla superficie alare di riferimento del P180.
Gx Gy Gz + + + + + + + + + + + + + + + + ++++++ ++ + ++ ++ ++ + X Y Z
Gx Gy Gz + + + + + + + + + + + + + + + + + + X Y Z
Gx Gy Gz + + + + + + + + + + + + + + + X Y Z
+ + + + + + + + + + + + + X Y Z
arbitrariamente fissata a 18 · m.a.c a monte e 35 · m.a.c. a valle dell’origine3
(figura 3.3).
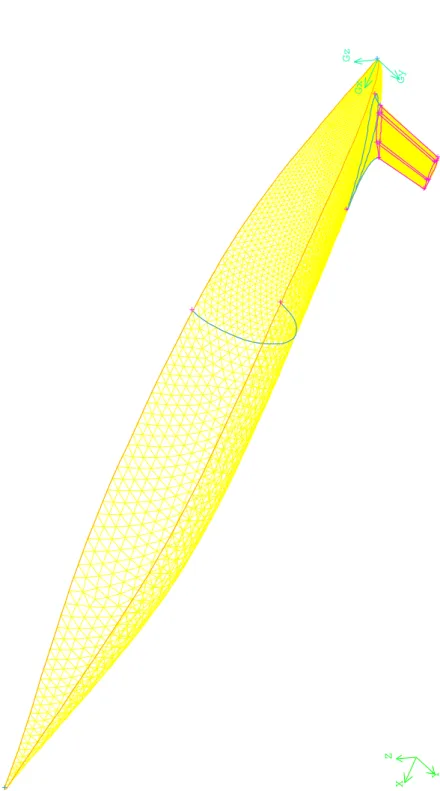
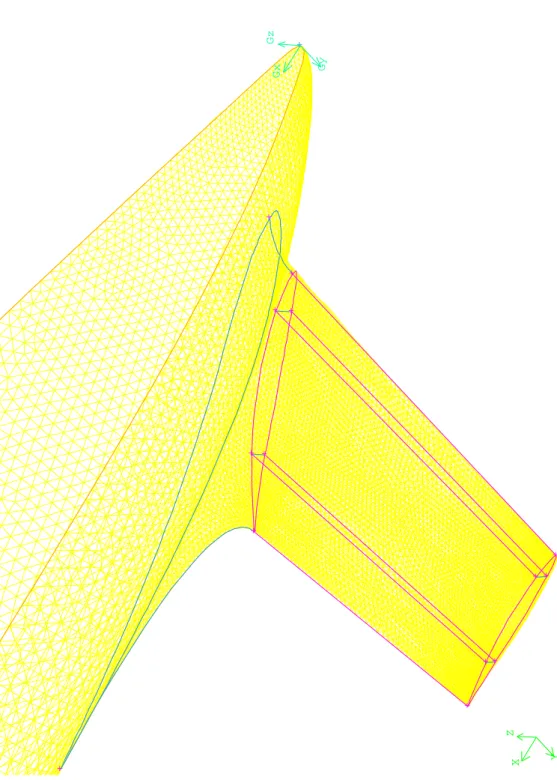
Le 28088 facce triangolari disegnate sulla superfice del corpo si infittiscono notevolmente nella zona del muso e intorno all’ala anteriore, e si diradano sulla parte centrale e posteriore della fusoliera (vedi figure 3.4 e 3.5); in parti-colare, le facce sono 8750 sulla fusoliera, 2727 sul raccordo e 16611 sull’ala. Il motivo di questa disparit`a `e comprensibile: la necessit`a di un calcolo preciso del flusso riguarda la zona intorno al canard, non a tutto il corpo. La mesh composta da elementi solidi, che occupa il volume interno del wing box (figu-ra 3.6), ha lo scopo di permettere il calcolo della variazione di tale volume, e perci`o l’imposizione del vincolo strutturale di cui alla sezione 3.1.
La massima attenzione `e stata posta nella realizzazione di una mesh i cui elementi avessero la minore skewness possibile. L’importanza decisiva di questo dato sar`a chiarita nella sezione 3.6.
3.5
Funzione costo
La funzione costo utilizzata ha una struttura fissa, definita come segue:
J = f (CL, CD) + penal(CL) + penal(Vol ) + penal(CLiY) + . . . (3.1)
• f (CL, CD) `e l’elemento che traduce in termini matematici gli obiettivi
illustrati in sezione 3.1, ovvero la minimizzazione del CD e l’aumento
di CL entro una certa soglia. Questo non equivale necessariamente
a massimizzare l’efficienza come in Pinelli et al. [1]); pi`u in generale, saranno prese in considerazione funzioni del tipo:
f (CL, CD) = (CD/CD0)n/(CL/CL0)m
con n, m ∈ N, e funzioni del tipo:
f (CL, CD) = 2 − [(CL/CL0)n/(CD/CD0)m]
Con CL0 e CD0 si intendono rispettivamente il coefficente di portanza e
di resistenza della configurazione originale o di partenza; per chiarezza, la funzione costo `e sempre scritta in maniera tale da valere 1 per CL=
CL0 e CD = CD0.
3
Per m.a.c. si intende la corda media aerodinamica dell’ala principale del P180, il cui valore `e pari a circa 1.2 m
• penal(CL) `e la funzione di penalizzazione rispetto al CL, e ha lo scopo
di evitare che l’escursione del CL avvenga oltre i limiti stabiliti; essa `e
scritta come segue:
penal(CL) = (cost.) · max(0, f (CL))
La penal(CL) assume valore nullo quando il vincolo che essa esprime `e
rispettato, mentre assume un valore positivo quando ci`o non accade; il vincolo `e definito dalla f (CL), e la sua entit`a aumenta col valore della
costante a moltiplicare. Ad esempio, la funzione:
penal(CL) = 10n·max(0, −(CL−CL0))
`e l’espressione di un vincolo “unilaterale”, che penalizza esclusivamente le configurazioni con CL minore di quello originale; agendo sul valore
di n, questo vincolo diventa pi`u o meno rigido. Nel caso specifico, la penal(CL) deve esprimere una serie pi`u ampia di esigenze:
– garantire che in nessun caso il valore di CL diminuisca;
– esprimere un limite superiore all’aumento di CL;
– contrastare adeguatamente la diminuzione di f (CL, CD) causata
dalla crescita del CL.
Quest’ultimo aspetto merita un commento a parte. Per via della forma assunta dalla f (CL, CD), si ha che un aumento di CL produce sempre
una diminuzione della funzione costo. Pu`o quindi accadere, ad esem-pio nel caso che sia CL CD, che l’obiettivo di massimizzare il CL
diventi numericamente preponderante rispetto a quello — considerato pi`u importante — di minimizzare il CD. Emerge perci`o la necessit`a
di penalizzare l’aumento di CL in modo da controbilanciare l’effetto
di cui sopra, rendendo pi`u conveniente per l’ottimizzatore la ricerca di configurazioni a basso CD piuttosto che ad alto CL. Questo
indipen-dentemente dal fatto che nel caso specifico si abbia anche un limite massimo all’aumento del CL.
• penal(Vol ) : questo termine ha lo scopo di penalizzare le configurazioni che presentano una diminuzione del volume interno del wing box. Il codice calcola, per ogni configurazione, tale volume come sommatoria dei volumi di tutti gli elementi solidi (figura 3.6); quindi, alla funzione costo si aggiunge quanto segue:
• penal(CLiY) : questo termine ha lo scopo di penalizzare le
configu-razioni caratterizzate da un maggiore aumento di carico aerodinamico sui profili di estremit`a piuttosto che su quelli di radice. Il parametro CLiY si ottiene eseguendo N sezioni del corpo con piani y = yi,
dis-tanziati tra loro di δyi, calcolando il coefficiente di portanza
bidimen-sionale4 C
` i su ciascuna sezione e quindi integrando i dati:
CLiY = N X i=1 C` i·yi·δyi CL·(b/2)2
Un aumento di CLiY, ovviamente a parit`a di N e degli yi, indica che
i profili di estremit`a sperimentano un ∆C` superiore a quello che si
determina alla radice. Il vincolo si esprime poi in questo modo: penal(CLiY) = max(0, (CLiY −CLiY0))
3.6
Aspetti numerici del problema
Finora si sono considerate le quantit`a numeriche in gioco sempre come valori esatti, senza preoccuparsi degli effetti che gli errori numerici inevitabilmente presenti possono provocare; scopo di questa sezione `e analizzare i vari con-tributi che costituiscono l’errore, e suggerire alcune strategie di intervento per limitarne i problemi connessi.
3.6.1
Analisi dell’errore
I soggetti di questa analisi sono i coefficienti aerodinamici CL e CD ottenuti
tramite il calcolo CFD; `e evidente che il loro valore non pu`o essere considerato esatto, ma `e affetto da errore. Questo errore pu`o essere suddiviso in due componenti, l’errore bias o ricorsivo, e l’errore random o casuale, cos`ı definite: • l’errore bias `e quello che viene commesso in egual misura ad ogni calcolo
di CL e CD;
• l’errore random `e quel tipo di errore la cui entit`a varia in maniera casuale ad ogni calcolo.
Rientrano nella prima categoria tutti gli errori causati dall’inadeguatezza del modello a rappresentare la realt`a; nel caso presente, si pu`o citare ad es-empio il fatto che le equazioni di Eulero non descrivano in maniera completa
4
In questo caso la lunghezza adimensionalizzante `e la corda effettiva calcolata profilo per profilo.
il problema fluidodinamico, come il fatto che il corpo utilizzato per la simu-lazione non sia completo di tutte le sue parti. Tuttavia, lo scopo di questo calcolo non `e quello di valutare in assoluto le forze aerodinamiche sul corpo, quanto di confrontare tra loro corpi di geometria diversa nelle medesime con-dizioni di flusso. Dato quindi che l’errore bias `e per definizione costante per ciascuna configurazione esaminata, esso non verr`a preso in considerazione nel seguito.
Rientrano nella categoria random gli errori computazionali commessi al-l’interno del calcolo CFD, legati tra l’altro al valore della skewness degli elementi della mesh. Questo secondo punto merita una considerazione par-ticolare. Tutte le configurazioni create all’interno dell’ottimizzatore vengono realizzate deformando la mesh di partenza; questo comporta che, con l’a-vanzare dell’ottimizzazione, le configurazioni in esame siano caratterizzate da una mesh contenente elementi sempre pi`u distorti. L’aumento progressi-vo della skewness far`a crescere mano a mano gli errori computazionali; per questo motivo `e estremamente importante costruire una mesh iniziale con skewness pi`u bassa possibile.
`
E stato svolto uno studio per determinare l’entit`a degli errori random commessi. Assumiamo di poter scrivere i coefficienti CL e CD nel modo
seguente:
CL = CL±δCL
CD = CD±δCD
dove CL e CD sono i valori medi statistici per i rispettivi coefficienti, e
δCL e δCD sono gli errori random che caratterizzano tali coefficenti. Si sono
confrontati tra loro i risultati di due calcoli CFD svolti su due meshes differ-enti, costruite intorno al corpo originale praticamente con lo stesso numero e dimensione degli elementi, e valori di skewness molto simili. Le differenze tra i risultati di queste due analisi, nominalmente identiche, sono un buon indice per valutare l’incidenza dell’errore casuale. Facendo la media d’insieme tra i vari risultati ottenuti nelle diverse condizioni a cui sono state svolte le prove, si ha:
δCL/CL'0.57%
δCD/CD '2.08%
Come si vede, l’errore relativo sul CD vale quasi quattro volte quello
commesso sul CL; una possibile spiegazione di questo fatto `e data nel
segui-to. Come noto, i coefficienti CL e CD sono riferiti alle forze che agiscono
CL= CL(canard)+ CL (f usoliera)+ CL (raccordo)= CL (canard)+ ∆CL
CL= CD (canard)+ CD (f usoliera)+ CD (raccordo)= CD (canard)+ ∆CD
Considerato che la forma della fusoliera non `e tale da produrre portanza, ma sicuramente produce resistenza di pressione (ed eventualmente d’onda), e vista l’evidente sproporzione dimensionale di quest’ultima rispetto all’ala anteriore, si pu`o affermare che:
CL(canard) ∆CL
CD (canard) ∆CD
Ora, si pu`o ragionevolmente ipotizzare che l’errore computazionale su ∆CL e ∆CD sia superiore allo stesso errore su CL(canard) e CD (canard), e ci`o
a causa del numero enormemente minore di elementi adiacenti alla fusoliera rispetto a quelli adiacenti al canard (figura 3.4). La differenza `e che l’errore computazionale relativamente elevato di ∆CL rappresenta una quota
minori-taria in termini assoluti del δCL, mentre accade il contrario per il δCD, che va
soggetto a una quota di errore computazionale nettamente superiore e quin-di, a parit`a delle altre componenti, a un errore random complessivamente pi`u elevato.
3.6.2
Scelta della funzione costo
L’algoritmo di ottimizzazione utilizzato nel caso presente si fonda sulla com-parazione dei risultati, cio`e dei valori della funzione obiettivo J, delle diverse configurazioni; si pone il problema della correttezza o meno di tale operazione di comparazione5. Perch`e la comparazione tra diversi individui sia corretta,
si deve potere escludere l’eventualit`a che il confronto sia falsato, ovvero che una configurazione venga selezionata al posto di un’altra per errore. Espri-mendo il problema in simboli, date due configurazioni A e B, in analogia con quanto scritto per CL e CD, si ha:
JA= JA±δJA
JB = JB±δJB
5
In molti algoritmi di ottimizzazione diversi da quello del simplesso, non soltanto la selezione delle configurazioni vincenti avviene in base alla comparazione tra diversi valori di J, ma anche la ricerca dei nuovi individui avviene attraverso un calcolo che coinvolge in qualche modo la J, sia che si tratti di algoritmi derivativi che non derivativi. Quest’ultimo elemento contribuisce alla “proliferazione” dell’errore di partenza nel corso
dell’ottimiz-zazione. Ci`o non avviene nel caso dell’algoritmo di Nelder e Mead [3], il che rappresenta
Supponiamo che sia JA < JB: si avrebbe un errore di comparazione se
fosse JA> JB, cosa che pu`o accadere solo se:
δJA+ δJB > JB−JA
cio`e se gli errori commessi nel valutare J fossero maggiori della differenza tra i due valori di J. Ne consegue che, dati due individui A e B, si pu`o diminuire la probabilit`a che ci siano errori di comparazione tra loro se:
1. diminuiscono gli errori δJA e δJB;
2. aumenta la differenza tra JA e JB.
Nel seguito sono analizzati singolarmente i due punti.
1. Diminuzione dell’errore
La funzione costo, tralasciando le funzioni di penalit`a, assume la forma seguente:
J = f (CL, CD) = L[g(CL, CD)] (vedi nota6)
L’errore δJ si pu`o scrivere direttamente in funzione di g(CL, CD):
J = L[g(CL, CD)] , J = L[g(CL, CD)]
↓
δJ = L[g(CL, CD) − g(CL, CD)]
Come si vede, δJ non dipende solamente dall’errore cui sono affetti i parametri CL e CD (cio`e dalla differenza tra CL e CL e tra tra CD e CD),
ma anche dalla funzione g; dato poi che δCL/CL δCD/CD, `e chiaro che
l’errore pu`o risultare sensibilmente diverso a seconda della g(CL, CD) scelta.
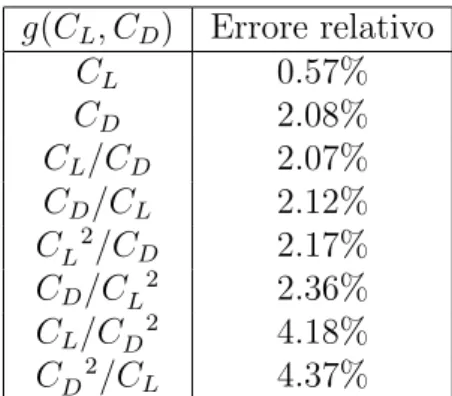
In tabella 3.1 sono riportati gli errori random medi, valutati come spiegato a pagina 40, calcolati per diverse g(CL, CD).
6
L = A · g(CL, CD) + B `e un semplice funzionale lineare; i due tipi di funzione obiettivo
proposti precedentemente sono espressione di g(CL, CD) inverse:
f (CL, CD) = (CD/CD0)n/(CL/CL0)m → g(CL, CD) = CDn/C m L f (CL, CD) = 2 − [(CL/CL0)n/(CD/CD0)m] → g(CL, CD) = CLn/C m D
g(CL, CD) Errore relativo CL 0.57% CD 2.08% CL/CD 2.07% CD/CL 2.12% C 2 L /CD 2.17% CD/CL2 2.36% CL/CD2 4.18% C 2 D /CL 4.37%
Tabella 3.1: Errore random — Confronto tra diverse funzioni costo
2. Escursione di J
Il modo migliore di spiegare questo concetto `e attraverso un esempio: si consideri una ipotetica configurazione A caratterizzata da un aumento del CL pari al 5% e una diminuzione del CD del 10%, e si indichi con B la
configurazione originale. In tabella 3.2 sono confrontati i valori assunti per A e B dalle diverse funzioni:
Funzione costo JA JB (CD/CD0)/(CL/CL0) 0.857 1. 2 − (CL/CL0)/(CD/CD0) 0.833 1. (CD/CD0)/(CL/CL0)2 0.816 1. 2 − (CL/CL0)2/(CD/CD0) 0.775 1. (CD/CD0)2/(CL/CL0) 0.771 1. 2 − (CL/CL0)/(CD/CD0)2 0.704 1.
Tabella 3.2: Escursione di J — Confronto tra diverse funzioni costo
Appare evidente che l’escursione di J, ovvero la differenza (JB −JA),
`e molto diversa da una scrittura all’altra della funzione obiettivo; si tenga presente che anche gli errori relativi variano fortemente da caso a caso, quindi la scelta della funzione costo pi`u adatta non `e immediata, e spesso procedere per tentativi resta l’unica soluzione.