5
5
ANALISI DEL CARICO UTILE
5.1 Introduzione
Il sottosistema comprendente il carico utile è di gran lunga il sistema più im-portante dell’intero satellite in quanto il corretto funzionamento comporta il buon esi-to dell’intero programma spaziale. Molte innovazioni sono state rese possibili dalle moderne tecnologie spaziali in confronto a quelli che erano i primi esemplari di satel-liti scientifici o commerciali mandati in orbita dall’uomo. Le maggiori prestazioni garantite da questi sistemi si pagano però in termini di maggiore complessità, peso e costo dell’intero sottosistema; per realizzare un ottimo prodotto finale, capace di soddisfare tutti i requisiti ed i vincoli imposti, nel seguente lavoro si è cercato di ot-timizzare il rapporto prestazioni costo.
5.2 Tipi di carico pagante
Una prima distinzione tra i vari tipi di carico pagante è possibile se andiamo a considerare il suo utilizzo primario come descritto dal seguente schema
figura 5.2.1 Distinzione tra i vari tipi di carico pagante
Il sistema può variare a seconda degli scopi di missione, ma anche in base al tipo di utente finale dei dati acquisiti: civile o militare; in quest’ultimo caso, i requisi-ti imposrequisi-ti possono far orientare il progetrequisi-tista verso soluzioni di filosofia completa-mente diversa rispetto agli altri tipi di usufruitori, l’obiettivo primario diventa il rag-giungimento delle migliori prestazioni, piuttosto che la realizzazione di un sistema con un buon rapporto prestazioni costo.
Per quanto riguarda i sistemi destinati a scopi scientifici, invece, non ha senso parlare di prestazioni o di costi perché il più delle volte questi oggetti vengono rea-lizzati appositamente per la missione per cui non esistono termini di paragone che ci consentano di valutare la qualità del sistema.
5.2.1 Sistemi per le telecomunicazioni
I sistemi per le telecomunicazioni sono costituiti in genere da uno o più satel-liti e da due o più stazioni riceventi; queste stazioni, a loro volta, possono essere di-versificate se hanno antenne riceventi fisse, nel caso che il satellite rimane approssi-mativamente fissato sulla sfera celeste (es:satelliti geostazionari), oppure se sono do-tate di antenne orientabili, qualora ci sia bisogno di seguire la trasmissione lungo l’orbita del satellite. I requisiti che devono soddisfare questi sistemi, in genere, sono: garantire la comunicazione anche nelle peggiori condizioni, essere in grado di copri-re la maggior parte del globo.
Alcuni esempi sono il TDRS (track and data relay satellite, satellite per tra-smissione traccia e dati) usato dalla NASA per comunicare con lo Shuttle e con
sva-Navigazione
Applicazioni
Osservazione Terra Altro Monitoraggio am-bienteComunicazione
Scientifiche
Astrofisicariati satelliti in orbita, o la costellazione IRIDIUM in grado di comunicare con qual-siasi punto della Terra. Come detto in precedenza, nel caso di applicazioni militari i requisiti possono essere più pesanti come la necessità di adottare delle tecniche volte a proteggere le comunicazioni da intercettazioni esterne.
5.2.2 Sensori per scopi scientifici
I sistemi per queste applicazioni sono i più svariati e possono andare da sem-plici sistemi atti a misurare l’ambiente spaziale, o per compiere esperimenti in orbita, fino alle più impegnative missioni interplanetarie per la scoperta dei segreti del co-smo.
5.2.3 Sensori per applicazioni varie
Rientrano in questo campo tutti i sistemi per l’osservazione della Terra, la navigazione, etc. La maggior parte di questi sistemi viene posto in orbite LEO prefe-ribilmente eliosincrone (in grado, quindi, di visitare la stessa zona sempre allo stesso orario ed alle medesime condizioni di illuminazione). Si può, anche qui, distinguere nettamente tra sistemi civili e militari; basti pensare al sistema GPS in grado di forni-re la posizione di qualsiasi mezzo sulla terra con una pforni-recisione di circa 10 m per u-tenti civili, ma che arriva fino ad 1 metro se usato per applicazioni militari.
5.3 Sistemi per Osservazione della Terra
Questi sistemi possono essere distinti in base ad una classificazione, riportata in figura 5.3.1, basata sul principio fisico che consente la rilevazione. Per ulteriori in-formazioni si veda [10].
figura 5.3.1 Distinzione tra i vari sensori per Osservazione della Terra
Strumenti geofisici Tipo di sistema
Laser Spettrometri
Attivi Passivi
Radar Visibile Infrarosso Microonde
5.3.1 Laser
I Laser, altrimenti detti LIDAR (Light Detection And Ranging instruments, Strumenti per Rilevamento e Tracciamento della Luce), sono sistemi usati solo di re-cente che sfruttano la radiazione riflessa dall’atmosfera colpita da un fascio laser proveniente dallo strumento; più in particolare si distinguono in strumenti:
• che danno informazioni sulla quantità e qualità degli strati atmosferici utilizzandone le proprietà di riflessione;
• che, al contrario del precedente, utilizzano le proprietà di assorbimen-to dei costituenti atmosferici;
• che sfruttando l’effetto doppler, restituendo informazioni sulla veloci-tà delle particelle e quindi dei venti;
• che misurano accuratamente l’altezza relativa di ogni punto della su-perficie terrestre.
Gli utilizzi più comuni sono volti ad ottenere informazioni sulla qualità dell’atmosfera ed ad informazioni precise sulla topografia del territorio; il principale vantaggio di questi sistemi è il fatto che permettono analisi non ottenibili con altri strumenti e che non sono particolarmente pesanti ed ingombranti, ma sono soggetti al grande svantaggio in campo spaziale di presentare grosse richieste di potenza per l’emissione del fascio laser, nell’ordine dei 100 W. Alcuni esempi a cui si può far ri-ferimento sono gli strumenti CALIPSO ed ALADIN.
5.3.2 Geofisici
Strumenti come accelerometri e magnetometri consentono la misurazione dei gradienti del campo gravitazionale o della gravità, che permette, ad esempio, la rile-vazione degli spostamenti di massa sul globo terrestre causati dallo scioglimento dei ghiacciai, dal ciclo idrogeologico e da eventuali movimenti tettonici.
figura 5.3.2 Misurazione del campo gravitazionale effettuata dallo strumento LAGEOS
5.3.3 Spettrometri
Questi sono i strumenti più comuni, sfruttano l’energia elettromagnetica ri-flessa od emessa dalla superficie terrestre: si possono distinguere in due tipi passivi e attivi.
I sistemi passivi sfruttano solo la radiazione luminosa riflessa dalla terra, con-siderata come un corpo nero, mentre i sistemi attivi provvedono loro stessi all’illuminazione, per cui sono da considerarsi come radar studiati per un utilizzo spaziale.
5.3.4 Spettrometri attivi
Questi sistemi richiedono grosse risorse in termini di potenza richiesta, in-gombro e massa, ma permettono misurazioni in qualsiasi condizione. Infatti agiscono indipendentemente dalla presenza della luce solare e, lavorando sulle alte frequenze (nel campo dei GHz), riescono a vedere molto chiaramente anche in presenza di grosse nubi o pioggia; inoltre, sfruttando la polarizzazione dell’onda ricevuta, sono in grado di ricostruire immagini tridimensionali della zona osservata, perciò sono molto utilizzati dai satelliti spia militari. La caratteristica di questi sistemi è che lavorano su lunghezze d’onda relativamente alte (nell’ordine del cm) per cui restituiscono imma-gini di zone molto ampie (circa 1000 km) con risoluzioni molto basse. Possono di-stinguersi in altimetri, SAR e Scatterometri.
Altimetri:
Questo tipo di sensori misurano l’altezza del profilo terrestre; sono utili per le grosse masse oceaniche e molto meno per i sistemi continentali a causa della bassa risoluzione che li caratterizza. Normalmente vengono utilizzati in combinazione con altri strumenti per determinare i movimenti marini.
Una sottocategoria di questi strumenti è rappresentata dai sistemi radar per l’analisi del profilo delle nubi e della pioggia; questi ultimi sistemi operano ad altis-sima frequenza (intorno ai 90 GHz) riuscendo così a superare facilmente il ghiaccio presente nelle nubi e restituire informazioni importanti sulla composizione di queste ultime, nonché informazioni sulla quantità di pioggia caduta.
figura 5.3.3 Immagine ottenuta dal TRMM sulla densità di pioggia di un tipico ciclone tropicale
Questi sistemi sono utilizzati soprattutto per scopi meteorologici in quanto permettono di conoscere in maniera più approfondita i complessi meccanismi che re-golano i movimenti delle masse nuvolose.
SAR
Queste apparecchiature, il cui nome è un acronimo che sta per Syntethic Aper-ture Radar, Radar ad Apertura Sintetica, permettono misurazioni su ampie zone sfruttando a volte anche la capacità di inviare fasci d’onda multipli su zone diverse. La seguente immagine e stata inviata dal RADARSAT e illustra la situazione intorno alle isole Galapagos allorché vennero inondate dal petrolio fuoriuscito della petrolie-ra Jessica dupetrolie-rante il famoso naufpetrolie-ragio del gennaio 2002.
figura 5.3.4 Immagine inviata dal RadarSat
Strumenti a multipla direzione e polarizzazione
Questi sistemi, che fanno parte della categoria dei SAR, sono in grado di fare misurazioni a diversi angoli di incidenza e con differenti polarizzazione ottenendo così informazioni più dettagliate sull’intera biosfera.
figura 5.3.5 Zona fotografata con un normale radar (sinistra) e dal MISR un radar multidire-zionale (destra)
Scatterometri
Questi oggetti sono volti allo studio delle velocità con cui si spostano le gran-di masse nuvolose utilizzando l’effetto Doppler come principio fisico per la rileva-zione. Vengono utilizzati sia come strumenti metereologici sia come ausilio per i si-stemi di navigazione, come è stato fatto con i satellite ERS attraverso cui sono state ottimizzate le rotte transoceaniche delle navi per evitare le zone tempestose
figura 5.3.6 Osservazione eseguita dall’ERS
5.3.5 Spettrometri passivi
Questi sistemi, come abbiamo già enunciato, sfruttano la radiazione elettro-magnetica riflessa o emanata dalla Terra stessa; possono essere separati in tre catego-rie:
• operanti nel visibile; • operanti nell’infrarosso; • operanti nelle microonde.
Sistemi operanti nel visibile
Questi sistemi usano la parte dello spettro compresa tra l’ultravioletto (≈ 0,3 µm) e l’infrarosso (≈ 0,7 µm) costituita principalmente dalla luce emanata dal sole e successivamente riflessa dalla terra; il loro vantaggio maggiore è che, operando a basse lunghezza d’onda, restituiscono immagini ad alta risoluzione, mentre il loro di-fetto principale è che possono operare solo quando la zona da osservare è illuminata dalla luce solare. I primi sistemi erano sostanzialmente delle macchine fotografiche riadattate per essere usate nell’ambiente spaziale, nelle quali il grosso inconveniente era il dover aspettare il rientro del satellite per recuperare la pellicola fotografica. I
più moderni sistemi sfruttano, invece, la tecnologia digitale che consente una più ampia vita utile del sistema e una maggiore gamma di profili di missione raggiungi-bili.
Le applicazioni di questi sistemi svariano dall’analisi della topografia del ter-ritorio, al monitoraggio disastri ambientali fino alla raccolta di informazioni per uso militare.
Ad esempio riportiamo la fotografia di una zona di Parigi ottenuta con il sa-tellite SPOT ad una risoluzione di circa 2,5 m
figura 5.3.7 Fotografia di una zona di Parigi
ottenuta con il satellite SPOT ad una risoluzione di circa 2,5 m
Sistemi operanti nell’Infrarosso
Questi sistemi operano tra le lunghezze d’onda comprese tra ≈ 0,7 µm e ≈ 10 µm sfruttando quella parte della radiazione proveniente dalla terra stessa considerata come corpo nero che emette alla temperatura di circa 300 K. Le risoluzioni ottenibili con questi sistemi sono leggermente peggiori di quelle raggiunte nel visibile ed inol-tre lavorano su un’ampia gamma di lunghezze d’onda, la metà delle quali non è uti-lizzabile a causa dell’assorbimento atmosferico; d’altra parte, permettono di effettua-re osservazioni in qualsiasi momento della giornata lavorando addirittura meglio al buio, cioè in assenza di disturbi provenienti dalla radiazione luminosa.
I sistemi più moderni vengono classificati come multispettrali in quanto sono in grado di distinguere numerose lunghezze d’onda all’interno dell’intervallo spettra-le di progetto (da circa 10 fino a 100 o più per gli iperspettrali). Con questi strumenti è possibile ottenere informazioni dettagliate sulla composizione del territorio in ter-mini di flora, fauna e risorse naturali. La seguente è una delle più dettagliate imma-gini della Terra inviate dallo spazio ottenuta dal MERIS
figura 5.3.8 Immagine della Terra inviata dal Meris
Alcuni di questi sistemi sono dedicati ad osservazioni oceanografiche e alla sua biomassa costituita per la maggior parte da fitoplancton. E’ possibile con questi strumenti analizzare anche lo stato di erosione delle coste come nella seguente im-magine ottenuta dal sensore OSMI.
figura 5.3.9 Immagine inviata dall’OSMI
Sistemi operanti nelle microonde
Sono dei radar passivi che operano nel campo delle basse frequenze (20-200 GHz). Nonostante le risoluzioni ottenibili siano molto basse questi apparati hanno la
capacità di superare agevolmente l’atmosfera e di penetrare per una certa lunghezza nel sottosuolo. Possono essere distinti in:
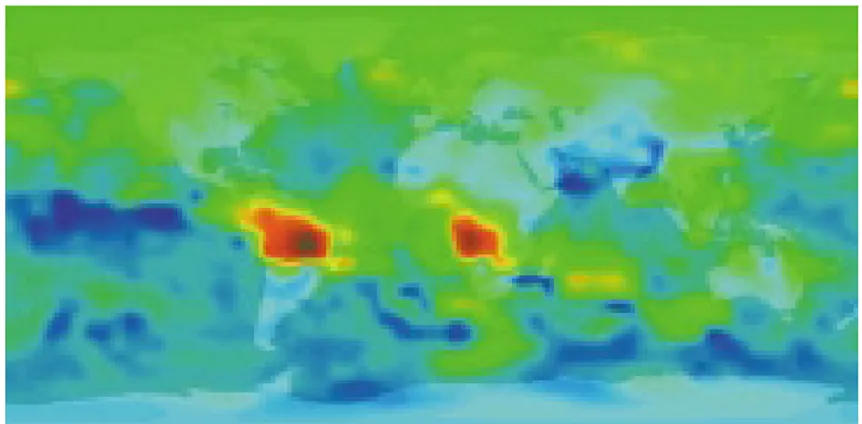
• Strumenti per l’analisi della composizione chimica atmosferica. Essi operano su tutto lo spettro d’onda ricostruendo così, a seconda delle proprietà di riflessione e assorbimento dei vari gas, la composizione chimica degli strati atmosferici. Sono molto utili negli studi sullo stato della fascia protettiva di ozono o per la rilevazione dell’inquinamento atmosferico come illustra la seguente immagine presa dal MOPITT
figura 5.3.10 Inquinamento rilevato dal MOPITT
Alcune varianti di questi strumenti sono dedicati all’analisi della tempera-tura e dell’umidità presente nell’atmosfera.
• Strumenti per l’analisi del bilancio radiativo terrestre. Anche questa ca-tegoria opera su tutto lo spettro d’onda, ma il suo scopo principale è l’analisi del bilancio tra radiazione incidente e radiazione uscente nella biosfera; questi studi sono volti alla comprensione delle modificazioni climatiche causate dall’effetto serra.
5.4 Tecnologie tipiche usate per i sensori
5.4.1 Introduzione
I principali costituenti di un sensore multispettrale (o visibile) sono la parte ottica (le lenti, gli specchi), la parte elettronica (rilevatori) ed i vari filtri che possono essere sia elettronici che ottici. Nella seguente figura viene illustrata la disposizione più generali dei vari elementi.
figura 5.4.1 Schema di funzionamento di un sensore passivo
5.4.2 Meccanismo per la scansione
Molti sistemi utilizzano degli appositi meccanismi al fine di scandire le più ampie zone, pur montando telescopi con un piccolo angolo di vista. Le dimensioni e la massa di questi sistemi è legata principalmente alla grandezza della lente del tele-scopio e dal campo di vista desiderato. Tanto più ampia è l’escursione del teletele-scopio che si vuole ottenere tanto più rilevanti sono gli effetti di distorsione delle fotografie, per cui in fase di progetto si deve tener conto che la realizzazione di un oggetto rela-tivamente compatto può comportare ingenti risorse di calcolo per correggere l’immagine. Quest’operazione, che può essere agevolmente svolta a terra se il siste-ma di gestione è centralizzato, è critica nel caso in cui debba essere svolta a bordo, per esempio se si hanno più utenti finali. Quindi, essendo le dimensioni del meccani-smo legato più a considerazioni geometriche, il tipo di tecnologia usata ha un impor-tanza secondaria, se non per la realizzazione di specchi molto leggeri, cosa del resto molto comune in quanto vengono usati ampiamente specchi realizzati in berillio.
Alcuni casi di requisiti particolari possono portare alla decisione di fornire il movimento al telescopio piuttosto che agli specchi, come nel caso del SeaWiFS in cui questo tipo di soluzione serve a minimizzare la sensitività alla polarizzazione dell’onda che avviene all’estremo della lente. Un'altra implementazione possibile, usata soprattutto per i piccoli satelliti dotati di un unico sensore, è quella di far si che
Scanner Telescopio Separatore spettrale Fotoni Piano focale Apparato criogenico Elettronica Bits Calibrazione a Bordo
sia l’intero satellite ad orientarsi, aumentando la complicatezza del sistema di con-trollo d’assetto per cui diventa quasi indispensabile l’utilizzo di giroscopi, più pesanti delle ruote di reazione, ma in grado di fornire quell’agilità e quella precisione neces-saria per eseguire il corretto puntamento.
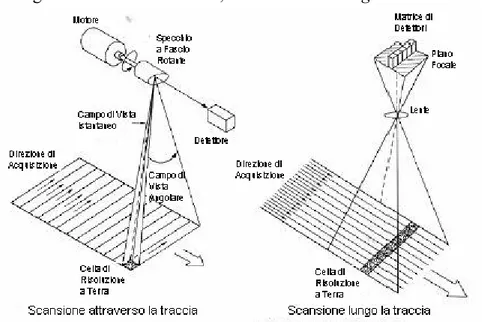
L’acquisizione può essere effettuata sia in modalità attraverso la traccia, in direzione ortogonale alla traccia a Terra, sia in modalità lungo la traccia.
figura 5.4.2 Modi di acquisizione di un sensore passivo
In alcune soluzioni, usate soprattutto nei satelliti geostazionari, grazie alla ca-pacità di osservare ampie zone della Terra, lo specchio rimane fisso e la radiazione viene convogliata tutta su una matrice di rilevatori.
5.4.3 Telescopio
Solo dopo aver eseguito un dimensionamento di prima stima attraverso l’utilizzo delle leggi della diffrazione, è possibile operare delle scelte sulla tecnologia da utilizzare; infatti, per ogni sistema ottico definito da un diametro di lente, da una lunghezza focale e da un livello di prestazioni, è possibile far variare enormemente il numero di elementi ottici, i processi di fabbricazione e le tolleranze d’allineamento. Un esempio è quello riportato nella figura seguente detto telescopio di Cassegrain che a parità di risoluzione garantisce un miglior compattamento dell’intera struttura.
figura 5.4.3 Esempi di diverse configurazioni ottiche specchio ruotante (a sinistra) e telescopio di Cassegrain (a destra)
Molta importanza risiede nella scelta del materiale con cui realizzare la strut-tura portante. L’ultima tendenza è quella di usare materiali compositi con l’aspettativa futura di dimezzare i pesi delle strutture. Alcune tecniche che sembrano promettere bene prevedono di realizzare maggiori aperture focali con lenti di minor grandezza. Alcune implementazioni sono state già realizzate ed hanno portato a delle grosse riduzioni in termini di massa e ingombro.
5.4.4 Separatore spettrale
La tecnologia usata per questo sistema ha importanza solo nel caso di sensori multispettrali in quanto nei sensori con poche bande di acquisizione si usano dei classici filtri composti da strati di materiali aventi proprietà dielettriche diverse. Al-cune soluzioni più avanzate prevedono la disposizione di filtri direttamente sulla ma-trice di rilevatori, consentendo così di diminuire il numero di specchi necessario, co-sa molto utile nei sensori iperspettrali.
5.4.5 Piano focale
In questo settore la tecnologia usata riveste una grande importanza principal-mente per ciò che concerne le dimensioni della lente, fino a quando questa è gover-nata dalla risoluzione spaziale e non dai limiti dovuti alla diffrazione. Le più moder-ne tecniche consentono di realizzare rilevatori dotati di una certa preamplificaziomoder-ne che consente di ridurre i pesi e le potenze di unità elettroniche esterne. Una soluzione molto promettente è quella attualmente allo studio presso alcune università Europee dove sono in fase di messa a punto degli apparecchi per rilevamento che non necessi-tano di filtri spettrali. Per fare ciò sono realizzati con una struttura siliconica amorfa
Lente
Rilevatori Specchio
in maniera da poter variare la sensitività alla lunghezza d’onda attraverso l’applicazione di determinati voltaggi (vedi [11])
figura 5.4.4 figura 5.4.5
5.4.6 Apparato criogenico
L’apparato criogenico è un elemento necessario per quei sensori che operano nelle zone estreme dell’infrarosso. Esistono normalmente due diversi tipi di questi dispositivi denominati, come per i sensori multispettrali, attivi e passivi.
I sistemi passivi sono molto sviluppati ed affidabili, sono in sostanza dei semplici radiatori operanti a bassissime temperatura (circa 90 K); le applicazioni so-no limitate a piccole potenze come nel caso del MODIS, ma sufficienti ad un corretto funzionamento del dispositivo. Naturalmente anche per questi si applicano le regole generali di montaggio di qualsiasi sistema termico, cioè il radiatore deve possibil-mente puntare verso Terra e deve essere sufficientepossibil-mente lontano da potenziali sor-genti di calore. I sistemi attivi, invece, permettono una maggiore flessibilità di mon-taggio a discapito di una maggiore potenza di esercizio.
5.4.7 Elettronica
Gli sviluppi tecnologici nell’elettronica possono portare più di ogni altra cosa, a sostanziali riduzioni di massa e potenza nei sensori. Infatti una grossa parte del si-stema è occupata dall’elettronica necessaria alla preamplificazione, al filtraggio ed alla conversione analogica-digitale. Le vie seguite al giorno d’oggi sono quelle di re-alizzare oggetti sempre più resistenti alle radiazioni e sempre più leggeri grazie all’utilizzo di strutture multistrato ad alta densità.
5.5 Progetto del sistema
5.5.1 Introduzione
Prima di partire con il progetto del sistema è opportuno fornire delle indica-zioni sui principi fisici che sono alla base di queste operaindica-zioni. Come viene illustrato nella figura seguente, lo spettro elettromagnetico si compone di un ampia gamma di radiazioni che va dai raggi gamma, che hanno piccolissime lunghezze d’onda, nell’ordine dell’Ångstroms, fino alle onde radio, di lunghezza d’onda nell’ordine dei km.
.
figura 5.5.1 Spettro d’onda della radiazione elettromagnetica
Per tutti i tipi di radiazione la relazione tra la lunghezza d’onda, λ, e la fre-quenza, ν, è
s m c=λν =2.997924×108
5.5-1 dove c è la velocità della luce nel vuoto. Questa relazione mi dice che in termini di frequenza lo spettro utilizzabile va dai KHz fino ai GHz. A qualsiasi temperatura so-pra lo zero assoluto (0 K) tutta la materia emette continuamente una radiazione, chiamata radiazione termica o radiazione di corpo nero. Per un corpo nero perfetto l’energia totale emessa e la densità di energia per lunghezza d’onda sono funzione solo della temperatura T secondo la legge di Planck
1 1 2 5 2 − = λ λ πλ echkT hc E 5.5-2
dove Eλ è detta irraggiamento spettrale (energia emessa per lunghezza d’onda
misura-ta in W·m-2·µm-1), λ è la lunghezza d’onda, h la costante di Planck (6.6261·10-34W·s2), T la temperatura assoluta , c la velocità della luce e k la costante di Boltzmann (1.381·10-23 W·s/K).
Eλ è quindi una densità di flusso per unità di lunghezza d’onda incidente per
unità di superficie e se viene divisa per l’angolo solido unitario diventa Lλ, la
radian-za spettrale misurata in W·m-2·µm-1·s·rad-1.
Da queste relazioni se ne possono ottenere altre due: la legge di Stefan-Boltzmann che ci fornisce l’emissione radiativa totale Wb (misurata in W/m2)
4
T Wb =σ
5.5-3 dove σ è la costante di Stefan-Boltzmann pari a 5.67051·10-8 W·m-2·K-4, e la legge di
Wein che definisce il luogo dei picchi di radiazione spettrale T / 2898 . 0 max = λ 5.5-4 dove λmax è in cm e T in K.
figura 5.5.2 Legge di Plank e di Wien
Gli strumenti per il osservazione della Terra passivi sfruttano, come già detto, la parte di radiazione emessa dalla Terra per analisi all’infrarosso, mentre, nel visibi-le, sfruttano l’effetto predominante della riflessione della radiazione emessa dal sole.
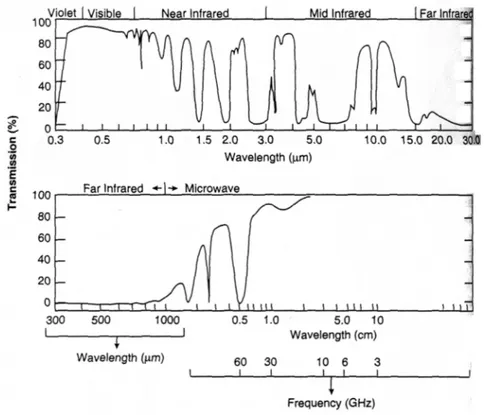
L’intero spettro elettromagnetico presenta però delle ampie fasce poste nel medio infrarosso che vengono rese opache dall’ assorbimento atmosferico come si può ottenere dalla figura 5.5.3 (presa da [1]).
figura 5.5.3 Spettro d’assorbimento dell’atmosfera
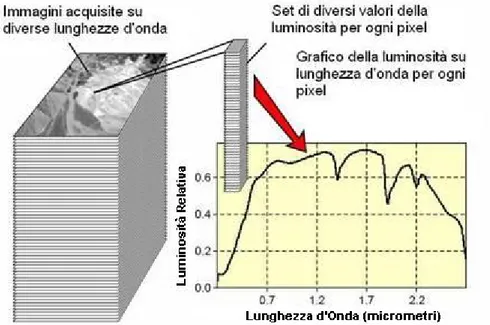
I sensori multispettrali riescono a distinguere numerose lunghezze d’onda all’interno dell’intervallo di lavoro attraverso cui viene costruita un immagine fittizia della zona osservata; ogni lunghezza d’onda viene quindi campionata su una scala di luminosità relativa. Segue che per ogni pixel dell’immagine si può ottenere un grafi-co luminosità - lunghezza d’onda.
figura 5.5.4 Schema del processo di acquisizione dell’immagine
Abbiamo così descritto due parametri che distinguono un sistema dall’altro: la risoluzione radiometrica, con cui si intende la capacità di distinguere più livelli di luminosità, e la risoluzione spettrale, cioè la capacità di distinguere il maggior nume-ro di lunghezze d’onda possibili.
L’analisi viene quindi effettuata confrontando i dati ottenuti con le librerie di riflettività dei singoli materiali. Si riportano come esempio alcuni di questi database tratti da [12].
figura 5.5.5 Spettro d’assorbimento per i minerali.
Per i minerali la capacità di riflessione è legata alla composizione chimico elettro-nica, dalla presenza di particolari elementi e dalla configurazione cristallina
figura 5.5.6 Spettro d’assorbimento per le piante.
Le piante sono distinte tra loro dalla presenza di clorofilla, che nel visibile assorbe meno il verde, e dall’emissione nell’infrarosso più o meno marcata a causa di fenomeni di disuguale
trasmissio-ne del calore tra i diversi strati e tipi di fogliame.
(Librerie fornite dalla NASA grazie a l’Advanced Spaceborne Thermal Emission and Reflection
Radiometer (ASTER). 5.5.2 Stima configurazione generale
Partendo dall’orbita scelta (a = 6667.916 km, e = 0, i = 46°) da principio si va a vedere come deve essere fatto il meccanismo per il movimento del sensore in maniera che siano soddisfatti i requisiti di copertura spaziale.
La geometria del problema è espressa nella figura seguente insieme con le re-lative formule trigonometriche.
+ = − h R R E E 1 sin ρ 5.5-5
( )
(
ρ)
λ cos 1 sin 0 = − 5.5-6 ε π − = 2 IA 5.5-7 λ ⋅ ⋅ = RE Swath 2 5.5-8 ϑ ε π λ= − − 2 5.5-9 ε π − = 2 IA 5.5-10 λ ⋅ ⋅ = RE Swath 2 5.5-11 Nei seguenti grafici sono stati riportati le variazioni dei suddetti elementi in funzione della grandezza dell’angolo di vista θ. La scelta di quest’angolo dipende dai requisiti di copertura previsti, va, cioè, dimensionato in modo da non lasciare zone scoperte durante il ciclo di ripetizione della traccia a terra, che da richiesta è tre gior-ni, ed in maniera che si garantisca una larghezza di area di scansione opportuna.figura 5.5.8 Andamento degli angoli di elevazione e apertura a terra in funzione dell’angolo di vista del sensore
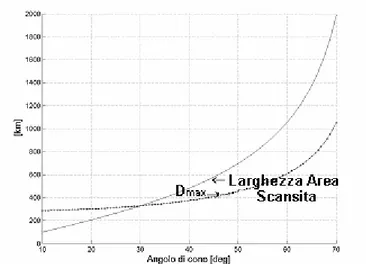
figura 5.5.9 Andamento della distanza massima e della dimensione dell’area scandita in funzio-ne dell’angolo di vista del sensore
Questo primo problema non è di immediata soluzione in quanto la scelta ef-fettuata di volare a bassa quota limita notevolmente la capacità visiva del nostro strumento, come del resto i grafici illustrano chiaramente; infatti da essi si può rica-vare come la capacità visiva a Terra dello strumento aumenti quasi esponenzialmente con l’aumentare dell’apertura del cono di vista e come d’altro canto aumenti, anche se in modo minore, la distanza tra il satellite e il punto osservato. Quest’ultimo parti-colare non è di poco conto in quanto effettuare delle osservazioni ai limiti del campo visivo comporta la presenza di distorsioni nell’immagini, che vanno successivamente corrette attraverso appositi algoritmi di trattamento delle immagini, di peggioramento delle risoluzioni ottenibili, vista la distanza notevolmente maggiore, e di altri errori dovuti al fatto che la radiazione elettromagnetica attraversa una porzione maggiore di atmosfera.
Alcune analisi, effettuate anche con l’ausilio del propagatore orbitale STK, hanno permesso, quindi, di scegliere la soluzione presentata in tabella 5.5-1 con i re-lativi parametri calcolati.
tabella 5.5-1 Angolo di vista scelto
Θ [deg] ε [deg] λ [deg] Dmax [km] Larghezza Area Scandita [km] IA [deg]
33 55.2 1.7 341 373 35
La capacità visiva dello strumento viene garantita da un meccanismo a spec-chio orientabile, scelta ampiamente realizzabile e di comune uso nella maggior parte di questi apparati.
• la capacità visiva scelta non comporta grossi meccanismi;
• i requisiti fondamentali, tra cui principalmente la copertura totale, so-no stati rispettati;
• i valori di λ e Dmax sono tali da non produrre grosse perdite di
presta-zioni agli estremi del campo visivo.
In una fase di progetto successiva bisognerà prestare un’attenzione più apfondita al meccanismo orientabile in quanto non può venire, a questo livello di pro-gettazione, ancora stimato il suo impatto sul bilancio di massa e potenza dello stru-mento.
5.5.3 Stima dell’ottica del sistema
La risoluzione spaziale di uno strumento ottico è la capacità di distinguere più o meno bene i dettagli. Nell’osservazione della Terra ciò si traduce nella capacità di vedere porzioni piccole della superficie, per cui viene comunemente espressa in ter-mini delle dimensioni dell’oggetto più piccolo che può essere distinto sullo sfondo. A prescindere dalla qualità delle lenti, una fondamentale limitazione della risoluzione è la diffrazione, la flessione in cui incorre la luce quando passa agli spigoli di un qual-siasi sistema ottico. Anche per un sistema perfetto la diffrazione produce che l’immagine di una sorgente di luce sufficientemente lontana appare sul piano focale non come un punto, ma come una serie di cerchi concentrici che si espande verso l’esterno diminuendo di luminosità. La distanza angolare θr, espressa in radianti, tra
il massimo al centro dell’immagine fino al primo anello nero di interferenza, chiama-to limite di Rayleigh, è dachiama-to da
D
r λ
ϑ =1.22
5.5-12 dove λ è la lunghezza d’onda e D è il diametro d’apertura dello strumento ottico.
Il disco di luce contenuto all’interno del primo anello di interferenza contiene l’84% dell’energia totale che arriva sul piano focale dalla sorgente di luce e, inver-tendo la formula, si può ottenere l’espressione del diametro minimo necessario per ottenere la risoluzione desiderata. Nell’implementazione di un sistema ottico usando una matrice di rilevatori viene usato un ulteriore parametro, Q, detto fattore di quali-tà, definito come il rapporto tra le dimensioni del pixel, d , ed il diametro d’ del pri-mo disco di diffrazione, nadir ris X d d Q≡ / '= , 5.5-13
dove X è la dimensione del pixel a terra ,e risnadir è la risoluzione ottenibile.
Per un satellite ad una quota h, la risoluzione a Terra al nadir viene ricavata per mezzo di focale ne osservazio nadir Diam Q h ris = 2.44⋅λ⋅ ⋅ 5.5-14 con Q = 1.1 (valore consigliato).
Gli ulteriori parametri di vista del sensore sono illustrati nella figura seguente.
figura 5.5.10 Parametri di vista del sensore
Con l’IFOV (istantaneous field of view, campo di vista istantaneo) ottenibile tramite
h ris
IFOV = nadir .
5.5-15 Si ossono ottenere anche risymax, la risoluzione agli estremi del campo visivo in senso
max
max IFOV D
risy = ⋅
5.5-16 e risxmax, la risoluzione agli estremi del campo visivo in senso parallelo alla traccia a
terra
( )
IA ris ris y x cos max max = 5.5-17 ed infine NA D f F 2 1 #= = 5.5-18 l’arresto di campo, dove NA è detta numerical aperture, apertura numerica; entrambi questi parametri riguardano solo l’ottica del sistema e sono un indice della sua com-pattezza dimensionale.La scelta del diametro focale ha un grosso impatto, come sarà chiaro nelle formule successive, sulla stima delle dimensioni, della massa e della potenza assorbi-ta dello strumento, per cui, come linea guida primaria, è opportuno minimizzare al massimo le dimensioni della lente, pur cercando di non compromettere troppo le pre-stazioni del sistema. Andando a considerare l’utilizzo di due sensori, uno ad alta riso-luzione nel visibile e uno multispettrale, resta da predisporre la parte ottica affinché non si verifichi un’eccessiva diffrazione nella parte dello spettro elettromagnetico u-tilizzato, che può essere sostanzialmente divisa in tre zone di interesse:
• VIS 0.3-0.8 µm • NMIR 1-4 µm • TIR 8-12 µm
escludendo così tutta la fascia intermedia che viene assorbita quasi totalmente dall’atmosfera.
In tutte queste tre zone viene condotta la ricerca di una soluzione di compro-messo, andando a graficare la relazione esistente tra le risoluzioni ottenibili ed il diametro della lente.
figura 5.5.11 Risoluzioni ottenibili in funzione del diametro focale
Per ottenere ora una stima relativamente affidabile degli apparati da imbarca-re occorimbarca-re scalaimbarca-re le sue dimensioni da strumenti già esistenti e imbarca-relativamente simili. Gli strumenti di riferimento sono elencati nella tabella 5.5-2
tabella 5.5-2 Strumentazione di riferimento
ALI Advanced Land Imager Multi-spectral MID-IR Diamrif [m] 0.7 1 Lunrif [m] 0.9 1.5 Potrif [W] 100 800 Pesrif [kg] 100 900
Il primo sistema, l’ALI, è la naturale evoluzione del Thematic Mapper presen-te sui primi esemplari della serie Landsat ed è in grado di fare acquisizione ad alta risoluzione fino alle lunghezze d’onda del vicino infrarosso; il secondo sistema è un po’ più vecchio, utilizzato anche esso su alcune versioni del Landsat ma che si avvi-cina molto, come funzionamento, al sensore multispettrale che è stato ipotizzato es-sere adeguato allo scopo, in quanto dotato di apparati criogenici per il raffreddamen-to dell’elettronica in maniera da distinguere meglio l’intensità della radiazione, molraffreddamen-to meno intensa nel lontano infrarosso (si ricordi la figura 5.5.2), dall’intrinseco rumore di fondo.
Per scalare il sensore si definisce prima un parametro di scala rif foc foc Diam Diam R= 5.5-19 che è il rapporto tra i diametri della lente focale del nostro strumento e quello di rife-rimento tramite il cui si calcolano poi
rif Lun R Lun= ⋅ 5.5-20 2 Lun Sup= 5.5-21 rif Pot R K Pot = ⋅ 3⋅ 5.5-22 rif Peso R K Peso= ⋅ 3⋅ 5.5-23 dove K = 0.5 se R < 2 o K = 1 altrimenti.
Nella seguente figura è quindi rappresentato l’andamento dei suddetti valori rispetto al diametro focale
figura 5.5.12 Andamento delle grandezze caratteristiche del sensore in funzione del diametro focale
Altre limitazioni sull’ottica del sistema provengono dalla capacità dell’apparato di comunicazione; infatti l’area che il satellite è capace di vedere du-rante il suo passaggio può essere suddivisa in tanti pixel quadrati di lato pari alla ri-soluzione massima, come fatto nella seguente figura
figura 5.5.13 Caratterizzazione dell’area scandita
dove Zc, il numero di pixel in senso trasversale alla traccia, Za/s, il numero di
pixel osservati in un secondo, e 2θ, il doppio dell’angolo di vista, sono ottenibili tra-mite le seguenti relazioni
y p a ris Vel Z max sec 1 ⋅ = 5.5-24 IFOV Zc = 2⋅ϑ 5.5-25 in cui Velp è la velocità della posizione del satellite lungo la traccia.
Con questi dati è possibile esprimere il flusso di dati proveniente dal sensore, DR, considerando che l’acquisizione viene fatta su tre lunghezze d’onda dal sensore nel visibile, e su 20 lunghezze d’onda dal multispettrale (Nscansioni), con una
risolu-zione radiometrica, come da requisito, pari a 11 bits (Nbits)
scansioni bits a c Z N N Z DR= ⋅ ⋅ ⋅ 5.5-26
figura 5.5.14 Capacità di acquisizione in funzione del diametro focale
I valori ottenuti e riportati nella figura qui sopra sono molto elevati. Sicura-mente non verrà installato un apparato di comunicazione sufficienteSicura-mente grande e potente da consentire l’invio a Terra di una mole così elevata di dati. C’è però da dire che questi dati si riferiscono all’ipotesi che il satellite acquisisca durante tutti i pas-saggi ruotando le lenti da un estremo all’altro del campo visivo, in realtà il sistema è pensato per operare solo su precise richieste, che indicheranno di volta in volta la zo-na da osservare. Un ulteriore precisazione riguarda il tipo di informazioni di cui si parla, i dati grezze riportati in figura 5.5.14 si riferiscono al fatto che non vengono considerati eventuali pretrattamenti delle immagini, come algoritmi di compressione o di correzione geometrica. Per cui le precedenti informazioni sono da prendere co-me valori di riferico-mento per poter valutare in prima approssimazione gli effetti delle dimensioni della lente, e, quindi, della risoluzione ottenibile, sulla quantità che se ne ricava.
5.5.4 Stima dell’elettronica del sistema
Una volta scelto il diametro fondamentale segue la conoscenza della risolu-zione massima raggiungibile da cui possiamo determinare come nella figura seguente la forma della matrice di rilevatori
figura 5.5.15 Metodo di acquisizione
in cui Nx e Ny sono le dimensioni della matrice dei rilevatori utilizzata, e quindi le
dimensioni della singola immagine; con questi dati si riesce a ricavare
bande y x image N N bits N Data = ⋅ ⋅11 ⋅ 5.5-27 che è la mole di dati per ogni immagine,
x c riprese N Z N = 5.5-28 che indica il numero di immagini da acquisire per ottenere una copertura completa da un estremo all’altro del campo di vista totale.
Lo sfasamento che si ottiene in senso parallelo alla traccia, dovuto al fatto che il satellite viaggi ad una certa velocità, è
d a Z Y = ⋅ ⋅τ ∆ 2 sec 1 5.5-29 per cui possiamo esprimere, in percentuale sulla dimensione dell’ immagine, quanto vale la sovrapposizione che si ha tra due immagini consecutive lungo la traccia del satellite 100 1 ⋅ ∆ − = y N Y Overlap . 5.5-30
Dati sulle caratteristiche dei rilevatori, e sulle matrici, sono reperibili nella letteratura specializzata e su alcuni siti internet di aziende operanti nel settore
Ad esempio, per quelli usati nel campo del visibile disponiamo dei dati posti in tabella 5.5-2 dove nxy indica la dimensione della singola cella della matrice, QEmax
(Quantum Efficiency, Efficienza dei Quanti) è un indice dell’efficienza nel rilevare i fotoni e τd è il tempo di esposizione minimo a cui dobbiamo sottoporlo per avere una
corretta rilevazione.
tabella 5.5-3 Dati su alcuni rivelatori nel campo del visibile attualmente in commercio
Produttore Nx Ny nxy [µm] QEmax [%] τd [µs]
TI 1 800 800 15 80 TI 2 1024 1024 15 45 Fairchild 128 1024 20 30 GE 244 380 30 35 Thomson-CSF 576 384 23 50 GEC 576 385 22 30 GEC 1500 1500 23 50 Itek 96 2048 13 50 Tektronix 1 2048 2048 27 80 Tektronix 2 512 512 27 80 Site 2048 2048 12 80 10-2
Per quanto riguarda i rilevatori operanti, invece, nell’infrarosso abbiamo la tabella 5.5-4, analoga alla precedente, dove appare, però, anche la temperatura tipica di eser-cizio.
tabella 5.5-4 Dati su alcuni rilevatori per l’infrarosso attualmente in commercio Materiale (Produttore) Banda di utilizzo [µm] Nx Ny nxy [µm] T [K] τd [µm] InSb 128 128 100 77 0.2 InSb 1024 1 100 77 0.2 InSb 64 2 40 77 0.8 HgCdTe 256 256 100 195 0.8 HgCdTe 3-5 512 30 100 195 0.8 SiIn 64 64 65 50 100 SiIn 3-7 1024 1 65 50 100 HgCdTe 256 256 100 77 0.8 HgCdTe 1024 1 100 77 0.8 HgCdTe 288 4 25 77 0.8 SiGa 64 64 75 30 5 SiGa 8-10 1024 1 75 30 5 HgCdTe (SR) 0.3-10 248 4 28 90 19 CCD47-10 (E2V) 0.3-10 1024 1024 13 90 0.3 CCD30-11 (E2V) 0.3-10 256 1024 26 90 0.2
In seguito è necessario graficare l’impatto che ha la scelta del tipo di strumen-to sul sistema.
figura 5.5.16 Risultati ottenuti nel campo del visibile.
In senso orario: numero immagini per una copertura completa, sovrapposizione, arresto di campo e flusso di dati
figura 5.5.17 Risultati ottenuti nel campo NMIR.
In senso orario: numero immagini per una copertura completa, sovrapposizione, arresto di campo e flusso di dati
figura 5.5.18 Risultati ottenuti nel campo TIR.
In senso orario: numero immagini per una copertura completa, sovrapposizione, arresto di campo e flusso di dati
5.6 Caratterizzazione del sistema
5.6.1 Risultati dell’analisi
Il sistemo da scelto è, dunque, caratterizzato dai valori dei parametri riportati nelle seguenti tabelle.
tabella 5.6-1 Ottica del sistema PL 1 PL 2 PL 3 D [m] 0.38 0.25 Banda [µm] 0.4-0.8 0.8-4 4-10 Rismax [m] 1.6 10 25 IFOV [deg] 0.00001 0.0007 0.0019 Risymax [m] 1.92 12.2 31 Risxmax [m] 2.34 15 37 Lun [m] 0.48 0.45 Sup [m2] 0.23 0.21
Pes [kg] 15 48.6 + 0.6 per criogenico Pot [W] 16 43 + 10 per criogenico
Vol [m3] 0.11 0.09
DR [Gbit/s] 10 0.3 0.04
tabella 5.6-2 Elettronica del sistema
PL 1 PL 2 PL 3
Produttore Sira CCD47-10
Banda [µm] 0.4-0.8 0.3-10
Configurazione 2048 X 2048 1024 X 1024
F# 4.8 0.5
Numero Immagini per un
completo “cross-scanning” 50 18
Dimensioni singola immagine 3 km X 3 km 12 km X 12 km 31 km X 31 km DR singola immagine
[Mbit] 115 230
Scelta che ha seguito le seguenti considerazioni:
• il diametro non deve appesantire troppo l’ottica del sistema;
• il DR molto elevato deve essere controbilanciato da un opportuno algoritmo di compressione;
• il valore di F# dev’essere il più basso possibile in modo da, a parità di diame-tro focale, porre il fuoco il più vicino possibile alla lente, e quindi da compat-tare l’intero apparato ottico;
• il sistema dev’essere dotato di una meccanismo in grado di orientare il senso-re all’interno del suo campo visivo; la semplicità di questo sistema è legata alla grandezza della matrice dei rilevatori, e quindi alla grandezza dell’area acquisita;
• la dimensione della singola immagine presa è limitata superiormente dalla capacità dell’impianto di trasmissione a Terra.
5.6.2 Scelta effettuata
Per quanto riguarda la definizione dello strumento multispettrale è possibile seguire due alternative:
• utilizzare un solo sensore che copra tutte le lunghezze d’onda tra 0.3 mm e 10 mm;
• imbarcare due sensori dedicati rispettivamente al VIS-MIR ed al TIR.
La prima soluzione induce all’utilizzare il sensore CRISA, sviluppato dalla Siraelectro-optics, che riesce a fare acquisizioni su tutto lo spettro d’onda di interes-se. I principali dati caratteristici dello strumento sono riportati qui di seguito, corretti per l’utilizzo sulla nostra piattaforma.
Nome
CHRIS
Peso 14 kg
Potenza 10 W
Risoluzione radiometrica 11 bits
Risoluzione spaziale alla nostra quota 9 m
Risoluzione spettrale 10 lunghezze d’onda
Area scandita 6 km x 6 km
Dimensione immagine 131 Mbits
Range spettrale 4 µm - 10 µm
Volume mm3 790 x 260 x 200
figura 5.6.1 CHRIS
La seconda soluzione consiste nel separare il sensore in due sottoparti, anche per queste ci riferiamo a prodotti già presenti in commercio e già imbarcati per mis-sioni spaziali. Carico pagante 1
Nome
HYPSEO
Peso 30 kg Potenza 10 W NE∆T 0.5 KRisoluzione spaziale alla nostra quota 2 m
Range spettrale 0.3µm - 1 µm figura 5.6.2 HYPSEO Carico pagante 2
Nome
CIM 01
Peso 5.5 kg Potenza 6 W NE∆T 0.5 KRisoluzione spaziale alla nostra quota 60 m
Area scandita 16 km x 16 km
Range spettrale 8 µm - 14 µm
Volume mm3 260 x 130 x 400
figura 5.6.3 CIM 01
L’Hypseo è un progetto realizzato dalla Galileo Avionica con ottimo rapporto prestazioni/dimensioni; il secondo sistema invece è prodotto dalla EADS SODERN per il satellite NASA-CNES, che acquisisce agli estremi dell’infrarosso senza la
ne-cessità di un apparato criogenico grazie all’utilizzo di particolari rilevatori; questo ultimo sistema è dotato, inoltre, di un sistema per l’auto calibrazione sviluppato per una vita utile di tre anni.
La scelta che sembra migliore è quindi quella di utilizzare il CHRISA in quanto dispositivo molto compatto e dalle ottime prestazioni.
Per quanto riguarda il sensore operante nel campo del visibile non si trovano informazioni dettagliate e puntuali per cui si fa riferimento ai calcoli effettuati in pre-cedenza, tenendo conto del fatto che la tecnologia odierna consente di realizzare og-getti con caratteristiche anche migliori.
5.7 Requisiti di puntamento e di posizionamento
Al momento di fare acquisizione, il satellite, quasi sicuramente non si troverà nella posizione giusta e con l’assetto adatto ad un esecuzione ottimale dell’operazione. A seguito di ciò, una volta scelti i sistemi per l’acquisizione, bisogna analizzare la sensibilità ad eventuali errori su questi due parametri. Questi problemi, inoltre, risultano di particolare importanza nel caso qui dibattuto, in quanto, vista la bassa quota di volo scelta, il satellite ne è maggiormente influenzato.
Innanzitutto elenchiamo i vari possibili tipi di errore.
• Errori di posizionamento del satellite: provengono da un certo sfasamento tra la posizione che ci si aspetta che il satellite abbia, calcolata tramite un propa-gatore orbitale con l’ausilio dei dati forniti dal sistema di navigazione, e la posizione che il satellite realmente occupa:
¾ ∆l: errore di posizionamento lungo la traccia del satellite o, meglio, pungola direzione indicata dal vettore velocità.
¾ ∆C: errore di posizionamento trasversalmente alla traccia a terra del satellite.
¾ ∆RS: errore di posizionamento lungo la verticale terra-satellite.
• Errori nell’orientamento degli assi del satellite: anche questi derivano da de-viazioni tra l’assetto previsto e l’assetto reale assunto dal satellite, ma anche da eventuali errori di montaggio dei sensori o dalla stabilità del satellite in fa-se di acquisizione:
¾ ∆η: errore nell’angolo di elevazione assunto. ¾ ∆Φ: errore nell’angolo di azimuth assunto. • Altri errori possono provenire da :
figura 5.7.1 Errori di posizionamento del satellite
Per quantificare l’effetto che questi errori possono avere su una corretta ac-quisizione dell’immagine, si fa ricorso alle relazioni in tabella 5.7-1.
Utilizzando le formule presenti nella stessa tabella è possibile determinare l’entità degli errori in funzione dell’angolo di elevazione tra il satellite e il punto os-servato.
tabella 5.7-1 Relazioni per la determinazione degli errori di posizionamento e assetto
Come si vede da figura 5.7.3 non si presentano grossi problemi per quanto ri-guarda l’assetto del satellite perché, qualsiasi sia l’elevazione del satellite, è possibile mantenere l’errore molto basso anche utilizzando un sistema di controllo d’assetto non particolarmente preformante.
Invece, come si può notare in figura 5.7.2, le cose cambiano radicalmente per quanto riguarda l’errore di posizione; in questo caso, l’ effetto maggiore è dato dall’errore in direzione normale alla traccia che, se assunto di soli 80 metri, causa un errore massimo di circa 4 km, errore paragonabile alle dimensioni delle immagini acquisite. Questo vuol dire che, nelle condizioni peggiori, il satellite va ad acquisire una zona completamente diversa da quella prefissata. Questo effetto ci porta alla scelta obbligata di utilizzare un sistema di navigazione esterno di tipo commerciale
Errore Grandezza dell’errore Grandezza dell’errore di posi-zionamento [km] Grandezza dell’errore di puntamento [rad] Direzione dell’errore Errore nell’assetto
Azimuth ∆Φ (rad) ∆ΦDsen(η) ∆Φsen(η) Azimutale
Angolo di
Nadir ∆η (rad) ∆ηD/sen(ε) ∆η
Verso il Nadir
Errore nella posizione
Lungo la
traccia ∆l (km) ∆l· (RT/RS) ·cos(H) ∆l/D·sen(Yl)
Parallelo al-la traccia a Terra Normale alla
traccia ∆C (km) ∆C· (RT/RS) ·cos(G) ∆C/D·sen(YC)
Normale al-la traccia a Terra Radiale ∆RS (km) ∆RS·sen(η)/sen(ε) ∆RS·sen(η)/D
Lungo il nadir Altri errori Altezza dell’obiettivo ∆RT (km) ∆RT/tan(ε) Lungo il nadir Note: sen(H)= senλ·senΦ sen(G)= senλ·cosΦ cos(Yl)= senη·cosΦ cos(YC)= senη·sinΦ
(vedi capitolo 11) in grado di fornire la posizione del satellite con una precisione nell’ordine del metro.
figura 5.7.2 Bilancio di errore nel posizionamento
Infine i pro e i contro della precedente analisi rispetto ad una missione tradi-zionale possono essere sintetizzati nella seguente tabella.
tabella 5.7-2 Pro e contro della configurazione adottata
Scelta effettuata Vantaggi Svantaggi
Bassa quota opera-tiva
• Migliori prestazioni ottiche da parte di strumenti realizzati per quote più elevate.
• A parità di prestazioni minori di-mensioni,massa e potenze assorbi-te.
o Ampiezza delle aree scan-dite leggermente inferiore. o Requisiti di posizionamento
più elevati.
o Implementazione di sistemi ottico-meccanici relativa-mente più complessi.
Orbita circolare
Maggiore omogeneità delle immagini acquisite in termini di messa a fuoco e qualità dell’immagine.
Risoluzione
adotta-ta Migliore qualità dell’immagine.
Complicazioni nella capacità di gestione e invio dei dati.
Sensore multispet-trale (CHRIS)
Ottime prestazioni per la missione ipo-tizzata.
Necessità di riqualificare il si-stema per la nostra missione.
Sensore operante