1
Introduzione
Le esperienze di realt`a virtuale, nel campo visivo ed acustico, sono oggigiorno diffusis-sime e notevolmente sofisticate, grazie alle conoscenze acquisite in questi campi. Per quanto riguarda la riproduzione della percezione tattile, invece, i dispositivi al mo-mento realizzati sono ancora lontani da una sintetizzazione completa dell’esperienza tattile reale; `e per questo che, negli ultimi anni, la comunit`a scientifica ha mostrato un crescente interesse verso questo fenomeno.
Quando si tocca un oggetto, se ne riceve un’enorme quantit`a di informazioni, sia attra-verso il canale cinestetico, cui compete la percezione del movimento (forze, velocit`a), che quello cutaneo, che invece riguarda la cedevolezza, la forma e la temperatura dei corpi; l’insieme di queste informazioni si definisce esperienza aptica. I dispositivi ap-tici attualmente in commercio sono in realt`a dei dispositivi esclusivamente cinesteap-tici, e coinvolgono quindi solo una parte dell’apparato sensoriale del soggetto; ci`o `e senza dubbio dovuto sia alle oggettive difficolt`a tecnologiche da affrontare, sia al fatto che ancora troppo poco `e conosciuto sul canale percettivo cutaneo.
Nella letteratura degli ultimi anni (ad esempio [1] e [7]), si `e fatta sempre pi`u strada
la congettura, avallata anche da studi psicofisici e neurofisiologici combinati, che le informazioni tattili e quelle ottiche, almeno entro certi limiti, siano elaborate a livello
neurale in modo molto simile, differenziandosi solamente nelle fasi pi`u avanzate
dell’at-tivit`a cerebrale. In questo senso `e stata proposta l’ipotesi che esista un Flusso Tattile, come controparte del Flusso Ottico ormai sufficientemente accreditato. Tale proposta ha gi`a trovato riscontro in una serie di campagne di esperimenti tattili e visivi effet-tuati o ancora in corso, che si avvalgono anche della risonanza magnetica funzionale; in particolare, si `e analizzata una serie di ben note illusioni ottiche, giustificabili dal modello del Flusso Ottico, realizzandone il corrispondente tattile.
Il lavoro svolto nella presente tesi si inserisce all’interno di questo contesto e si pone come obiettivo la predisposizione di un modello agli elementi finiti di polpastrello uma-no per lo studio dei feuma-nomeni di percezione tattile in generale, ed in particolare per la valutazione quantitativa del Flusso Tattile.
Come prima applicazione del modello, sono stati simulati gli esperimenti pubblicati su Nature da Robles-De-La-Torre e Hayward in un interessante articolo del 2001 [7].
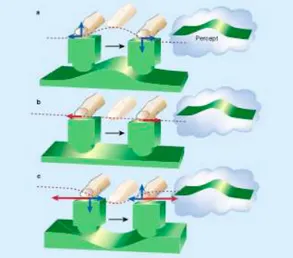
Gli autori hanno chiesto ad un gruppo di volontari di far scorrere su di una superficie orizzontale senza attrito una slitta, posizionata al di sotto del polpastrello del loro dito indice, e di dire se percepivano una superficie piatta, un dosso (bump) o una buca (hole). La superficie poteva contenere un dosso o una buca reali o virtuali, ovvero ge-nerati mediante un dispositivo in grado di manipolare la componente orizzontale della forza trasferita al polpastrello dall’appoggio ma senza interferire con il corrispondente movimento verticale del polpastrello. Piuttosto sorprendentemente, nei soggetti `e stata riscontrata la netta tendenza a riconoscere la forma toccata in accordo con l’andamento delle forze imposto piuttosto che con il cammino realmente tracciato dal polpastrello.
Figura 1.1: L’esperimento di Robles-De-La-Torre e Hayward
2
Stato dell’arte
La struttura ed il comportamento del polpastrello dei primati sono molto complessi a causa della forma irregolare dei vari tessuti sovrapposti di cui `e costituito ed a causa dei tessuti stessi che presentano caratteristiche meccaniche non lineari, anisotropia e dipendenza dal tempo. In letteratura si trovano due proposte di modelli semplifica-ti di polpastrello sviluppasemplifica-ti con intensemplifica-ti simili a quelli del presente lavoro: il modello “waterbed” ed il modello “continuum”. Sono entrambi modelli bidimensionali che rap-presentano una sezione frontale del polpastrello imponendo uno stato di deformazione di tipo plane strain, utilizzano entrambi materiali lineari elastici indipendenti dal tem-po, ma offrono prestazioni complementari.
volume di acqua [2], Srinivisan nel 1989 [9] e Serina et al. nel 1998 [8] hanno sviluppato un modello di polpastrello, il “waterbed”, costituito da una sottile membrana elastica esterna, che rappresenta l’epidermide, all’interno della quale `e racchiuso un fluido in pressione, incomprimibile e non viscoso, il tessuto sottocutaneo appunto. I risultati ot-tenuti predicono con buona accuratezza la deformazione reale sotto carico, ma si sono rivelati del tutto inadeguati per rappresentare lo stato di tensione e di deformazione nel tessuto sottocutaneo.
Nel modello “continuum”, proposto da Phillips e Johnson nel 1981 [5], da Srinivasan e Dandekar nel 1996 [10] e da Maeno et al. nel 1998 [4], la sezione frontale del polpa-strello `e rappresentata da una sequenza di strati di materiali omogenei, isotropi, lineari
ed elastici. I vari strati costituiscono i pi`u importanti elementi anatomici presenti
nel polpastrello ovvero, partendo dal pi`u interno: osso, tessuto sottocutaneo, derma,
epidermide e, sulla parte superiore, unghia. Questo tipo di modello si `e dimostrato inadeguato a rappresentare la deformata del polpastrello sotto carico, tuttavia predice con buona accuratezza lo stato di tensione e di deformazione nel polpastrello, in par-ticolare in corrispondenza dei meccanorecettori di maggiore interesse.
I meccanorecettori, suddivisi in quattro differenti tipologie, sono i principali respon-sabili della percezione tattile. Nelle ultime tre decadi, mediante studi psicofisici e neurofisiologici combinati, si `e ottenuta una mappa abbastanza completa delle funzioni specifiche che competono a ciascuno dei quattro tipi di afferenti che innervano la mano e la percezione tattile nel suo complesso pu`o essere compresa come la somma di queste funzioni. Per gli scopi specifici di questo lavoro interessano in particolar modo le celle di Merkel poich´e sono quelle che vengono direttamente stimolate: sono i
meccanore-cettori con la struttura pi`u semplice, costituiti da celle particolari che circondano le
terminazioni degli afferenti di tipo SA1, situate al confine tra epidermide e derma. Nel polpastrello dell’uomo e della scimmia sono diffusi in modo molto denso: circa 100 per
cm2
. La banda di stimoli cui sono sensibili `e 0.3 −3 Hz; essi inoltre sono selettivamente sensibili alla densit`a di energia di deformazione, o a qualche altra combinazione scalare dello stato di deformazione ad essa strettamente collegato. La funzione che ricoprono gli SA1 per il tatto `e simile a quella del sistema visivo fotopico, cio`e tipico della visione diurna, con sensibilit`a non elevata ma con range dinamico e risoluzione molto ampi.
3
Modello agli elementi finiti
In accordo a quanto visto relativamente allo stato dell’arte, si `e deciso di sviluppare un modello di tipo “continuum” che rappresenti una sezione frontale del polpastrello comprendente osso, pelle (a sua volta ulteriormente suddivisa in tessuto sottocutaneo, derma e epidermide) ed unghia. Le caratteristiche meccaniche da attribuire ai singoli strati sono state prese dalla letteratura e sono le seguenti: modulo di Young dell’osso - 17.0 GP a; modulo di Young dell’unghia - 170.0 MP a; coefficiente di Poisson (per
en-trambi) - 0.30 [11]; modulo di Young dell’epidermide - 1.36 ∗ 105
P a; modulo di Young
del derma - 8.0 ∗ 104
P a; modulo di Young del tessuto sottocutaneo - 3.4 ∗ 104
P a; coef-ficiente di Poisson della pelle - 0.48 [4].
Il modello `e stato per semplicit`a realizzato di forma circolare, concentrandosi sulla coe-renza delle grandezze introdotte con quelle disponibili in letteratura relativamente alla parte inferiore del polpastrello, ovvero alla zona in cui avviene in contatto.
L’approssi-mazione dei risultati ottenuti sar`a dunque tanto pi`u buona quanto pi`u si `e prossimi alla
zona di contatto, e tanto pi`u grossolana quanto pi`u si `e lontani da essa. Poich´e lo scopo
del presente lavoro `e di investigare ci`o che avviene in prossimit`a dei meccanorecettori, che sono concentrati nella zona bassa del polpastrello, tale approssimazione si ritiene in definitiva accettabile.
Per meglio simulare il comportamento reale del polpastrello durante la tastazione at-tiva, `e stata inoltre aggiunta un’asta (molla) di materiale lineare elastico per schema-tizzare l’articolazione del dito collegata al nodo centrale del polpastrello. Infine `e stata ovviamente modellata la piastra su cui poggia il polpastrello stesso durante l’esperi-mento. Il contatto `e stato assunto con attrito, con coefficiente d’attrito pari a 0.9; tale valore `e stato intenzionalmente scelto alto, in modo da garantire che non ci fosse scorrimento tra polpastrello e piastra di appoggio durante la simulazione.
Per il calcolo agli elementi finiti `e stato utilizzato il programma commerciale ANSYSr. Per il polpastrello e la pista di contatto sono stati utilizzati elementi quadrilateri piani a quattro nodi PLANE 42, aventi due gradi di libert`a per nodo, in regime di plane strain; si `e deciso di utilizzare lo stesso elemento per tutti gli strati, variando di volta in volta solo le propriet`a dei materiali. Per simulare l’articolazione `e stato utilizzato un
di seguito. Infine, dovendo risolvere un problema di contatto, i nodi del polpastrello e della pista sono stati opportunamente collegati mediante elementi di tipo CONTACT 12 2-D Point-to-Point Contact, ovvero elementi che collegano la parte in avvicinamento ed il target punto per punto.
Il modello `e stato realizzato in modalit`a bottom-up con introduzione diretta di nodi ed elementi da file di testo. Tutte le grandezze considerate sono state parametrizzate in modo da poter intervenire a piacimento sulla mesh e soprattutto da poterla oppor-tunamente infittire nelle zone di maggiore interesse; in particolare per questo lavoro
gli elementi pi`u piccoli sono stati localizzati nel derma all’interfaccia con l’epidermide,
dove si trovano le celle di Merkel. Per quanto riguarda il comportamento all’interfac-cia tra materiali diversi, si `e ipotizzato che non ci fossero n´e scorrimento relativo n´e distaccamenti o compenetrazioni; si `e dunque assunto di poter collegare elementi di materiale diverso agli stessi nodi. Si fa notare che questa assunzione introduce a ri-gore un’approssimazione nella stima della tensione all’interfaccia tra materiali diversi, non dando in uscita l’andamento a gradino atteso ma calcolando un valore mediato. Tuttavia, per i materiali biologici in questione, non si pu`o considerare che ci sia una separazione netta tra i diversi strati, e quindi il valore mediato `e stato intenzionalmente
accettato perch´e pi`u realistico.
Per quanto riguarda la piastra, poich´e per il presente lavoro non interessa il suo com-portamento, essa `e stata inserita esclusivamente per visualizzare il target del contatto e si `e quindi cercato di limitarne il numero di elementi. Tuttavia, avendo scelto di adoperare elementi di contatto point-to-point, `e stato necessario un certo infittimento nella zona di contatto, dovendo adattare la mesh a quella del polpastrello. In direzione radiale, lo spessore della pista `e stato arbitrariamente preso di 7.5 mm, in modo da essere sicuri che potesse essere considerata infinitamente rigida rispetto al polpastrello anche flessionalmente.
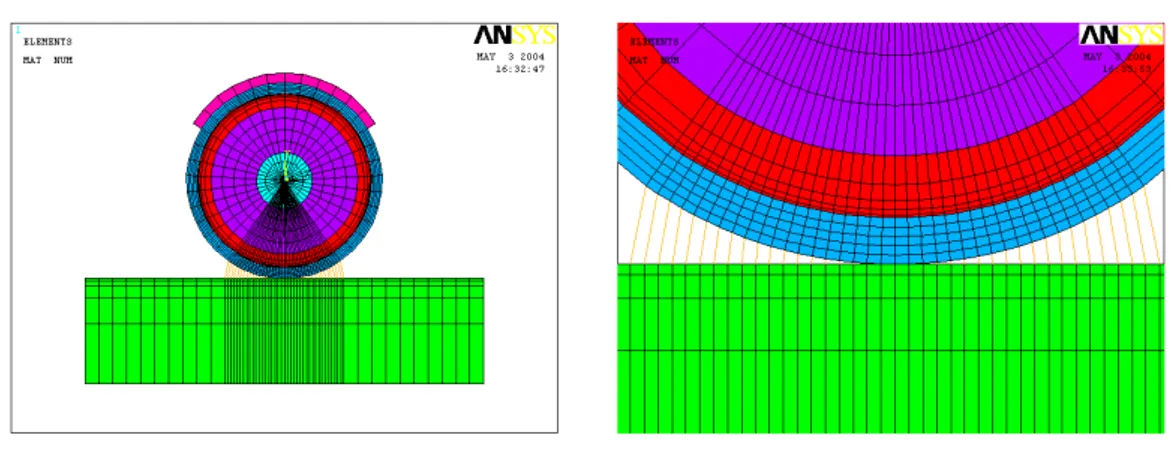
In definitiva il modello si presenta come riportato nella figura 3.1, in cui a colori diversi corrispondono materiali diversi.Tale modello `e formato da 1629 nodi e da 1498 elementi
complessivi; la dimensione degli elementi nella zona di contatto di circa 0.034 mm2
, mentre la striscia esterna del derma in cui sono localizzati i meccanorecettori `e spessa circa 0.05 mm.
Figura 3.1: Modello agli EF e particolare della zona di contatto
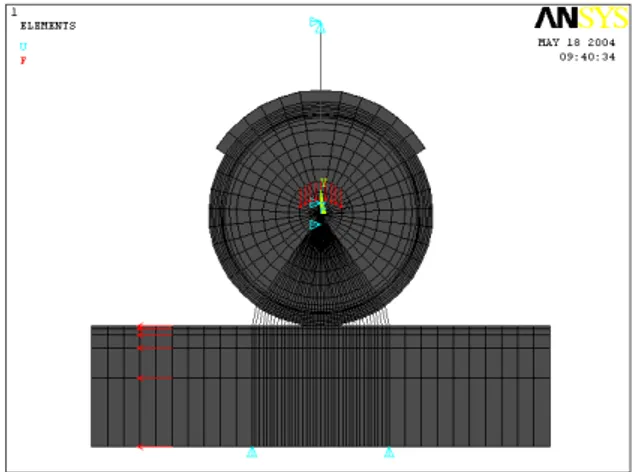
Come anticipato, `e stato necessario introdurre un’asta (molla) che schematizzasse l’ar-ticolazione del dito poich´e si `e notato che il comportamento del polpastrello `e molto cedevole durante la prima fase dell’appoggio sulla superficie da tastare, dopodich´e si irrigidisce raggiungendo una sorta di saturazione della deformazione, che il modello elaborato non `e per`o in grado di considerare; si `e stimato che tale saturazione avven-ga all’incirca dopo un avvicinamento di 2 − 2.5 mm del polpastrello alla superficie di contatto. La rigidezza dell’asta schematizzante l’articolazione `e dunque stata scelta in modo da essere di un ordine di grandezza minore rispetto alla rigidezza del polpastrello, valutata in corrispondenza della deformazione di saturazione; adottando tale scelta si `e quindi fatto in modo che per spostamenti superiori la deformazione fosse assorbita prevalentemente dall’articolazione piuttosto che dal polpastrello. Per fare ci`o `e stato necessario stimare preliminarmente la rigidezza del polpastrello, mediante i risultati ot-tenuti da una simulazione con ANSYSr in cui il polpastrello `e stato sottoposto ad un carico distribuito applicato sulla parte rigida del modello (l’osso). In un intorno della deformazione di saturazione, il valore di rigidezza cercato `e risultato K = 0.113 N/mm. In definitiva, valendo per la rigidezza delle aste la relazione K = E ∗ A/L (in cui E `e il modulo di Young del materiale con cui `e realizzata l’asta stessa, A `e la sezione retta dell’asta ed L `e la lunghezza) ed imponendo per semplicit`a che il rapporto A/L fosse unitario, il modulo di Young assegnato al materiale dell’asta `e E = 0.011 MP a. Infine, per l’applicazione di carichi e vincoli, si nota innanzitutto, come risulta evidente dalla figura 3.1, che la situazione di partenza considerata `e per cos`ı dire una situazione “instabile” ed `e quindi necessario introdurre una deformazione iniziale, comune a tutti
lizzata imponendo un carico verticale alla parte rigida del polpastrello, ovvero ai nodi della parte superiore della corona esterna dell’osso, analogamente a quanto visto per la determinazione della rigidezza del polpastrello. Il carico `e stato imposto in modo che la forza di contatto risultasse di 0.15 N; tale valore `e stato assegnato misurando con un dinamometro di precisione la forza esercitata nel tastare una superficie da diversi soggetti. Si `e scelto di assumere il valore medio di 0.15 N, ma preme qui far notare che la dispersione dei dati a riguardo `e notevole, sia da un soggetto all’altro che per uno stesso soggetto; ci`o non stupisce, poich´e `e impossibile pensare di mantenere il polpa-strello (e il braccio e tutte le articolazioni) perfettamente fermo durante l’esperimento, nonch´e di appoggiarlo sempre allo stesso modo.
Passando alle simulazioni vere e proprie, si `e notato che si pu`o trascurare di descrivere il moto di traslazione del dispositivo sul piano, avvenendo questo senza attrito. Questa considerazione semplifica notevolmente l’analisi da effettuare, riducendola di fatto alla valutazione dei soli spostamenti verticali della piastra di contatto. Si `e quindi imposto alla piastra lo spostamento verticale corrispondente al pattern fisico in esame (noto poich´e gli autori stessi hanno fornito le funzioni del profilo del dosso e della buca uti-lizzati: gaussiana con altezza-profondit`a massima di 3 mm e ampiezza 4 cm), mentre le forze tangenziali sono state modulate sulla base del pattern virtuale. Il modello `e stato inoltre vincolato in direzione verticale ed orizzontale, assegnando vincoli a spostamento
imposto nullo al nodo superiore dell’asta ed alla corona pi`u interna dei nodi dell’osso.
La situazione `e schematizzata in figura 3.2.
Tutte le combinazioni di superfici reali e virtuali in esame sono state prese in esame.
4
Risultati
Per l’analisi dei risultati, ci si `e concentrati sui nodi e gli elementi della corona esterna del derma localizzati nella zona di contatto, ovvero sugli elementi all’interno dei quali si trovano le celle di Merkel. Essendo i recettori sensibili alla densit`a di energia di defor-mazione, o ad una combinazione scalare della stato di deformazione ad essa collegata, si `e scelta per comodit`a come grandezza rappresentativa dell’output di ANSYSr la deformazione equivalente definita, in analogia con la tensione equivalente di Von Mises
σeqv, dalla formula ǫeqv = Eσeqv, in cui E `e il modulo di Young del materiale.
Il flusso (ϕx, ϕy) viene calcolato risolvendo l’equazione ∂ǫeqv ∂x ϕx+ ∂ǫeqv ∂y ϕy+ ∂ǫeqv ∂t = 0 (4.2)
nella zona di interesse. Nel presente lavoro, per motivi di semplicit`a sia concettuale che computazionale, si `e deciso di valutare le varie grandezze al centro degli elementi selezionati (la corona sopra descritta); si noti che, in tal modo, l’equazione (4.2) risulta in effetti una sequenza di equazioni disaccoppiate per ogni elemento (centro).
Le derivate ∂ǫeqv
∂x e
∂ǫeqv
∂y sono calcolate in base alle formule standard
dell’approssimazio-ne mediante FE [12] relativamente alla configuraziodell’approssimazio-ne deformata degli elementi, mentre le derivate temporali sono ricavate in accordo con le formule dei tre punti [6].
Il calcolo finale delle componenti ϕx e ϕy del flusso `e effettuato ricorrendo alla
pseudo-inversa (che fornisce, tra le infinite soluzioni possibili, quella di norma minima). Tutte le operazioni di post-processamento sopra descritte sono implementate in un programma scritto nel codice MATLABr , che provvede anche a generare l’output grafico presentato.
Nelle figure che seguono `e riportato l’andamento delle componenti del flusso relativa-mente agli elementi nei quali si riscontra il picco (in norma) del flusso durante la storia di carico; tali elementi sono situati regolarmente uno a destra e l’altro a sinistra della zona di contatto.
Figura 4.1: Componenti del flusso - caso BUMP percepito - lato destro 5 6 7 8 9 10 11 12 13 14 15 −6 −4 −2 0 2 4 6
Storia del flusso nell’elemento 393
Tempo Flusso (componenti) Componente x Componente y 5 6 7 8 9 10 11 12 13 14 15 −5 −4 −3 −2 −1 0 1 2 3 4 5
Storia del flusso nell’elemento 393
Tempo Flusso (componenti) Componente x Componente y 5 6 7 8 9 10 11 12 13 14 15 −5 −4 −3 −2 −1 0 1 2 3 4
Storia del flusso nell’elemento 393
Tempo
Flusso (componenti)
Componente x Componente y
Figura 4.2: Componenti del flusso - caso BUMP percepito - lato sinistro
5 6 7 8 9 10 11 12 13 14 15 −8 −6 −4 −2 0 2 4
Storia del flusso nell’elemento 1118
Tempo Flusso (componenti) Componente x Componente y 5 6 7 8 9 10 11 12 13 14 15 −4 −3 −2 −1 0 1 2 3
Storia del flusso nell’elemento 1118
Tempo Flusso (componenti) Componente x Componente y 5 6 7 8 9 10 11 12 13 14 15 −5 −4 −3 −2 −1 0 1 2
Storia del flusso nell’elemento 1118
Tempo
Flusso (componenti)
Componente x Componente y
Figura 4.3: Componenti del flusso - caso HOLE percepito - lato destro
5 6 7 8 9 10 11 12 13 14 15 −8 −6 −4 −2 0 2 4
Storia del flusso nell’elemento 389
Tempo Flusso (componenti) Componente x Componente y 5 6 7 8 9 10 11 12 13 14 15 −4 −3 −2 −1 0 1 2 3
Storia del flusso nell’elemento 389
Tempo Flusso (componenti) Componente x Componente y 5 6 7 8 9 10 11 12 13 14 15 −5 −4 −3 −2 −1 0 1 2
Storia del flusso nell’elemento 389
Tempo
Flusso (componenti)
Componente x Componente y
Figura 4.4: Componenti del flusso - caso HOLE percepito - lato sinistro
5 6 7 8 9 10 11 12 13 14 15 −3 −2 −1 0 1 2 3 4 5 6 7
Storia del flusso nell’elemento 1118
Tempo Flusso (componenti) Componente x Componente y 5 6 7 8 9 10 11 12 13 14 15 −2 −1 0 1 2 3 4 5
Storia del flusso nell’elemento 1118
Tempo Flusso (componenti) Componente x Componente y 5 6 7 8 9 10 11 12 13 14 15 −3 −2 −1 0 1 2 3 4 5
Storia del flusso nell’elemento 1118
Tempo
Flusso (componenti)
Componente x Componente y
Si pu`o notare come, in tutti i casi esaminati, le curve ottenute siano qualitativamente confrontabili, ad indicare che l’informazione preminente `e quella fornita dalle forze in
gioco piuttosto che dalla geometria del percorso seguito, in accordo con quanto rilevato sperimentalmente.
5
Conclusioni
In questo lavoro `e stato approntato un modello agli elementi finiti per lo studio della percezione tattile, con lo scopo di migliorare la comprensione del funzionamento del senso del tatto. Le analisi eseguite ed il conseguente post-processamento dei risultati, basato sul modello computazionale del Flusso Tattile, nonostante le approssimazioni necessariamente introdotte in questa fase preliminare e la specificit`a del problema af-frontato, sembrano confermare le ipotesi di fondo ed incoraggiano la prosecuzione e l’approfondimento degli studi in questa direzione.
Riferimenti bibliografici
[1] Bicchi A., Dente D. and E.P. Scilingo (2003), Conf. Proc. EuroHaptics, pp. 314-329.
[2] Fawcett D.W. (1986), A textbook of Histology, 11th ed., Saunders, Philadelphia. [3] Johnson K.O., Yoshika T. and Vega-Bermudez F. (2000), J. Clin. Neurophysiol.,
17, pp. 539-558.
[4] Maeno T., Koboyashi K. and Yamazaki N. (1998), JSME Int. J., 41, pp. 94-100. [5] Phillips J.R. and Johnson K.O. (1981), J. Neurophysiol., 46, pp. 1204-1225. [6] Pica A. (2001), Calcolo Numerico, S.E. Esculapio, Bologna.
[7] Robles-De-La-Torre G. and Hayward V. (2001), Nature, 412, pp. 445-448.
[8] Serina E.R., Mockensturm E., Mote C.D. Jr. and Rempel D. (1998), J. Biomech., 31, pp. 639-646.
[9] Srinivasan M.A. (1989), J. Biomech., 22, pp. 343-349.
[10] Srinivasan M.A. and Dandekar K. (1996), J. Biomech. Eng., 118, pp. 48-55. [11] Yamada H. (1970), Strenght of biological materials, Williams and Wilkins Co.,
Baltimore.