Universit`a degli Studi di Pisa Facolt`a di Ingegneria
Centro Interdipartimentale di Ricerca “Enrico Piaggio”
TESI DI LAUREA SPECIALISTICA IN INGEGNERIA DELL’AUTOMAZIONE
Studio teorico e progettuale di un braccio
robotico intrinsecamente sicuro
Relatori: Prof. Ing. A. Bicchi Ing. F. Frendo
Candidato: Rosi Alessandro
SOMMARIO - Il presente lavoro tratta della sicurezza in ambito roboti-co, argomento di cui si deve necessariamente tener conto nella progettazione sia meccanica che controllistica di robot che interagiscono con l’uomo. In partico-lare, lo studio `e effettuato su una struttura robotica antropomorfa con attuatori a cedevolezza variabile, strumenti estremamente efficaci nell’ottimizzazione del com-promesso tra prestazioni e sicurezza. Da un punto di vista controllistico, lo scopo principale di questo lavoro consiste nella determinazione di una strategia di gestio-ne delle rigidezze dei giunti che sia ottima secondo un criterio di minimizzaziogestio-ne del tempo di task : questa ricerca `e effettuata in un primo momento tramite strumenti numerici di ottimizzazione, che per la loro complessit`a, per`o, non possono essere implementati sulla struttura in tempo reale; in seguito, in base a questi risultati, viene proposto un algoritmo di controllo sub-ottimo decisamente pi`u semplice. Nella parte finale, poi, si pu`o trovare un progetto meccanico del manipolatore in questione: la struttura si basa su trasmissioni a tendini d’acciaio, per consentire il posizionamento dei motori alla base, con conseguente riduzione delle inerzie. Viene quindi proposta una nuova implementazione meccanica dell’attuatore VSA (Vari-able Stiffness Actuator), caratterizzata dall’introduzione degli elementi cedevoli lungo i tendini.
ABSTRACT -This thesis deals with safety in Robotics, a fundamental top-ic in the design of manipulators interacting with people. An antropomorphtop-ic arm with variable stiffness actuators is studied, which is intended to optimize perfor-mance/safety trade-off. In the first part of this work, control aspects are taken in consideration: the aim is to find a control strategy which is optimal with respect to a minimum time criterion. The optimal mechanical/control codesign problem is solved numerically to gain insight in the problem and drive subsequent devel-opments. However, due to the complexity of the numerical implementation, this solution is not suitable for real time implementation. Therefore a simpler sub-optimal control switching algoritm is proposed and tested in simulation. Finally, a mechanical design of the manipolator is described, in which safety is enhanced by reducing inertia and using a tendon-based variable stiffness transmission.
Introduzione
Questo lavoro tratta dei problemi legati alla sicurezza nei manipolatori roboti-ci. Tale argomento `e fondamentale soprattutto nell’ambito della Robotica di Servizio, settore sempre pi`u in espansione in cui non `e pi`u possibile garanti-re l’incolumit`a dell’operatogaranti-re semplicemente evitando con segnalazioni visive ed acustiche l’interazione fisica con la macchina automatica, come in ambito industriale, ma in cui il robot nasce proprio con lo scopo di interagire con l’uomo, sia in applicazioni ludiche che di supporto all’attivit`a umana. Per questo `e essenziale garantire un certo livello di sicurezza durante l’esecuzione di un movimento.
Esistono attualmente due approcci a questo problema in Robotica: l’Active Compliance, ovvero l’implementazione di misure di sicurezza nel sistema di controllo, a livello di software, e la Passive Compliance, che prevede l’uti-lizzo di materiali leggeri, rivestimenti e trasmissioni cedevoli per garantire l’intrinseca sicurezza del manipolatore. Il primo approccio `e chiaramente pi`u facile da implementare rispetto al progetto di un robot che sia meccanica-mente sicuro, ma di contro presenta notevoli problemi dovuti soprattutto alla discretizzazione del sistema di controllo. Per questo, strumenti come il controllo di forza sono considerati poco efficaci nel garantire la sicurezza dei manipolatori e non verranno analizzati in questo lavoro.
La tesi affronta il problema della progettazione di un manipolatore che sia intrinsecamente sicuro e che permetta di ottimizzare il compromesso tra prestazioni e sicurezza.
Sicurezza e prestazioni
Per stabilire i vincoli di sicurezza dobbiamo introdurre un indice che descri-va oggettidescri-vamente la dannosit`a di un eventuale urto tra il manipolatore ed un operatore. Dal momento che il punto pi`u pericoloso per un uomo `e la testa, ci affidiamo al criterio detto HIC (Head Injury Criterion), utilizzato anche nell’industria automobilistica per esaminare i risultati dei test
d’im-patto. Dalla sua formula si nota la dipendenza dell’indice di danno dalle accelerazioni subite dal corpo urtato in seguito alla collisione.
Per quanto riguarda la quantificazione delle prestazioni, il criterio utilizzato riguarda il tempo minimo di esecuzione del task assegnato: un manipolatore che esegua una operazione pi`u rapidamente di un altro, nel rispetto dei vin-coli di sicurezza, viene considerato pi`u performante. Lo strumento utilizzato per determinare il controllo ottimo (MTOC, Minimum Time Optimal Con-trol) per una particolare struttura `e il cosiddetto Brachistocrono Sicuro, che verr`a risolto numericamente tramite opportuni algoritmi di ottimizzazione.
Metodi di attuazione orientati alla sicurezza
Iniziamo la trattazione andando ad esaminare i vari metodi di attuazione presenti in letteratura che offrono dei vantaggi dal punto di vista dell’ot-timizzazione del trade-off prestazioni/sicurezza.
Tra le architetture studiate in precedenza per questi scopi, le pi`u efficaci
risul-(a) SEA (b) DM2
Figura 1: Rappresentazione schematica e modello fisico dell’architettura SEA. tano il SEA (Series Elastic Actuator ) e il DM2 (Distributed Macro Mini). Il primo nasce come approccio al controllo di forza, e consiste nell’introduzione di un elemento cedevole all’interfaccia tra il motore ed il link, come mostrato nel modello schematico di figura 1(a): in questo modo l’inerzia del rotore, che a causa della presenza dei riduttori di velocit`a risulta molto maggiore rispetto a quella del link, viene filtrata e il trasferimento di energia al corpo urtato risulta pi`u graduale, con conseguente diminuzione dell’indice di dan-no; la molla, d’altro canto, costituisce per`o un filtro passa-basso anche per il
controllo, andando perci`o a peggiorare le prestazioni. Il DM2, invece, il cui modello `e mostrato in figura1(b), nasce come evoluzione del SEA ed `e com-posto da due motori per giunto, di cui uno di grosse dimensioni `e posizionato alla base ed `e filtrato tramite una molla, mentre l’altro, di piccole dimensioni e con basse riduzioni, `e connesso direttamente al giunto con trasmissione rigi-da. Le coppie del SEA di base sono perci`o in bassa frequenza (perch´e filtrate dalla molla) e sostengono tutto il carico principale, mentre le coppie del mo-tore al giunto sono in alta frequenza e di piccola entit`a, cos`ı da permettere piccole correzioni al movimento senza aumentare troppo l’inerzia vista da un operatore eventualmente urtato.
L’approccio al quale si riallaccia questo lavoro `e invece il cosiddetto VIA (Variable Impedance Approach), il cui principio di funzionamento prevede di poter variare uno o pi`u tra i parametri della trasmissione, ovvero la rigidezza, lo smorzamento e il rapporto di riduzione. Lo schema fisico `e mostrato in figura 2. L’architettura viene chiamata VST (Variable Stiffness Transmis-sion) nel caso in cui l’unico controllo sia la rigidezza, mentre viene chiama-ta VDT (Variable Damping Transmission) nel caso si possa variare solo lo smorzamento.
Figura 2: Modello fisico di un sistema VIA.
La risoluzione del Brachistocrono Sicuro per i vari modelli mostra che l’ar-chitettura pi`u efficiente, regolando opportunamente i parametri, risulta essere il VST, come si vede in figura3.
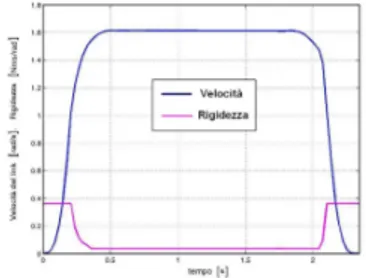
In questo caso, il controllo ottimo risulta essere quello mostrato in figura 4: quando il link si muove lentamente, la rigidezza deve essere alta per per-mettere la trasmissione della coppia necessaria per l’accelerazione, viceversa quando la velocit`a `e alta la rigidezza deve essere bassa per mantenere
con-(a) Confronto SEA-DM2 (b) Confronto DM2-VST
Figura 3: Risoluzione del Brachistocrono Sicuro: la figura mostra gli andamenti del tempo minimo in funzione della costante elastica della trasmissione nel caso del SEA, della rigidezza del motore di base nel caso del DM2, della rigidezza media ¯σ del range
ammissibile, compreso tra uK,min= (1 − α)¯σ e uK,max= (1 + α)¯σ, nel caso del VST.
Figura 4: Controllo ottimo per una struttura VST.
tenuto il livello di danno. In base a questi risultati un controllo sub-ottimo `e stato generato, nei lavori precedenti, per permettere l’implementazione on-line dell’algoritmo di gestione delle rigidezze: da prove sperimentali si ot-tengono i dati necessari per interpolare il valore di HIC in funzione della velocit`a del link e della rigidezza della trasmissione; quindi si determina il legame tra la rigidezza e la velocit`a necessario per ottenere HIC massimo, ed in ogni istante del task si cerca di regolare la stiffness secondo tale funzione calcolata per la velocit`a attuale del link.
Una ulteriore architettura `e stata poi studiata in questa sede: si tratta di una attuazione che prevede il trasferimento di coppia dal motore al link tramite
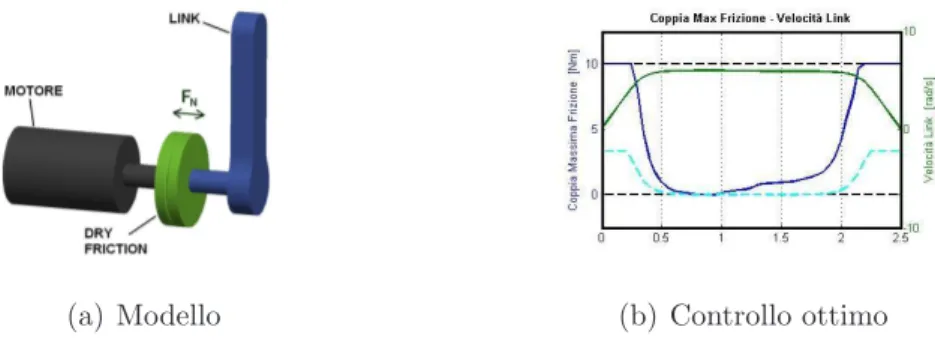
una Variable Dry Friction, ovvero una frizione della quale possiamo arbi-trariamente variare la forza normale tra le due parti. Il concetto consiste nell’utilizzare tale frizione come una specie di fusibile meccanico, che in ca-so di un ca-sovraccarico di coppia, dovuto ad un urto, permetta di separare i sistemi dinamici del motore e del link. In figura 5 sono mostrati lo schema fisico del sistema e il risultato del Brachistocrono Sicuro, dal quale si pu`o osservare che la strategia di controllo ottima consiste nel regolare la massima coppia trasmissibile appena al di sopra della coppia calcolata all’interfaccia tra i due dischi della frizione (linea celeste tratteggiata). Purtoppo problemi tecnologici limitano l’implementazione di un simile meccanismo.
(a) Modello (b) Controllo ottimo
Figura 5: Modello e risultato del Brachistocrono Sicuro per l’architettura VDF.
Controllo ottimo a 3 d.o.f.
Il lavoro principale di questa tesi ha riguardato l’estensione del problema della sicurezza ad una struttura antropomorfa a tre gradi di libert`a. In un primo momento sono stati considerati gli aspetti legati alla gestione delle rigidezze ottimale per minimizzare il tempo di task rispettando i vincoli di sicurezza, in seguito `e stato studiato un possibile design meccanico del robot. In primo luogo consideriamo la particolare struttura analizzata: dal momen-to che gli assi degli ultimi due giunti sono paralleli tra loro e perpendicolari a quello del primo, `e possibile effettuare una semplificazione del problema. Si pu`o infatti ipotizzare che il primo giunto possa essere considerato
sepa-ratamente dagli altri due: il danno provocato da un urto nello spazio tra un punto della struttura e un operatore dipende infatti dalla velocit`a lineare di tale punto, che pu`o essere scomposta in due componenti, una perpendi-colare al piano contenente la struttura planare composta dagli ultimi due link, l’altra parallela a tale piano. La prima componente dipende solo dal-la velocit`a angodal-lare del primo giunto e l’inerzia vista dall’operatore in tale direzione non varia con le ultime due rigidezze, per cui `e possibile regolare la prima costante elastica indipendentemente dalle altre due; `e vero anche il viceversa, ovvero che un urto nel piano suddetto non risente n´e della velocit`a n´e della rigidezza del primo giunto, per cui le ultime rigidezze possono essere considerate a parte.
Controllo del primo giunto
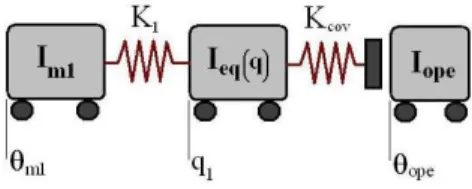
Se consideriamo solo la velocit`a del primo giunto, mantenendo nulle le ve-locit`a degli altri due, ci troviamo di fronte ad un problema ad un grado di libert`a, nel quale per`o l’inerzia della struttura varia con la configurazione. Anche la distanza d tra il punto pi`u pericoloso, ovvero quello pi`u lontano, e l’asse del primo giunto varia con la configurazione, ed in particolare tale pun-to `e sempre o il gomipun-to o l’end-effecpun-tor. Considerando il corpo urtapun-to come incernierato intorno all’asse del primo giunto ad una distanza d, si ottiene il seguente sistema di equazioni dinamiche, che descrive il modello di figura6:
Figura 6: Modello fisico della struttura considerando solo il primo giunto. Ieq(q) ¨q1 = K1(θm1− q1) Im1θ¨m1 = τ1− K1(θm1− q1) (1)
con
Ieq(q) = I1 + M2b22 cos2(q2) + M3[a2 cos(q2) + b3 cos(q2+ q3)]2, (2)
dove Imi e Ii sono le inerzie dei rotori (a valle delle riduzioni) e dei link; Ki `e
la costante elastica del giunto i-esimo; θmi e qi sono le posizioni angolari dei
vari motori e link; gli altri sono parametri geometrici della struttura.
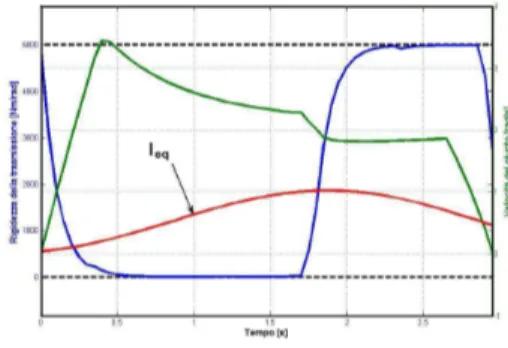
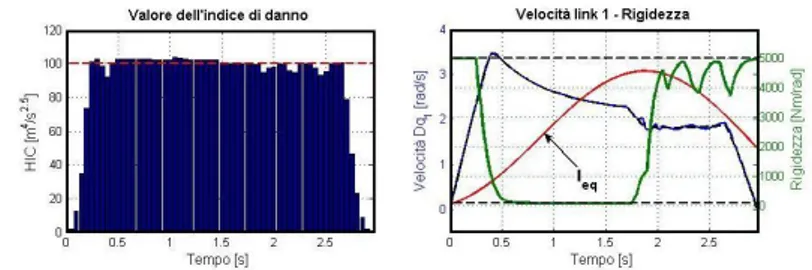
Per determinare il controllo ottimo, risolviamo numericamente il Brachisto-crono Sicuro per un task in cui le ultime due variabili di giunto seguono una traiettoria casuale, ottenendo la sequenza di controlli di figura 7. Si nota
Figura 7: Risultato del Brachistocrono Sicuro per la gestione del primo giunto (la linea blu rappresenta le rigidezza, quella verde la velocit`a e quella rossa l’inerzia equivalente).
come la traiettoria ottima dipenda fortemente dall’andamento della confi-gurazione del manipolatore: la velocit`a massima nel primo tratto, infatti, `e pi`u alta di quella nel secondo, a causa dell’aumento di Ieq. L’andamento
trapezoidale della velocit`a non `e perci`o pi`u ottimale, come nel caso ad un solo grado di libert`a.
E’ possibile, anche in questo caso, determinare un algoritmo sub-ottimo di re-golazione delle rigidezze pi`u semplice da implementare in tempo reale, basato sull’acquisizione di dati off-line, ricavati o con simulazioni o con esperimen-ti, e sulla loro successiva interpolazione in funzione delle variabili correnti del sistema in modo da ottenere l’HIC massimo consentito. Utilizzando la traiettoria ottima in uscita dal Brachistocrono, si ottengono con l’algoritmo sub-ottimo gli andamenti simulati di figura8.
Figura 8: Andamenti ottenuti utilizzando l’algoritmo sub-ottimo.
Controllo degli ultimi due giunti
Lo studio della struttura composta dagli ultimi due giunti `e decisamente pi`u complesso, in quanto le due rigidezze non possono essere controllate indipen-dentemente. Innanzitutto si pu`o dimostrare che il punto pi`u pericoloso della struttura `e nuovamente uno tra il gomito e l’organo terminale. Studiando le equazioni dinamiche degli urti in questi due punti, `e quindi possibile ot-tenere, per particolari posizioni e velocit`a dei link, due superfici di HIC in funzione delle due rigidezze.
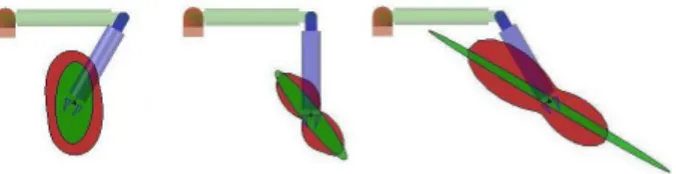
Analizziamo il caso in cui l’urto al giunto sia sicuro per tutte le rigidezze pos-sibili: in questa situazione ci troviamo di fronte ad un problema ridondante, di una equazione in due incognite. Per determinare una soluzione ottimale a questo problema risolviamo il Brachistocrono Sicuro per una operazione in cui vincoliamo solo l’HIC all’end-effector: i risultati sono mostrati in figura9. Nella figura viene mostrato anche l’andamento dell’ellissoide di rigidezza della struttura, figura geometrica utilizzata anche negli studi anatomici del braccio umano: si nota come la traiettoria ottima cerchi di massimizzare l’angolo tra l’asse maggiore di tale figura e la direzione della velocit`a dell’end-effector. La strategia suggerita dal Brachistocrono permette di massimizzare la rigidezza, e quindi di minimizzare gli errori posizionali, nella direzione perpendicolare alla velocit`a dell’end-effector. La correlazione tra l’ellissoide di stiffness e l’HIC di un urto nelle varie direzioni d’impatto `e mostrata in figura 10: `e intuitivo che dove la rigidezza vista `e maggiore, sar`a maggiore anche l’HIC.
Figura 9: Risultato del Brachistocrono Sicuro per la struttura a 2 d.o.f., considerando solo l’urto all’end-effector: sulla destra `e mostrato l’andamento dell’ellissoide di stiffness durante l’esecuzione del task (le linee verdi e celesti delimitano il cono entro cui `e possibile posizionare l’asse minore dell’ellisse).
Figura 10: Correlazione tra l’ellissoide di stiffness (in verde) e la figura geometrica che descrive l’HIC nelle varie direzioni d’impatto (in rosso).
Non sempre per`o l’urto al gomito pu`o essere trascurato, e spesso ci possiamo trovare di fronte a situazioni diverse da quella analizzata finora. Purtroppo la complessit`a dell’algoritmo di risoluzione del Brachistocrono non ha permesso di utilizzare tale strumento per gli altri casi possibili, per`o un algoritmo di controllo delle rigidezze presumibilmente vicino all’ottimo, ed implementabile on-line, `e stato comunque generato e simulato per vari task. L’algoritmo `e di tipo switch ed `e schematizzato in figura 11: il sistema di controllo interpola i dati di HIC ricavati fuori linea, in funzione delle variabili attuali, ed esami-nando le due superfici HICgomito(K2, K3) e HICee(K2, K3), a seconda della
situazione in cui ci troviamo, sceglie una strategia diversa, che in generale si basa sulla risoluzione numerica di un sistema non lineare.
Figura 11: Diagramma di flusso dell’algoritmo di controllo sub-ottimo.
I risultati delle simulazioni effettuate con questo algoritmo sono mostrati
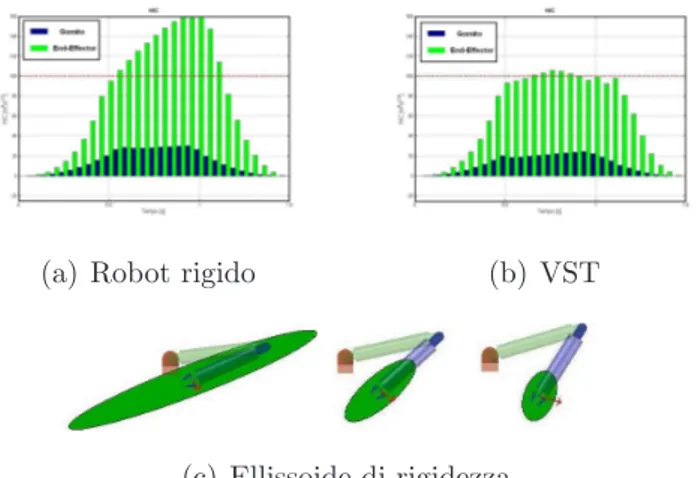
(a) Robot rigido (b) VST
(c) Ellissoide di rigidezza
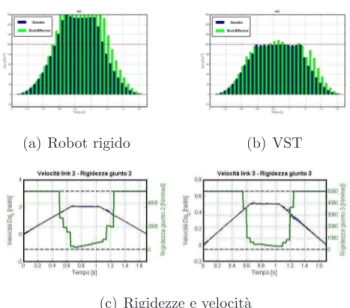
Figura 12: Andamenti del livello di HIC e dell’ellissoide di rigidezza per il primo task. nelle figure12e13. La prima operazione prevede sempre un livello di rischio del gomito contenuto, per cui la strategia cerca di limitare l’HIC all’end-effector mantenendo l’ellissoide di rigidezza quanto pi`u possibile perpendico-lare alla direzione della velocit`a, mentre nel secondo task, sia il gomito che l’end-effector vanno considerati nella determinazione delle rigidezze.
(a) Robot rigido (b) VST
(c) Rigidezze e velocit`a
Figura 13: Andamenti del livello di HIC e dei controlli per il secondo task.
Design meccanico del robot
Per quanto riguarda gli aspetti meccanici di una struttura come quella ana-lizzata finora, viene in questa sede proposto un progetto completo (mostrato in figura 14). Per garantire una struttura leggera e con inerzie contenute
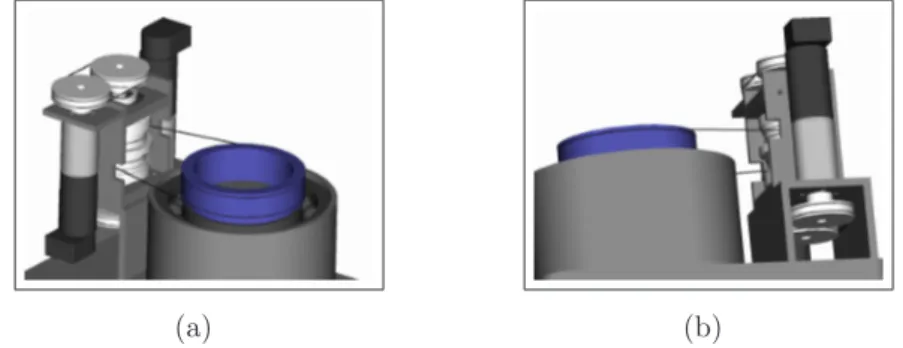
dobbiamo necessariamente trovare una soluzione che permetta di posizionare i motori alla base, dal momento che per ottenere tre giunti a cedevolezza variabile c’`e bisogno di sei motori, due per giunto. L’implementazione tipica di un attuatore VST, infatti, `e con due motori in configurazione antagonista. Per il primo giunto si `e scelto di utilizzare un dispositivo gi`a studiato e co-struito, il VSA II, che sfrutta il principio della biella-manovella per ottenere le caratteristiche non-lineari delle molle, necessarie per ottenere la cedevolezza variabile. L’asse del dispositivo `e parallelo a quello del giunto, per sempli-ficare il progetto, e la coppia `e trasmessa tramite tendini d’acciaio, come si vede in figura 15.
Per gli altri due giunti si `e studiata una soluzione nuova, che sfrutta la
(a) (b)
Figura 15: Particolari del dispositivo scelto per ottenere la cedevolezza variabile nel primo giunto: due motori sono connessi ad un VSA II, che a sua volta `e connesso con tendini alla puleggia calettata sul primo giunto.
trasmissione con tendini per posizionare i motori all’interno del primo link, in una posizione che minimizza l’inerzia ripetto all’asse del primo giunto (vedi figura 16). I dispositivi per la cedevolezza variabile sono posizionati lungo i tendini, all’interno del primo link, sfalsati di 90◦l’uno dall’altro. La struttura
scelta e l’andamento della rigidezza che si ottiene sono mostrati in figura17. Per quanto riguarda il progetto degli altri particolari mostriamo i giun-ti di spalla e di gomito in figura 18: quest’ultimo presenta una struttura particolare, progettata in modo tale da permettere al braccio di chiudersi completamente su se stesso.
Figura 16: Particolare della struttura all’interno del primo link, necessaria per l’at-tuazione degli ultimi due link: i motori come si vede sono posizionati con assi paralleli e verticali, e sugli alberi di uscita dei riduttori sono calettate quattro pulegge di rimando, che permettono ai tendini d’acciaio di entrare nei dispositivi per la cedevolezza variabile.
(a) Modello 3D (b) Schema geometrico (c) Rigidezza vs Sfasamento motori
Figura 17: Dispositivo a cedevolezza variabile tendon-based.
(a) Spalla (b) Gomito