UNIVERSIT `A DI PISA SCUOLA DI INGEGNERIA
RILEVAMENTO DI DATI BIOMECCANICI DELL’ARTO SUPERIORE SU MOVIMENTI PIANI TRAMITE SISTEMI INDOSSABILI E REALIZZAZIONE DI UN MODELLO PER L’INFERENZA
DELL’INTERA CINEMATICA
i i “Tesi” — 2014/11/28 — 9:52 — page 1 — #2 i i i i UNIVERSIT `A DI PISA Scuola di Ingegneria
Corso di Laurea in Ingegneria Biomedica
TESI DI LAUREA MAGISTRALE
RILEVAMENTO DI DATI BIOMECCANICI DELL’ARTO SUPERIORE SU MOVIMENTI PIANI TRAMITE SISTEMI INDOSSABILI E REALIZZAZIONE DI UN MODELLO PER
L’INFERENZA DELL’INTERA CINEMATICA
Relatori
Candidato
Ing. Alessandro Tognetti Federica Di Paola
Dr. Federico Lorussi Ing. Nicola Carbonaro
Indice
Abstract 2
1 Introduzione 4
2 Scenario applicativo: il progetto Interaction 8
2.1 Descrizione dell’intero sistema sensorizzato . . . 10
2.1.1 IMU (inertial measurement units) . . . 13
2.1.2 KPF (knitted piezoresistive fabrics) . . . 16
3 Strumentazione e metodi 19 3.1 Anatomia funzionale dell’arto superiore . . . 19
3.2 Descrizione cinematica del corpo umano . . . 27
3.3 Cinematica dell’arto superiore . . . 30
3.3.1 Cinematica diretta . . . 32
3.4 Protocollo di acquisizione . . . 37
INDICE
4.1 Protocollo sperimentale mediante sistemi ottici . . . 47 4.2 Implementazione in Matlab del modello cinematico dell’arto
superiore . . . 53 4.3 Calibrazione cinematica . . . 57 4.4 Protocollo di analisi mediante il sistema indossabile . . . 61
5 Risultati 64
5.1 Validazione del modello cinematico cinematico con sistemi ottici 64 5.2 Rilevamento dei dati biomeccanici con sensori indossabili . . . 69 5.2.1 Rilevamento dei dati sul piano sagittale . . . 70 5.2.2 Rilevamento dei dati sul piano frontale . . . 76
Elenco delle tabelle
3.1 tabella dei parametri D-H . . . 37 4.1 Caratteristiche tecniche del sistem BTS SMAT-DX 100 . . . 48 5.1 tabella dei valori d’interesse dell’errore relativo al movimento 1 . . 66 5.2 tabella dei valori d’interesse dell’errore relativo al movimento 2 . . 67 5.3 tabella dei valori d’interesse dell’errore prima della calibrazione . . 68 5.4 tabella dei valori d’interesse dell’errore dopo la calibrazione . . . . 69 5.5 tabella degli scostamenti tra la traiettoria reale e quella di un
socket-ball in funzione dell’angolo di flessione . . . 75 5.6 tabella degli scostamenti tra la traiettoria reale e quella di una
Elenco delle figure
2.1 werable sensing system INTERACTION . . . 10
2.2 Sistema sensorizzato per il monitoraggio delle attivit´a di vita quotidiana di un paziente post-ictus . . . 11
2.3 (a) Vista anteriore del prototipo sviluppato da INTERACTION per gli arti supe-riori.(b) Vista posteriore del prototipo sviluppato da INTERACTION per gli arti superiori. . . 12
2.4 (a) Particolare del prototipo in cui viene illustrata la taschina all’interno del quale viene posizionato l’IMU sul torace.(b) Particolare del prototipo in cui viene illustrata la taschina all’interno del quale viene posizionato l’IMU sul braccio. . . 13
2.5 Da sinistra verso destra:box per il goniometro, scheda del goniometro,IMUs wireless con batteria attaccato alla scheda del goniometro . . . 13
2.6 principio di funzionamento di ogni unit´a MTx. . . 14
2.7 KPF a singolo strato . . . 17
ELENCO DELLE FIGURE
3.2 Vista anteriore ed anterolaterale del cingolo scapolare . . . 20
3.3 elevazione/depressione. . . 22
3.4 Movimenti della scapola. . . 22
3.5 Movimenti dell’arto superiore nei tre piani dello spazio . . . 24
3.6 Cinematica del ritmo scapolo-omerale. . . 25
3.7 Movimenti dell’avambraccio . . . 26
3.8 Rappresentazione del carry-angle . . . 27
3.9 Movimenti della mano . . . 27
3.10 Corrispondenza generale tra giunti fisiologici e giunti della meccanica classica . . . 29
3.11 (a) Modello meccanico semplificato dell’arto superiore che approssima i segmenti ossei (tratti neri) e le articolazioni (quadrati bianchi) . (b) Modello cinematico dell’arto superiore. . . 32
3.12 Singolarit´a cinematica . . . 33
3.13 Parametri cinematici di Denavit-Hartenberg . . . 35
3.14 Modello cinematico dell’arto superiore . . . 36
3.15 Punti di repere anatomici sulla base dei quali vengono definiti i sistemi di riferimento anatomici . . . 39
3.16 Sistema di riferimento del torace . . . 41
3.17 Sistema di riferimento della scapola . . . 42
3.18 Sistema di riferimento dell’omero . . . 43
ELENCO DELLE FIGURE
4.1 Posizione dei marker sui repere anatomici d’interesse. . . 49
4.2 Protocollo di analisi sviluppato in SMARTAnalyzer . . . 51
4.3 Posizione statica . . . 56
4.4 Rappresentazione di un movimento: abduzione del braccio . . . 56
4.5 (a) Vista anteriore del prototipo con marker posizionati sui repere anatomici.(b) Vista posteriore del prototipo con marker posizionati sui repere anatomici . . . 62
5.1 Modello cinematico dell’arto superiore con i rispettivi s.d.r per ciascuna parte anatomica 65 5.2 Modello cinematico dell’arto superiore sviluppato in Matlab che simula la presa di un oggetto . . . 66
5.3 Modello cinematico dell’arto superiore sviluppato in Matlab che simula l’azione di mangiare . . . 67
5.4 Movimento di flessione sul piano sagittale rilevato con IMU (a destra) e con il sistema ottico (a sinistra) . . . 71
5.5 (a) Movimento di flessione visto su un piano orizzontale rilevato con IMU (a destra) e con il sistema ottico (a sinistra) . . . 72
5.6 Movimento di flessione sul piano verticale rilevato con IMU (a destra) e con il sistema ottico (a sinistra) . . . 73
5.7 (a) Vista laterale della traiettoria dell’end-effector con un socket-ball (b) Vista laterale della traiettoria reale dell’end-effector . . . 74
ELENCO DELLE FIGURE
5.9 Andamento della deformazione rilevata dal KPF e dal BTS durante il movimento di flessione . . . 76
5.10 Movimento di abduzione sul piano frontale rilevato con IMU (in alto) e con il sistema ottico (in basso) . . . 77
5.11 Movimento di abduzione sul piano orizzontale rilevato con IMU (in alto) e con il sistema ottico (in basso) . . . 78
5.12 (a) Vista frontale della traiettoria dell’end-effector con un socket-ball (b) Vista frontale della traiettoria reale dell’end-effector . . . 79
5.13 Rappresentazione di un movimento di abduzione . . . 81
5.14 Andamento della deformazione rilevata dal KPF e dal BTS durante il movimento di abduzione . . . 82
Abstract
This thesis work costitues an EU project, INTERACTION, which aims at developing and validating an unobtrusive and modular system for monito-ring daily life activities, physical interactions with the environment and for training upper and lower extremity motor capabilities stroke subjects. This thesis focused on study and analysis of the upper limb biomechanics, star-ting from the implementation of a mathematical model, represented by 10 Dof a kinematic chain, which takes into account the complex kinematics of the shoulder. In fact, to obtain a reliable description of an accurate kinema-tics, more advanced than the socket-ball model, the proposed one represents the the shoulder with 6 Dofs, relative to the synergistic mechanism between the glenohumeral and scapulothoracic joints. Using the wearable, sensori-zed system developed by INTERACTION, an analysis on the experimetal results gathered in performing plan movement of the end-effector has been done. Information from different types of sensors, (e.g. IMU, KPF strain sensors), integrated into the prototype have provieded biomechanical data,
ELENCO DELLE FIGURE
highly correlated with the specific movements of the shoulder. These data shown that the mesurement of the shoulder kinematics through IMUs and strain sensors, applied to the new model, improves the quality of the position estimation if compared with the currently used socket-ball model. A optical system has been used as a gold standard during all the experimentation to validate the fitting of the obtained results.
Capitolo 1
Introduzione
Le malattie cerebrovascolari rappresentano la terza causa di mortalit´a e la prima causa di invalidit´a nei paesi industrializzati. Di tutte le persone che subiscono un ictus cerebrale, circa un terzo presenta una menomazione permanente, che non dipende soltanto dalla localizzazione e dall’entit´a del danno cerebrale, ma soprattutto da una buona terapia riabilitativa, al fine di recuperare un adeguato controllo delle capacit´a motorie.
La necessit´a di valutare sia il grado di disabilit´a motoria sia l’effetto di diver-se terapie sul paziente, ha portato i ricercatori a sviluppare nuovi dispositivi e algoritmi che possano monitorare accuratamente un movimento durante lo svolgimento di un’attivit´a.
L’analisi del movimento, mediante sistemi di misura che rilevano la cinemati-ca 3D, `e ormai una tecnica consolidata nell’ambito clinico e rappresenta uno
strumento valido nello studio delle patologie neuromuscolari. Pertanto ha assunto un ruolo fondamentale nel processo di valutazione, nel monitoraggio e nelle decisioni clinico-terapeutiche nella medicina riabilitativa, in quanto permette di ottenere una valutazione quantitativa, evitando interpretazioni soggettive da parte dei terapisti.
Il monitoraggio continuo delle funzioni motorie durante lo svolgimento delle attivit´a della vita quotidiana rappresenta, per i terapisti, una guida ottimale nel processo riabilitativo. Per le applicazioni che si svolgono all’esterno di un laboratorio, come per esempio il monitoraggio delle funzioni motorie nell’in-terazione fisica con l’ambiente, vengono generalmente usati sensori applicati su specifiche parti del corpo, al fine di ricavarne i parametri biomeccanici d’interesse. I dati forniti dall’analisi strumentale vengono utilizzati per va-lutare l’effetto dei disturbi neuromuscolari sugli arti superiore e inferiori ed eventualmente valutare l’effetto della terapia sul paziente.
Il lavoro di tesi `e inserito all’interno del progetto di ricerca finanziato dalla Comunit´a Europea, INTERACTION, che mira a sviluppare e validare un sistema indossabile, modulare (ovvero sviluppato in parti separate) e non invasivo per il monitoraggio di movimenti eseguiti durante le attivit´a di vita quotidiana e di individuare le interazioni fisiche con l’ambiente circostante. Questo sistema viene utilizzato nell’ambito del processo riabilitativo delle funzioni motorie, riguardanti gli arti inferiori e superiori.
biomeccanica dell’arto superiore, partendo dallo sviluppo e dall’implemen-tazione in Matlab di un modello matematico, rappresentato da una cate-na cinematica aperta costituita da quattro link (cingolo scapolare, braccio, avambraccio e mano) e 10 GDL, la cui cinematica ´e descritta secondo la convenzione di Denavit-Hartenberg. Gli ampi movimenti che caratterizzano l’arto superiore sono dovuti all’elevata complessit´a della spalla. Quest’ultima presenta il pi´u elevato grado di mobilit´a del corpo umano, conferita principal-mente dalla cooperazione anatomofunzionale dell’articolazione gleno-omerale e scapolo-toracica, durante l’esecuzione dei movimenti dell’arto superiore. Nella maggior parte dei modelli proposti in letteratura, la spalla `e modellata con una socket-ball (ovvero un giunto sferico 3 GDL con superfici conformi), semplificando il suo comportamento biomeccanico alla sola cinematica del-l’articolazione gleno-omerale, resa per´o capace di coprire uno spazio di lavoro paragonabile a quello dell’intera spalla. Al fine di ottenere una descrizione pi´u fedele della reale cinematica, nel seguente lavoro di ricerca viene proposto un modello della spalla a sei GDL, che rappresentano la cooperazione tra le due articolazioni.
Nella prima fase del lavoro, viene condotto uno studio sulla cinematica del-l’arto superiore grazie al sistema ottico SMART DX-100, che permette di ricavare in maniera non invasiva, informazioni numeriche che permettono la ricostruzione tridimensionale del corpo, durante l’esecuzione di un task mo-torio. A riguardo, viene implementato un protocollo per l’analisi cinematica
dell’arto superiore, descrivendone le caratteristiche e le metodologie utilizzate per la sua elaborazione, tramite il software Smart Analyzer. Per migliorare i risultati ottenuti, riducendo gli errori sull’end-effector, `e stato sviluppato un algoritmo di calibrazione cinematica.
La seconda fase dell’analisi sperimentale `e focalizzata, in particolar modo, sulla cinematica della spalla. L’analisi viene condotta utilizzando il siste-ma indossabile sensorizzato sviluppato in INTERACTION, appositamente realizzato per gli arti superiori. Quest’ultimo, grazie alla combinazione di informazioni fornite da diverse tipologie di sensori, permette di ricavare dati biomeccanici altamente correlati con specifici movimenti della spalla. Du-rante questa fase di ricerca, vengono effettuate delle acquisizioni di semplici movimenti dell’arto superiore eseguiti sul piano frontale e sagittale, indos-sando il prototipo appositamente realizzato. L’esecuzione di queste prove avviene simultaneamente con il sistema SMART-DX 100, per analizzare la cinematica dell’arto superiore, in termini di traiettoria dell’end-effector. Con i dati ricavati dai differenti sistemi di misura, si vuole dimostrare che lo scostamento della traiettoria reale dell’end-effector (valutata con il sistema ottico) da quella ottenuta approssimando la cinematica della spalla con un socket-ball, `e correlato al grado di deformazione dello strain.
Capitolo 2
Scenario applicativo: il
progetto Interaction
INTERACTION `e un progetto finanziato dall Comunit´a Europea che mi-ra a sviluppare e validare un sistema indossabile, modulare e non invasivo, con il fine di monitorare i movimenti eseguiti durante lo svolgimento delle attivit´a di vita quotidiana e di individuare e analizzare le interazioni fisiche con l’ambiente[1]. Questo sistema viene utilizzato nell’ambito del processo riabilitativo delle funzioni motorie, riguardanti gli arti superiori e inferiore di un paziente che ha subito un ictus. Nello specifico, INTERACTION mira a sviluppare un sistema che prevede un set di sensori wireless completamente integrati in una piattaforma tessile modulare (maglietta, pantaloni, guanti e scarpe), che permette al medico un telemonitoraggio, consentendogli di
valu-tare da un lato le condizioni fisiche del paziente e dall’altro fornire eventuali modifiche sul processo riabilitativo.
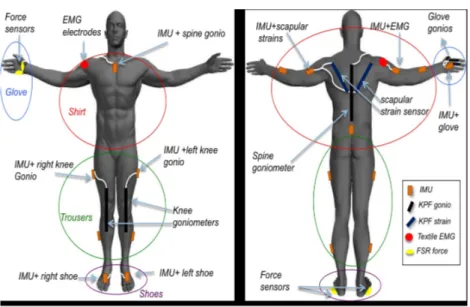
In letteratura, sono stati condotti diversi studi dedicati allo sviluppo di di-spositivi indossabili, presentando l’inconveniente di utilizzare sensori aventi un peso e un ingombro eccesivo [16] [18]. A differenza di questi prototipi, INTERACTION sviluppa un sistema sfruttando la fusione di sensori inte-grati su indumenti per lo sviluppo di un sistema indossabile, efficace e non invasivo. Infatti, durante la fase di progettazione, l’attenzione `e stata foca-lizzata nel ridurre sia la complessit´a del sistema (rendendolo pi´u confortevole all’utente) sia il tempo impiegato per indossarlo ed effettuare la calibrazione. Il prototipo `e costituito da una maglia, da pantaloni, guanti e scarpe come illustrato in fig.2.1, in cui sono stati integrati differenti tipologie di sensori, mediante i quali `e possibile monitorare il movimento umano (arti superiori ed inferiori, includendo anche mani, piedi e centro di massa) e rilevare le intera-zioni fisiche del paziente con l’ambiente circostante. Nello specifico, elettrodi tessili rilevano l’attivit´a muscolare (EMG); Force Sensitive Resistors (FSR) rilevano la forza che il paziente scambia quando interagisce con l’ambiente che lo circonda, sia in corrispondenza delle estremit´a superiori che inferiori (guanti e scarpe sensorizzate); Knitted Piezoresistive Fabric sensor KPF che, in configurazione a singolo strato (sensore di strain) rilevano la deformazio-ne dovuta ad un movimento articolare e in configuraziodeformazio-ne a doppio strato (goniometro), rilevano l’angolo formato da due segmenti corporei
adiacen-2.1 Descrizione dell’intero sistema sensorizzato
Figura 2.1: werable sensing system INTERACTION
ti; infine Inertial Measurement Units, MTw by XSENS [2] (IMU) rilevano l’orientamento degli arti superiori ed inferiori fig 2.2.
2.1
Descrizione dell’intero sistema
sensoriz-zato
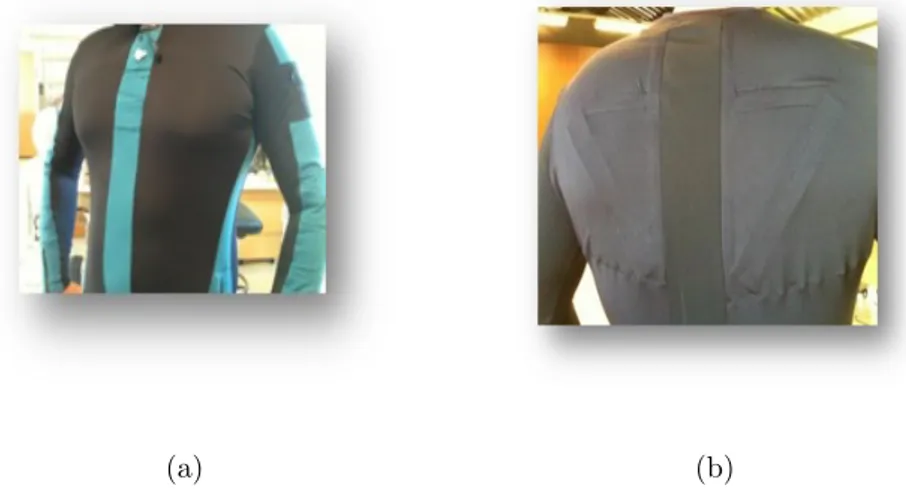
Volgendo l’attenzione nei riguardi del prototipo sviluppato per gli arti superiori, il sistema modulare mostrato in fig 2.3(a) comprende la maglietta, realizzata in tessuto elastico, KPF, in configurazione di singolo strato e dop-pio strato per rilevare rispettivamente i movimenti della scapola e i movimenti del tronco (fig.2.3(b)), interconnessioni, connettori e alcune tasche all’interno delle quali vengono posizionati IMU, come mostrato in fig.2.4(a) e fig.2.4(b).
2.1 Descrizione dell’intero sistema sensorizzato
Figura 2.2: Sistema sensorizzato per il monitoraggio delle attivit´a di vita quotidiana di un paziente post-ictus
Al fine di fornire un alto livello d’integrazione e miniaturizzazione, l’elettro-nica dedicata all’acquisizione del sensore KPF `e stata progettata e realizzata per essere integrata nella scheda dei sensori inerziali. Per la specifica applica-zione `e stato progettato un unico box, leggermente pi´u grande dell’originale, contenente due schede elettroniche (fig. 2.5), sfruttando cos´ı un unico canale digitale, con l’obiettivo di ridurre l’ingombro e migliorare la vestibilit´a. Il prototipo sviluppato in INTERACTION per gli arti superiori `e stato rea-lizzato per monitorare nello specifico i ) i movimenti di flesso-estensione del gomito, ii ) la posizione della mano rispetto al gomito, spalla e sterno e iii ) i movimenti del tronco. La flesso-estensione del gomito e la posizione della mano, rispetto al gomito e alla spalla, vengono valutati a partire dal loro
2.1 Descrizione dell’intero sistema sensorizzato
(a) (b)
Figura 2.3: (a) Vista anteriore del prototipo sviluppato da INTERACTION per gli arti superiori.(b) Vista posteriore del prototipo sviluppato da INTERACTION per gli arti superiori.
orientamento, mediante i sensori inerziali posizionati sui rispettivi segmenti corporei, come indicato in [13]. I movimenti di flessione del tronco vengono rilevati tramite la combinazione dei dati relativi al goniometro KPF, posi-zionato lungo il rachide e i dati del sensore inerziale posiposi-zionato nella zona sacrale.
In particolare, il lavoro di ricerca si focalizza sullo studio e sull’analisi dei com-plessi movimenti della spalla. Quest’ultima presenta il pi´u elevato grado di mobilit´a del corpo umano, conferita principalmente dalla cooperazione ana-tomofunzionale dell’articolazione gleno-omerale e scapolo-toracica, durante l’esecuzione dei movimenti dell’arto superiore. Lo studio della sua cinema-tica cos´ı complessa, per la presenza di un numero elevato di GDL, viene condotto attraverso un’analisi sperimentale utilizzando il prototipo appena descritto. Per ottenere informazioni migliori, si combinano i dati forniti da
2.1 Descrizione dell’intero sistema sensorizzato
(a) (b)
Figura 2.4: (a) Particolare del prototipo in cui viene illustrata la taschina all’interno del quale viene posizionato l’IMU sul torace.(b) Particolare del prototipo in cui viene illustrata la taschina all’interno del quale viene posizionato l’IMU sul braccio.
Figura 2.5: Da sinistra verso destra:box per il goniometro, scheda del goniometro,IMUs wireless con batteria attaccato alla scheda del goniometro
differenti tipologie di sensori, quali il sensore di strain KPF e i sensori iner-ziali (posizionato come illustrato in fig.2.2). Questi dati, una volta elaborati, vengono correlati ad alcuni specifici movimenti dell’arto superiore.
2.1.1
IMU (inertial measurement units)
L’uso dei sensori inerziali `e diventato una pratica comune nell’ambito dell’analisi del movimento [9], essendo strumenti di misura relativamente
2.1 Descrizione dell’intero sistema sensorizzato
economici, pratici e di dimensioni e peso ridotti. Ogni IMU viene posiziona-ta su differenti segmenti corporei d’interesse, come descritto da Roetenberg [14], al fine di valutare i relativi dati biomeccanici. Il grande vantaggio dei sensori inerziali `e quello di poter effettuare delle misure non solo all’interno di un laboratorio, ma anche in ambiente domestico per un periodo di tempo prolungato.
Ogni IMU `e costituita da un accelerometro, un giroscopio e un magnetome-tro 3D, che permettono di stimare l’orientamento di ogni IMU rispetto ad un sistema di riferimento globale. Il software di gestione, elabora i dati di ogni sensore di cui l’IMU `e costituito e fornisce in uscita le matrici di rota-zione che esprimono l’orientamento del dispositivo rispetto ad un sistema di riferimento globale.
Questa informazione `e ottenuta combinando le informazioni di questi senso-ri, mediante un algoritmo basato sul filtro di Kalman, elaborato dal software stesso. La figura 2.6 illustra il principio di funzionamento di ogni unit´a MTx. Per fornire informazioni clinicamente significative, i protocolli dell’analisi del
2.1 Descrizione dell’intero sistema sensorizzato
movimento, basati su sensori inerziali, devono essere validati utilizzando un sistema ottico. Quest’ultimo, infatti, `e considerato un gold standard, essendo il sistema di misura pi´u accurato nell’ambito dell’analisi del movimento. In generale, il sistema di motion capture, basato su sistemi ottici, `e un stru-mento di misura convenzionale e versatile, adottato per la ricostruzione della cinematica dei segmenti corporei. Si tratta di un sistema che si basa sulla misura della luce emessa da marker, che possono essere rispettivamente attivi e passivi. Il movimento `e rilevato posizionando alcuni marker su determinati repere anatomici, in base al protocollo di acquisizione che dipende dall’appli-cazione specifica. Inoltre, viene utilizzato un set minimo di due telecamere per registrare, la posizione dei marker nello spazio e mediante differenti al-goritmi viene valutata la posizione e l’orientamento dei segmenti corporei di analisi.
Nonostante il sistema ottico sia versatile e molto accurato presenta alcuni punti critici:
le acquisizioni sono limitate nello spazio di lavoro calibrato, precluden-do la possibilit´a di monitorare i movimenti del corpo umano nel lungo termine in ambienti esterni al laboratorio di analisi;
l’occlusione dei marker durante l’esecuzione del movimento, inficia sulla corretta acquisizione dei dati;
2.1 Descrizione dell’intero sistema sensorizzato
Pertanto, nonostante siano meno accurati, `e preferibile utilizzare sensori iner-ziali per l’analisi del movimento durante il processo riabilitativo; infatti `e possibile eseguire un’analisi cinematica di un soggetto, durante le attivit´a di vita quotidiana, anche in ambiente domestico, utilizzando strumenti di mi-sura portatili, economici e di dimensioni e peso ridotti.
2.1.2
KPF (knitted piezoresistive fabrics)
Recentemente `e stato sviluppato un nuovo sensore di strain indossabile, che nel prototipo realizzato in INTERACTION, viene utilizzato per monito-rare e analizzare i complessi movimenti dell’articolazione della spalla [7]. Si tratta di un sensore tessile realizzato con un sottile strato di materiale piezo-resistivo, il cui spessore `e trascurabile rispetto alla sua lunghezza e larghezza, applicato su uno strato di tessuto. Il principio di funzionamento `e ispirato al comportamento dei meccanorecettori sensibili allo strain, situati sulla pelle della mano, di cui il Sistema Nervoso Centrale (SNC) si serve per codificare i movimenti delle articolazioni. Pertanto, i sensori vengono applicati su un substrato, aderente al corpo come se fosse una seconda pelle, risentendo dei movimenti articolari. Quest’ultimi sono responsabili di una deformazione del sensore che `e correlata ad una variazione della resistenza elettrica [10]. Le caratteristiche del KPF sono la flessibilit´a e il mantenimento delle
pro-2.1 Descrizione dell’intero sistema sensorizzato
Figura 2.7: KPF a singolo strato
priet´a meccaniche del tessuto sul quale `e applicato. Il modello elettrico del sensore si basa sulle seguenti assunzioni: i ) lo strato sensibile `e caratterizzato da deformazioni isovolumentriche, ii ) la resistivit´a del materiale ρ `e costante e iii ) il substrato tessile non `e estensibile se piegato (fig:2.7). Sotto queste ipotesi, `e stato dimostrato che la resistenza elettrica RSL del campione di
lunghezza l `e funzione della curvatura totale attraverso la relazione (2.1):
RS L= l ρ dh− ρ d∆α+O(sups∈(0,l)k(s) 2 ) = l2 ρ V0 − ρ d∆α + O(sups∈(0,l)k(s) 2 )(2.1)
in cui V0 `e il volume del campione, d il suo spessore, ∆α `e l’angolo
com-preso tra i piani tangenti alle estremit´a del sensore, h0 `e lo spessore iniziale
del campione, s `e la lunghezza d’arco del lato del sensore parametrizzato e O(sup k(s)2) `e la funzione di secondo ordine infinitesimale che tende a zero se
la curvatura k(s)→0. Per cui, trascurando O(sup k(s)2), dall’(2.1) si ricava
la seguente espressione (2.2): ∆α ∼= dl 2 V0 − d ρRS L (2.2)
2.1 Descrizione dell’intero sistema sensorizzato
In precedenza sono state condotte prove ripetute di allungamento/accorcia-mento per verificare la linearit´a della caratteristica elettromeccanica del sen-sore di strain. Dai risultati ottenuti emerge un comportamento quasi lineare e dalla pendenza della caratteristica `e stata valutata la sensitivit´a Sd che
risulta essere pari a (2.3):
Sd= 11950Ω/mm (2.3)
Nel caso di studio, la deformazione del tessuto causata dai movimenti del-la scapodel-la sono responsabili di una variazione deldel-la resistenza elettrica del sensore. Infatti, l’interpretazione dei dati `e basata sulla correlazione tra la variazione della resistenza elettrica e la variazioni della configurazione ci-nematica [5] [4]. Questa variazione `e associata ai movimenti di elevazione depressione della scapola, abduzione adduzione dell’omero e rotazione della scapola; questi movimenti verranno descritti nel capitolo 3.
Nella fase sperimentale, si utilizzer´a il prototipo appena descritto per studia-re la cinematica della spalla mediante movimenti eseguiti sul piano frontale e sagittale.
Capitolo 3
Strumentazione e metodi
3.1
Anatomia funzionale dell’arto superiore
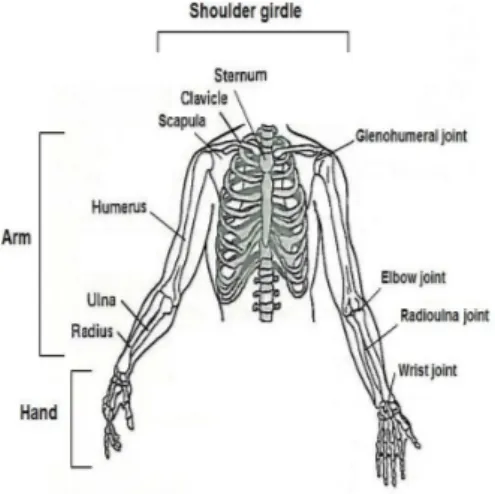
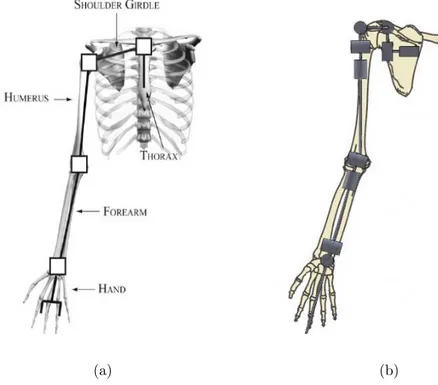
L’ arto superiore `e costituito da quattro distretti corporei articolati tra loro: cingolo scapolare, braccio, avambraccio e mano (fig.3.1). Il cingolo
3.1 Anatomia funzionale dell’arto superiore
scapolare (fig.3.2) connette l’arto superiore al tronco ed `e costituito da cla-vicola, scapola e, secondo alcune letterature, dall’ omero. La sua funzione principale `e quella di conferire maggiore mobilit´a al braccio. La clavicola `e la
Figura 3.2: Vista anteriore ed anterolaterale del cingolo scapolare
parte “moderatrice” che controlla la libera azione della scapola. Attraverso l’articolazione sterno-costo-clavicolare, essa si collega con il torace, rappre-sentando l’unica connessione dell’arto superiore con l’asse scheletrico. Tale precaria giunzione viene enormemente rinforzata dalla robusta muscolatura della spalla. Inoltre, la sua forma a “manovella” le d´a un ruolo di barra di torsione, grazie alla quale la scapola pu`o ruotare fino a 60°.
La scapola `e la struttura che supporta l’arto superiore, a cui `e connessa at-traverso l’articolazione gleno-omerale. Oltre l’omero, la scapola si connette con la clavicola mediante l’articolazione acromion-clavicolare e scivola sulla gabbia costale sottostante, grazie all’articolazione scapolo-toracica. Quest’ul-tima `e una sinsarcosi delimitata dalla convessit´a della gabbia toracica e dalla
3.1 Anatomia funzionale dell’arto superiore
concavit´a della faccia anteriore della scapola. A differenza delle altre, la scapolo-toracica `e una “falsa” articolazione in senso anatomico, ma “vera” dal punto di vista funzionale, essendo la vera unione tra cingolo scapolare e tronco. Ogni movimento della scapola si verifica simultaneamente a livello dell’articolazione acromion-clavicolare e della scapolo-toracica, infatti essa pu´o ruotare attorno all’ asse antero-posteriore in corrispondenza della prima articolazione e traslare in due direzioni a livello della seconda. La combina-zione del movimento traslatorio con quello rotazionale rende la descricombina-zione del movimento tridimensionale della scapola tutt’altro che semplice.
I movimenti del cingolo scapolare (fig. 3.3 e fig. 3.4)determinano lo sposta-mento della spalla rispetto al torace e vengono generalmente descritti come movimenti propri della scapola. Questi ultimi possono essere classificati come segue:
Elevazione/depressione: `e la traslazione sul piano costale lungo l’asse cranio-caudale. Nonostante sia accompagnato da una rotazione della scapola, questo pu´o essere approssimato con un movimento traslatorio non planare; in particolare l’elevazione avviene in direzione craniale e la depressione in direzione opposta;
Protrazione/retrazione o rotazione interna/esterna: `e lo spin sul piano costale lungo l’asse medio-laterale. Questo movimento `e accompagnato da una rotazione della scapola attorno all’asse verticale, ma viene
ap-3.1 Anatomia funzionale dell’arto superiore
Figura 3.3: elevazione/depressione.
prossimato con un movimento traslatorio non planare; in particolare, la protrazione avviene in direzione laterale, mentre il movimento opposto `
e la retrazione;
Rotazione verso l’alto verso il basso: `e la rotazione attorno all’asse antero-posteriore;
Tipping o Tilting: `e la rotazione attorno all’asse frontale ed essenzial-mente `e una rotazione interna della scapola.
Figura 3.4: Movimenti della scapola.
L’omero si connette alla scapola, mediante l’articolazione gleno-omerale che generalmente `e considerata la vera articolazione della spalla. Le sue superfici articolari sono reciprocamente incongrue, essendo la testa omerale molto pi´u
3.1 Anatomia funzionale dell’arto superiore
estesa ed arrotondata della fossa glenoidea. L’incompleto adattamento delle superfici `e la condizione meccanica che maggiormente contribuisce a rendere l’articolazione gleno-omerale la pi´u mobile delle enartrosi. Infatti, questa ar-ticolazione `e dotata della massima libert´a di movimento ed `e intrinsecamente molto instabile, ragione per cui i movimenti sono sempre il risultato di azioni muscolari altamente coordinate, sincronizzate ed armoniche. In confronto all’articolazione dell’anca, in cui la cavit´a acetabolare circonda buona parte della coxa, la cavit´a glenoidea, essendo piccola e piatta, riesce ad inglobare una porzione molto ristretta della testa omerale. Ne consegue che la mobilit´a di questa articolazione deve basarsi anche su una cinetica di scivolamento, a differenza di quella coxo-femorale, che invece utilizza una meccanica esclusi-vamente del tipo “cuscinetto a sfera”.
Gli ampi movimenti dell’arto superiore rispetto al tronco sono resi possibili dalla stretta collaborazione anatomofunzionale che si stabilisce a livello della spalla tra scapola, clavicola ed estremit´a prossimale dell’omero. Infatti, la funzione principale dei complessi movimenti della scapola `e quella di orienta-re l’arto superioorienta-re in rapporto ai torienta-re piani dello spazio, una volta determinata la sua posizione.
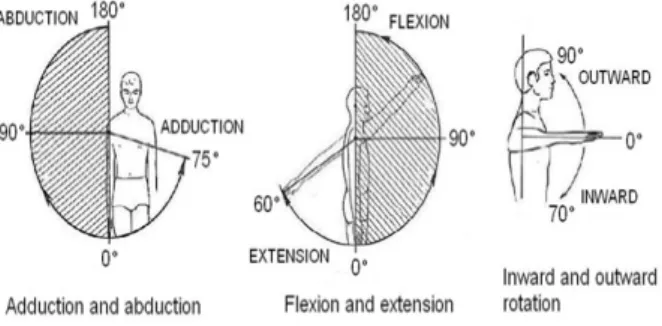
Partendo da una posizione di riferimento (arto superiore lungo il tronco ) i movimenti vengono cos´ı classificati:
3.1 Anatomia funzionale dell’arto superiore
sagittale, attorno ad un asse trasversale, rispettivamente in direzione anteriore e posteriore;
Abduzione-adduzione: sono i movimenti che si eseguono lungo il pia-no frontale, attorpia-no ad un asse sagittale, rispettivamente in direzione laterale e mediale;
rotazione interna-esterna: `e la rotazione attorno all’asse longitudinale dell’omero, rispettivamente verso l’interno e l’esterno.
Figura 3.5: Movimenti dell’arto superiore nei tre piani dello spazio
Questi movimenti, illustrati in fig. 3.5, si realizzano mediante la parteci-pazione simultanea delle varie componenti articolari del cingolo scapolare. Nello specifico, questo meccanismo, che prende il nome di “ritmo scapolo-omerale”, evidenzia la relazione cinematica tra il movimento di abduzione gleno-omerale e rotazione della scapolo-toracica. Generalmente per i primi 30°, il movimento `e generato principalmente dall’articolazione gleno-omerale e la scapola ha la funzione di stabilizzare l’arto superiore. Nella fase
suc-3.1 Anatomia funzionale dell’arto superiore
cessiva del movimento, la scapolotoracica e la gleno-omerale si muovono si-multaneamente in un rapporto 1:2, quindi ogni 2°della gelono-omerale equi-valgono ad 1°della scapolo-toracica. Senza questa sinergia, alcuni movimenti dell’omero sarebbero limitati se non impossibili, in quanto la grande tube-rosit´a verrebbe precocemente a contatto con il legamento cercine-glenoideo e l’escursione abduttoria ne risulterebbe interrotta. La cinematica del ritmo scapolo-omerale `e illustrata in fig. 3.6. L’estremit´a distale dell’omero si
arti-Figura 3.6: Cinematica del ritmo scapolo-omerale
cola con l’avambraccio, costituito da ulna e radio, attraverso l’articolazione del gomito. Si tratta di un giunto sinoviale che presenta una certa com-plessit´a, in quanto nell’unica cavit´a articolare sono incluse tre articolazioni: tra omero e ulna, tra omero e radio, tra radio e ulna. Queste articolazione consentono i seguenti movimenti dell’avambraccio:
Flessione ed estensione lungo il piano sagittale; Pronazione e supinazione attorno al proprio asse.
3.1 Anatomia funzionale dell’arto superiore
Questi due movimenti, rappresentati in fig.3.7, sono indipendenti a partire da qualsiasi posizione. A causa della forma delle superfici articolari `e
pre-Figura 3.7: Movimenti dell’avambraccio
sente una deviazione tra l’asse longitudinale dell’omero e dell’avambraccio, che prende il nome di “carry-angle” e varia dai 10°ai 15°per gli uomini e dai 20°ai 25°per le donne. Questa deviazione, illustrata in fig.3.8, fa si che l’asse di rotazione della flesso-estensione, che passa per gli epicondili, non sia perpendicolare agli assi longitudinali del braccio e avambraccio. La ma-no rappresenta l’estremit´a dell’arto superiore, al quale si connette mediante l’articolazione del polso. Considerando come posizione di riferimento quella del braccio esteso nel piano frontale con il palmo della mano rivolto indietro, si classificano i seguenti movimenti:
Flessione ed estensione lungo il piano sagittale; Abduzione e adduzione lungo il piano frontale.
3.2 Descrizione cinematica del corpo umano
Figura 3.8: Rappresentazione del carry-angle
Figura 3.9: Movimenti della mano
3.2
Descrizione cinematica del corpo umano
Lo studio della biomeccanica del movimento umano richiede una rappre-sentazione fedele della cinematica del sistema scheletrico. I modelli mate-matici del corpo umano o di parti di esso sono strumenti indispensabili per lo studio della cinematica e dinamica del movimento umano. Spesso, per´o occorre scegliere tra complessit´a e accuratezza del modello.
3.2 Descrizione cinematica del corpo umano
Nel 1950 W. Demspter introdusse la nozione di segmenti corporei definiti come “segmenti di lunghezza costante che attraversano l’asse principale”. Questa rappresentazione semplificata fa si che gli arti siano modellati come catene cinematiche di corpi rigidi, ciascuno dei quali possiede due articola-zioni. Con questa semplificazione vengono completamente trascurati i tessuti molli circostanti.
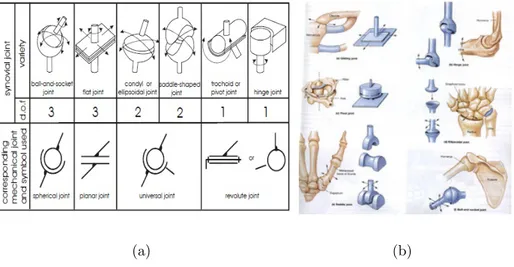
Per una corretta modellazione della catena cinematica `e importante dare un’interpretazione meccanica alle articolazioni fisiologiche. Quest’ultime so-no generalmente classificate, in base alla forma geometrica della superficie articolare, nelle seguenti categorie:
Socket-ball: articolazioni con superficie sferica che danno tre possibi-lit´a di movimento;
Flat joint:articolazioni con superficie piatta o poco curva da essere considerata idealmente piatta, e permettono due traslazioni su un piano e una rotazione attorno all’asse perpendicolare al piano;
Condyl or Ellipsoidal joint:articolazioni le cui superfici sono ellis-soidali e consentono solo i movimenti di flesso-estensione e abduzione-adduzione;
Saddle-shaped joint:articolazioni le cui superfici sono rispettivamen-te concava e convessa che permettono i movimenti di flesso-esrispettivamen-tensione e abduzione-adduzione;
3.2 Descrizione cinematica del corpo umano
Hinge joint:articolazioni le cui superfici sono modellate tra loro in modo tale da consentire il movimento solo su un piano;
Trochoid or pivot joint:articolazione di forma cilindrica disposte in modo tale da generare una rotazione attorno ad un pivot.
Generalmente vi `e una corrispondenza tra i giunti fisiologici e i giunti della meccanica classica come mostrato in figura 3.10(a) e 3.10(b). Tuttavia, la
(a) (b)
Figura 3.10: Corrispondenza generale tra giunti fisiologici e giunti della meccanica classica
complessa geometria delle superfici articolari e l’importante ruolo dei lega-menti, limita questa corrispondenza nella funzionalit´a dell’articolazione fisio-logica [3]. Un ulteriore semplificazione che si fa nella modellazione dei giun-ti `e considerare l’esistenza di centri di rotazione, nonostante nessun giunto soddisfa questo criterio.1
1Vengono riportati tutte le tipologie di giunto per completezza, ma nel modello vengono
3.3 Cinematica dell’arto superiore
3.3
Cinematica dell’arto superiore
Il modello matematico dell’arto superiore `e rappresentato da una cate-na cinematica aperta, costituita da quattro links (cingolo scapolare, braccio, avambraccio e mano) e 10 GDL. Gli ampi movimenti che caratterizzano l’ar-to superiore sono dovuti alla sua grande complessit´a e all’ elevato numero di GDL, solitamente studiati separatamente. Nel modello vengono identificati i segmenti ossei e le articolazioni, specificando il numero di gradi libert´a di ogni articolazione.
Il cingolo scapolare viene definito come il segmento che connette il punto medio tra l’incisura giugulare IJ e la settima vertebra cervicale C7, con il centro di rotazione gleno-omerale 3.11(a). Considerando che i suoi movi-menti vengono generalmente descritti come movimovi-menti propri della scapola, nel modello non `e stata inserita la clavicola. Un’ulteriore semplificazione `
e relativa alla scelta di trascurare i movimenti di tilting e di semplificare il movimento di protrazione/retrazione ed elevazione/depressione con una sem-plice traslazione planare. Inoltre, `e considerato l’equivalente meccanico di un flat joint e pertanto `e rappresentato con tre GDL. Il movimento equivalente alla rotazione verso l’alto `e schematizzato con una coppia rotoidale, mentre i movimenti di elevazione/depressione e protrazione/retrazione sono schema-tizzati con due coppie prismatiche.
rappre-3.3 Cinematica dell’arto superiore
sentato da tre GDL, equivalenti ai movimenti di abduzione-adduzione, flesso-estensione e rotazione interna-esterna dell’omero. Essendo l’equivalente di un giunto sferico, quest’articolazione `e schematizzata con tre coppie rotoidali. L’articolazione del gomito equivale ad un hinge-joint ed `e rappresentato da un GDL, relativo al movimento di flesso-estensione dell’avambraccio. Que-st’ultimo, inoltre pu´o compiere anche il movimento di prono-supinazione, che `e stato schematizzato, al livello del gomito, con un ulteriore giunto ro-toidale. Infine, l’articolazione del polso corrisponde ad un ellipsoidal joint rappresentato da due GDL, equivalenti ai movimenti di flesso-estensione e abduzione-adduzione della mano. Nello specifico esso `e schematizzato con due coppie rotoidali.
In fig.3.11(b) `e presentato il modello cinematico dell’arto superiore, in cui la terna base `e fissata nel punto medio tra IJ e la C7 e la mano `e l’end-effector. Uno dei limiti di questo modello cinematico `e la presenza di una singolarit´a a livello del giunto gleno-omerale. Infatti, il meccanismo del giunto sferico rappresentato e studiato con tre giunti separati `e la causa della singolarit´a cinematica. Nel caso in esame, essa si verifica in seguito ad un’abduzione di 90°dell’omero seguita da una flessione orizzonate sempre di 90°; in que-sta configurazione si ha la perdita di un GDL, come mostrato in fig 3.12. Inoltre, il modello proposto `e ridondante, in quanto presenta pi´u GDL ri-spetto a quelli necessari alla caratterizzazione di un task. Ci´o significa che un determinato compito pu´o essere eseguito in diversi modi dai singoli giunti
3.3 Cinematica dell’arto superiore
(a) (b)
Figura 3.11: (a) Modello meccanico semplificato dell’arto superiore che approssima i segmenti ossei (tratti neri) e le articolazioni (quadrati bianchi) . (b) Modello cinematico dell’arto superiore.
e questo pu´o essere sfruttato per evitare la configurazione di singolarit´a.
3.3.1
Cinematica diretta
Mediante l’equazione cinematica diretta (3.1) si esprime la posizione e l’orientamento dell’end-effector Xe in funzione dei valori assunti dalle varia-bili di giunto q, rispetto alla terna base.
3.3 Cinematica dell’arto superiore
Figura 3.12: Singolarit´a cinematica
La convenzione Denavit-Hartenberg `e un metodo generale e sistematico per definire le trasformazioni geometriche che legano la terna di riferimento, re-lativa a ciascun giunto, a quella successiva.
La procedura consiste in due fasi, nella prima vengono individuate le terne solidali a ciascun link e nella seconda vengono determinate le trasformazioni di coordinate che le legano. Trattandosi di un metodo sistematico, esistono delle precise regole nella definizione delle terne ai singoli links.
Partendo dalla base per giungere all’end-effector, si numerano i giunti in or-dine crescente. Assumendo che l’asse i sia l’asse del giunto che connette il link i-1 al link i, per definire la terna i si procede nel seguente modo:
si sceglie l’asse zi giacente lungo l’asse del giunto i+1;
si individua Oi all’intersezione dell’asse zi con la normale comune agli
assi zi-1 e zi, e con O0i si indica l’intersezione della normale comune con
3.3 Cinematica dell’arto superiore
si sceglie l’asse xi diretto lungo la normale comune agli assi zi e zi con
verso positivo dal giunto i al giunto i+1;
si sceglie l’asse yi in modo da completare una terna levogira.
Una volta scelte le terne solidali ai bracci, la posizione e l’orientamento del-la terna i rispetto aldel-la terna i − 1 risultano completamente specificati dai seguenti parametri:
ai `e la distanza tra zi-1e zi lungo l’asse xi;
di `e la distanza tra xi-1 e xi misurata lungo la direzione zi-1;
αi`e l’angolo intorno all’asse xi tra l’asse zi-1 e l’asse zi valutato positivo
in senso antiorario;
θi`e l’angolo intorno all’asse zi tra l’asse xi-1 e l’asse xi valutato positivo
in senso antiorario.
Le operazioni sopra citate sono illustrare in fig.3.13.
I parametri aie αisono sempre costanti e dipendono soltanto dalla geometria
di connessione dei giunti consecutivi; degli altri due, solamente uno `e variabile in dipendenza del tipo di giunto utilizzato per connettere il braccio i − 1 al braccio i. In particolare:
Se il giunto i `e rotoidale la variabile `e θi;
3.3 Cinematica dell’arto superiore
Figura 3.13: Parametri cinematici di Denavit-Hartenberg
A questo punto, sulla base di questi quattro parametri, si `e in grado di esprimere la trasformazione di coordinate che lega la terna i alla terna i-1 (3.2). Tii−1= Tz, θi∗ Ttr, [0, 0, di ] ∗ Ttr, [ai, 0, 0 ] ∗ Tx, αi = cos θ − sin θ 0 0 sin θ cos θ 0 0 0 0 1 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 1 d 0 0 0 1 1 0 0 a 0 0 0 0 0 0 1 0 0 0 0 1 1 0 0 0 0 cos α − sin α 0 0 sin α cos α 0 0 0 0 1 =
cos θ − cos α sin θ sin α sin θ a cos θ sin θ cos α cos θ − sin α cos θ a sin θ
0 0 cos θ d 0 0 0 1 (3.2)
Moltiplicando le singole trasformazioni omogenee si ottiene la posizione e orientamento dell’end-effector rispetto la terna base [17].
3.3 Cinematica dell’arto superiore
In fig.3.14 `e riportato il modello dell’arto superiore, in cui `e stato eviden-ziato il posizionamento dei sistemi di riferimento per ogni giunto, seguendo la convenzione D-H. In particolare, l’asse in rosso `e l’asse z, corrispondente all’asse di giunto e quello in nero `e l’asse x. L’asse y `e orientato in modo da ottenere una terna levogira, ma non `e stato inserito in figura, al fine di rendere pi´u chiara questa configurazione. Sono stati ricavati e riportati in
Figura 3.14: Modello cinematico dell’arto superiore
tab 3.1 i parametri D-H per ogni giunto.
Le variabili di giunto, evidenziate in neretto, vengono stimate mediante il sistema di motion-capture SMART DX-100, basato su sensori optoelettro-nici. L’analisi del movimento fornisce informazioni quantitative riguardo la biomeccanica del sistema muscolo-scheletrico durante l’esecuzione di un task
3.4 Protocollo di acquisizione
Tabella 3.1: tabella dei parametri D-H
Link a α d θ 1 0 90 d1 −90 2 0 −90 d2+ ds −90 3 as 0° dz θ3 4 0 −90 0 θ4+90 5 0 90 0 θ5-90 6 0 −90 -αca -dua θ6 7 0 90 0 θ7 8 0 −90 -dfa θ8 9 0 90 0 θ9+90 10 0 0 0 θ10 motorio.
3.4
Protocollo di acquisizione
L’analisi del movimento umano si basa su un modello matematico del sistema muscolo-scheletrico, al fine di fornire una descrizione quantitativa delle funzioni del sistema locomotore. In particolare, basandosi sulla stereo-fotogrammetria, l’analisi del movimento permette di ricavare in maniera non invasiva, informazioni numeriche che permettono la ricostruzione
tridimen-3.4 Protocollo di acquisizione
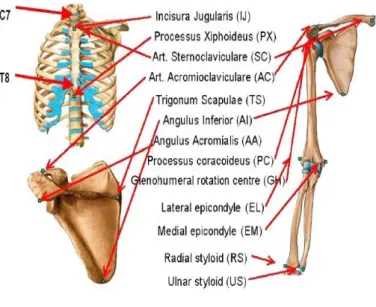
sionale del corpo o di parti di esso, durante l’esecuzione di un task motorio. La ricostruzione richiede la definizione di determinati sistemi di riferimento associati a ciascun segmento corporeo. Queste terne locali vengono definite a partire dalla posizione di alcuni marker su specifici repere anatomici. Tuttavia, `e importante individuare una terminologia standard nella defini-zione dei sistemi di riferimento per l’analisi della cinematica articolare. Per quanto riguarda lo studio della spalla, un punto di partenza per la stan-dardizzazione `e una pubblicazione di Van der Helm (1996). In seguito, l’International Society of Biomechanics (ISB) ha proposto un set standard di punti di repere su cui posizionare i marker (come mostrato in figura 3.15 ) e le linee guida per la definizione dei sistemi di riferimento anatomici per la spalla, il gomito, il polso e la mano, riferendosi alla parte destra del corpo [11]. Le terne vengono costruite in base alla posizione dei marker considerati per lo studio in esame. In generale, per ogni segmento corporeo, l’asse Y `e l’asse longitudinale e gli assi X e Z sono, rispettivamente, gli assi posteriore-anteriore e medio-laterale.
A partire dalla definizione dei sistemi di riferimento anatomici, si ricava-no gli angoli articolari per ciascun giunto. Generalmente, la cinematica di un’articolazione `e la descrizione del movimento relativo tra due segmenti os-sei adiacenti, prossimale e distale [8], in particolare si valuta considerando l’orientamento del sistema di riferimento distale rispetto a quello prossima-le a partire da una posizione iniziaprossima-le [11]. Le rotazioni sono composte da
3.4 Protocollo di acquisizione
Figura 3.15: Punti di repere anatomici sulla base dei quali vengono definiti i sistemi di riferimento anatomici
rotazioni elementari che avvengono sui differenti piani anatomici: rotazione di abduzione-adduzione sul piano frontale, rotazione di flesso-estensione sul piano sagittale e rotazione interna-esterna sul piano assiale.
La sequenza delle rotazioni si prevede nel seguente ordine:
1. angolo di abduzione-adduzione: rotazione del sistema di riferimento (s.d.r) distale, attorno al suo asse antero-posteriore;
2. angolo di flesso-estensione: rotazione del s.d.r distale attorno al suo asse cranio-caudale, in seguito alla prima rotazione;
3. angolo di rotazione interna-esterna: rotazione del s.d.r distale attorno al suo asse longitudinale, nell’orientamento assunto dopo la seconda
3.4 Protocollo di acquisizione
rotazione.
In letteratura, sono descritte diverse convenzioni per descrivere un movimen-to 3D, ma generalmente, in ambimovimen-to biomeccanico, si utilizza la convenzio-ne cardanica suggerita da Grood &Suntay [12], in cui gli assi di rotazioconvenzio-ne coincidono con gli assi articolari e, nel caso in cuisi sceglie una rappresenta-zione dell’orientamento con una sequenza XZY, prevede (partendo da s.d.r. allineati):
una rotazione β attorno all’asse x del sistema di riferimento mobile; una rotazione α attorno all’asse z del sistema di riferimento mobile,
dopo che la prima rotazione `e stata eseguita;
una rotazione γ attorno all’asse y del sistema di riferimento mobile, dopo che le prime due rotazioni sono state eseguite.
Applicando, quindi, opportune sequenze di Cardano (indicate dalla sequen-za degli assi), si ricavano gli angoli articolari che descrivono l’orientamento relativo di due segmenti corporei adiacenti.
A seguire viene descritto il metodo di costruzione di ogni sistema di riferi-mento per torace, scapola, omero e avambraccio.
Torace
3.4 Protocollo di acquisizione
Yt:l’asse passante per il punto medio tra IJ e C7 e il punto medio
tra PX e T8, puntando in direzione craniale. In modo indicativo, in posizione iniziale, il vettore, che ha come origine il punto medio tra PX e T8 (PT) e punta verso il punto medio tra IJ e C7 (IC), deve essere verticale;
Zt:l’asse perpendicolare al piano formato da IJ, C7 e il punto medio
tra PX e T8, puntando in direzione laterale; Xt:l’asse perpendicolare agli assi Yt e Zt.
Figura 3.16: Sistema di riferimento del torace
La sequenza di Eulero Z-X-Y viene utilizzata per descrivere il movimento del torace rispetto al sistema di riferimento globale (quello del laboratorio). La prima rotazione αgt `e relativa al movimento di flessione (negativa) ed
esten-sione (positiva) del tronco; la seconda βgt `e relativa alla flessione laterale del
busto verso destra(positiva) e verso sinistra (negativa); infine, la terza γgt `e
relativa alla rotazione assiale verso destra( negativa) e verso sinistra (posi-tiva). In particolare, il valore angolare della seconda rotazione corrisponde
3.4 Protocollo di acquisizione
all’orientamento del corpo rispetto al sistema di riferimento del laboratorio. Scapola
Os:coincide con AA;
Zs:l’asse passante per TS e AA, puntando verso AA;
Xs:l’asse perpendicolare al piano formato da AI, AA e TS, puntando
in direzione ventrale;
Yt:l’asse perpendicolare agli assi Zs e Xs.
Figura 3.17: Sistema di riferimento della scapola
Omero
Oh:coincide con il centro di rotazione dell’articolazione gleno-omerale
(GH);
Yh:l’asse passante per il punto medio tra EL e EM e GH,in direzione
craniale;
Xh:l’asse perpendicolare al piano formato da EL, EM e GH in direzione
3.4 Protocollo di acquisizione
Zh:l’asse perpendicolare agli assi Zh e Xh.
Figura 3.18: Sistema di riferimento dell’omero
Il centro di rotazione dell’articolazione gleno-omerale GH, essendo un punto di repere interno e non rilevabile mediante palpazione, `e stato stimato me-diante un approccio geometrico (De Leva 1996). GH viene fissato su un asse che va dal punto pi´u craniale dell’articolazione del gomito EL all’acromion AC, e collocandolo, da quest’ultimo, ad una coordinata longitudinale pari al 9.83% della distanza tra centro dell’articolazione del gomito e acromion. Per descrivere il movimento relativo della scapola e dell’omero rispetto al to-race viene utilizzata la sequenza di Eulero X-Z-Y, in accordo con il modello cinematico sviluppato. Avendo schematizzato la scapola con due coppie pri-smatiche e una rotoidale, la sola rotazione interessante `e quella che avviene attorno all’asse x, ovvero quella relativa al movimento di rotazione verso l’al-to. Inoltre, I movimenti di elevazione/depressione e protrazione/retrazione, essendo stati approssimati a delle traslazioni planari sul piano costale, sono stati valutati come lo spostamento del marker AC rispetto al punto IC, fisso al torace, rispettivamente lungo l’asse cranio-caudale ed medio-laterale.
3.4 Protocollo di acquisizione
Per quanto riguarda le rotazioni che descrivono la cinematica dell’articolazio-ne gleno-omerale, la prima `e relativa al movimento di abduzione (negativa) e adduzione (positiva); la seconda `e relativa al movimento di flessione (po-sitiva) ed estensione (negativa); infine la terza `e relativa al movimento di rotazione interna (positiva) ed esterna (negativa).
La medesima scelta per la descrizione di entrambi i movimenti sottolinea la sinergia con il quale le due parti cooperano. Purtroppo, a causa dello scorri-mento relativo tra i marker e il segscorri-mento osseo sottostante, `e difficile, se non impossibile, registrare la rotazione della scapola nella sua totale ampiezza. Pertanto, sar´a anche difficile studiare il ritmo “scapolo-omerale” e stimare che il movimento gleno-omerale e scapolo-toracico stanno in rapporto 2:1. Avambraccio
Of:coincidente con il punto medio tra RS e US;
Yh:l’asse passante per US e il punto medio tra EL e EM;
Xh:l’asse perpendicolare al piano formato da US, RS il punto medio
tra EL e EM;
Zh:l’asse perpendicolare agli assi Yf e Xf.
Per descrivere il movimento relativo dell’avambraccio rispetto all’omero vie-ne utilizzata la sequenza di Eulero Z-X-Y. La prima rotaziovie-ne αa`e relativa al
dell’avambrac-3.4 Protocollo di acquisizione
Figura 3.19: Sistema di riferimento dell’avambraccio
cio; la seconda βaindica il valore relativo al carry-angle, definito nel capitolo
precedente; infine, la terza rotazione γa `e relativa alla pronazione (positiva)
Capitolo 4
Analisi sperimentale
Nella maggior parte dei modelli proposti in letteratura, la spalla `e model-lata mediante un’articolazione socket-ball, semplificando il suo comportamen-to biomeccanico alla sola cinematica dell’articolazione gleno-omerale, resa per´o capace di coprire uno spazio di lavoro paragonabile a quello dell’intera spalla. In realt´a, gli ampi movimenti dell’arto superiore sono resi possibili grazie alla sinergia dell’articolazione gleono-omerale e scapolo-toracica, come descritto nel capitolo 2.
Nel seguente lavoro di tesi `e stato proposto un modello cinematico, in cui, tale complessit´a viene tradotta nel considerare tre GDL aggiuntivi, al fine di ottenere una descrizione pi´u fedele al reale comportamento. Per ciascun modello, entrambi implementati in Matlab, `e stato valutato lo scostamento tra la traiettoria reale dell’end-effector, fornita mediante il sistema ottico e
4.1 Protocollo sperimentale mediante sistemi ottici
quella ricavata dal modello considerato. Con tale prova sperimentale, si vuo-le dimostrare la bont´a del modello cinematico proposto mediante movimenti semplici eseguiti sul piano sagittale e frontale.
Per uno studio completo, `e stato implementato in Matlab il modello cine-matico dell’intero arto superiore a 10 GDL, validandolo su movimenti pi´u articolati, tramite il sistema di motion capture basato su sensori ottici.
4.1
Protocollo sperimentale mediante sistemi
ottici
L’analisi sperimentale viene condotta mediante il sistema ottico ad alta precisione BTS SMART DX-100, che consente la ricostruzione della cine-matica dei segmenti corporei attraverso il rilevamento di opportuni marker, utilizzando un set di telecamere ad infrarossi ad alta precisione. Si trat-ta di un sistema che si basa su telecamere digitrat-tali di nuova concezione che utilizzano sensori a elevata sensibilit´a e illuminatori dal design innovativo e funzionale, la cui potenza di irraggiamento, combinata all’alta risoluzione della telecamera, aumenta il volume di lavoro e consente la cattura di mo-vimenti rapidi e normalmente impercettibili. In tab.4.1 vengono riportate le caratteristiche tecniche della strumentazione di misura, con le quali sono state eseguite le prove sperimentali.
4.1 Protocollo sperimentale mediante sistemi ottici
Al fine di estrapolare i dati biomeccanici d’interesse, permettendo cos´ı uno Tabella 4.1: Caratteristiche tecniche del sistem BTS SMAT-DX 100
Telecamere digitali a raggi infrarossi 4
Risoluzione sensore 640x480 (0.3 M pixel)
Frequenza di acquisizione 100 Hz
Accuratezza < 0.2mm su volume 2x2x2m
Lunghezza d’onda LED illuminatore 850nm
Marker passivi riflettenti 15mm
studio della cinematica dell’arto superiore, `e stato utilizzato un set di 12 marker, posizionati in aderenza alla pelle o al tessuto degli indumenti, in corrispondenza di determinati repere anatomici (4.1) e identificati mediante una procedura di palpazione, rispettando le linee guida ISB.
La prima fase dell’analisi sperimentale consiste nella calibrazione del sistema di misura, mediante la quale si determinano le caratteristiche geometriche ed ottiche delle telecamere (parametri interni) e la posizione e l’orientamento del sistema di riferimento della telecamera rispetto ad una terna globale del laboratorio (parametri esterni).
Terminata la fase di calibrazione, mediante il software integrato SMART-Capture, si procede con l’acquisizione del movimento di studio, eseguito al-l’interno del volume calibrato. Durante tutta la fase di registrazione, ogni marker deve essere visto da almeno due telecamere, anche se nella pratica
4.1 Protocollo sperimentale mediante sistemi ottici
Figura 4.1: Posizione dei marker sui repere anatomici d’interesse.
si raccomanda un numero superiore, in quanto qualcuno pu´o essere oscurato durante l’esecuzione del movimento e la misurazione risulta, anche in caso questo non avvenga, pi´u accurata. Da questa descrizione, emergono due de-gli aspetti critici del sistema ottico, ovvero che le acquisizioni sono limitate nello spazio di lavoro calibrato (precludendo la possibilit´a di monitorare i movimenti del corpo umano nel lungo termine in ambienti esterni al labora-torio di analisi) e che l’eventuale occlusione dei marker, durante l’esecuzione del movimento, inficia sulla corretta acquisizione dei dati. Successivamente, mediante il software SMART-Tracker, si prosegue con la fase di tracking, ov-vero con la ricostruzione tridimensionale della traiettoria di ciascun marker. Questa operazione non presenta grandi difficolt´a quando tutti i marker sono visibili da almeno due telecamere. A causa dei limiti di visibilit´a e
dall’in-4.1 Protocollo sperimentale mediante sistemi ottici
capacit´a di riconoscere due marker vicini, si deve, alcune volte ricorrere, ad un tracking manuale, che potrebbe rappresentare un’ulteriore fonte di errore. Inoltre, in questa fase si cerca di eliminare eventuali artefatti chiamati phan-tom. Questi difetti possono essere provocati dalla sovrapposizione di tracce distinte o dal passaggio dei markers di fronte agli illuminatori che causano uno sfarfallio del segnale.
Infine, il software integrato BTS SMART-Analyzer, permette di creare facil-mente protocolli di calcolo per l’analisi completa del gesto motorio mediante una semplice interfaccia grafica a blocchi (fig. 4.2). In questa fase, parten-do dalla ricostruzione spaziale dei singoli marker, si esegue un’interpolazione lineare a tratti di ciascuna traiettoria. In seguito, vengono creati i sistemi di riferimento per ciascun giunto, seguendo le linee guida ISB, attraverso i quali si risale agli angoli articolari, mediante la corretta applicazione delle rispettive sequenze di Eulero. `e necessario sottolineare che i marker non sono rigidamente connessi con il segmento osseo sottostante e che, anche in condizioni statiche, la posizione ricostruita dei marker non `e stazionaria, a causa di errori intrinseci del sistema di misura [15]. Questo problema influen-za l’accuratezinfluen-za della stima della posizione e dell’orientamento dei segmenti ossei del modello muscolo-scheletrico, relativi ad un sistema di riferimento globale.
4.1 Protocollo sperimentale mediante sistemi ottici
Figura 4.2: Protocollo di analisi sviluppato in SMARTAnalyzer
errori strumentali;
errori dovuti alla dislocazione dei punti di repere anatomici; errori dovuti ad artefatti di tessuti molli (ATM).
Gli errori strumentali sono dovuti da un lato, all’inaccuratezza della cali-brazione e la risoluzione dello strumento di misura e dall’altro, al rumore elettronico, al flickering o sfarfallio del marker (si tratta di un fenomeno che si presenta quando si effettuano riprese video in presenza di fonti di illuminazione artificiale) e alla quantizzazione intrinseca del processo di digi-talizzazione.
Questi errori sono comunque accettabili se confrontati con gli errori dovuti alla dislocazione dei punti di repere anatomici e agli artefatti dei tessuti mol-li.
4.1 Protocollo sperimentale mediante sistemi ottici
La scorretta posizione dei punti di repere anatomici, mediante palpazione, pu´o essere causata da tre principali fattori:
1. dalla condizione che, in realt´a, questi non sono punti ma superfici, a volte larghe ed irregolari;
2. uno strato di tessuto biologico di spessore e composizione variabile riveste i repere;
3. l’identificazione della posizione dei punti dipende dalla procedura di palpazione usata [19].
I movimenti relativi tra marker il segmento osseo sottostante sono genera-ti da deformazione della pelle, che si verifica maggiormente in prossimit´a delle articolazioni e dalla deformazione causata dalla contrazione muscolare. Per loro natura, questi artefatti hanno un contenuto frequenziale simile a quello dei movimenti dell’osso e di conseguenza `e molto difficile distinguerle attraverso qualsiasi tecnica di filtraggio [6]. Purtroppo, questi artefatti si ripercuotono sulla stima della cinematica articolare, rappresentando uno dei problemi irrisolti pi´u rilevanti nell’ambito dell’analisi della cinematica arti-colare in vivo.
4.2 Implementazione in Matlab del modello cinematico dell’arto superiore
4.2
Implementazione in Matlab del modello
cinematico dell’arto superiore
Per un’analisi completa della cinematica articolare `e stato sviluppato un modello dell’arto superiore, secondo la convenzione di Denavit-Hartenberg, in ambiente Matlab. Nello Script principale vengono importati i valori degli angoli articolari, stimati mediante il protocollo sperimentale sviluppato in SMART-Analyzer. Nal paragrafo 4.1 `e stata esplicata la modalit´a con cui sono state stimate le singole variabili di giunto. Inoltre, vengono importate le coordinate spaziali di specifici marker (riferite alla terna globale del laborato-rio in cui `e stato eseguito il movimento); essendo il sistema di riferimento del laboratorio differente da quello del modello, le coordinate spaziali di ciascun marker sono state permutate al fine di renderle coerenti con la terna globale del modello.
In particolare, i marker d’interesse per la costruzione del modello sono: IC che `e considerato l’origine del sistema di riferimento di base del
modello;
AC che `e relativo all’acromion;
E che rappresenta il centro dell’articolazione del gomito; P che rappresenta il centro dell’articolazione del polso;
4.2 Implementazione in Matlab del modello cinematico dell’arto superiore
Inoltre, occorre determinare e importare le lunghezze dei segmenti ossei, con-siderati corpi rigidi. Come gi´a specificato, si tratta di una semplificazione, in quanto vengono trascurati i tessuti molli circostanti, considerati i responsa-bili di una delle sorgenti di errore che maggiormente inficiano sulla misura. Infatti, a causa del movimento relativo tra il marker e il segmento osseo sot-tostante, le lunghezze di ogni link, che rappresentano i segmenti ossei di cui l’arto superiore `e composto, non sono costanti durante tutta l’esecuzione del task motorio; pertanto `e stato considerato il valor medio della lunghezza di ogni link, stimato per l’intera acquisizione. Le lunghezze dei link sono state calcolate, mediante il protocollo sperimentale, come distanza tra il marker AC ed E per il braccio, e come distanza tra il marker E e quello P per l’avam-braccio. Con particolare riguardo alla scapola, le sue dimensioni sono state stimate considerando le coordinate spaziali del marker AC riferite al sistema di riferimento di base con origine in IC.
Per implementare in Matlab il modello cinematico dell’arto superiore, secon-do la convenzione Denavit-Hartenberg, sono state implementate specifiche classi, in cui vengono definite le funzioni che saranno richiamate nello Script principale. In particolare, refFrame e Inclination sono le classi dedicate alla ricostruzione dei sistemi di riferimento di ciascun link, in accordo con la convenzione D-H, in funzione degli angoli articolari dati in ingresso. Inol-tre, sempre in queste classi vengono implemenate le funzioni relative alla rappresentazione grafica di ciascun sistema di riferimento, al fine di avere
4.2 Implementazione in Matlab del modello cinematico dell’arto superiore
una visione chiara e diretta nell’intera cinematica. La classe principale `e KinChain, le cui propriet´a sono il numero dei link, il numero dei giunti e le variabili di giunto e `e costituita da sette metodi, ovvero le funzioni che saranno richiamate nello Script principale. Questa classe permette, richia-mando le funzioni implementate in refFrame e Inclination, di costruire e rappresentare graficamente la catena cinematica del modello, associando un sistema di riferimento per ogni link, e di creare la tabella dei paramen-tri D-H ricevendo in ingresso sia i parameparamen-tri geomeparamen-trici sia le variabili di giunto; inoltre, permette di ricavare le coordinate di ciascun giunto della ca-tena cinematica. In particolare, grazie alla funzione chainPlot `e possibile visualizzare in 3D l’intero modello in diverse configurazioni, coerenti con i valori degli angoli articolari dati in ingresso alla funzione setQ . In fig.4.3 viene illustrato il modello in posizione anatomica, considerata la posizione di partenza per lo svolgimento di qualsiasi movimento. Per rendere pi´u chiara la descrizione del modello, viene riportata una rappresentazione semplificata dell’arto superiore, costituito da cingolo scapolare, braccio e avambraccio, (fig.3.11(a)).
In fig.4.4 `e presentato il modello durante l’esecuzione di un semplice task motorio che consiste nell’abduzione del braccio. La funzione getFramePros permette di ottenere le coordinate spaziali dell’origine di ciascuna terna lo-cale rispetto al sistema di riferimento globale del modello, per ogni istante temporale. Quindi, dato in ingresso un set di variabili di giunto, `e possibile
4.2 Implementazione in Matlab del modello cinematico dell’arto superiore
Figura 4.3: Posizione statica
Figura 4.4: Rappresentazione di un movimento: abduzione del braccio
confrontare, durante l’escursione di tutto il movimento, la posizione dei repe-re anatomici d’interepe-resse con la posizione dei repe-relativi marker. Nello specifico, i repere d’interesse per la fase di studio sono quelli relativi all’acromion, al gomito e al polso, focalizzando particolare attenzione alla posizione del polso,
4.3 Calibrazione cinematica
essendo la parte terminale della catena cinematica scelta.
A partire da questi dati, per ciascun punto e per ogni istante temporale, si stima l’errore di posizione sull’end-effector, espresso in distanza (cm). Ideal-mente, a parit´a dei valori articolari dati in ingresso, l’errore valutato dovrebbe essere nullo. In realt´a, a causa della presenza degli errori intrinseci del si-stema, discussi precedentemente, esiste un certo errore di posizione. Come gi´a spiegato, quelli che inficiano maggiormente sulla misura sono gli errori relativi agli artefatti da tessuto molle e al non corretto posizionamento dei marker. Questi, infatti, essendo il punto di partenza per il calcolo della cine-matica articolare, incidono sulla stima degli angoli di giunto. Inoltre, l’aver considerato come lunghezza dei vari segmenti ossei il rispettivo valor medio costituisce una delle cause dell’errore riscontrato.
Nel presente lavoro di tesi `e ritenuto accettabile un valore di errore intorno a 6 cm in distanza. Talvolta, il verificarsi di un errore superiore al valore della soglia prefissata, porta al ricorrere di una procedura di calibrazione cinemati-ca, mediante la quale si valutano i valori articolari di offset che minimizzano l’errore sull’end-effector.
4.3
Calibrazione cinematica
L’obiettivo della calibrazione cinematica `e quello di ridurre lo scostamen-to tra il valore misurascostamen-to mediante il sistema stereofoscostamen-togrammetrico e il valore