1
1
1
1
1 Introduzione
1.1 Introduzione
La propulsione elettrica è una alternativa alla propulsione chimica e mira ad una riduzione del consumo di propellente, mediante la generazione di una velocità di scarico molto alta. A partire dai primi esperimenti in Unione Sovietica e negli Stati Uniti negli anni Sessanta, la propulsione elettrica si è evoluta in maniera tale da rivelarsi particolarmente adatta per missioni spaziali di posizionamento, trasferimento orbitale e per missioni interplanetarie.
I satelliti per comunicazioni geostazionarie hanno utilizzato i sistemi di propulsione elettrica sin dai primi anni ottanta del Novecento. I satelliti ad orbita bassa, come ad esempio Iridium, hanno fatto uso della propulsione elettrica per modifiche orbitali, ma l’utilizzo della propulsione elettrica come unico mezzo propulsivo è stato ristretto a Deep Space One, veicolo sperimentale della NASA, equipaggiato con un motore a ioni di Xeno.
Sebbene esistano diversi tipi di propulsori elettrici, il più promettente di tutti è sicuramente il propulsore ad effetto Hall. Studiato indipendentemente negli Stati Uniti e nell’Unione Sovietica, il concetto di propulsore ad effetto Hall fu
2
sviluppato in un efficiente strumento di propulsione spaziale nell’ex Unione Sovietica e, dal 1972, vennero usati propulsori ad effetto Hall principalmente per la stabilizzazione dei satelliti, il mantenimento dell’orbita stazionaria e piccole correzioni orbitali.
Oltre 200 propulsori di questo tipo sono stati utilizzati sui satelliti sovietici (e poi russi) negli ultimi 30 anni.
I propulsori di costruzione sovietica sono stati introdotti in Occidente nel 1992 e studiati intensamente nei centri di ricerca statunitensi ed europei.
Il veicolo spaziale dell’ESA, SMART-1, era dotato di un sistema a propulsione elettrica costituente il suo principale mezzo di propulsione: si è trattato di una dimostrazione tecnologica dell’uso fondamentale di un propulsore ad effetto Hall per le missioni future.
L’attuale ricerca sui propulsori ad effetto Hall mira a risolvere alcuni problemi connessi con la loro applicazione nelle missioni spaziali, sviluppando propulsori con una potenza più elevata della tipica potenza di 1 kW, propulsori in grado di avere un più alto e variabile impulso specifico e con una più lunga operatività, per consentirne l’utilizzo nelle missioni scientifiche nello spazio profondo.
1.2 La propulsione elettrica
Lo sviluppo dei sistemi di propulsione elettrica è stato stimolato dalle limitazioni nel tradizionale campo della propulsione chimica, derivante dalle leggi della dinamica di Newton.
Un veicolo spaziale con propulsione a razzo trae la sua accelerazione dallo scarico del propellente e la sua equazione del moto (trascurando la forza di gravità e la resistenza) deriva direttamente dalla conservazione del momento totale del veicolo e dal corso del propellente:
e v dt dm dt dv m = (1.1)
3 con
m
Massa del veicolo variante nel tempo (istantaneamente)dt
dv Accelerazione del veicolo
e
v Velocità del flusso di scarico
dt
dm Variazione della massa del veicolo
dovuta all’espulsione del propellente
Il prodotto tra la variazione di massa e la velocità del flusso di scarico è rappresentato dalla spinta (
T
) generata dal sistema propulsivo:e v dt dm
T = ⋅ (1.2)
Si può trattare questa spinta come se ci fosse una forza esterna applicata al veicolo.
L’integrale della spinta rispetto al tempo fornisce l’Impulso o variazione di momento, mentre il rapporto tra la spinta e la quantità di propellente espulso (misurata in unità di peso per secondo) rappresenta l’Impulso specifico.
0 g v W T I e sp = = (1.3) con sp I Impulso specifico 0
g Accelerazione gravitazionale al livello del mare 0
g dt dm
4
Se la velocità di scarico rimane costante durante il tempo di spinta, il veicolo spaziale subisce un incremento di velocità, che è linearmente dipendente dalla velocità di scarico e, in maniera logaritmica, dipendente dalla massa del propellente espulsa: t e m m v v= ln 0 Δ (1.4) con v Δ Incremento di velocità e
v Velocità del flusso di scarico
0
m Massa del veicolo all’inizio della fase di spinta t
m Massa del veicolo al termine della fase di spinta
La massa del veicolo spaziale al termine della missione è data da:
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ Δ− = e t v v m m exp 0 (1.5)
L’incremento di velocità richiesto per una missione o manovra prestabilita è un indice del bisogno energetico della stessa missione o operazione. Se un veicolo spaziale libera una grossa parte della sua massa iniziale per arrivare a destinazione, l’equazione della frazione di massa ottenibile mostra che la velocità di scarico del sistema di propulsione deve essere comparata con l’incremento di velocità richiesto.
I sistemi di propulsione chimica del veicolo spaziale producono la spinta espandendo termodinamicamente il gas propellente tramite un ugello. L’energia necessaria a riscaldare il propellente è immagazzinata nei legami chimici del propellente o nella combinazione propellente/ossidante e liberata
5 attraverso la decomposizione in sistemi a propellente singolo o tramite reazione chimica in sistemi multi - propellente.
I sistemi di propulsione chimica sono limitati dalla quantità di energia di reazione disponibile e da problemi di trasferimento del calore per velocità di scarico di qualche migliaio di metri al secondo. Comunque, numerose missioni spaziali future richiederanno incrementi di velocità che saranno dell’ordine di grandezza, o addirittura maggiori, di queste.
Per missioni che richiedono un alto incremento di velocità è, pertanto, richiesto un metodo alternativo di propulsione, caratterizzato da un impulso specifico, o velocità di scarico del gas, maggiore rispetto a quello che può essere raggiunto mediante la propulsione chimica. La propulsione elettrica offre appunto questa possibilità.
I sistemi di propulsione elettrica dei veicoli spaziali creano la spinta ricorrendo a processi elettrici e, possibilmente magnetici, per accelerare il propellente. Forme più intense di riscaldamento del propellente, usate nei sistemi di propulsione elettrotermica, offrono la possibilità di incrementare la velocità di scarico, ma, d’altro canto, ci si imbatte nelle limitazioni dovute alle restrizioni di temperature, che devono essere sopportate dai componenti del motore a contatto con il flusso del gas propellente. L’espansione termodinamica può essere abbandonata in favore dell’applicazione diretta delle forze di massa alle particelle del flusso di propellente. Questo è il metodo usato dai sistemi di propulsione elettrostatico ed elettromagnetico.
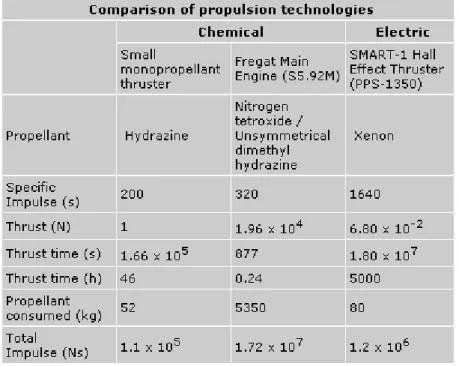
Nella tabella successiva, vengono paragonate le tecnologie di propulsione spaziale:
6
Tabella 1.1: Paragone fra la propulsione elettrica e la propulsione chimica
1.2.1
La Propulsione Elettrica e la Propulsione
Chimica
Mentre i sistemi di propulsione chimica traggono la loro energia dai propellenti, l’energia richiesta dai sistemi di propulsione elettrica è generata da pannelli solari.
L’uso di questi pannelli per fornire potenza al sistema di propulsione elettrica riguarda la propulsione elettrica solare (SEP). Le missioni future, operanti ad alti livelli di potenza o a grandi distanze dal Sole, richiederanno una fonte alternativa di potenza. Se le preoccupazioni per la sicurezza possono essere superate, la potenza può essere fornita da un sistema di energia elettrica nucleare, in cui il calore ottenuto da un reattore è utilizzato per la produzione di
7 energia elettrica, tramite conversione termoelettrica diretta o termoionica, usando dispositivi a stato solido, o indiretta tramite ciclo termodinamico.
La propulsione chimica viene definita “a energia limitata”, poiché i reagenti chimici hanno un importo fisso per unità di massa, il che limita la velocità di scarico o l’impulso specifico ottenibili. Tuttavia, poiché i propellenti costituiscono la loro propria fonte di energia, il ritmo con cui l’energia può essere fornita al propellente stesso (che in ultima analisi è limitata dalla reazione cinetica) è indipendente dalla massa di quest’ultimo, così possono essere raggiunti elevati livelli di potenza e spinta.
I sistemi di propulsione elettrica non sono limitati dal punto di vista dell’energia. Trascurando considerazioni sulla durata del componente, una grande quantità di energia può essere arbitrariamente liberata (dal Sole o da un sistema di potenza nucleare) per una data massa di propellente in modo che la velocità di scarico (o l’impulso specifico) possa essere molto più grande di quella ottenibile da un sistema di propulsione chimica.
I sistemi di propulsione elettrici sono definiti “ a potenza limitata”, perché il ritmo con cui l’energia è fornita al propellente da una fonte esterna è limitato dalla quantità di massa disponibile per il sistema elettrico.
Questo è ciò che si ottiene limitando la spinta del sistema di propulsione elettrica per una data quantità di massa del veicolo spaziale. A causa di ciò i veicoli a propulsione elettrica tendono ad essere caratterizzati da bassa spinta a basso rapporto di massa e, quindi, a minima accelerazione.
Sebbene i veicoli a propulsione elettrica presentino bassa spinta a bassi rapporti di massa, possono avere una grande quantità di impulso (il prodotto tra l’impulso specifico e la massa di propellente pari alla variazione totale di momento) rispetto ad un sistema a propulsione chimica. Quindi, anche se un sistema a propulsione chimica può offrire un elevato rapporto spinta/massa, il propellente è speso in minor tempo a basso impulso specifico.
Per contro il basso rapporto spinta/massa di un sistema di propulsione elettrica può operare per periodi che vanno da ore ad anni ed ottenere un elevato valore dell’impulso totale.
8
1.2.2
La potenza per la propulsione elettrica
Nonostante i sistemi di propulsione elettrica offrano, rispetto ai sistemi basati sulla propulsione chimica, più alti valori della velocità di scarico o di impulso specifico, vi è comunque una perdita in termini di performance. La massa totale appartenente ad un sistema a propulsione chimica è ricavata dalla massa del propellente, dal motore stesso e dal sistema di controllo.
I sistemi a propulsione elettrica dispongono, oltre a questi componenti, di una fonte di potenza e di un controllore di potenza. La massa di questi componenti è compensata dalla massa risparmiata essendo in grado di soddisfare la velocità di missione usando una ridotta massa di propellente.
La massa della potenza fornita scalata in proporzione alla potenza richiesta è data da:
(1.6)
p
m Massa della Potenza fornita
s
m Massa specifica della Potenza fornita (massa per
unità di potenza)
P
Potenza richiesta per la propulsioneLa potenza richiesta per ottenere la spinta desiderata è data da:
2
(1.7)
con
t
P Potenza necessaria per ottenere la
spinta desiderata
e
ν
Velocità di scarico del gas9 Il rapporto tra la potenza richiesta per la propulsione e la potenza necessaria per ottenere il valore di spinta desiderato viene definito come segue:
P T P Pt e 2 ν η = = (1.8)
con
η
rendimento di conversione (trasformazione).Segue dunque che la massa della potenza richiesta è data da:
2 2 (1.9)
Si noti come la massa della potenza richiesta dipenda dal quadrato della velocità di scarico.
La massa del propellente richiesto è inversamente proporzionale alla velocità di scarico per cui esiste, per ogni dato cambiamento della velocità, un valore ottimo della stessa velocità di scarico che minimizza la somma delle masse della potenza richiesta e del propellente.
L’equazione della massa della potenza richiesta mostra l’importanza di ottenere un basso valore della massa specifica della potenza richiesta ed un alto valore del rendimento di conversione per conseguire il massimo vantaggio dall’uso della propulsione elettrica.
1.2.3
Tipi di propulsione elettrica
I sistemi di propulsione elettrica vengono comunemente divisi in tre categorie, sulla base del metodo usato per accelerare il propellente: elettrotermici, elettrostatici ed elettromagnetici.
10
In pratica, i sistemi propulsivi realizzati frequentemente usano simultaneamente uno, due o anche tutti e tre i metodi indicati. Ne sono un esempio i motori ad effetto Hall, per i quali non può valere la catalogazione classica.
1.2.3.1
Propulsione Elettrotermica.
I sistemi che sfruttano un tipo di propulsione elettrotermica accelerano il propellente utilizzando il calore. Ci sono due tipi principali di propulsori: resistogetti e arcogetti.
a) Resistogetti.
I resistogetti operano facendo passare un propellente gassoso attraverso una resistenza elettrica e, successivamente, espandendo il gas attraverso un ugello convenzionale per creare la spinta.
Figura1.1. Diagramma di un resistogetto
I resistogetti vengono normalmente utilizzati per potenziare sistemi di propulsione chimica, in cui il calore elettrico è usato per espandere ulteriormente ed accelerare il propellente, che ha già subito una reazione chimica.
11 Le applicazioni di maggior successo di questa tecnica sono stati il superriscaldamento di idrazina decomposta, che offre il vantaggio di essere un carburante comune per sistemi di propulsione chimica monopropellenti.
L’impulso specifico che può essere raggiunto con i resistogetti ad idrazina è limitato a causa della massa molecolare relativamente alta del gas utilizzato, e perché la massima temperatura di riscaldamento superficiale, che può essere sopportata con i materiali attualmente disponibili, è limitata a circa 3000 K. Questo limita la velocità di scarico raggiungibile a pressappoco 3500 metri al secondo (ISP = 350 s), comunque circa il 40% in più rispetto al caso senza
super-riscaldamento e con una efficienza superiore all’80%.
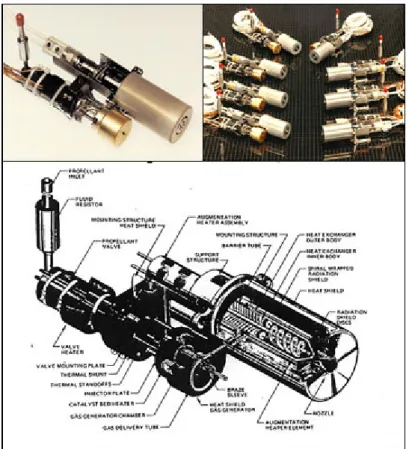
Figura 1.2. Immagine e schema di un resistogetto 500 W Aerojet MR-501B EHT, usato per station-keeping nei satelliti
per telecomunicazioni.
I resistogetti furono usati per la prima volta sperimentalmente nello spazio durante gli anni Sessanta del secolo scorso. Il loro primo utilizzo operativo fu
12
per missioni di Station Keeping Nord-Sud sui satelliti geostazionari per telecomunicazioni Intelsat-V, negli anni ’80. I resistogetti erano anche utilizzati per inserimento in orbita, controllo d’assetto e de-orbiting nei satelliti della costellazione Iridium.
b) Arcogetti
Affinché i sistemi di propulsione elettrotermici possano raggiungere velocità di scarico molto più alte di 10000 metri al secondo, una parte del flusso di propellente deve raggiungere temperature superiori a 10000 K e, allo stesso tempo, deve essere tenuto lontano dalle pareti del componente. Ciò viene realizzato facendo passare il propellente attraverso un arco elettrico, che lo riscalda prima che si espanda nell’ugello.
Figura1.3. Schema di un arcogetto
La temperatura raggiunta nell’arco è compresa fra 10000 e 20000 K, il che implica una velocità di scarico fra i 5000 e i 6000 metri al secondo (ISP = 500 –
13
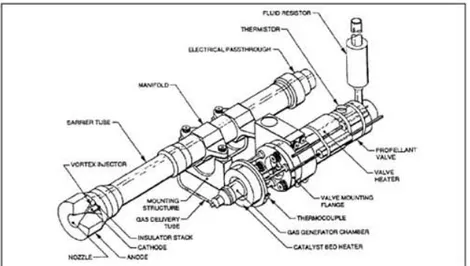
Figura 1.4. Assemblaggio di un arcogetto
I propulsori ad arcogetto sono entrati nell’uso commerciare per missioni di station keeping per i satelliti geostazionari per telecomunicazioni Telstar-4 nel 1993. Arcogetti ad alta potenza forniscono una spinta sufficiente per il trasferimento orbitale o per le manovre principali, ma la loro introduzione nelle missioni operative è stata ritardata a causa dei problemi connessi con l’erosione dell’elettrodo e la disponibilità di sufficiente potenza elettrica.
1.2.3.2
Propulsione elettromagnetica
La propulsione elettromagnetica usa campi elettrici e magnetici ortogonali per applicare la forza di Lorentz sugli atomi di propellente ionizzato, accelerandoli fuori dal piano dei campi. Le tecniche di propulsione elettromagnetica attualmente utilizzate e studiate includono “pulsed plasma thrusters” (PPT) e i propulsori magnetoplasmadinamici (MPD).
a) Propulsori a plasma pulsato (PPT)
I propulsori PPT con propellente solido sono usati per sistemi di propulsione a bassa potenza, tipicamente con una potenza media inferiore a trenta Watt.
14
L’energia elettrica immagazzinata nei condensatori viene utilizzata per creare una scarica ad arco pulsata lungo una faccia di un blocco di propellente, generalmente viene utilizzato il teflon. La combinazione di un flusso termico, di un bombardamento di particelle e di reazioni superficiali, fa si che una piccola parte del materiale solido (circa 1.5 μg J-1) subisca una ablazione e una ionizzazione. Il picco della corrente di scarica è alto, nell’ordine di decine di kA. Il campo magnetico autoindotto agisce sugli ioni muovendoli nel campo elettrico creato dalla scarica e crea una forza di Lorentz che accelera il plasma.
Figura1.5. Schema di funzionamento di un PPT
I PPT che utilizzano teflon sono stati usati limitatamente alle missioni si station keeping Est-Ovest. I PPT non producono sufficiente spinta per essere considerati dei candidati validi a provvedere alla propulsione del futuro per missioni fuori dall’orbita terrestre.
15
Figura1.6. PPT
b) Propulsori Magnetoplasmadinamici
I propulsori magnetoplasmadinamici (MPD) furono “inventati” per sbaglio. Dei ricercatori stavano investigando l’effetto della portata di massa su un arcogetto, quando notarono che, mentre la spinta dell’arcogetto inizialmente calava con il decrescere della portata, come previsto, la spinta iniziava invece ad aumentare diminuendo la portata, una volta che era stata raggiunta una portata sufficientemente bassa. Tale risultato apparentemente impossibile, in realtà segnalava la transizione da un riscaldamento elettrotermico ad una accelerazione elettromagnetica man mano che il calore della portata diminuiva. I dispositivi elettromagnetici fanno passare una grande corrente attraverso una piccola quantità di gas per ionizzare il propellente. Una volta ionizzato, il plasma è accelerato da una forza elettromagnetica, detta forza di Lorentz: Tale forza è creata dall’interazione di una corrente, j, con un campo magnetico, B. La corrente è generata fra due elettrodi, uno positivo e uno negativo. La corrente radiale induce un campo magnetico azimutale e circolare. La forza di
16
Lorentz, agendo sugli ioni in movimento nella corrente di scarica, accelera il plasma lungo l’asse della struttura.
Figura1.7. Principio operativo di un MPD
I propulsori MPD operano ad alti livelli di potenza, kilowatt o megawatt, e forniscono un’alta spinta con un moderato impulso specifico. Una variante possibile consiste nell’utilizzare un campo magnetico applicato esternamente per permettere di operare a bassi livelli di potenza.
Gli MPD sono stati testati in laboratorio sia con missioni di test sia dimostrative. Tuttavia, la tecnologia degli MPD non è sufficientemente matura e i propulsori consumano troppa potenza per essere considerati dei candidati a costituire il sistema propulsivo principale del futuro.
17
Figura1.8. Un propulsore MPD
1.2.3.3
Propulsione elettrostatica
I sistemi di propulsione elettrostatica accelerano il propellente ionizzato con l’azione di un campo elettrico. I tipi principali di propulsori elettrostatici sono: propulsori elettrostatici ad effetto di campo (FEEP), propulsori colloidali, propulsori a ioni con griglia.
a) Propulsori elettrostatici ad effetto di campo (FEEP)
I propulsori elettrostatici ad effetto di campo (FEEP) si basano sulla capacità di un forte campo elettrico (circa 1010 V m-1) di estrarre ioni individuali da un
18
metallo facilmente ionizzabile, come ad esempio un metallo alcalino. La tecnica è stata dimostrata in laboratorio usando cesio liquido come propellente. Con un voltaggio di estrazione/accelerazione di 10 kV è possibile raggiungere velocità di scarico di 100000 metri al secondo (ISP = 10000 s).
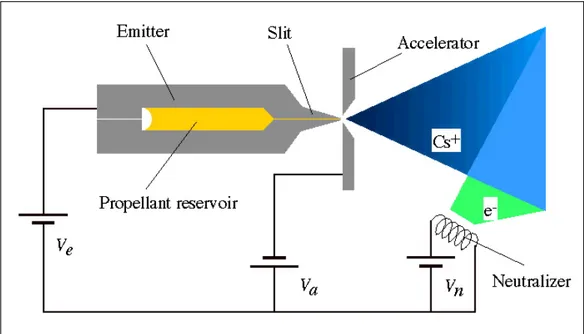
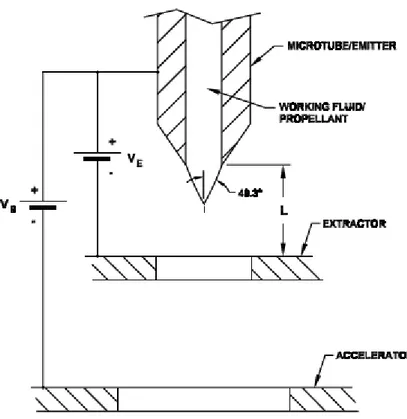
Figura 1.9. Schema di funzionamento di un FEEP al cesio
I propulsori FEEP al cesio garantiscono una alta efficienza (si avvicina al 100%), ma la spinta disponibile è molto piccola (da 1μN a 5mN per i motori testati a terra), così come piccola è la spinta per unità di potenza (circa 15 μN W-1). Il basso rapporto spinta/potenza e i problemi causati dal cesio che contamina e attacca la superficie hanno a lungo bloccato l’uso dei propulsori FEEP nelle missioni operative.
I propulsori FEEP producono una spinta comunque insufficiente per essere utilizzati come propulsori principali nella propulsione del futuro.
19
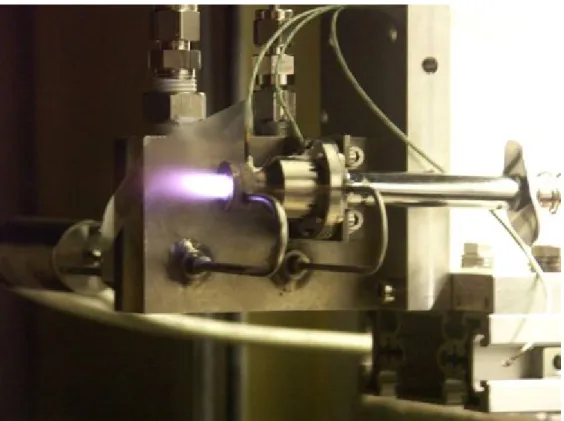
Figura 1.10. FEEP in funzionamento in laboratorio
b) Propulsori colloidali
I propulsori colloidali emettono particelle cariche che sono accelerate elettrostaticamente per produrre spinta. Un propulsore colloidale è un meccanismo “elettrospray” che consiste in un emettitore e uno o più elettrodi coassiali.
I recenti sforzi per sviluppare tali motori sono stati frustrati dall’incapacità di ottenere un rapporto abbastanza alto fra carica e massa per le particelle estratte, portando ad una differenza di potenziale per l’accelerazione molto alta (> 100 kV) e ad un rapporto fra carica e massa non uniforme.
20
Figura 1.11. Schema di un propulsore colloidale
Questi problemi sono stati parzialmente risolti e i propulsori colloidali con velocità di scarico nell’ordine di 10000 metri al secondo (ISP = 1000 s) sono
stati testati al suolo; tuttavia, la tecnologia di tali propulsori deve ancora essere studiata a lungo prima di permetterne l’utilizzo per missioni operative.
c) Motori a Ioni
Negli acceleratori di ioni a griglia, detti anche motori a ioni, gli ioni vengono prodotti in una camera di ionizzazione, contenuta magneticamente, da una
corrent risonan L’uscit griglia, quali è Gli elet sistema potenzi elettron neutral La neu cariche carico, danni p I propu di 300 te di scaric nza di ciclot ta della cam , con uno sp applicato u ttroni vengo a di potenz iale leggerm ni provenie izzandolo. Figura utralizzazion e da un veic compromet permanenti. ulsori a ioni 00 metri a ca, da una trone. mera di ion pazio di circ un potenzial ono estratti za verso u mente super enti dal cat
a 1.12. Schem ne del fluss colo spazia ttendo l’ope i sono in gr al secondo energia d nizzazione ca un millim e di acceler dalla camer un catodo n riore a que todo si com ma di funzio so di ioni è ale, implica eratività de rado di ragg (ISP = 300 di radio fre è provvista metro, o me razione degl ra per mezz neutralizzat ello della g mbinano co onamento di u necessario che lo stes gli altri sist
giungere ve 00 s). Dim equenza e a di una str eno, fra le d li ioni. zo di un ano tore esterno riglia di ac ol flusso d un motore a , perché em sso veicolo temi del vei
locità di sc mostrata l’op da una sta ruttura a d due griglie, odo e spinti o, tenuto a ccelerazione di ioni in u ioni mettere part spaziale di icolo e caus arico dell’o peratività d 21 abilita oppia fra le da un ad un e. Gli uscita ticelle iventi sando ordine di tali
22
propulsori nei primi anni ’90, i motori a ioni sono stati utilizzati per missioni di station keeping su satelliti geostazionari. Nel 1998, la Nasa ha lanciato Deep Space 1, avviando la prima missione interplanetaria che utilizza la propulsione a ioni.
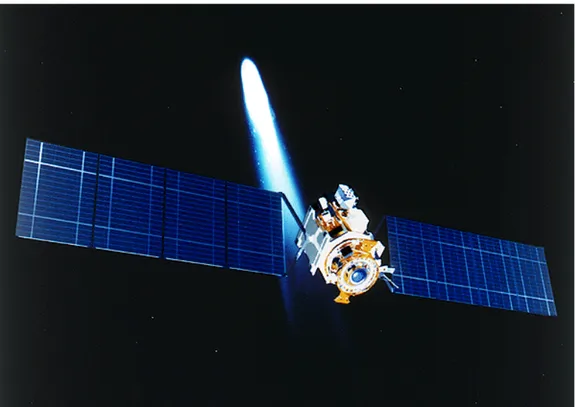
Figura 1.13. Deep Space 1
I propulsori a ioni hanno una bassa densità di spinta (spinta disponibile per unità di area di scarico), perché la massima densità di corrente ionica che può essere sostenuta è limitata dal campo elettrico applicato.
23
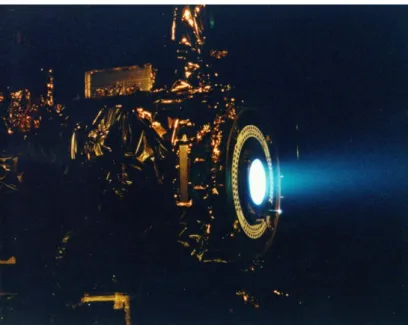
Figura 1.14. Motore a ioni in funzionamento
1.2.3.4
Propulsori ad effetto Hall
I propulsori ad effetto Hall sono motori a ioni senza griglia, che producono spinta accelerando elettrostaticamente un plasma di ioni fuori da una camera anulare.
Essi sfruttano l’effetto Hall mediante l’utilizzo di appropriate geometrie del canale e dei campi magnetico ed elettrico, per fare in modo di bloccare gli elettroni del plasma su un percorso quasi trasversale al flusso, lasciando così liberi di accelerare, nella direzione del campo elettrostatico, gli ioni positivi. L’efficienza, sia del sistema di produzione degli ioni che del processo accelerativo, permette ai propulsori ad effetto Hall di produrre un’ottima combinazione di spinta ed impulso specifico. Inoltre, da un punto di vista sistemistico, i voltaggi relativamente bassi richiesti da queste apparecchiature, semplificano enormemente le richieste sul condizionamento di potenza.
24
Figura 1.15. Motore ad effetto Hall montato in camera a vuoto.
1.3 Motivazioni, contenuti e obiettivi della tesi
Il presente lavoro di tesi si inserisce nell’ambito della diagnostica delle caratteristiche del plasma di un motore ad effetto Hall tramite sonde di Langmuir multiple.
L’obiettivo principale di questa investigazione è misurare la temperatura elettronica e la densità del plasma nel getto di un propulsore ad effetto Hall da 100 W mediante una sonda di Langmuir tripla.
25 Nella presente tesi, si procederà a:
• Elaborare un apparato sperimentale che implementi l’uso di una sonda di Langmuir tripla nel getto di un propulsore HT-100 utilizzando le strumentazioni presenti al centro Alta di Pisa. Tale obiettivo richiede i seguenti prerequisiti:
− Esaminare la teoria delle sonde triple e determinare l’applicabilità della teoria al caso in questione;
− Disegnare e impostare l’ambiente di lavoro della sonda di Langmuir;
− Stabilire delle procedure per la fase sperimentale e i relativi obiettivi.
• Costruire un circuito elettrico per la sonda di Langmuir, da collegare ad un oscilloscopio a quattro ingressi. Implementare un modello di calcolo per verificare, mediante simulazione al computer, il corretto funzionamento del circuito.
• Utilizzare la sonda di Langmuir tripla per misurare la temperatura elettronica e la densità del plasma nel getto di un motore ad effetto Hall HET-100. Verificare l’eventuale erosione della sonda e il corretto funzionamento del circuito.
• Stabilire una procedura di analisi dei dati e sviluppare un codice al computer che implementi la teoria delle sonde di Langmuir tripla adottata.