Capitolo 2 - Gli standard IEC
I comitati e sottocomitati tecnici dell’IEC sviluppano gli standard internazionali e altri tipi di pubblicazioni per una determinata area dell'elettrotecnica. Queste pubblicazioni si dividono in due grandi categorie:
Le pubblicazioni normative riflettono accordi sulla descrizione tecnica delle caratteristiche che devono essere soddisfatte da un prodotto, sistema, servizio od oggetto in questione;
Le pubblicazioni informative forniscono invece informazioni di base, come le procedure di attuazione o le linee guida.
Gli standard internazionali e le altre pubblicazioni sono il risultato di un consenso internazionale tra i membri del IEC (i vari Comitati nazionali). Qualsiasi membro della IEC può partecipare ai lavori preparatori di una norma internazionale, insieme a qualsiasi organizzazione internazionale, ampia organizzazione regionale, consorzio o forum.
Le pubblicazioni IEC sono stilate in inglese e francese, mentre il Comitato Nazionale della Federazione Russa prepara le edizioni in lingua russa. Alcune pubblicazioni sono state anche tradotte in spagnolo.
Si analizzeranno ora gli standard richiesti dalla Direttiva MED, con particolare attenzione allo standard IEC 62388 che tratta in modo particolare le prestazioni richieste agli EUT.
2.1 IEC 60945
Lo standard IEC 945 è stato originariamente prodotto per fornire metodi di prova e valori limite per i requisiti nel rispetto della risoluzione IMO A.574(14), la quale è nient’altro che un elaborato contenente le caratteristiche generali raccomandate per i sussidi di navigazione elettronica.
redatte in tempo utile per la pubblicazione dello standard originale, sono state aggiunte successivamente nel 1992 come emendamento 1.
Nel 1991 l'IMO, al momento di discutere le modifiche da introdurre con l'introduzione del sistema di soccorso e di sicurezza marittima globale (GMDSS), ha osservato che, in futuro, le apparecchiature radio sarebbero installate sul ponte di una nave a fianco degli equipaggiamenti di navigazione invece che in una speciale sala radio come fino a quel momento. L'IMO ha conseguentemente ritirato la risoluzione A.574(14) e la corrispondente risoluzione A.569(14), relativa ai requisiti generali di apparecchiature radio, e li ha sostituiti con la risoluzione IMO A.694(17). Una seconda edizione della IEC 945 è stata rapidamente preparata per riflettere questa modifica. La terza edizione della IEC 945 nel 1996 è una revisione completa che allinea i metodi di prova adeguati con altri standard IEC e introduce, per quanto possibile, i requisiti delle società di classificazione. Il campo di applicazione è stato esteso per rendere la norma applicabile ad altri apparecchi installati sul e intorno al ponte di una nave per quanto riguarda la compatibilità elettromagnetica. È stata aggiunta, insieme a migliori definizioni di test operativi che coinvolgono il giudizio soggettivo e descrizioni di aspetti operativi e di durabilità del software, una nuova classe di materiali “portatili". Questa quarta edizione (ora IEC 60945) si estende in dettaglio ai test operativi, in particolare per le attrezzature gestite attraverso i menu software. Essa è il derivato di un'indagine esaustiva sui riferimenti appropriati descritti nella sua bibliografia. Il layout della clausola 4 (requisiti prestazionali minimi) è stato modificato per dare un migliore raggruppamento dei requisiti di ergonomia, hardware e software. Le prove EMC sono state riviste con la gamma di frequenza estesa da 1 GHz a 2 GHz.
Questa norma specifica quindi i requisiti minimi di prestazione, i metodi di prova e i risultati dei test necessari per:
le apparecchiature radio a bordo della nave facenti parte del sistema globale di soccorso e sicurezza marittima richiesto dalla Convenzione internazionale per la salvaguardia della vita
umana in mare (SOLAS) e dalla Convenzione internazionale di Torremolinos sulla sicurezza delle navi da pesca e successive modificazioni;
le apparecchiature di bordo per la navigazione come richiesto dalla Convenzione internazionale per la salvaguardia della vita umana in mare (SOLAS) e dalla Convenzione internazionale di Torremolinos sulla sicurezza delle navi da pesca e altri aiuti alla navigazione;
tutte le altre apparecchiature montate sul ponte, le attrezzature in prossimità di antenne riceventi e apparecchiature in grado di interferire con la navigazione sicura della nave e con le radiocomunicazioni (cfr. risoluzione IMO A.813) per quanto riguarda la parte EMC.
2.2 Serie IEC 61162
La norma internazionale IEC 61162 è uno standard in quattro parti che specifica i requisiti per le interfacce digitali per le applicazioni di radiocomunicazione, navigazione marittima e l’integrazione dei sistemi. Le quattro parti sono:
IEC 61162-1: single talker e più listener;
IEC 61162-2: single talker e più listener con trasmissione ad alta velocità;
IEC 61162-3: multiple talker e multiple listener - rete dati seriali; IEC 61162-4: multiple talker e multiple listener -
interconnessione dei sistemi della nave .
Le norme tecniche per le interfacce sono sviluppate con il contributo di produttori, organizzazioni private e governative e operatori. Le informazioni
applicazioni e della tecnologia, gli standard di interfaccia possono e devono cambiare. L’IEC invita quindi ad informare immediatamente riguardo eventuali carenze.
La IEC 61162-1 contiene i requisiti per la comunicazione di dati tra strumentazione marittima elettronica e apparecchiature di radiocomunicazione quando interconnessi mediante un sistema adeguato. Questa parte della IEC 61162 è destinata a supportare la trasmissione dati seriale unidirezionale point-to-multipoint. Questi dati sono in forma ASCII stampabile e possono includere informazioni come posizione, velocità, profondità, assegnazione delle frequenze, ecc. I messaggi tipici possono essere da circa 11 ad un massimo di 79 caratteri e generalmente non richiedono la trasmissione di più di un messaggio per secondo.
Le definizioni elettriche di questo standard non sono destinate alle applicazioni a banda larga come radar o video imaging. Poiché non vi è alcuna disposizione per garantire la consegna dei messaggi e una capacità di controllo degli errori limitato questa norma deve essere usato con cautela in tutte le applicazioni di sicurezza. Per le applicazioni in cui è necessaria una velocità di trasmissione più veloce si rimanda alla norma IEC 61162-2.
La IEC 61162-3 si basa sullo standard NMEA 2000 che contiene i requisiti per l'implementazione di una rete di comunicazione di dati seriale per collegare gli apparecchi elettronici marini a bordo. Le apparecchiature progettate seguendo questo standard avranno la possibilità di condividere dati, inclusi i comandi e lo stato, con altri apparecchi compatibili su un singolo canale di segnalazione.
I dati vengono trasmessi come una serie di frame di dati, ciascuno con un robusto controllo errori, conferma di consegna e tempi di latenza garantiti. Dato che il contenuto di dati effettivo di un frame di dati è al massimo il 50% dei bit trasmessi, questo standard è principalmente destinato a supportare messaggi relativamente brevi che possono essere trasmessi periodicamente, se necessario, o su richiesta utilizzando comandi di interrogazione. I dati tipici includono parametri discreti come latitudine e longitudine, valori di stato
GPS, comandi per sistemi di autopilotaggio, liste di parametri finiti come i waypoint e blocchi di dati di medie dimensioni come gli aggiornamenti del database della cartografia elettronica, ma non è destinato a supportare applicazioni a banda larga come radar o video imaging.
Questo standard definisce tutti gli strati del modello ISO/OSI, dal livello applicativo al livello fisico, necessari per implementare le funzionalità di rete richieste. Definisce quindi il formato dei dati, i protocolli di rete e il livello fisico minimo necessario per i dispositivi di interfaccia. Le applicazioni SOLAS devono impiegare strutture ridondanti (ad esempio reti duali, circuiti di interfaccia di rete ridondanti) per ridurre l'impatto dei guasti. Lo standard NMEA 2000 fornisce gli strumenti e metodi fondamentali per supportare apparecchiature ridondanti, bus e messaggistica.
La serie IEC 61162-4xx standardizza l'impiego di Ethernet per le reti di navigazione di bordo. La specifica descrive il trasporto di frasi NMEA come definito nella 61162-1 su IPv4. A causa della bassa quantità di complessità protocollo è stato soprannominato Lightweight Ethernet (LWE).
2.3 IEC 62288
Lo standard IEC 62288 specifica i requisiti generali, i metodi di prova e i risultati dei test richiesti per la presentazione delle informazioni sui display di navigazione di bordo a sostegno della risoluzione IMO MSC.191 (79). Questa armonizza i requisiti per la presentazione delle informazioni di navigazione per garantire che tutti i display adottino un’interfaccia uomo-macchina coerente. La IMO MSC.191 (79) integra e, in caso di conflitti, ha la priorità rispetto i requisiti di presentazione delle singole norme di funzionamento adottate dall'IMO per impianti ed attrezzature di navigazione, coprendo inoltre la parte riguardo la presentazione di informazioni connesse con apparecchiature per le quali non sono specificati standard.
circolare SN/Circ.243 insieme ad alcuni requisiti pubblicati nella risoluzione MSC.192 (79) sui radar, nella risoluzione MSC.232 (82) sull’ECDIS10 e nella
circolare MSC/Circ.982 riguardo i criteri di ergonomia.
Alcuni requisiti stabiliti dalla MSC.191 (79) sono identici a quelli stabiliti in altri documenti IMO (per esempio , le risoluzioni A.694 (17), MSC.192 (79) , MSC.232 (82) , ecc.) o nelle norme IEC sui metodi di prova e i risultati delle prove richieste per tali requisiti (per esempio, IEC 60945, IEC 61174, IEC 62388, ecc.). Qualora un requisito in questo standard sia uguale ad un requisito in un'altra pubblicazione, il metodo di prova può essere quello dell’altro standard.
La IEC 62288 è organizzata in modo tale che ciascun gruppo di requisiti sia immediatamente seguito da una clausola che identifica il metodo di prova. I metodi di prova sono derivati dalla ISO 9241-12 per la presentazione di informazioni sui display visivi. Tutto il testo in questa normativa la cui formulazione è identica al testo contenuto in un documento IMO è stampato in corsivo col riferimento al documento riportato all'inizio del paragrafo. La notazione contiene un prefisso di riferimento al documento e un suffisso con il numero di paragrafo dal documento (per esempio, (MSC191/1), (SN243/1), ecc.).
2.4 IEC 62388
Lo standard IEC 62388 specifica i requisiti operativi e di prestazioni minime di un apparato radar navale, i metodi di prova e i risultati richiesti in conformità alla risoluzione IMO MSC.192 (79). Quando un requisito di questo standard è diverso da quello previsto nella IEC 60945 quello contenuto in questa pubblicazione ha la precedenza.
Questa normativa si applica agli apparecchi radar ed ai sistemi di navigazione che hanno il compito di rivelare bersagli ed evitare collisioni. Tutte le apparecchiature che combinano queste attività e soddisfano i
requisiti di questo standard sono quindi da considerarsi secondo la normativa
sistemi radar.
L'utilizzo di altri sensori deve, ove possibile, rispettare i requisiti degli standard associati. Questo standard fornisce anche le linee guida e i requisiti di funzionalità su tutti i display di navigazione a sostegno delle attività di
target detection e collision avoidance.
L’integrazione dei radar con apparati AIS, cartografia elettronica, banche dati e altri sensori esige che l'apparecchiatura radar sia impostata correttamente, con particolare attenzione all'allineamento di headings, offset CCRP e giroscopio. Il mancato allineamento di questi parametri può provocare infatti ambiguità con altre informazioni e può pregiudicare l’integrazione dei sistemi.
Si passa ora a descrivere le varie specifiche richieste dalla normativa, con particolare attenzione alla sezione in cui vengono discusse i requisiti prestazionali degli apparati sotto esame.
2.4.1 Generalità
Al capitolo 4 della normativa viene elencata la documentazione che il produttore deve fornire all’ente certificatore, in particolare deve essere presente la definizione del contenuto del sistema e la tipologia di apparecchiatura sotto esame (EUT), una dichiarazione del produttore del tipo d’impiego (protected/exposed) e relativi interventi di preconditioning da effettuare prima dei test.
Seguono poi le linee guida per l’esecuzione dei test ambientali ed elettromagnetici la cui esecuzione è prevista in un laboratorio riconosciuto dall’ente certificatore con il supporto di personale competente in applicazioni radar. Nonostante molti test possano essere condotti a terra in un sito riconosciuto, alcuni test specifici devono essere effettuati over-sea, cioè su
utilizzare saranno descritti volta per volta mentre per le caratteristiche dei bersagli simulati si rimanda all’Annesso F.
La normativa poi dichiara espressamente che sia il dispositivo che la documentazione devono essere sviluppati e prodotti secondo procedure di qualità riconosciute (es. ISO 9000 o equivalenti).
Nella stesura del documento l’IEC ha ritenuto opportuno esplicare il significato della terminologia usata nella descrizione delle prove e dei risultati richiesti (par. 4.5.2) e soprattutto fornisce la spiegazione della terminologia per i metodi da utilizzare nei test secondo la ISO 9241-12. Vengono quindi previste come metodologie:
Observation: esame o ispezione dell'apparecchiatura per verificare che una particolare condizione osservabile è soddisfatta. Le osservazioni possono essere fatte da chiunque abbia l'abilità necessaria per controllare sistematicamente la presentazione delle informazioni;
Document inspection: conferma tramite ispezione documentale che le informazioni, strutture o funzioni sono conformi ai requisiti;
Measurement: misura o calcolo di una variabile relativa alla presentazione delle informazioni, della precisione o delle prestazioni;
Analytical evaluation: necessità dello studio di osservazioni o misure eseguito da parte di un esperto, una persona qualificata che ha le competenze necessarie e l'esperienza per giudicare la conformità ai requisiti.
2.4.2 Prestazioni radar
Il capitolo 5 dello standard entra in merito alle performance richieste all’apparato radar; è prevista la misurazione dello spettro di frequenza in trasmissione, la familiarizzazione con i comandi e con le funzioni di elaborazione dei segnali, seguita dalle misure di minimum range, risoluzione e accuratezza. La valutazione delle prestazioni in ambiente over-sea mira
alla valutazione delle prestazioni dell’elaborazione dei segnali e dei controlli di guadagno e anti-clutter.
2.4.2.1 Trasmissione e interferenze
La documentazione riporta il passo della risoluzione MSC.192/5.1.1 secondo il quale il radar deve trasmettere entro i limiti delle bande assegnate dall’ITU per i radar marittimi e soddisfare i requisiti dei regolamenti sulle trasmissioni radio e le raccomandazioni ITU-R applicabili, oltre ovviamente ad essere in grado di funzionare in modo soddisfacente in condizioni di interferenza tipiche dell’ambiente in cui viene usato, in questo caso quello marino.
A questo scopo la normativa cita in Annesso B la ITU-R
Recommendation M.1177 che stabilisce limiti e metodi di misura per le
emissioni fuori banda.
Nel caso specifico le emissioni spurie per i radar marini devono essere verificate nel range di frequenze riportato nella tabella seguente.
TABELLA 5. RANGE DI MISURA PER LE EMISSIONI SPURIE
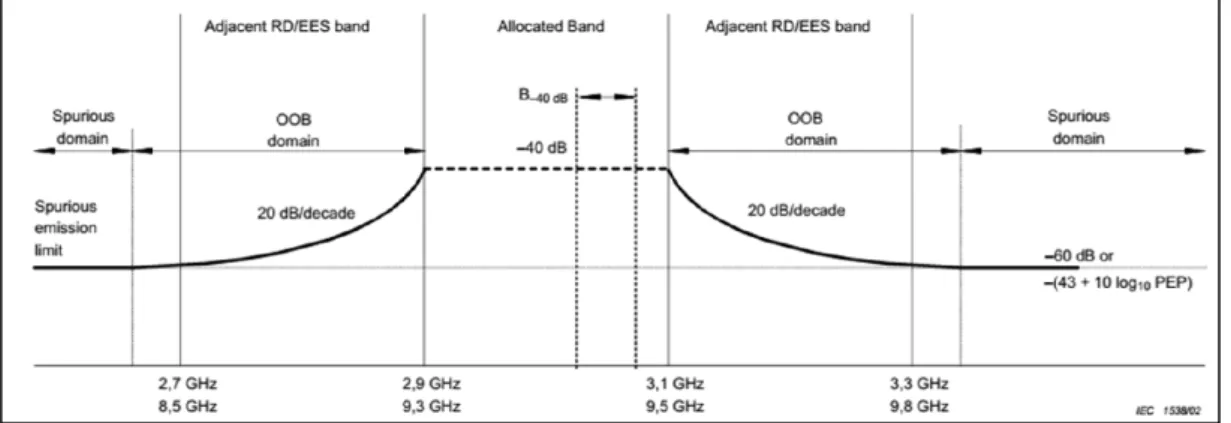
Questa pubblicazione rimanda poi per il calcolo della B-40 all’annesso
B della ITU-R SM.1541, definita come il minore tra: =
√ ∙
64
dove t è la durata dell’impulso (s), tr è il tempo di salita (s) e K è un coefficiente pari a 6.2 per i radar oltre i 100kW di potenza ovvero 7.6 nel caso di radar a bassa potenza.
La B-40 più grande al variare della lunghezza dell’impulso così
calcolata deve essere utilizzata per creare la maschera OOB da applicare a tale radar come nella maschera di esempio fornita con la pubblicazione.
FIGURA 3. MASCHERA EMISSIONI OUT-OF-BOUND
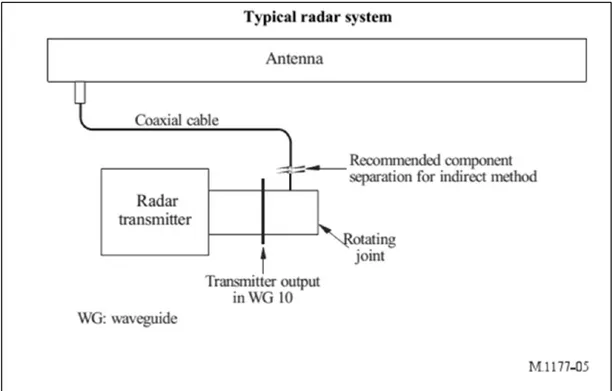
La ITU-R M.1177 mostra anche una tecnica di misura indiretta, la quale comprende una ricerca esplorativa della banda di frequenze di interesse per individuare e contrassegnare significative emissioni spurie, seguita dalla misura dettagliata ed accurata della massima ampiezza di tali emissioni.
La figura seguente illustra una separazione dei componenti consigliata per il metodo indiretto. In questo metodo indiretto le emissioni indesiderate sono valutate al giunto rotante e poi riviste in combinazione con le caratteristiche dell'antenna misurate separatamente a distanze di 5 m e 30 m con un'adeguata correzione di campo lontano.
FIGURA 4. CONFIGURAZIONE PER IL METODO INDIRETTO
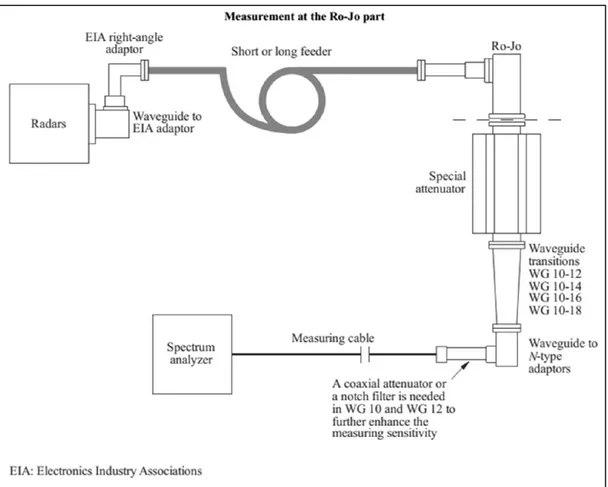
La prova comprende quindi:
misurazione delle emissioni al Ro-Jo con un feeder (come mostrato in Fig. 4.);
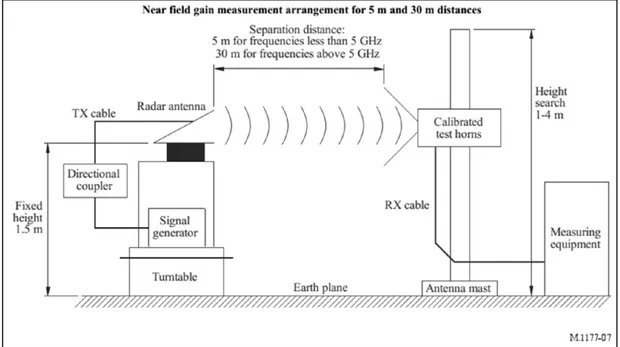
misurazione del guadagno massimo dell’antenna alle frequenze di emissione (effettuate a distanze di 5 m per frequenze inferiori a 5 GHz e 30 m per frequenze superiori a 5 GHz (vedi fig. 5);
correzione dei guadagni misurati con un fattore di correzione adeguato (utilizzando un programma software o il modello delle prestazioni dell'antenna. Nei casi più semplici può essere possibile utilizzare il programma software allegato alla pubblicazione);
combinazione dei risultati per ottenere la EIRP alle frequenze di emissione indesiderate.
FIGURA 5. MISURAZIONE DELLE EMISSIONI AL ROTATING JOINT
Questo sistema di misura permette la valutazione accurata di bassi livelli di emissioni in presenza di impulsi di alta potenza radar.
I componenti principali del sistema sono un filtro notch e un insieme di guide d'onda coniche, da WG10 a dimensioni minori, per coprire l'intera gamma di frequenze di interesse. Il filtro notch comprende una guida d'onda retta WG 10 con elementi assorbenti interni, che attenua il segnale fondamentale, mentre alle altre frequenze offre attenuazione trascurabile. All'uscita del filtro notch sono usati coni per ottenere l'attenuazione necessaria per proteggere le apparecchiature e misurare le emissioni a frequenze più elevate. Il cono è un filtro passa-alto e quindi respinge i segnali al di sotto della frequenza di taglio. Se una conicità fosse stata usata direttamente in una porta di uscita di un trasmettitore radar la frequenza fondamentale sarebbe stata riflessa verso il trasmettitore. Con il cono posizionato dopo il filtro notch i segnali riflessi sono assorbiti una seconda
volta, pertanto la perdita alla frequenza fondamentale è tipicamente di 34dB, sufficientemente bassa da evitare danni al magnetron. Le frequenze al di sopra del cut-off sono trasmesse attraverso le transizioni verso la strumentazione di misura. Se possibile dovrebbe essere inclusa una sezione di guida d'onda corta per evitare l'accoppiamento dei modi evanescenti tra un cono e una guida d'onda di transizione.
Questo metodo indiretto richiede che le misure di campo vicino dell’antenna siano effettuate in un sito di prova all’aperto, ad una distanza di 5 m per la frequenza al di sotto di 5 GHz ed a 30 m per le frequenze superiori. Vengono poi applicati fattori di correzione per ottenere la misura per un guadagno equivalente in campo lontano.
FIGURA 6. SCHEMA PER MISURA GUADAGNO D’ANTENNA
La misura di guadagno massimo deve essere effettuata alle frequenze spurie e le emissioni OOB misurate o identificate utilizzando il metodo specificato sopra; per ciascuna frequenza di emissione misurata o identificata il guadagno di AUT11 deve essere massimizzato prima su una
rotazione di 360° e poi spostando il feeder in alto o in basso. Il guadagno è ottenuto misurando l’EIRP12 nota la potenza alle frequenze individuate.
La tecnica utilizzata per ottenere un valore EIRP massimo è aggiungere, per ogni frequenza di emissione, la potenza massima generata dal trasmettitore radar (dBm) al massimo guadagno direzionale (dBi) dell’AUT. Questo significa che si deve caratterizzare l’AUT solo alle frequenze in cui si hanno emissioni spurie.
Il metodo indiretto è abbastanza sensibile per consentire la misurazione dei bassi livelli di emissione con una ragionevole precisione e ripetibilità. Inoltre può essere utilizzato in tutte le condizioni atmosferiche e la gamma di frequenza di misura può essere facilmente estesa a 40 GHz ed oltre.
2.4.2.2 Monitoraggio, funzioni di guadagno e anti-clutter, signal processing
Lo standard richiede la presenza di funzionalità e indicatori per ottimizzare le prestazioni ed individuare un calo significativo delle prestazioni, come richiesto dalla MSC.192.
Il sistema deve quindi fornire indicazione del suo stato di funzionamento con prestazioni ottimali così come devono esserci indicazioni di un eventuale calo significativo delle prestazioni del sistema rispetto allo standard stabilito al momento dell'installazione.
Per quanto possibile l’apparato deve avere funzionalità per la riduzione adeguata di echi indesiderati, come clutter di mare, di pioggia, nuvole, tempeste di sabbia e le interferenze provenienti da altri radar.
Sul fronte del signal processing sono previste invece funzioni di elaborazione dei segnali per migliorare la visibilità dei target e le prestazioni di rilevamento; la normativa prevede la verifica dei sistemi di target
12 Equivalent Isotropic Radiated Power
enhancement, radar signal correlation13, la misura dei tempi di latenza del signal processing e della rappresentazione delle immagini, la presenza di metodi di soppressione degli echi di seconda traccia e la possibilità di cambiare tipo di impulso a seconda delle condizioni ambientali.
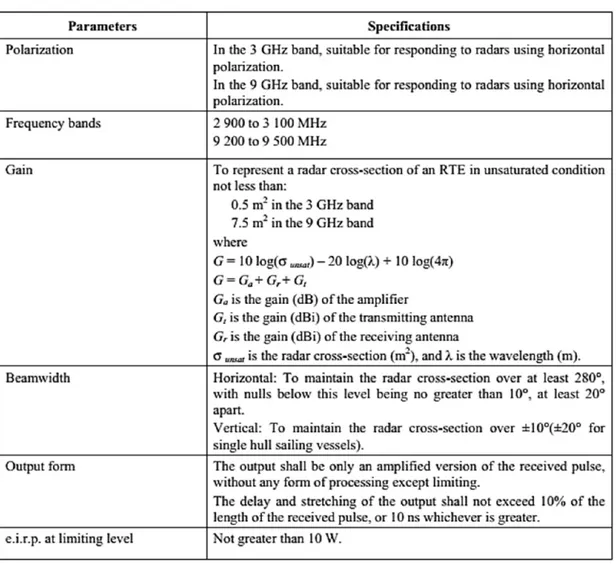
2.4.2.3 SARTs, RTEs e radar enhancers
Secondo il paragrafo 5.6 della IEC 62388 i sistemi radar in banda X devono essere compatibili con i radiofari, i SART14 ed i radar target enhancers (RTE), mentre i sistemi radar in banda S possono adottare nuove
tecnologie che potrebbero non essere compatibili con questi ausili alla navigazione. Deve essere comunque garantita la possibilità di non visualizzare questi segnali sul display insieme all’indicazione dello stato della funzionalità.
In questa parte si richiama alle normative ITU-R M.824-3 per le caratteristiche dei radiofari, alla M.628-4 per i SART ed alla M.1176 per gli RTE, di cui si riportano di seguito le tabelle estratte.
TABELLA 7. CARATTERISTICHE PER RADAR TARGET ENHANCERS - M.1176
2.4.2.4 Range minimo e compensazione
Lo standard stabilisce inoltre le minime distanze a cui devono essere rivelati gli elementi presenti nello scenario, dopo comunque aver compensato gli errori in distanza che possono verificarsi, specialmente nel caso di radar con più antenne.
Descrive poi la procedura per verificare che i requisiti di rivelazione in termini di distanza minima siano soddisfatti; questa consiste nel rivelare, con
angolo con RCS di 5 m2 in banda X ovvero 0,5 m2 in banda S) in un intervallo
orizzontale di almeno 40 m dalla posizione dell'antenna e fino ad una distanza di 1 miglio nautico, senza cambiare l'impostazione delle funzioni di controllo salvo la scala della rappresentazione.
2.4.2.5 Risoluzione e accuratezza in range e bearing
La documentazione IEC 62388 richiede di effettuare misurazioni di risoluzione in range e bearing in ben precise condizioni: mare calmo, quindi clutter minimo, e una bersagli posizionati tra il 50% ed il 100% del range scale in uso al momento, ma comunque non superiore a 1,5 nm.
Per quanto riguarda invece l’accuratezza delle misurazioni la normativa richiede di testare le prestazioni del radar comparando i dati di target in posizioni note (es. usando un ricevitore GPS) con quelli forniti dall’apparato e determinando poi lo scarto tra le due misure.
La specifica richiede una risoluzione in range di 40m (o meno) e in bearing di 2,5° al massimo, mentre in accuratezza richiede una precisione in distanza di 30m o l’1% del range scale in uso, quale sia il minimo, mentre in bearing richiede una precisione di 1°.
Per queste prove si è provveduto a stilare le schede di sintesi per la loro esecuzione, riportandole poi di seguito, ed applicando la procedura di misura dell’accuratezza in sede sperimentale.
PROVA DI RISOLUZIONE IN DISTANZA
(paragrafo 5.8.3 IEC 62388)
Scheda descrittiva della prova
TITOLO Verifica della risoluzione in distanza
SCOPO Verificare la discriminazione in distanza del radar e con bersagli di eguale RCS.
CONFIGURAZIONE RADAR
Banda X – Range scale 0,75 NM
Short pulse (minimo disponibile) – Rain control OFF
TARGET
Numero: [ 2 ];
Tipo: [Mezzo Navale
Minore + Corner Reflector] RCS: [ 10 m2] MODELLO DI SW: [ 1 ] MEZZI RICHIESTI 1. Numero 2 target equipaggiati di corner reflector a 3 m s.l.m.; 2. GPS a bordo di ciascuno; 3. GPS su sito terrestre in posizione geografica nota con precisione; DATI DA REGISTRARE
1. Dati plot radar per mezzo di sistema di registrazione se disponibile sul radar, ovvero manuale tramite operatore. 2. Dati GPS della MCN.
CRITERI DI
VALIDITA’ DELLA PROVA
La prova è da considerarsi valida se le imbarcazioni vengono rivelate e separate per almeno 8 scansioni su 10.
TOLLERANZA DEI MEZZI
N.A.
PROCEDURA PER L’ESECUZIONE
a. Entrambe le imbarcazioni si posizionano sullo stesso azimut rispetto al radar;
b. Mentre una delle due imbarcazioni (a) si mantiene ferma nella posizione iniziale, l’altra (b) si avvicina (in range) alla prima fino ad una distanza inferiore ai 40 m;
c. Vengono registrati i dati plot radar e GPS mentre
l’imbarcazione b permane ad una distanza inferiore ai 40 m dall’imbarcazione a;
DESCRIZIONE DELLA MISSIONE
IMBARCAZIONE a
L’imbarcazione mantiene la posizione durante tutta la durata della prova
Distanza iniziale: R2 = [ 0,5 NM];
Distanza tra le imbarcazioni d = [≤ 40 m] IMBARCAZIONE b L’imbarcazione esegue un avvicinamento rispetto all’imbarcazione a Tratto in avvicinamento Distanza iniziale: R1 = [ 0,3 NM]; Distanza finale: R2 = [ 0,48 NM]; Velocità: v = lento moto;
PIANO ORIZZONTALE DELLA MISSIONE NOTE N.N. R2 MCN a R1 MCN b d
PROVA DI RISOLUZIONE IN AZIMUT
(paragrafo 5.8.4 IEC 62388)
Scheda descrittiva della prova
TITOLO Verifica della risoluzione in azimut
SCOPO Verificare la discriminazione in azimut del radar e con bersagli di eguale RCS.
CONFIGURAZIONE RADAR
Banda X – Range scale 0,75 Nm (consentito fino a 1,5 Nm) Short pulse (minimo disponibile) – Rain control OFF
TARGET
Numero: [ 2 ];
Tipo: [Mezzo Navale Minore + Corner Reflector] RCS: [ 10 m2] MODELLO DI SW: [ 1 ] MEZZI RICHIESTI 1. Numero 2 target equipaggiati di corner reflector a 3 m s.l.m.; 2. GPS a bordo di ciascuno; 3. GPS su sito terrestre in posizione geografica nota con precisione; DATI DA REGISTRARE
1. Dati plot radar per mezzo di sistema di registrazione se disponibile sul radar, ovvero manuale tramite operatore. 2. Dati GPS della MCN.
CRITERI DI
VALIDITA’ DELLA PROVA
La prova è da considerarsi valida se le imbarcazioni vengono rivelate e separate per almeno 8 scansioni su 10.
TOLLERANZA DEI MEZZI
N.A.
PROCEDURA PER L’ESECUZIONE
a. Entrambe le imbarcazioni si posizionano alla stessa distanza rispetto al radar;
b. Mentre una delle due imbarcazioni si mantiene ferma, l’altra si avvicina (in azimut) alla prima fino ad una distanza tale per cui viene ancora rivelata separatamente dalla prima;
c. Vengono registrati i dati plot radar e GPS mentre l’imbarcazione b si avvicina all’imbarcazione a;
DESCRIZIONE DELLA MISSIONE
IMBARCAZIONE a
L’imbarcazione mantiene la posizione durante tutta la durata della prova
Posizione iniziale: R = [ 0,6 NM ] ovvero 60% del range scale in uso. IMBARCAZIONE b L’imbarcazione esegue un avvicinamento rispetto all’imbarcazione a Tratto in avvicinamento Posizione iniziale: R = [ 0,6 NM ] ovvero 60% del range scale in uso;
Distanza iniziale tra le imbarcazioni dmax = [ 30 m];
Distanza finale tra le imbarcazioni dmin = [ <5 m];
Velocità: v = lento moto;
PIANO
ORIZZONTALE DELLA MISSIONE
NOTE
I dati acquisiti saranno poi integrati da un plot del display del radar e dalle coordinate GPS delle imbarcazioni nell’ultimo istante in cui vengono rivelate separatamente.
MCN a MCN b
dmin
PROVA DI ACCURATEZZA
(paragrafo 5.8.5 IEC 62388)
Scheda descrittiva della prova
TITOLO Verifica della accuratezza radar.
SCOPO Ottenere la misura della accuratezza del radar.
CONFIGURAZIONE RADAR
Banda X.
Condizioni operative ed ambientali tipiche.
TARGET Numero: [ 2 ]; Tipo: [ Mezzo navale minore ] RCS: [ 10 m2] SW: [ 1 ] MEZZI RICHIESTI
1. Numero due target; 2. GPS differenziale a bordo delle MCN; 3. GPS su sito terrestre in posizione geografica nota con precisione. DATI DA REGISTRARE
1. Dati plot radar per mezzo di sistema di registrazione se disponibile sul radar, ovvero manuale tramite operatore.
2. Dati GPS della MCN.
3. Eventuali dati di target occasionali (tramite AIS o altri radar).
CRITERI DI
VALIDITA’ DELLA PROVA
La prova è da considerarsi valida se i bersagli utilizzati sono distribuiti ad una distanza compresa tra l’80% ed il 100% del range scale in uso.
TOLLERANZA DEI MEZZI
N.A.
PROCEDURA PER L’ESECUZIONE
a. I bersaglio si posizionano rispettivamente ad una distanza pari ad 1NM ed a 10 NM;
b. Contemporaneamente vengono registrati i dati plot radar ed i dati GPS;
c. Vengono calcolati le distanza e gli azimut dei target in base ai dati GPS e confrontati con le distanze e gli azimut riportati dal radar.
VALORI ATTESI
E’ attesa una accuratezza della misurazione in distanza entro i 30 m o l’1% del range scale, quale sia il maggiore; è inoltre
DESCRIZIONE DELLA MISSIONE
IMBARCAZIONE a
L’imbarcazione mantiene la posizione durante tutta la durata della prova
Posizione iniziale: R1 = [ 10 NM ]
IMBARCAZIONE b
L’imbarcazione mantiene la posizione durante tutta la durata della prova
Posizione iniziale: R2 = [ 1 NM ] PIANO ORIZZONTALE DELLA MISSIONE MCN a MCN b
NOTE Può essere anche usata una sola imbarcazione ripetendo la
prova a 1NM e a 10 NM
R1 [10NM]
2.4.2.6 Valutazione delle prestazioni
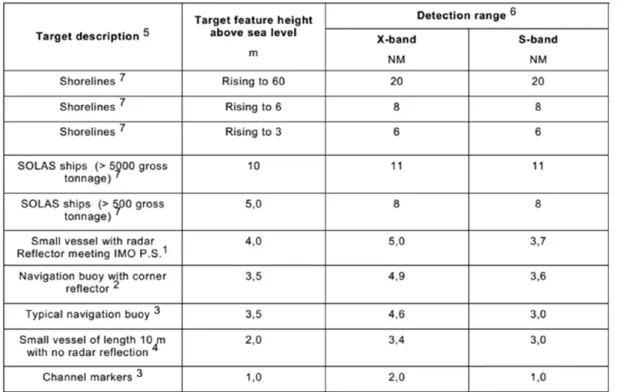
Lo standard specifica la distanza minima di prima rivelazione in condizioni ottimali e definisce le condizioni di clutter in cui testare, misurare e valutare il rispetto dei requisiti; in particolare definisce la distanza di prima rilevazione in condizioni di clutter minimo, la distanza (o previsione di distanza) di prima rilevazione in presenza di clutter (tra l'antenna e il bersaglio) e la valutazione della visibilità del bersaglio in presenza di clutter osservando bersagli di prova usando stati del mare e pioggia secondo opportunità.
Per quanto riguarda la prima rivelazione in assenza di clutter prefissa come requisiti quelli riportati in Tabella 2 della normativa (qui sotto riportata come tabella 8); è interessante notare come lo standard non imponga la durata dell’impulso, ma solo l’uso dell’antenna più piccola in dotazione all’apparato.
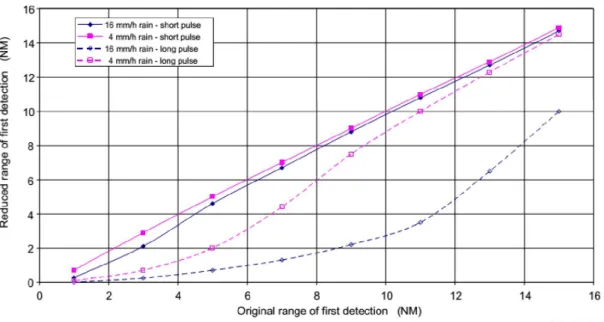
deve essere chiaramente indicato nel manuale utente in riferimento alle seguenti condizioni di pioggia leggera (4 mm/h) e pioggia intensa (16 mm/h), stato del mare 2 e 5, e la combinazione di queste condizioni. Permette inoltre al produttore di sottoporre all’ente certificatore documentazione riguardo le prestazioni in queste condizioni ambientali, in modo da poter valutare il rispetto degli standard.
La normativa esplica quindi il fenomeno del rain clutter descrivendolo come causa di un elevato ritorno di segnale, simile a rumore, che diminuisce notevolmente il rapporto segnale-rumore (SNR) al ricevitore radar, oltre ad introdurre una attenuazione del segnale radar. La valutazione del degrado deve essere fatta alla luce del calo delle prestazioni previsto dai grafici inseriti nella normativa, di cui si riporta quella relativo a radar operanti in banda X.
FIGURA 7. RIDUZIONE DELLA DISTANZA DI PRIMA RIVELAZIONE IN PRESENZA DI PIOGGIA
Lo standard poi esamina i requisiti di prestazioni in presenza di clutter di mare, prevedendo l’utilizzo di target del tipo Luneberg lens reflector omnidirezionale sul piano orizzontale con RCS di 1, 5 e 10 m² in banda X posizionati a 0.7nm (per la banda S con RCS 0.1, 0.5 e 1 m² a 0.4nm). Resta comunque valida l’ipotesi di non eseguire questi test se il produttore ha fornito sufficienti prove di performance in condizioni meteo marine simili, ma
è comunque obbligatoria la valutazione di questi dati da parte di un esperto per confermare la validità delle prove.
2.4.2.7 Antenna radar
La IEC 62388 stabilisce poi anche i requisiti da soddisfare per quanto concerne le antenne utilizzate: le prestazioni non devono essere considerevolmente ridotte se la nave presenta rollio o beccheggio fino a 10°. Ciò viene appurato determinando i diagrammi di irradiazione delle antenne in dotazione, procedura che serve anche a verificare il rispetto dei requisiti richiesti in termini di larghezza del fascio e di livello dei lobi laterali, riportati nella normativa in apposite tabelle.
TABELLA 9. LIMITI DI LARGHEZZA DEL LOBO PRINCIPALE
TABELLA 10. LIMITI PER I LOBI LATERALI
2.4.3 Altri requisiti
La normativa prevede poi una serie di parametri e requisiti da rispettare poiché dettati dalle norme IMO riguardo l’armonizzazione della
Si ha perciò nella normativa un intero capitolo relativo alla presentazione delle informazioni sul display radar (Capitolo 6 – Display
presentation – con riferimento alla Risoluzione MSC.191(79) ), uno sulla
coerenza delle informazioni rispetto ad uno specifico punto inteso come riferimento comune per qualsiasi dato (Capitolo 7 – CCRP15 and own ship) e uno sugli strumenti utili alla navigazione (Capitolo 8 – Navigation tools) che devono essere sincronizzati e armonizzati nella presentazione dei dati.
Seguono poi i requisiti per i dispositivi che forniscono informazioni di orientamento, movimento e stabilizzazione (Capitolo 9 – Orientation, motion
and stabilisation), le normative per le funzionalità deputate ad evitare
collisioni e per la cartografia elettronica (Capitoli 10 e 11).
Lo standard prevede poi i criteri di ergonomia per quanto riguarda la disposizione di comandi e funzioni (Capitolo 12 – Ergonomic criteria – con riferimento alla IEC 60945) e i requisiti di standardizzazione per le interfacce (Capitolo 13 – Interfacing).
Il capitolo 14 dello standard riporta poi i requisiti di progettazione, manutenzione e installazione, oltre ad un paragrafo dedicato ai livelli di emissione da non superare; viene stabilito che l’antenna più grande in dotazione deve essere sottoposta ad un test in galleria del vento con velocità del flusso di 100 nodi e deve comunque continuare ad operare con velocità di rotazione non inferiore a 20 rpm. Devono essere inoltre specificate nel manuale le distanze a cui si ha un’emissione di 10, 50 e 100 W/m2 da
controllare comunque tramite verifica sperimentale.
La pubblicazione si conclude con i capitoli dedicati alla regolamentazione delle indicazioni degli allarmi (Capitolo 15 – Alarms and
failures), ai test di resistenza a corrosione, vibrazioni e temperature elevate
(Capitolo 16 – Environmental testing) ed alla presenza di istruzioni d’uso e
15 Consistent Common Reference Point, un punto di riferimento sulla nave a cui si
riferiscono tutte le misure orizzontali, ad esempio distanza, rilevamento, rotta relativa, velocità relativa, punto di massimo avvicinamento (CPA) o il tempo al punto di massimo avvicinamento (TCPA).
modalità addestrative e/o simulative (Capitolo 17 – Equipment familiarisation
and documentation).
2.4.4 Tabelle sintetiche dei requisiti
Le tabelle riportate in appendice A sono stilate riportando rispettivamente: paragrafo IEC 62388, titolo del paragrafo, tipo di prova richiesta (Observation, Document inspection, Measurement, analytical Evaluation – vedi par.2.4.1), eventuali note o condizioni richieste.
2.4.5 Strumentazione e facilities necessarie
Come base di riferimento si sono cercati gli strumenti adatti a soddisfare i livelli prescritti dalle norme per ogni prova selezionata. Le Direttive Europee non descrivono le caratteristiche della strumentazione da impiegare, ma richiedono di generare il report delle prove eseguite con le evidenze dei risultati.
Analizzando la IEC 62388 si è potuto così stilare un elenco delle attrezzature necessarie ad eseguire i test, nell’ottica di un’acquisizione delle stesse per poter quindi installare un ipotetico laboratorio riconosciuto.
Si è voluto suddividere la strumentazione necessaria rispetto all’ambiente in cui vengono eseguiti i test, infatti per alcuni di essi non è necessario che l’apparato sia fisicamente montato, calibrato e in emissione, in quanto per eseguire prove relative a guasti o modalità di visualizzazione dei dati non è obbligatorio operare in uno scenario reale; proprio per questa ragione si esporrà prima l’elenco delle attrezzature necessarie per la verifica dei requisiti in laboratorio e poi si procederà ad elencare le attrezzature necessarie per le prove di performance da eseguire con l’apparato installato su una nave o comunque su piattaforma vicina al mare.
Consiste in un dispositivo in grado di generare i segnali che vengono normalmente ricevuti dall'antenna radar. I segnali si collegano a un normale display radar permettendo ai controlli di lavorare come nella realtà. È presente la possibilità di introdurre diversi scenari, tra cui bersagli multipli, radiofari e le interferenze da altri radar o dovute al clutter.
GPS Positioning System
È un dispositivo necessario ai fini del rilevamento della posizione dell’apparato e dei bersagli di test, oltre a fornire dati al radar simulator.
Simulatore di segnali da giroscopio e bussola
Questa apparecchiatura serve a simulare il funzionamento del giroscopio e produrre segnali normalmente generati dalla girobussola.
Heading repeater
Dispositivo atto a riportare il segnale di direzione (vero o simulato).
Gyro converter
Questo elemento è destinato a convertire i segnali provenienti dalla girobussola (o dal suo simulatore) nel formato NMEA 0183, ripreso dalle norme IEC 61162, per poter essere utilizzato da strumentazione complessa come VDR o AIS.
Cronometro
Ovviamente tutta la strumentazione deve avere la predisposizione a fornire tramite un’interfaccia in output i dati acquisiti o processati, in modo che la loro registrazione venga allegata come risultati delle prove effettuate.
2.4.5.2 Misurazioni sul campo
Misuratore di campi elettromagnetici e relativa sonda Misuratore laser per distanze
Luneberg lens reflector con RCS in m2 1, 5, 10 in banda X, 0.1, 0.5, 1
in banda S
Il riflettore Luneberg dà una risposta omogenea all'interno di un angolo molto ampio. Si tratta di un risponditore passivo ideale, perfetto per evidenziare, ed eventualmente monitorare il target radar a cui è collegato, con un elevato livello di sicurezza. Il Luneberg è il più efficiente riflettore radar passivo disponibile e non richiede alimentazione né manutenzione.
È costituito da una lente di Luneberg con parti della superficie metallizzate La radiazione proveniente da un trasmettitore radar è focalizzata sulla parte inferiore della metallizzazione sul lato opposto, viene riflessa e si concentra di nuovo verso il radar.
Corner reflector con RCS in m2 1, 5, 10 in banda X, 0.1, 0.5, 1 in
banda S.
2.4.5.3 Esecuzione di test presso altri enti
La normativa non richiede esplicitamente che i test vengano svolti dal laboratorio riconosciuto, ma consente, visti anche alcuni requisiti di difficile verifica, di svolgere le prove presso altri enti, istituti o laboratori. Ad esempio le prove relative a colori, luminanza, luminosità in varie condizioni ed altre misure relative anche alla grafica possono essere eseguite da laboratori specializzati con la condizione che rilascino un report da allegare alla documentazione per l’ente certificatore.
Allo stesso modo le prove in galleria del vento, necessarie per i requisiti di resistenza dell’antenna possono essere svolte presso altre strutture, sempre con l’obbligo di rilascio della documentazione riguardante l’esito dei test. A tal proposito in Italia sono presenti tre gallerie del vento per uso civile e ambientale: la prima, realizzata a Prato dal CRIACIV, ha medie dimensioni; la seconda, realizzata a Milano dal CIRIVE al Politecnico, è la più
Prato e Milano: in questo modo contribuisce a realizzare una rete di laboratori, ciascuno dotato di caratteristiche sue peculiari.