CAPITOLO QUARTO
La normativa relativa alla geometria stradale
4.1 Classificazione delle strade
Conformemente a quanto previsto all’art.2 del “Codice della strada” (D. L.vo 285/92 e suoi aggiornamenti successivi) le strade sono classificate, riguardo alle loro caratteristiche costruttive, tecniche e funzionali, nei seguenti tipi:
A- Autostrade (extraurbane e urbane) B- Strade extraurbane principali C- Strade extraurbane secondarie D- Strade urbane di scorrimento E- Strade urbane di quartiere
F- Strade locali (extraurbane e urbane)
Ad ogni categoria di strada è associata una propria geometria ed un proprio intervallo di velocità di progetto.
4.2 Scelta del tipo di strada
Nel presente studio è stata scelta una strada di categoria C (più precisamente C1), dal Km 105 fino alla attraversamento del fiume Cecina intorno al Km 108, costituita da due corsie, una per senso di marcia, di 3,75 m ciascuna e da banchine di 1,50 m (Figura 4.1).
L’intervallo della velocità di progetto associato a questa strada è compreso tra 60 e 100 km/h.
Mentre dal Km 108 al Km 135 ultimo chilometro di studio è stata scelta una strada di categoria F (più precisamente F1), questo perché questo tratto rispetto al precendente è più collinare.
L’intervallo della velocità di progetto associato a questa strada è compreso tra 40 e 100 km/h.
Vedi le due figure nelle pagine seguenti la prima riferita alla sezione stradale di categoria C è la:
Figura 4.1– Configurazione della piattaforma C secondo le Norme CNR
La seconda riferita alla sezione stradale di categoria F è la :
4.3 Distanze di visibilità
L’esistenza di opportune visuali libere costituisce primaria ed inderogabile condizione di sicurezza della circolazione.
Per distanza di visuale libera si intende la lunghezza del tratto di strada che il conducente riesce a vedere davanti a sé senza considerare l’influenza del traffico, delle condizioni atmosferiche e di illuminazione della strada. Lungo il tracciato stradale la distanza di visuale libera deve essere confrontata, in fase di progettazione, con le seguenti distanze:
• Distanza di visibilità per l’arresto: è pari allo spazio minimo
necessario perché un conducente possa arrestare il veicolo in condizione di sicurezza davanti ad un ostacolo imprevisto. Tale distanza è data dalla somma dello spazio di frenatura S e dello spazio percorso alla velocità V iniziale durante il tempo τ detto “tempo complessivo di reazione” che è necessario al conducente per percepire la presenza dell’ostacolo e per mettere in azione i freni. Per il tempo complessivo di reazione si assumono valori linearmente decrescenti con la velocità da 2,6 s per 20 km/h, a 1,4 s per 140 km/h, in considerazione dell’attenzione più concentrata alle alte velocità.
dove:
D1 = spazio percorso nel tempo τ (m)
D2 = spazio di frenatura (m)
V0 = velocità del veicolo all’inizio della frenatura (km/h)
V1 = velocità finale del veicolo, in cui V1= 0 in caso di arresto (km/h)
i = pendenza longitudinale del tracciato (%)
τ = tempo complessivo di razione (s)
g = accelerazione di gravità (m/s2) Ra = resistenza aerodinamica (N)
m = massa del veicolo (Kg)
fl = quota limite del coefficiente di aderenza impegnabile
longitudinalmente per la frenatura
r0= resistenza unitaria al rotolamento, trascurabile (N/kg)
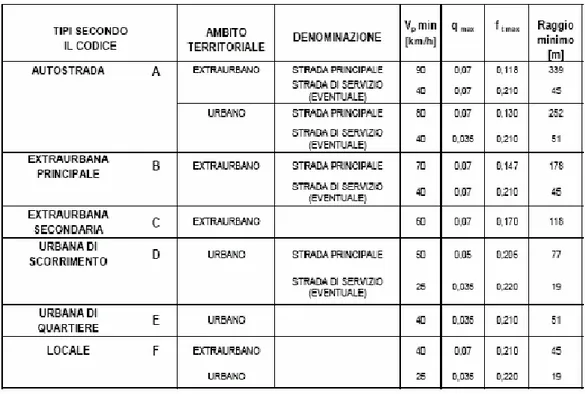
Con riferimento ad un’autovettura media:
Tabella 4.1 – Coefficienti di aderenza longitudinale proposti dalle Norme CNR
Sfruttando i dati in tabella è stato possibile individuare una linea di tendenza che rappresentasse fedelmente l’andamento di fl. L’equazione di
• Distanza di visibilità per il sorpasso [m]: è pari alla lunghezza
del tratto di strada occorrente per compiere una manovra di completo sorpasso in sicurezza, quando non si possa escludere l’arrivo di un veicolo in senso opposto. In presenza di veicoli marcianti in senso opposto la distanza di visibilità completa per il sorpasso si valuta con la seguente espressione:
dove:
v (m/s) oppure V (km/h) è la velocità di progetto desunta puntualmente dal diagramma della velocità ed attribuita uguale sia per il veicolo sorpassante che per il veicolo proveniente dal senso opposto.
• Distanza di visibilità per il cambiamento di corsia [m]: è pari
alla lunghezza del tratto di strada occorrente per il passaggio da una corsia a quella ad essa adiacente nella manovra di deviazione in corrispondenza di punti singolari (intersezioni, uscite, ecc). Lo spazio necessario si valuta con la seguente espressione:
v (m/s) oppure V (km/h) è la velocità del veicolo desunta puntualmente dal diagramma delle velocità.
Le distanze di visibilità da verificare dipendono dal tipo di strada in progetto e dall’elemento di tracciato considerato. Indipendentemente però dal tipo di strada e dall’ambito (extraurbano o urbano), lungo tutto il tracciato deve essere assicurata la distanza di visibilità per l’arresto in condizioni ordinarie o con tempi di reazione maggiorati. Nelle strade extraurbane ad unica carreggiata con doppio senso di marcia (come il tipo C e F), la distanza di visibilità per il sorpasso deve essere garantita per una conveniente percentuale di tracciato, in misura comunque non inferiore al 20%. Nei tratti di carenza di visibilità per il sorpasso, tale manovra deve essere interdetta con apposita segnaletica. Ai fini delle verifiche delle visuali libere, la posizione del conducente deve essere sempre considerata al centro della corsia da lui impegnata, con l’altezza del suo occhio a m. 1,10 dal piano viabile. Nella valutazione della distanza di visibilità per l’arresto, l’ostacolo va collocato a m. 0,10 dal piano viabile e sempre lungo l’asse della corsia del conducente. Nel caso della distanza di visibilità per il sorpasso, l’ostacolo mobile va collocato nella corsia opposta, con altezza pari a m. 1,10. Nel caso della manovra di cambiamento di corsia, deve essere verificata la possibilità di vedere il limite più lontano della corsia adiacente a quella impegnata dal conducente.
4.4 Andamento planimetrico dell’asse
4.4.1 Curve circolari
Nel progetto sono state utilizzate curve circolari aventi raggi e sviluppi tali da rispettare le regole indicate dalla Normativa, secondo cui:
• Una curva circolare, per essere correttamente percepita, deve avere uno sviluppo corrispondente ad un tempo di percorrenza di almeno 2,5 secondi valutato con riferimento alla velocità di progetto della curva. In qualche caso questa regola non è stata soddisfatta;
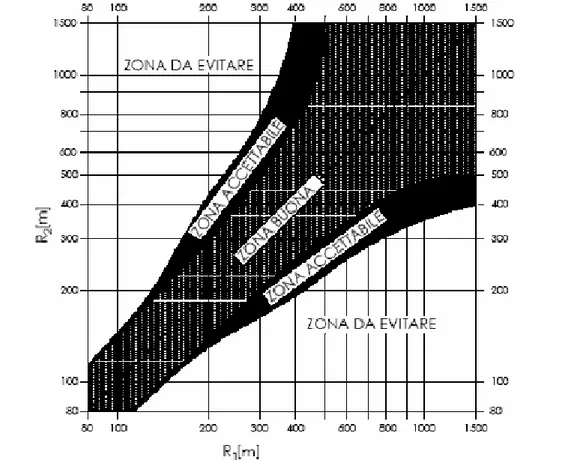
• I rapporti tra i raggi R1 e R2 di due curve circolari successive deve
essere regolato dall’abaco di Figura 6, tenendo conto che per le strada di tipo C e F è utilizzabile pure la “zona accettabile”;
• Tra un rettifilo di lunghezza LR ed il raggio più piccolo fra quelli
delle due curve collegate al rettifilo stesso, anche con l’interposizione di una curva a raggio variabile, deve essere rispettata la condizione:
R > LR per LR < 300m
Figura 4.3 – Rapporti tra i raggi di due curve circolari consecutive
Il raggio minimo delle curve circolari si determina dallo studio dell’equilibrio di un veicolo transitante su una curva circolare; i valori ottenuti sono esposti in Tabella 4.2. Per normativa, al raggio minimo è associata la pendenza trasversale massima q MAX che per le strada di tipo
C è del 7% mentre per quella di tipo F del 10%. In rettilineo o nelle curve a grandissimo raggio la carreggiata stradale è composta da due falde aventi pendenza trasversale del 2,5%.
Tabella 4.2 – Valori dei raggi minimi per le varie categorie di strade
Per valutare la velocità e/o la pendenza delle curve circolari con raggi maggiori del minimo si può utilizzare l’abaco di Figura 4.4.
4.4.2 Rettifili
La lunghezza massima dei rettifili è stata mantenuta, lungo tutto il tracciato, inferiore al valore LR= 22*Vpmax (m) dove Vpmax è il limite
superiore dell’intervallo di velocità di progetto della strada, in km/h. Questo limite risponde alla necessità di evitare il superamento delle velocità consentite, la monotonia, la difficile valutazione delle distanze e di ridurre l’abbagliamento nella guida notturna. Di contro un rettifilo, per poter essere percepito come tale dall’utente, deve avere una lunghezza non inferiore ai valori riportati nella Tabella 4.3; per velocità si intende la massima desunta dal diagramma di velocità per il rettifilo considerato.
Tabella 4.3 – Lunghezze minime dei rettifili, CNR
Nel progetto realizzato sono stati inseriti più rettifili, onde agevolare i sorpassi e favorire una più alta velocità commerciale. Sono stati rispettati i limiti prima elencati con particolare attenzione nei riguardi della lunghezza massima; difatti tutti i rettifili introdotti hanno lunghezze abbondantemente minori del limite.
4.4.3 Curve a raggio variabile
Tra due curve circolari e tra curva circolare e rettifilo, devono essere inserite curve a raggio variabile. Queste curve sono progettate in modo da garantire:
• Una variazione di accelerazione centrifuga non compensata (contraccolpo) contenuta entro valori accettabili;
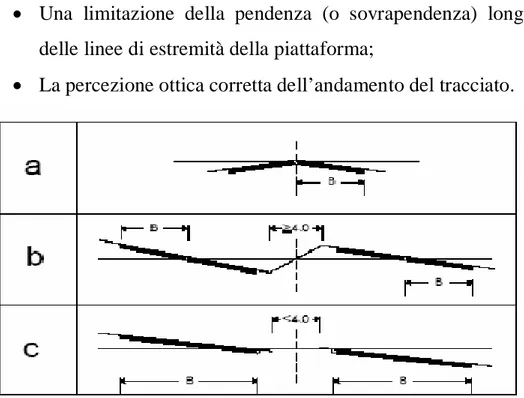
• Una limitazione della pendenza (o sovrapendenza) longitudinale delle linee di estremità della piattaforma;
• La percezione ottica corretta dell’andamento del tracciato.
Figura 4.5 – Modi di rotazione della carreggiata
Lungo le curve a raggio variabile, si realizza il graduale passaggio della pendenza trasversale dal valore proprio di un elemento a quello relativo al
Questo passaggio si ottiene facendo ruotare la carreggiata stradale, o parte di essa, secondo i casi, intorno al suo asse ovvero intorno alla sua estremità interna. E’ preferibile che tale asse sia quello della carreggiata perché ciò comporta un sollevamento minore del bordo esterno della piattaforma.
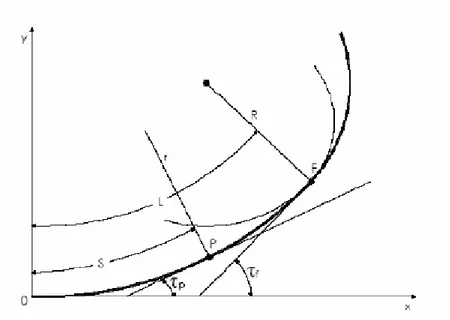
La curva a raggio variabile impiegata è la clotoide, avente equazione:
dove:
r = raggio di curvatura nel punto P generico s = ascissa curvilinea nel punto P generico A = parametro di scala
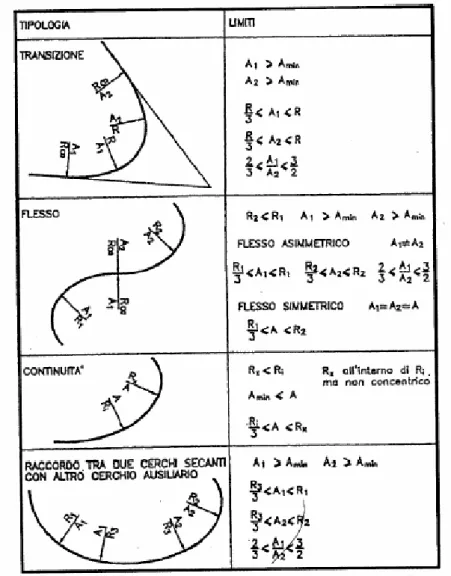
Le quattro tipologie dei raccordi clotoidici sono rappresentate in Figura 4.7. che si trova nella pagina seguente.
4.4.4 Calcolo degli elementi di una clotoide
CLOTOIDE RETTIFILO – CURVA
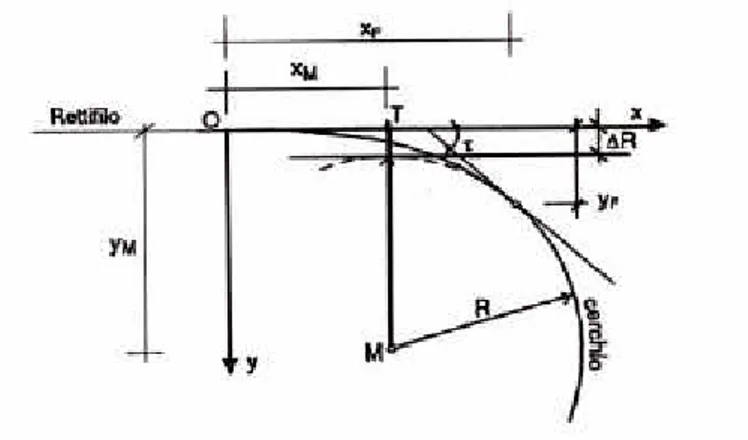
Generalmente è fissata la posizione del rettifilo e della curva (e quindi è noto lo scostamento ∆R con il rettifilo). Si tratta di individuare il parametro A e l’origine del sistema di assi a cui è riferita la clotoide.
Figura 4.8 – Inserimento di una clotoide tra un cerchio ed un rettifilo
Il parametro A della clotoide e le altre grandezze si ricavano dalle seguenti espressioni:
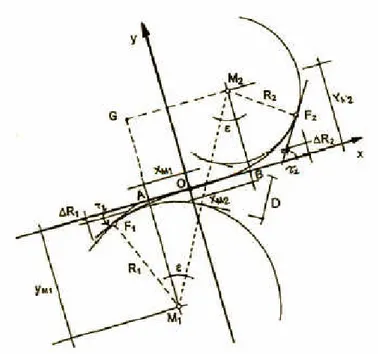
CLOTOIDE DI FLESSO
I dati del problema sono i raggi R1 e R2 dei due cerchi da raccordare e la
posizione relativa dei due cerchi individuata dalla distanza D. Resta da determinare i valori dei parametri A1 e A2 con A1 ≠ A2 (oppure solo un
parametro A=A1=A2 se la clotoide introdotta è simmetrica) dei due rami
di clotoide e la posizione del sistema di assi cui essi sono riferiti. Le espressioni che consentono di determinare il parametro A e le altre grandezze sono di seguito riportate.
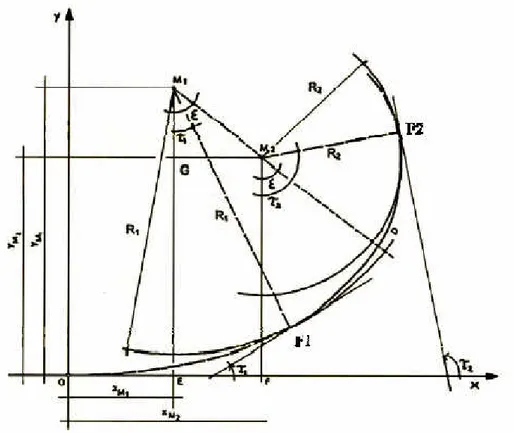
CLOTOIDE DI CONTINUITA’
I dati del problema sono i due raggi R1 e R2 delle curve e la distanza D
Figura 4.10 – Inserimento di una clotoide di continuità
Le espressioni che consentono di determinare il parametro A e le altre grandezze sono di seguito riportate.
Nel caso di clotoide di transizione (rettifilo-curva) il parametro A, stabiliti R e ∆R, è stato ricavato immediatamente dalla relazione:
Nei casi delle clotoidi di flesso e continuità, il parametro A è stato ottenuto tramite un procedimento iterativo ovvero, dopo aver fissato come dati iniziali R1, R2 e D, il valore di A assunto è stato quello che per
tentativi risolveva le seguenti equazioni:
Da applicare la prima per le clotoidi di flesso, la seconda per quelle di continuità. Nel caso delle clotoidi asimmetriche (A1 ≠ A2), il
procedimento adottato è stato il medesimo salvo avere precedentemente fissato il rapporto A1/A2 (in modo da avere un’incognita soltanto) con
avvalsi di un software di calcolo. Il passo successivo è stato quello di verificare i parametri A ottenuti. Per una migliore visione, sia il calcolo sia la verifica delle clotoidi sarà riportata in apposite tabelle.
VERIFICA 1: limitazione del contraccolpo.
Affinché lungo un arco di clotoide si abbia una graduale variazione dell’accelerazione trasversale non compensata nel tempo (contraccolpo c), fra il parametro A e la massima velocità, V (km/h), desunta dal diagramma di velocità, per l’elemento di clotoide deve essere verificata la relazione:
VERIFICA 2: sovrapendenza longitudinale delle linee di estremità della carreggiata.
Nelle sezioni di estremità di un arco di clotoide la carreggiata stradale presenta differenti assetti trasversali, che vanno raccordati longitudinalmente, introducendo una sovrapendenza nelle linee di estremità della carreggiata rispetto alla pendenza dell’asse di rotazione. Nel caso il raggio iniziale sia di valore infinito (rettilineo o punto di flesso), il parametro deve verificare la seguente disuguaglianza:
dove:
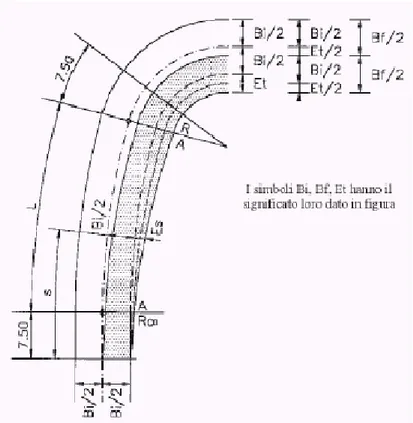
Bi = distanze fra l’asse di rotazione e il ciglio della carreggiata nella
sezione iniziale della clotoide
∆imax (%) = sovrapendenza longitudinale massima della linea costituita dai
punti che distano Bi dall’asse di rotazione; in assenza di allargamento tale linea coincide con l’estremità della carreggiata
q i = i ci/100 dove i ci = pendenza trasversale iniziale, in valore assoluto
q f = i cf/100 dove i cf = pendenza trasversale finale, in valore assoluto
Nel caso in cui anche il raggio iniziale sia di valore finito (continuità) il parametro deve verificare la seguente disuguaglianza:
dove:
R i = raggio nel punto iniziale della clotoide
VERIFICA 3: criterio ottico
Per garantire la percezione ottica del raccordo deve essere verificata la relazione:
Inoltre, per garantire la percezione dell’arco di cerchio alla fine della clotoide, deve essere:
4.4.5 Allargamento della carreggiata in curva
Lungo le curve circolari la sezione trasversale viene modificata, rispetto ai tratti rettilinei, sia per quanto riguarda la pendenza trasversale, sia con riferimento alla larghezza della carreggiata; queste variazioni si realizzano in massima parte lungo le clotoidi. Ogni corsia deve essere aumentata della quantità E (in metri) data dalla relazione:
E = k/R
Con k = 45 e R pari al raggio esterno della corsia in metri.
Quando R > 40 m si può assumere come valore del raggio quello relativo all’asse della carreggiata. L’allargamento complessivo della carreggiata è pari alla somma degli allargamenti delle singole corsie. Se E < 20 cm, la corsia conserva immutata la larghezza che ha in rettifilo.
Quindi: k=45 E=0,20 m si ricava R= 45/0,20 =225 m Per R > 225 m, non si effettua l’allargamento.
L’allargamento complessivo della carreggiata deve essere riportato tutto sul lato interno della curva (Figura 4.11) in pagina seguente. Le banchine e le eventuali corsie di sosta conservano le larghezze che hanno in rettifilo.
4.5 Visibilità in curva
Precedentemente avevamo parlato delle curve circolari e della valutazione dei raggi di tali curve. E’ necessario, adesso, verificare che quei raggi garantiscano la visibilità. In curva deve essere garantita la visibilità dell’asse della corsia perché così il conducente può venire da esso guidato e quindi potrà mantenere una traiettoria corretta; inoltre in curva deve essere sempre garantita la distanza di visibilità per l’arresto e, se vogliamo assicurare il sorpasso, anche la distanza di visibilità per il sorpasso.
4.5.1 Visibilità del ciglio interno
Affinché un conducente che percorre una curva a velocità V veda il margine interno della corsia deve verificarsi che R > R0, essendo R0 il
In Figura 4.12, A rappresenta la posizione dell’occhio del conducente, AD è la porzione di traiettoria curvilinea che deve essere vista quando l’occhio è accomodato alla distanza l0 con angolo della visione periferica
2Φ. Il valore di R0 si calcola con la seguente espressione:
Sia l0 che 2Φ dipendono dalla velocità (Figure 4.13 e 4.14)
Figura 4.14 – Relazione tra il campo di visione periferica 2Φ e la velocità V
Tenendo conto dell’equilibrio dinamico in curva, per la strada tipo C, il raggio minimo è di 118 m. Volendo garantire la visibilità del ciglio interno si ottiene un raggio minimo R0, sfruttando la formula precedente
per V = 60 km/h, di:
Un raggio di 118 m può quindi essere inserito solo eccezionalmente nel tracciato di categoria C, il cui raggio minimo “non deve” scendere al disotto di 300 m. Anche se questo criterio per il calcolo del raggio di una
4.5.2 Visibilità per l’arresto e per il sorpasso
Il conducente di un veicolo che percorre un tratto in curva deve poter vedere un oggetto qualsiasi, che eventualmente venga a trovarsi sulla sua traiettoria, ad una distanza tale da potersi arrestare. Deve quindi essere garantita sempre la distanza di visibilità per l’arresto, e tanto più possibile, nelle strade a due corsie, la distanza di visibilità per il sorpasso. In curva, limitazioni alla visibilità possono derivare da ostacoli presenti all’interno della curva quali muri, scarpate in trincea, barriere di sicurezza, siepi, ecc., e, nelle curve a sinistra, in galleria o nelle strade a doppia carreggiata, barriere di sicurezza e/o siepi antiabbaglianti. Le Norme precisano che tra gli ostacoli non vanno considerati i veicoli in colonna. Occorre precisare che deve trattarsi di ostacoli aventi un certo sviluppo o, al limite, continui: gli ostacoli isolati di piccole dimensioni (alberi isolati, pali, ecc.) non rientrano in questo discorso. Indicando con la distanza dell’ostacolo, con R’ il raggio in asse della corsia e con D la distanza di visuale libera che si vuole assicurare, si ricava:
Per quanto riguarda il sorpasso in curva la relazione precedente garantisce la visibilità richiesta quando DS è minore dello sviluppo della curva. In
caso contrario si rende necessaria una verifica grafica. Viceversa noti ∆ e R’ si può ricavare la distanza D disponibile dalla relazione precedente, arrestando lo sviluppo in serie del coseno al secondo termine, ottenendo:
Figura 4.15 – Controllo della visibilità in curva
Nel nostro lavoro abbiamo garantito lungo tutto il tracciato, la distanza di visibilità per l’arresto e, quando possibile, anche quella per il sorpasso.
4.6 Diagramma delle velocità
E’ noto, che ad ogni strada, è associato un intervallo di velocità di progetto definito come “l'intervallo entro cui sono comprese, per ciascuna categoria di strade, le massime velocità che i veicoli possono mantenere con sicurezza in ogni punto quando la velocità è limitata dalla sola geometria”. Il limite superiore dell’intervallo, Vp max, è la velocità che può
tenersi in piano ed in rettifilo, mentre il limite inferiore, Vp min, è la
velocità con cui si progettano gli elementi più vincolanti.
Il diagramma delle velocità non è altro che la rappresentazione grafica della funzione V=f(s), ossia dell'andamento della velocità in funzione della progressiva dell'asse stradale. Si costruisce, sulla base del tracciato planimetrico, calcolandone per ogni elemento l’andamento della velocità. Il modello si basa sull'assunzione delle seguenti ipotesi:
• sui rettifili, sulle curve circolari con raggio non inferiore a R2,5 e
lungo le clotoidi la velocità tende al limite superiore dell’intervallo di velocità di progetto; gli spazi di accelerazione e di decelerazione, rispettivamente, in uscita o in ingresso ad una curva circolare ricadono negli elementi considerati spazio (rettilineo, curve con R> R2,5 e clotoidi);
• su tutte le curve circolari con raggio inferiore a R2,5 la velocità è
costante;
La decelerazione termina all'inizio della curva circolare, mentre l'accelerazione comincia all'uscita della curva circolare; è a partire da questi punti, quindi, che vanno riportate le distanze di transizione.
Si definisce distanza di transizione DT, lo spazio necessario per passare da
una velocità V1 a una velocità V2 competenti a due elementi che si
succedono. Tale distanza (m) si calcola con la seguente espressione:
Affinché il conducente possa attuare la decelerazione è necessario che la curva sia percepita e vista come tale; per cui deve essere:
DT≤ D essendo D la distanza di visuale libera che precede la curva
DT ≤ Dr essendo Dr la distanza di riconoscimento
Per distanza di riconoscimento s’intende la lunghezza massima del tratto di strada entro il quale il conducente può riconoscere eventuali ostacoli e avvenimenti. Dr si calcola con la seguente espressione:
con: t = 12 sec
Resta da specificare che il tracciato da noi proposto è inserito in un contesto di una rete di infrastrutture esistenti alla quale sarà collegata attraverso l’inserimento di intersezioni a rotatoria. In corrispondenza di queste intersezioni, l’andamento delle elocità è stato valutato prescindendo dal modello: si è ipotizzato che la velocità decresca linearmente fino a zero (con uno spazio pari alla distanza di arresto) per poi ripartire con una velocità di 40 km/h all’uscita dall’intersezione, accelerando con una a = 0,8 m/s2. Tale velocità è quella assunta per la percorrenza dell’anello. Prove sperimentali hanno, infatti, dimostrato che l’automobilista in fase di uscita tende a mantenere la velocità in rotatoria effettuando un breve rilascio dell’acceleratore in fase di impostazione della contro curva, manovra che produce una riduzione di velocità trascurabile, per poi accelerare appena imboccato il ramo di uscita.
4.7 Andamento altimetrico dell’asse
Le pendenze longitudinali massime per le strade di tipo C e F sono del 7% e 10% rispettivamente. Tra due livellette consecutive è necessario, per motivi di sicurezza, confortevolezza e regolarità di marcia, inserire raccordi curvilinei. La soluzione è caduta su quelli parabolici, perché questi appaiono migliori per quanto riguarda il moto, per la loro proprietà di avere una variazione di pendenza per unità di lunghezza costante.
Il tracciamento del raccordo verticale con arco di circonferenza risulta poco pratico, tenuto conto che, difficilmente, la verticale per il punto d’incontro delle due livellette da raccordare coincide con la bisettrice dell’angolo che esse formano. Di conseguenza anche se la lunghezza del raccordo si calcola come arco di curva circolare, si preferisce effettuare il suo tracciamento come arco di curva parabolica di pari lunghezza. L’espressione che consente di risolvere il problema è:
Figura 4.16 – Elementi geometrici dei raccordi parabolici
Alle pendenze viene attribuito convenzionalmente un segno, positivo in salita e negativo in discesa. Essendo ∆i =i2-i1 risulta sempre ∆i<0 nei
raccordi convessi e ∆i>0 per quelli concavi.
1. Assicurare il comfort dell’utente;
2. Assicurare le visuali libere necessarie per la sicurezza di marcia. Con il primo criterio si pone un limite all’accelerazione verticale aV, come
suggerito dalle Norme, a Vmax = 0,6 m/s2 per cui risulta:
Rv = 0,129 V2
Dove V (km/h) è la velocità con cui viene percorso il raccordo.
Il secondo criterio richiede che il conducente possa vedere, ad una distanza D pari almeno alla distanza di arresto Da, un oggetto che si trovi
sulla sua traiettoria; devono essere esaminati separatamente i raccordi concavi e quelli convessi.
4.7.1 Raccordi concavi
Con luce diurna non si pongono problemi di visibilità, mentre di notte è necessario garantire che il tratto di strada illuminato dai fari abbia lunghezza non inferiore alla distanza di arresto Da Il problema del
sorpasso non si pone nemmeno di notte perché si vedono le luci del veicolo che sopraggiunge in senso opposto. Il raggio minimo del raccordo verticale si determina come segue, distinguendo due casi: Da<L o Da>L.
Siano:
Rv = raggio del raccordo verticale concavo [m]
D = distanza di visibilità da realizzare per l’arresto di fronte ad un ostacolo fisso [m]
∆i = variazione di pendenza delle due livellette, espressa in percentuale
h = altezza del centro dei fari del veicolo sul piano stradale [m]
θ = massima divergenza verso l’alto del fascio luminoso rispetto all’asse
del veicolo
Essendo h=0,50 m e θ=1°. Le Norme riportano un abaco (Figura 4.17) che traduce graficamente due relazioni di Rv a seconda che sia Da < L o
4.7.2 Raccordi convessi
Il raggio dei raccordi convessi dovrà essere tale da garantire la visibilità sul raccordo per la sicurezza della circolazione. La distanza di visibilità D tra l’occhio del conducente e l’ostacolo dovrà essere pari alla distanza di arresto DA. Nel caso si voglia assicurare il sorpasso allora si assumerà
D=Ds.
Con riferimento alle altezze dell’occhio del conducente e dell’ostacolo, le Norme CNR assumono h1=1,10 m e h2= 0,10 m nel caso D = Da e
h1=h2=1,10 m nel caso D = Ds. Siano inoltre:
Rv = raggio del raccordo verticale convesso [m]
D = distanza di visibilità da realizzare [m]
I = variazione di pendenza delle due livellette, espressa in percento Si distinguono due casi:
Le Norme riportano due abachi (Figure 4.18 e 4.19) che traducono graficamente le relazioni di Rv. Da questi abachi si può valutare Rv in
le livellette è bene assumere raggi dei raccordi molto grandi (ben maggiori dei valori minimi ricavati dagli abachi o dalle formule) altrimenti si ha l’impressione che vi siano dei punti angolosi.
Una volta definito il raggio, lo sviluppo L (m) può ricavarsi dall’espressione:
Nel nostro studio oltre ad aver assicurato sui raccordi una visibilità pari alla distanza di arresto, dove è stato possibile, è stata anche assicurata una distanza di visibilità pari alla distanza per il sorpasso.
4.8 Organizzazione della sede stradale
A fianco delle banchine è stato collocato l’elemento marginale avente la funzione di raccordo con le scarpate e sul quale vengono ubicati le barriere di sicurezza (dispositivo di ritenuta) e i sostegni della segnaletica e dell’eventuale illuminazione. L’elemento marginale è in terra ed è sopraelevato di 10 cm rispetto alla banchina ed ha una larghezza di 75 cm. Il dispositivo di ritenuta può essere omesso se l’altezza del rilevato non supera i 3,00 ÷ 4,00 m. Per le cunette si è scelta la sezione trapezoidale avente base minore ed altezza di 50 cm. Per quanto riguarda le scarpate, queste dovranno avere la conformazione che meglio corrisponde alla morfologia ed alla natura del terreno oltre al rispetto delle condizioni di stabilità. Per i rilevati, spesso, si hanno scarpate con pendenze pari a 3/2 corrispondente, per molte terre, all’angolo di naturale declivio. Scarpate più ripide, nei rilevati, sono soggette ad erosione da parte delle acque oltre ad essere pericolose in caso di fuoriuscita di un veicolo dalla piattaforma. Per le trincee, il valore della pendenza della scarpata dipende anche dalla visibilità in curva. Comunque, in tutti i tipi di strade la pendenza che si intende assegnare alle scarpate, sia di rilevato che di trincea, deve essere verificata con i metodi di calcolo propri della geotecnica.
Sulle opere di scavalcamento devono essere mantenute invariate le dimensioni degli elementi componenti la piattaforma stradale, relative al tipo di strada di cui fanno parte dette opere. Sul lato esterno della
sistemata una barriera di sicurezza ubicata in modo che la faccia rivolta verso la strada si trovi al limite della banchina. Sul lato esterno del marciapiede si dispone il parapetto (Figura 4.20).
E’ stata garantita una distanza di 5,00 m, tra l’intradosso delle strutture soprastanti ed il punto di maggior quota della carreggiata sottostante, onde consentire il transito di mezzi speciali anche sulla strada sottostante.
Figura 4.20 – Sistemazione dell’elemento marginale della sezione stradale sulle opere di scavalcamento
Come riportano le Norme CNR le strade di tipo C ed F devono essere dotate di piazzole di sosta ubicate all’esterno della banchina. Le dimensioni di queste piazzole sono riportate in Figura 4.21. Sono state disposte ad una distanza media di circa 1000 m, su ciascun lato della
4.8.1 Canalizzazioni delle acque superficiali
Come detto, ai margini della banchina è stato introdotto l’elemento marginale (arginello). Essendo sopraelevato, per l’allontanamento dell’acqua dalle banchine e dalle superfici a verde dei rilevati stradali, si praticano sugli arginelli piccoli tagli che imboccano su scivoli disposti, a interasse di 20 m, lungo la scarpata, formati da tegole prefabbricate in calcestruzzo cementizio a pianta trapezia e sezione di deflusso variabile dove l’elemento di canaletta superiore entra con la parte più stretta nell’elemento di canaletta inferiore, sovrapponendosi parzialmente ad esso. Le acque saranno convogliate così all’interno di un fosso di guardia, realizzato con canalette prefabbricate in cls e posizionato al piede del rilevato stradale.
4.8.2 Muri di controripa
Per sostenere le trincee di altezza rilevante e per ridurre la zona di occupazione, è stata prevista, in prima analisi, la realizzazione di muri di controripa. Data la semplicità costruttiva e gli elevati valori di resistenza che si possono ottenere, si è optato per la realizzazione di muri di controripa in calcestruzzo. E’ necessario che i muri siano drenati a monte, per questo tra il muro e la ripa saranno disposti dei filtri drenanti con tubo che raccoglie l’acqua alla base. Alle spalle del muro, in alto, ci sarà il fosso di guardia che dovrà raccogliere l’acqua superficiale in arrivo da monte.
4.9.1 Premessa
Si definisce intersezione stradale (nodo) l’area individuata da tre o più tronchi stradali (archi) che convergono in uno stesso punto, nonché dai dispositivi e dagli apprestamenti atti a consentire ed agevolare le manovre per il passaggio da un tronco all’altro. Le intersezioni, costituiscono quindi punti critici del sistema viario per effetto delle interferenze che in esse si instaurano tra le diverse correnti di traffico. Si acuiscono pertanto, nel loro ambito, i problemi legati alla sicurezza e quelli relativi alla regolarità ed efficienza della circolazione. Con riferimento alla sicurezza è importante la localizzazione dell’incrocio: è necessario che esso sia ben visibile e chiaramente percepito dagli utenti ed è desiderabile che le strade si intersechino sotto angoli non troppo acuti. Nelle intersezioni a raso le manovre che possono avvenire si distinguono in manovre di convergenza, di divergenza e di intersezione. Per quanto riguarda la visibilità, per il corretto e sicuro funzionamento delle intersezioni, è necessario che i veicoli che giungono all’incrocio e che si apprestano a compiere le manovre di attraversamento o di immissione possano reciprocamente vedersi, onde adeguare la loro condotta di guida nel rispetto dei modi di regolazione dell’incrocio stesso. Qualunque sia la manovra da compiere per seguire un determinato percorso, si verificano, quindi una o più interferenze fra correnti che rappresentano potenziali punti di collisione tra veicoli e che vengono denominati punti di conflitto. Quando si progetta un’intersezione l’obiettivo principale è cercare di ridurre questi
4.9.2 Rotatorie
La definizione classica di rotatoria, elaborata dalla Normativa Francese, è la seguente: “Incrocio costituito da un’area centrale inaccessibile, circondata da un anello percorribile in una sola direzione ed in senso antiorario dal traffico proveniente da più entrate, annunciato da specifiche indicazioni segnaletiche.
Queste ultime indicano all’utenza l’immissione in una particolare intersezione, dove vige la regola della precedenza ai veicoli che percorrono l’anello, qualunque sia il tipo di strada che si sta lasciando”. Il nuovo Codice della Strada ed il D.P.R. 16 Dicembre 1992, n° 495 non pongono ostacoli alla realizzazione di incroci a rotatoria con precedenza ai veicoli che percorrono l’anello. In particolare l’art.7 del nuovo Codice della Strada recita: “Nei centri abitati i Comuni possono, con ordinanza del sindaco… stabilire la precedenza su determinate strade, ovvero in una determinata intersezione, in relazione alla classificazione di cui all’art.2 e, quando l’intensità o la sicurezza lo richiedano, prescrivere ai conducenti, prima di immettersi su una determinata strada, l’obbligo di arrestarsi all’intersezione e di dare la precedenza a chi circola su quest’ultima”. Una sistemazione a rotatoria presenta una serie di aspetti positivi:
• la connotazione di un luogo;
• la moderazione del traffico (la rotatoria invita a percorrere traiettorie comportanti una riduzione della velocità);
la marcia;
• una segnaletica stradale semplificata.
Lo svantaggio di questo tipo di intersezione risiede nel fatto di richiedere grande spazio e terreni pressoché pianeggianti. Inoltre non attribuendo priorità ad alcuna delle strade che si intersecano, è particolarmente idonea in quelle situazioni in cui tali strade sono dello stesso livello gerarchico. Altro limite è l’incapacità di venire potenziata in futuro per adeguarsi a nuovi volumi di traffico.
La politica odierna privilegia queste intersezioni a scapito delle intersezioni lineari, in quanto queste ultime sono sedi di incidenti spesso fatali. Sono le svolte a sinistra le manovre più rischiose, poiché oltre alla notevole differenza di velocità esistente tra chi svolta e chi prosegue diritto, il pericolo è rappresentato dal fatto che queste due manovre presentano punti di conflitto sotto angoli di 90°. La rotatoria elimina di fatto questo rischio, poiché ad ogni ramo d’entrata obbliga la svolta a
destra. Inoltre minori velocità operative portano ad incidenti meno severi
e meno frequenti. Anche le traiettorie che si intersecano sotto angoli molto stretti aumentano, di fatto, la sicurezza in rotatoria. Dal punto di vista dei perditempo la rotatoria offre dei vantaggi. L’utilizzo del diritto di precedenza piuttosto dello Stop spesso comporta un perditempo minore; inoltre, in genere, il perditempo totale sarà minore rispetto ad un incrocio semaforizzato di analoga capacità.
intersezioni a rotatoria è quindi risultata la più idonea. Nell’ambito di questo lavoro, l’utilizzo delle rotatorie è stato cospicuo, tra le intersezioni esistenti modificate in rotatorie e tra quelle invece progettate ex novo, sono state inserite cinque rotatorie.
4.9.3 Progettazione delle rotatorie
Nella progettazione delle rotatorie si è tenuto conto dell’orientamento attuale di non superare determinate dimensioni. Attualmente si cerca di evitare rotatorie, con due corsie nell’anello, aventi dimensioni superiori a circa 55 ÷ 60 m di diametro. Laddove non diversamente specificato, le rotatorie inserite rispettano questa dimensione.
Nella progettazione delle rotatorie è importante considerare una serie di elementi che ne individuano la geometria (Figura 4.23):
• Raggio esterno Re;
• Raggio interno Ri;
• Larghezza dell’anello di circolazione Ba;
• Raggi di entrata R1 e R3;
• Raggi di uscita R4 e R6;
• Larghezza dell’ingresso Bi;
Figura 4.23 – Elementi di progetto delle rotatorie
Nel nostro studio abbiamo progettato rotatorie aventi:
• Bi = 7 – 8 m ovvero ingressi a due corsie da 3,5 – 4 m ciascuna. In
questo modo si fornisce ai veicoli in attesa di immettersi nell’anello la possibilità di disporsi in più file, e quindi di sfruttare in modo più efficace i gap che si presentano nella corrente che percorre l’anello;
• Bu = 5 m. La corsia in uscita è unica per evitare l’affiancamento di
due veicoli, ma tale larghezza permette comunque l’uscita nel caso questa sia occupata da un veicolo in panne. In questo modo si evita l’autosaturazione della rotatoria;
• R1 = 15 ÷ 20 m. Come riportano le “Norme sulle caratteristiche funzionali e geometriche delle intersezioni stradali” (studio a carattere prenormativo), il raggio della traiettoria d’entrata deve
di uscita deve essere superiore al raggio della circonferenza dell’isola giratoria interna, garantendo comunque un valore minimo non inferiore a 15 ÷ 20 m. Quando possibile è sempre stato adottato R4 = 40 m;
• Re = 50 ÷ 60 m;
• Ba = 9 ÷9,5 m per le rotatorie con due corsie nell’anello e Ba = 12 m per le rotatorie con tre corsie nell’anello. Avendo l’anello una carreggiata superiore a 7 m, è necessario introdurre strisce longitudinali discontinue di separazione delle corsie lungo l’anello (art.138 del Regolamento di Attuazione del Codice della Strada)
• R3 e R6 dell’ordine di 200 ÷ 300 m. Tali raggi sono relativi alle curve di raccordo, ovvero dove comincia l’allargamento.
Per la definizione della geometria delle rotatorie abbiamo fatto riferimento anche alle Norme Americane (U.S. Department of trasportation, Federal Highway Administration “Roundabouts: An Informational Guide”, TFHRC, U.S.A.), le quali forniscono due metodi su come ottenere le giuste svasature in ingresso e in uscita a partire dal disegno dell’isola spartitraffico. Soffermandoci ancora sulla Figura 4.23, osserviamo come l’isola spartitraffico sia stata definita dalle zone comprese tra due archi di curva circolare, aventi raggi tra 40 e 80 m, e che siano tangenti all’asse della strada che immette in rotatoria e all’isola centrale (in Figura 24 sono i raggi R2 e R5). Grazie a questi archi le traiettorie dei veicoli vengono gradualmente deflesse dalla traiettoria iniziale che indirizzerebbe al centro della rotatoria. A partire da questi
limiti si assegnano le larghezze delle corsie in ingresso ed in uscita, corsie che andranno raccordate con l’anello esterno della rotatoria attraverso i raggi di entrata R1 e di uscita R4 precedentemente definiti. Infine vengono inseriti i raggi di raccordo R3 e R6 rispettivamente dove inizia l’allargamento in entrata e dove invece termina in uscita. Per facilitare la svolta dei mezzi pesanti, la corona centrale è stata delimitata da un cordolo sormontabile della larghezza di 2 m.
E’ stata data molta importanza al controllo della deflessione delle traiettorie in attraversamento del nodo, ed in particolare alle traiettorie che interessano due rami opposti o adiacenti rispetto all’isola centrale. Essendo scopo primario delle rotatorie un controllo assoluto delle velocità all’interno dell’incrocio, risulta essenziale che la geometria complessiva impedisca valori cinematici superiori ai limiti usualmente assunti a base di progetto, e cioè con velocità massime di 40 ÷ 50 km/h per le manovre più dirette. Si definisce in particolare deflessione di una traiettoria il raggio dell’arco di cerchio che passa a 1,5 m dal bordo dell’isola centrale e a 2 m dal ciglio delle corsie di entrata e uscita (Figura 4.24). Tale raggio non deve superare i valori di 80 ÷ 100 m, cui corrispondono le usuali velocità di sicurezza nella gestione di una circolazione rotatoria.
Figura 4.24 – Deflessione della rotatoria
In tutte le rotatorie introdotte il raggio di deflessione è risultato abbondantemente al di sotto dei valori massimi sopra riportati. In questo modo le velocità di percorrenza dell’anello giratorio sono molto contenute (20 ÷ 30 km/h) garantendo, così, un’elevata sicurezza.
Per quanto riguarda la visibilità negli incroci rotatori facciamo riferimento alle “Norme sulle caratteristiche funzionali e geometriche delle intersezioni stradali” (studio a carattere normativo). Queste indicano che: gli utenti che si avvicinano ad una rotatoria devono percepire i veicoli con precedenza all'interno della corona in tempo per modificare la propria velocità per cedere il passaggio o eventualmente fermarsi.
Per i casi specifici della rotatoria si adottano le seguenti prescrizioni:
• la posizione planimetrica si pone sulla mezzeria della corsia d'entrata in rotatoria e l'altezza di osservazione si colloca ad 1 m sul piano viabile;
• nel caso di quattro o più bracci, la zona di cui è necessaria la visibilità completa corrisponde al quarto di corona giratoria posta alla sinistra del canale di accesso considerato;
• nel caso di tre bracci, la zona si deve estendere fino all'innesto viario più prossimo in sinistra.
Risulta perciò evidente che affinché la visibilità sia garantita, debbano essere assenti ostacoli di altezza superiore ad 1 m. Questa condizione è più difficilmente raggiungibile nel caso della rotatoria a tre bracci, poiché la presenza dell'isola giratoria rialzata potrebbe non garantire la visibilità richiesta.
Si definisce capacità del braccio di una rotatoria il più piccolo valore del flusso sul braccio che determina la presenza permanente di veicoli in attesa di immettersi.
Questo valore del flusso dipende evidentemente dal flusso che percorre l’anello, e quindi dall'insieme dei flussi in ingresso e in uscita da tutti bracci della rotatoria. Non è pertanto possibile calcolare la capacità di un braccio se non è nota l'intera matrice M origine - destinazione della rotatoria, il cui generico elemento (i,j) rappresenta il flusso in ingresso dal braccio i che esce al braccio j, dalla quale si ricava la matrice di distribuzione N, il cui generico elemento (i,j) fornisce la frazione del flusso entrante da i che esce in j.
Per le rotatorie si hanno due diverse definizioni di capacità: la capacità semplice e la capacità totale. Questa valutazione può essere effettuata con diversi metodi, noi seguiremo il metodo proposto dalla normativa francese essendo questo specifico per il calcolo della capacità per le rotatorie in ambito extraurbano. Questo metodo messo a punto in Francia nel 1987 dal SETRA ha il pregio di fornire, oltre al valore della capacità, anche altri elementi utili per la conoscenza del livello di servizio di una rotatoria. Sia la capacità che i flussi sono espressi in autovetture equivalenti per ora (uvp/h), nell’omogeneizzazione dei flussi per i veicoli diversi dalle autovetture sono stati utilizzati dei coefficienti di equivalenza.
Diciamo SEP la larghezza dell’isola spartitraffico sul ramo, ENT la larghezza dell’entrata misurata subito dietro al primo veicolo fermo davanti alla linea di “dare la precedenza”, ANN la larghezza dell’anello, mentre ancora QU e QC individuano, rispettivamente, il flusso uscente e
quello circolante in corrispondenza dell’entrata (Figura 4.25).
Figura 4.25 – Caratteristiche geometriche e di traffico di una rotatoria
La capacità dell’entrata secondo il metodo francese è quindi esprimibile mediante un legame funzionale del tipo:
Qe = f(SEP,ENT,ANN,QU,QC) (4.1)
Il procedimento di esplicitazione si articola nei seguenti tre passi:
1. Calcolo del traffico uscente equivalente QU* in funzione di QU in
QC e QU* e della larghezza ANN (in metri) dell’anello:
Qg = [QC + (2/3)QU*][1 – 0.085 (ANN – 8)] (4.3)
3. Determinazione della capacità dell’entrata come: Qe = (1330 – 0,7Qg)[1+0,1(ENT – 3,5)] (4.4)
Riguardo alla formula francese del SETRA si può notare come la variabile geometrica più rilevante sia la larghezza ENT dell’entrata (misura presa a circa 6 metri dalla linea di precedenza). Quest’ultima non è affatto costante dato che i diversi rami hanno in genere svasature differenti. La formulazione finora vista può ritenersi adatta per le rotatorie di grande diametro (da 40 ÷ 45 m in poi).
4.9.5 Capacità semplice e capacità totale
Dalla formula della capacità di un’entrata si possono calcolare due indici prestazionali di notevole interesse tecnico: la capacità semplice e la
capacità totale della rotatoria.
Il primo indice, la capacità semplice, individua, rispetto a un dato scenario di ripartizione dei flussi di traffico, quel valore di flusso massimo che si può avere in entrata da ciascun ramo al momento che per uno di questi sia ha l’inizio della congestione.
Il secondo indice prestazionale, la capacità totale, rappresenta, sempre rispetto a un dato scenario di ripartizione del traffico, la somma dei valori dei flussi entranti da ogni ramo e che simultaneamente determinano la congestione dei rami stessi.
Per una rotatoria a m rami, dato un vettore Q = [Qi] dei flussi in entrata
una matrice P = [Pij] della distribuzione percentuale del traffico fra i vari
bracci, è possibile scrivere per i flussi circolanti davanti alle entrate, QCi, e per quelli in uscita, QUi (i = 1,…,m), le relazioni:
Date le relazioni di capacità della formula (4.4), per le (4.5) e le (4.6) si possono allora scrivere m equazioni, una per ogni entrata, del tipo:
4.9.5.1 Capacità semplice
Fissata una matrice P = [Pij] della distribuzione percentuale del traffico fra
i vari bracci di un dato vettore Q = [Qi] dei flussi in entrata, la formula di
capacità dell’entrata (4.1) scritta per ciascuna entrata, serve per calcolare la capacità semplice: si cerca, infatti, quel coefficiente moltiplicativo di tutti i flussi entranti nella rotatoria che determinano per primi l’inizio della congestione. Esso è il minore tra i quattro che risolvono le equazioni (4.7) previa esplicitazione dei Cei mediante la (4.4):
δiQei = Cei = 1500 – (8/9) δi Qgi
in cui si sostituiscono le Qgi calcolate dalle (4.3) attraverso le relazioni
funzionali (4.5) e (4.6).
Sia δ* = δj il minor denominatore trovato, allora l’entrata j è la prima a
raggiungere la congestione nell’ipotesi che i flussi entranti aumentino uniformemente di δ* volte e la capacità semplice della rotatoria vale:
La capacità totale della rotatoria rappresenta, per una data matrice di distribuzione percentuale dei flussi di traffico, una misura sintetica dell’attitudine limite della rotatoria a smaltire il traffico quando ad ognuno dei bracci sono presenti code. La capacità totale è quindi CT =
∑Cei nell’ipotesi che le capacità Cei delle singole entrate si raggiungano
simultaneamente e che, ai fini del calcolo, occorre appunto determinare. Questo implica la soluzione di un sistema di tante equazioni e pari incognite, le Cei, quanti sono i bracci afferenti,che si ottiene dalla
relazione funzionale capacità entrata/flussi entranti Cei = fi(QCi,QUi) scritta
appunto per ogni entrata e imponendo nelle (4.5) e (4.6) le condizioni Qi
= Cei:
Per risolvere questo sistema si impiega il metodo di Gauss-Seidel. Il metodo è iterativo e, assegnato al primo passo un insieme di valori di partenza Cei1, ad ogni passo k genera i valori Ceik+1 per il passo successivo
Il procedimento iterativo si arresta quando è soddisfatto il test di convergenza, ovvero quando l’approssimazione media tra due soluzioni successive diviene inferiore ad un valore ε ritenuto sufficientemente piccolo (3%), cioè quando è verificata la relazione:
La capacità totale CT si ottiene infine per somma di tutte le capacità di
entrata per gli m rami così determinate:
Le norme SETRA 1988 riportano poi due abachi (Figure 4.26 e 4.27) per il calcolo di altrettanti indicatori prestazionali: il tempo medio di attesa,
Figura 4.26 – 99mo percentile della lunghezza di una coda
Per quanto attiene ora ai livelli di servizio, per le rotatorie, i manuali di capacità e di letteratura tecnica non forniscono criteri per la loro valutazione. Ciò dipende dalla non disponibilità per questo tipo di intersezioni, ad oggi, di indicazioni sui diversi livelli di accettabilità dal ritardo da parte degli utenti al variare delle condizioni di circolazione. Detto questo, il livello di servizio, LoS, verrà da noi determinato in analogia ai valori dei tempi medi di attesa riportati nelle Tabella 10.3 del Manuale HCM 1994 per le intersezioni non semaforizzate.