Appendice B
Interfaccia di comunicazione seriale
B.1 Introduzione
La comunicazione seriale è uno tra i più comuni protocolli di basso livello che vengono utilizzati per comunicazione tra due o più dispositivi.
In genere uno dei due dispositivi è il computer mentre l’altro può essere un modem, una stampante, un altro computer o, come nel nostro caso, una videocamera.
Nella comunicazione seriale l’informazione è trasmessa e ricevuta dalle porte in modo sequenziale: si trasmette cioè un bit alla volta attraverso i canali o bus di comunicazione. Differente è la comunicazione in parallelo in cui tutti i bits che rappresentano un certo simbolo sono inviati contemporaneamente.
Al confronto con la comunicazione dei dati in parallelo, l’utilizzo della trasmissione delle informazioni in seriale permette di ridurre il numero dei cavi di connessione e quindi di avere uno spazio maggiore per l’isolamento del canale di comunicazione stesso e, anche se a prima vista potrebbe sembrare svantaggiosa da un punto di vista della velocità di trasmissione dati c’è da notare che è comunque possibile aumentare la velocità del clock di comunicazione e quindi del data rate.
I protocolli di comunicazione seriale sono ormai utilizzati in quasi tutte le reti di computer e nelle comunicazioni a lunga distanza: sono di costo inferiore e sono decisamente vantaggiosi dove risulta eccessivamente complessa la sincronizzazione dei dispositivi o dove lo spazio ed il costo dei cavi diventa eccessivamente elevato in rapporto all’applicazione. Per la sua semplicità e le poco risorse hardware richieste, la comunicazione seriale e' estensivamente usata nell’elettronica industriale.
L’interfaccia fisico che permette di trasferire le informazioni in una comunicazione seriale è definita porta seriale. Nonostante l’ingresso nel mercato delle interfacce tipo USB, le porte seriali continuano ad essere presenti dove è necessario avere un’interfaccia semplice, a basso costo e che possa permettere un utilizzo bidirezionale tra i devices.
Gli standard per la comunicazione seriale, necessari a rendere compatibili e collegabili dispositivi prodotti da industrie diverse, sono stati fissati a partire dagli anni ’60 e da allora sono stati aggiornati e rivisti in seguito allo sviluppo tecnologico del settore.
B.2 EIA/TIA-232
Lo standard EIA/TIA-232, o meglio conosciuto RS232 (Recommended Standard 232), e' stato introdotto per la prima volta nel 1962 dalla Electronic Industry Association (EIA) insieme alla Telecommunications Industry Association (TIA) e da quel momento e' stato aggiornato più volte per adeguarsi alle necessità, in evoluzione, delle applicazioni della comunicazione seriale.
La versione originale aveva l’obiettivo di definire un protocollo per la comunicazione tra dispositivi digitali a bassa velocità. Sono state quindi definite le caratteristiche elettriche dei segnali, la struttura e temporizzazioni dei dati seriali, la definizione dei segnali e dei protocolli per il controllo del flusso di dati seriali su un canale telefonico, il connettore e la disposizione dei suoi pin ed infine il tipo e la lunghezza massima dei possibili cavi di collegamento.
In seguito l’interfaccia RS232 è stata ricertificata sia dall’EIA USA con le sigle EIA RS232-C (1969), EIA RS232-D (1986) ed EIA RS232-E (1991) che dal CCITT (Comité Consultatif International Téléphonique et Télégraphique) Europa con le sigle V.24 e V.28.
Il nome ufficiale dell’ultima versione dello standard e' "Interface Between Data Terminal
Equipment and Data Circuit-Termination Equipment Employing Serial Binary Data Interchange" ovvero “interfaccia tra un terminale dati e un circuito dati mediante scambio di
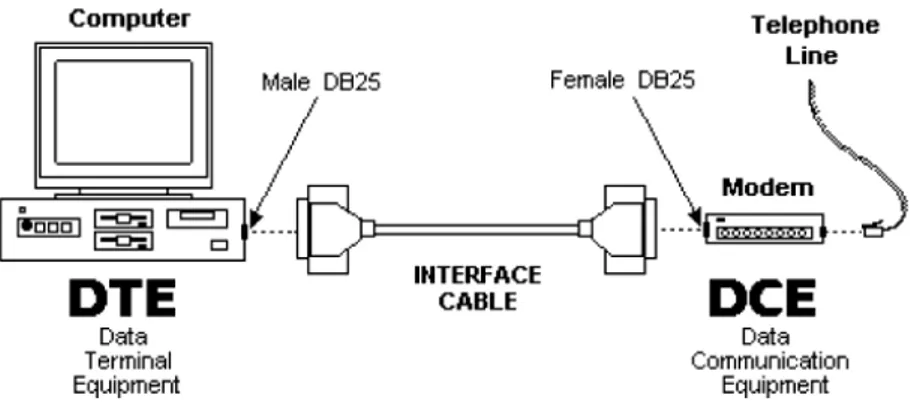
dati in maniera seriale”. In altri termini, tratta la comunicazione seriale tra un host, detto anche Data Terminal Equipment o DTE, e una periferica detta anche Data
Circuit-Terminating Equipment o DCE (figura B.1). La terminologia utilizzata riflette lo scopo
originale per cui è nata l’interfaccia RS232 ovvero come standard di comunicazione tra un terminal computer ed un modem: oggi è possibile identificare nel DCE una qualsiasi periferica digitale.
Figura B.1. Schema funzionale di comunicazione seriale tra DTE e DCE
Per l’analisi di questo tipo di interfaccia è opportuno valutarne le caratteristiche meccaniche, elettriche e funzionali.
Le caratteristiche meccaniche riguardano il tipo di piastre, cavi e connettori utilizzati, con le relative prestazioni e modalità d’uso; le caratteristiche elettriche definiscono i parametri elettrici dei circuiti di ingresso e di uscita dell’interfaccia e delle linee di collegamento tra essi (livelli logici e fisici, frequenze di lavoro, tempi ci commutazione, impedenze di ingresso, uscita e di carico, correnti disponibili, immunità al rumore, etc.); nelle caratteristiche funzionali sono definiti gli aspetti relativi ai segnali per avere una corretta inizializzazione, gestione e chiusura del colloquio, dei codici e delle procedure utilizzati, della temporizzazione e sincronizzazione da rispettare e dei comportamenti da assumere in caso di eventuali messaggi di controllo.
Partendo dall’analisi delle caratteristiche funzionali, nella sua versione completa questa interfaccia dispone di una connessione a 25 pin, suddivisibili in 6 categorie a seconda del tipo di segnale a cui sono dedicati:
# Pin
Number Function
1 1, 7 Linee di massa e schermatura
2 2, 3, 4, 5, Canali di comunicazione primaria: sono usati per lo scambio di dati ed il controllo del loro flusso. 3 16, 19 13, 14,
Canali di comunicazione secondaria:
se attivati, sono usati per il controllo di modem remoti, richiesta di ritrasmissione a causa di errori
4 20, 22, 23 6, 8, 12,
Linee di controllo e di stato:
forniscono informazioni sullo stato del modem e ne condizionano la funzionalità (handshake)
5 15, 17, 24
Segnali di trasmissione e ricezione della temporizzazione: nel caso di utilizzo del protocollo sincrono, questi segnali
trasportano il clock di sincronismo consentendo l’utilizzo di differenti velocità di comunicazione.
6 18, 21, 25
Segnali di test:
questi segnali sono usato per misurare l’integrità della linea e la qualità della comunicazione consentendo l’adeguamento della velocità di comunicazione al valore massimo consentito.
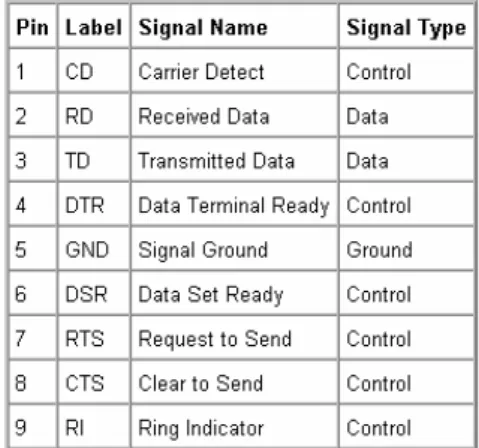
A partire da questo, comunque, molti PC utilizzano connessioni ridotte a soli 9 pin. Nelle porte seriali infatti i tipi di segnali essenzialmente trasmessi sono di soli due tipi: i segnali dati e i segnali di controllo.
L’assegnazione dei pin e dei segnali nelle porte seriali è regolata rispetto al DTE: i dati, ad esempio, sono trasmessi dal pin TD del DTE al pin RD del DCE. Nel caso, invece,
di connessione tra due DTE (o due DCE) si dovrà connettere i pin TD tra loro ed i pin RD tra loro (figura B.2).
Figura B.2 Schema di collegamento tra i pin del DTE e del DCE
Una possibile sequenza di eventi che definiscono le modalità con cui si può impostare un collegamento è la seguente:
1) I circuiti sono inizialmente disattivati
2) Ad un certo istante il decodificatore di chiamata del DCE riconosce una chiamata esterna per il DTE e avverte il DTE stesso attivando la linea di Ring Indicator (RI, pin 9)
3) Il DTE si predispone al collegamento ed avvisa di ciò il DCE attivando la linea Data Terminal Ready (DTR, pin4)
4) Il DCE, riconoscendo lo stato “ready”, collega sulla linea la circuiteria di decodifica dati ed avverte diciò il DTE attivando la linea Data Set Ready (DSR, pin 6)
Dopo queste fasi è possibile far partire una procedura di trasmissione o una di ricezione. Per la ricezione:
5r) Il DCE riconosce che in linea ci sono dati destinati al DTE e attiva la Carrier Detect (CD, pin1)
6r) I dati in arrivo dalla linea sono trasferiti dal DCE al DTE Per la trasmissione:
5t) Il DTE predispone il DCE in trasmissione attivando la linea di Request To Send (RTS, pin 7)
6t) Quando il DCE è pronto per la trasmissione avvisa il DTE attivando il circuito Clear To Send (CTS, pin 8)
7t) Il DTE trasmette i dati al DCE che a sua volta li invierà alla linea.
Lo scambio dei dati bidirezionale tra DTE e DCE necessita del settaggio di alcuni parametri in modo coincidente tra i due dispositivi:
Parametro Valori consentiti
Velocità di comunicazione bps 110, 300, 600, 1200, 2400, 4800, 9600, 19200 Parità Nessuna, Parità pari, Parità dispari
Numero di bit per carattere
(codice) 5, 6, 7, 8 Bit di stop 1, 1.5, 2
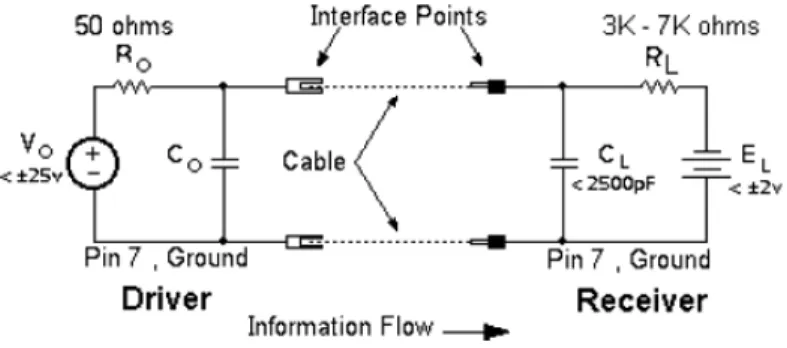
Da un punto di vista delle caratteristiche elettriche, i segnali (dati, temporizzazione o controllo) definiti nell’interfaccia RS232 possono essere modellizzati con un circuito tipo quello mostrato in figura B.3.
Figura B.3 Circuito elettrico di un devices di interfaccia basato su RS232
I segnali di interfaccia operano in logica negata e risultano validi se il loro valore, misurato rispetto a massa, è compreso tra -3 e -15 V o tra +3 e +15 V.
Per un segnale di dati lo stato “on” si verifica quando il voltaggio è inferiore a -3 V, mentre lo stato “off” quando il voltaggio è superiore ai 3 V. Viceversa, per i segnali di controllo lo stato “on” si verifica quando il voltaggio è superiore ai 3 V, mentre lo stato “off” quando il voltaggio è inferiore a -3 V.L’intervallo tra -3 e + 3 V è considerato di transizione ed il segnale non è definito.
In figura B.4 si mostrano gli stati “on” e “off” per un segnale di dati e un segnale di controllo.
Il driver del circuito di interfaccia deve essere dimensionato in modo da poter supportare sia un’interruzione di circuito che un cortocircuito con qualsiasi segnale di interfaccia, compreso quello di massa, senza subire o provocare danni.
Il formato per il trasferimento di dati seriali include un bit di start, da 5 a 8 bits dati, un bit di stop ed eventuali bit di parità e di stop (figura B.5). Di seguito è riportato il diagramma relativo al formato di dati seriali.
Figura B.5 Diagramma relativo al formato di dati seriale
Lo standard RS232 può supportare sia la comunicazione sincrona che quella asincrona. Nel protocollo di comunicazione sincrona i dispositivi sono temporizzati da un segnale di clock comune e c’è uno scambio continuo di dati. È un tipo di comunicazione più veloce rispetto a quella asincrona perchè permette di evitare l’utilizzo del bit di inizio.
Nel protocollo di comunicazione asincrona ciascun device è temporizzato dal proprio clock e i dati sono trasferiti in byte. Il vantaggio rispetto alla comunicazione sincrona è che non è necessario inviare bit continuamente.
Fisicamente il connettore definito dallo standard, nella versione a 9 pin, è mostrato in figura B.6
Figura B.6 Porta seriale RS232
B.3 EIA/TIA-422
L’interfaccia RS232 precedentemente descritta è un esempio di trasmissioni dati
single-ended. Per le caratteristiche di questo tipo di trasmissione i dati sono trasmessi con rates
relativamente lenti (Baud Rate intorno ai 20 Kb/s) e solo per brevi distanze (fino a 15 m alla massima velocità).
Lo standard di comunicazione EIA/TIA-422 (o RS422) è un protocollo di comunicazione seriale con trasmissione differenziale di dati proposto dall’Electronic Industry Association proprio per venire incontro alla necessità di stabilire comunicazioni robuste a lunga distanza e con una maggiore velocità di trasferimento dati (si raggiungono 1200m a circa 10 Mb/s).
Il differenzial signaling è un metodo di trasmissione delle informazioni in cui due segnali complementari sono trasmessi in su due cavi separati.
Il dispositivo che riceve i due segnali legge semplicemente la loro differenza e quindi, dato che ignora la differenza di voltaggio tra filo e messa a terra, le possibili differenze che si creano tra il potenziale di massa del trasmettitore e del ricevitore non vanno ad incidere sulla capacità del ricevitore di acquisire il segnale.
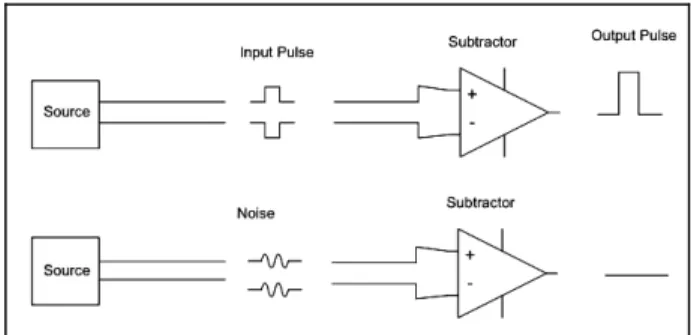
Questo tipo di trasmissione è vantaggiosa anche dal punto di vista dell’immunità al rumore nel caso di sistemi a basso voltaggio (figura B.7).
Figura B. 7 Immunità al rumore per un sistema con trasmissione differenziale
Ad oggi si cerca ormai di produrre sistemi elettronici che funzionino il più possibile a bassa potenza e con la minima emissione di radiazioni: il problema è che questi sistemi sono più sensibili al rumore. L’utilizzo di un sistema differenziale permette invece di aumentare l’immunità al rumore e quindi di diminuire la potenza di alimentazione. Confrontando con un sistema digitale single-ended alimentato con un certo voltaggio Vs si avrà livello logico alto
pari a Vs e livello logico basso pari a 0, e perciò una differenza tra i due livelli pari a Vs. Con il
sistema differenziale avrò livello logico alto pari a Vs (un filo a Vs e l’altro a 0) e livello logico
basso pari a - Vs (con i voltaggi dei fili inversi) e quindi una differenza tra i due livelli pari a
Vs-(- Vs) = 2 Vs, che significa doppia immunità a rumore.
Il sistema di trasmissione differenziale ha anche una maggiore resistenza alle interferenze elettromagnetiche (correnti o campi indotti) che introducono rumore nel segnale. I due fili che trasmettono i dati sono accoppiati e avvolti in parallelo tra loro e hanno la stessa impedenza rispetto la messa a terra e, quindi, sono affetti dalle stesse interferenze. Ma dato che il sistema
di ricezione si basa sul valore della differenza tra i due segnali, non considererà le precedenti interferenze.
I sistemi single-ended sono costituiti da un trasmettitore che genera un singolo voltaggio che viene confrontato con un voltaggio fissato dal ricevitore, entrambi relativi a un valore di massa condiviso. In questi sistemi si deve necessariamente utilizzare un livello di voltaggio alto, per evitare che fluttuazioni casuali possano trasmettere false informazioni. Hanno anche lo svantaggio di non permettere comunicazioni ad alta velocità a causa degli effetti della capacità e dell’induttanza che filtrano i segnali ad alta frequenza. Inoltre non è possibile trasmettere per lunghe distanze, perché servirebbe una potenza troppo elevata o una riduzione del voltaggio che però porterebbe ad avere troppa sensibilità al rumore e alle interferenze elettromagnetiche.
Figura B.8 Connessioni in configurazione point-to-point
RS422, oltre a permettere l’invio di dati a maggiore velocità e maggiore distanza rispetto a RS232 in una configurazione di tipo point-to-point (figura B.8), permette anche l’utilizzo in applicazioni multi-drop (figura B.9), in cui un solo driver e trasmette su un bus per più ricevitori (fino a 10, con un’impedenza in ingresso di 4 kΩ). Anche se in questo tipo di configurazione non è possibile avere una comunicazione bidirezionale, è possibile ad esempio sfruttarla per video-conferenze o simili.
Figura B.9 Connessioni in configurazione multi-drop
Nella tabella seguente si riportano le differenze tra i parametri caratteristici di trasmissione per le interfacce RS232 e RS422; e nella figura B.10 si mostra il confronto tra le capacità di velocità di trasmissione dati e la relativa lunghezza di trasmissione.
SPECIFICATIONS RS232 RS422
Mode of Operation -ENDED SINGLE DIFFERENTIAL Total Number of Drivers and Receivers on One Line (One driver
active at a time for RS485 networks)
1 DRIVER
1 RECVR 10 RECVR 1 DRIVER Maximum Cable Length 50 FT. 4000 FT. Maximum Data Rate (40ft. – 4000ft. for RS422/RS485) 20kb/s 10Mb/s-100Kb/s Maximum Driver Output Voltage +/-25V -0.25V to +6V Driver Output Signal Level (Loaded Min.) Loaded 15V +/-5V to +/- +/-2.0V Driver Output Signal Level (Unloaded Max) Unloaded +/-25V +/-6V Driver Load Impedance (Ohms) 3k to 7k 100
Max. Driver Current in High Z State Power On N/A N/A Max. Driver Current in High Z State Power Off +/-2v +/-6mA @ +/-100uA Slew Rate (Max.) 30V/uS N/A Receiver Input Voltage Range +/-15V -10V to +10V Receiver Input Sensitivity +/-3V +/-200mV Receiver Input Resistance (Ohms), (1 Standard Load for RS485) 3k to 7k 4k min.
Figura B.10 Confronto tra le interfacce RS232, RS423 e RS485 per le capacità in relazione al rapporto tra la lunghezza dei cavi di collegamento ed il corrispondente data rate
Figura B.11 Porta seriale RS-422
B.4 TIA/EIA-644 (LVDS)
La tecnologia LVDS (Low Voltage Differential Signaling) è un’interfaccia fisica standard per applicazioni general purpose che permette il trasferimento di dati ad alta velocità (>155.5 Mbs) e a bassa potenza di alimentazione, sfruttando una trasmissione di dati di tipo differenziale e seriale.
Lo standard riguardo gli LVDS è stato approvato nel 1996 col termine ANSI/TIA/EIA-644.
L’obiettivo dello standard è stato quello di sviluppare un protocollo che permettesse la trasmissione di dati ad alta velocità, basso rumore, basse interferenze elettromagnetiche e basso consumo.
Già il nome Low Voltage Differential Signaling indica che la modalità di trasmissione dati è di tipo differenziale e con segnali di bassa ampiezza.
LVDS sono utilizzati nei collegamenti point-to-point per comunicazione ad alta velocità. È anche possibile utilizzarli in configurazione multi-drop facendo però attenzione alla configurazione del carico: i cavi di collegamento devono essere abbastanza corti e ciascun ricevitore deve essere direttamente connesso al driver.
La figura B.12 mostra una connessione tipica tra un trasmettitore ed un ricevitore LVDS.
Figura B.12 Tipica connessione con drivers e receivers LVDS
Il driver genera un voltaggio differenziale su un carico di 100 Ω con un range tra i 247 mV ed i 454 mV ed un offset tipico di 1.2 V rispetto a massa (vedi figura B.13).
Figura B.13 Caratteristiche elettriche per un driver ed un receiver LVDS
Molti drivers sono implementati in current-mode in modo che il consumo di potenza sia virtualmente indipendente dalla frequenza: si può quindi, utilizzando bassi voltaggi di swing (tipicamente di 350 mV), scambiare dati ad elevati rates. Queste due caratteristiche (lo swing a basso voltaggio e la corrente costante) permettono agli LVDS di operare ad alti data rates mantenendo bassa la dissipazione di potenza.
Devices di ultima generazione hanno permesso di avere rates di trasferimento dell’ordine di molti Gbps (1.923 Gbit/s).
La tecnologia LVDS ha perciò superato gli standard precedenti (TIA/EIA-422 e 485) per quanto riguarda il signaling rate. Nella figura B.14 si può vedere il grafico che definisce la distanza di trasmissione di un segnale in funzione della velocità di trasmissione.
In figura B.15 si mostra la corrente di alimentazione in funzione della frequenza con un confronto tra un protocollo RS422 e un dispositivo di tipo LVDS. Si può notare come la corrente per LVDS sia nettamente inferiore e come cresca in modo molto meno netto in funzione della frequenza.
Figura B.15 Confronto tra la variazione della corrente di alimentazione in funzione della frequenza per un protocollo di comunicazione RS422 e un RS644 (LVDS)
Per quanto riguarda l’immunità al rumore e alle interferenze elettromagnetiche valgono le stesse considerazioni fatte nel paragrafo precedente per quanto riguarda il tipo di collegamento con trasmissione differenziale.
B.5 IEEE-488
La semplicità costruttiva e di controllo delle interfacce basate sul protocollo RS-232 è il motivo principale per il quale esse sono state utilizzate per prime allo scopo di dotare strumenti numerici della capacità di comunicare con un’unità centrale. Si deve però ricordare che il sistema di comunicazione seriale non è stato progettato tenendo presente le caratteristiche offerte dagli strumenti di misura, quanto piuttosto in vista della connessione tra un calcolatore ed una periferica con funzionalità più limitate (ad esempio un plotter o un modem).
Ne consegue che alcuni strumenti, se collegati ad un calcolatore per mezzo di una linea seriale, non vengono sfruttati al pieno delle loro capacità, sia in termini di funzionalità disponibili, sia in termini di velocità di trasmissione.
Per superare le precedenti difficoltà sono stati proposti vari tipi di canali di interfaccia, organizzati appositamente per la gestione di strumenti di misura. Tra queste riveste un ruolo
di particolare importanza l’interfaccia IEEE 488, nota anche come protocollo GP-IB (General Purpose Interface Bus) o ancora come HP-IB, dal nome di due costruttori che hanno tra i primi aderito allo standard (Hewlett-Packard).
Il bus (GPIB) impiegato per la comunicazione permette un trasferimento dati fino a 1Mbyte/sec, e per questo lo standard è stato ridefinito con il nome “IEEE 488.1”o, per brevità, “488.1”. In questo standard si stabiliscono al solito le caratteristiche fisiche del bus di collegamento e si descrive una serie di funzioni di interfaccia che i costruttori devono implementare sui dispositivi perché questi possano utilizzare il bus nella trasmissione dei dati. Una successiva revisione dello standard ha avuto come risultato una nuova versione dello stesso, denominata IEEE 488.2. In tale nuovo insieme di norme, sono definiti anche i protocolli per la comunicazione tra i dispositivi e l’host, il formato della trasmissione dei dati sul bus ed infine sono fornite utili linee guida alla programmazione dei dispositivi.
Le componenti dello standard 488.1 sono essenzialmente un controllore (“controller”), ovvero un calcolatore dotato di interfaccia che organizza il funzionamento delle periferiche stabilendone l’accesso al bus; le periferiche, strumenti in generale autonomi in grado di effettuare misure anche senza essere pilotati da remoto, ma dotate anche di interfaccia; le schede di interfaccia ed il bus di collegamento (GPIB), che opera con 24 linee (24 pin).
Il protocollo prevede al massimo la connessione tra 15 dispositivi, con lunghezza massima per singolo collegamento di 2 m, e lunghezza totale massima di 20 m: i limiti sono legati alla richiesta del raggiungimento delle massime prestazioni di velocità di trasferimento dati. C’è anche da aggiungere che le limitazioni nella distanza sono solo apparenti, dato che sul mercato esistono degli opportuni dispositivi (“reapeter”) che danno la possibilità di realizzare collegamenti più lunghi.
La connessione tra i vari dispositivi può avere una distribuzione lineare, a stella o mista lineare e a stella (figura 16).
Figura B.16 Modalità di connessione dei dispositivi nello standard IEEE 488
L’accesso al bus avviene secondo il modello a “tavola rotonda”, cioè c’è un moderatore (il “controller”) che in ogni istante decide chi può parlare (un unico “talker” sul bus) e chi ascolta (uno o più possibili “listener” che leggono dal bus).
Il bus a 24 linee comprende, da un punto di vista logico, un bus dati ed uno di controllo, dato che la comunicazione avviene in maniera asincrona e necessita perciò di una scansione di inizio e fine procedura, fissate rigorosamente dallo standard e che richiedono l’utilizzo di tre segnali di “handshaking” presenti sul control-bus.
Delle 24 linee del cavo di collegamento 8 sono utilizzate come linee dati (Data I/O), 8 come linee di controllo, una come riferimento dei potenziali per i vari segnali ed una è usata come linea di sicurezza per il collegamento a terra degli involucri degli strumenti. Le restanti 6 linee realizzano una parziale funzione di schermo per attenuare gli effetti dei rumori di varia origine, che possono alterare l’informazione trasmessa. La funzione di protezione è ottenuta avvolgendo ognuna di queste restanti linee con una linea del control bus in modo da ridurre in particolare i flussi e le forze elettromotrici concatenate.
Nella figura 17 e 18 si illustrano rispettivamente lo schema generale del bus e la disposizione dei 24 pin nel connettore.
Figura B.16 Schema generale del bus di comunicazione 488
Figura B.17 Disribuzione dei pin nel connettore 488
La disposizione dei canali è stata scelta in modo da tener conto di alcuni accorgimenti: le linee del control bus, che richiedono una maggiore affidabilità di trasmissione, sono collocate in prossimità della linea utilizzabile come schermo; le linee utilizzate come riferimento dei potenziali o per sicurezza sono poste ad un’estremità del connettore in modo da attenuare l’effetto che le correnti in esse circolanti possono avere sulle altre linee del bus; le linee non schermate si trovano ad una distanza maggiore dalla linea di massa, fonte probabile di disturbi.
Nello standard 488.1 sono utilizzati livelli di tensione compatibili TTL e viene adottata una logica negata, ovvero al livello di tensione alto (H), inteso superiore a 2.4 V, si attribuisce il valore logico 0 (False), mentre ad una tensione inferiore a 0.8 V si attribuisce il valore logico1 (True). Il motivo della scelta sta nel fatto che in alcuni trasmettitori è imposta una struttura “open collector”, in cui è necessario che un segnale sia attivo quando si trova a livello logico basso.
Il flusso di informazioni tra diversi componenti (ad esempio un PC con più strumenti connessi al bus) necessita di un sistema di indirizzamento per scambiare messaggi destinati a tutti i dispositivi (Universal Multiline Commands) o ad un dispositivo in particolare (Addressed Commands). Ad ogni dispositivo connesso al bus 488 (scheda di interfaccia compresa) è associato un indirizzo univoco, impostabile dal pannello frontale o posizionando opportunamente gli switch presenti sul retro dello strumento.
L’indirizzo, come le informazioni sul bus dati, è espresso secondo il codice ASCII a 7 bit: i 5 meno significativi rappresentano l’indirizzo primario (primary address), quindi con valori da 0, che in genere è assegnato al controller, a 30 (il 31, cioè la configurazione 11111, è riservato); il bit più significativo è sempre posto a 0; il controller setta poi il bit TA se vuole indirizzare il dispositivo come talker o setta il bit LA se vuole indirizzare il dispositivo come listener; è possibile anche settare entrambi i bit TA e LA per avere un dispositivo con contemporaneamente il ruolo di listener e talker. Il protocollo permette anche l’aggiunta di un indirizzo secondario, da poter utilizzare nel caso di strumenti organizzati con sottounità interne.
Il controller si occupa di gestire il flusso delle informazioni spedendo i comandi ai diversi dispositivi e decidendo, in ogni istante, quale dispositivo talker possa trasmettere i dati e quali dispositivi listener possano riceverne. Alcune configurazioni del bus 488 non necessitano della presenza del controller perché di solito è presente un unico dispositivo che può trasmettere dati, mentre tutti gli altri possono solo riceverne.
Il già menzionato protocollo di “handshaking”, che è un “pre-dialogo” tra i dispositivi, consente di coordinare il trasferimento dei dati lungo il bus dati dalla sorgente (talker o controller) al destinatario/i (uno o più listener), assicurandone la correttezza. A differenza di un normale bus dati interno ad un computer, infatti, il bus 488 non impone ai dispositivi specifiche temporali riguardo i segnali mandati sul bus. Questo permette di connettere al bus anche dispositivi che presentano velocità di dati molto differenti. La gestione particolare delle linee di handshaking consente che un trasmettitore che vuole inviare informazioni a più ricevitori contemporaneamente, regoli in modo automatico la velocità di scrittura sul bus in modo che il dispositivo più lento sia comunque in grado di ricevere correttamente i dati inviati sul bus stesso. Per fare questo nel protocollo sono previste tre linee di handshake: Data Valid (DAV), Not Ready For Data (NRFD) e Not Data Accepted (NDAC). La prima segnala la presenza di informazione sulla linea dati; la seconda dichiara la possibilità di un dispositivo di accettarli e la terza è utilizzata per segnalare l’accettazione dei dati da parte dei dispositivi.
Cinque linee del bus sono utilizzate per gestire un generico flusso di informazioni degli strumenti e del controller. La IFC (Interface Clear), la REN (Remote Enable) e la ATN (Attentino) sono pilotate solo dal controller; la SRQ (Service Request) è attivata dalle periferiche ed è una linea di input per il controller; la EOI (End Or Identify) può essere comandata sia dal controller che dai talker.