Il Sistema satellitare GPS
L’anno 1973 rappresenta il punto di partenza del progetto NAVSTAR – GPS
(NAVigation System for Timing and Ranging – Global Positioning System), che darà vita ad uno dei sistemi di navigazione satellitare, ancora attivo al giorno d’oggi (più comunemente indicato con l’acronimo GPS).
In questo anno, infatti, il Department of Defense (DoD) degli Stati Uniti d’America istituisce un Joint Program Office (JPO) con il compito di dar vita al progetto di un nuovo sistema di navigazione satellitare, il Defense Navigation Satellite System (DNSS), che prevede il coinvolgimento di tutte le forze armate, vale a dire Marina, Esercito ed Aviazione ([1]).
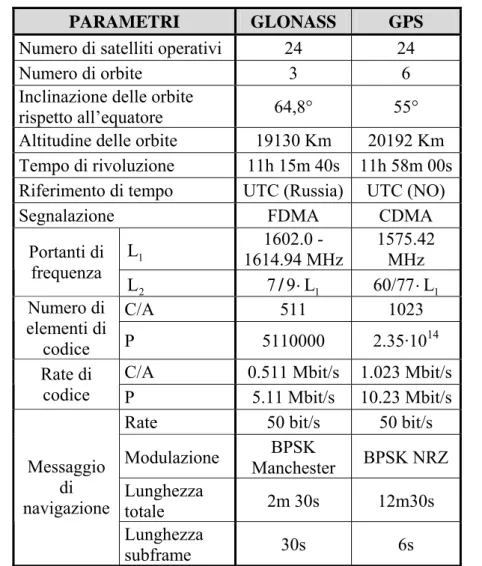
Non è un caso che tale progetto sia sorretto da forti stimoli provenienti dal mondo militare: siamo in piena Guerra Fredda e, a dimostrazione del fatto che un sistema del genere fosse una potente arma strategica, nello stesso periodo anche l’Unione Sovietica decide di mettere a punto il GLONASS (GLObal NAvigation Satellite System)1, sistema satellitare dalle prestazioni praticamente identiche a quelle offerte dal GPS. In Tab. 1.1 è riportato un breve e sintetico confronto tra il GPS e il GLONASS riguardo solo ad alcuni dei parametri più importanti. Il significato dei campi verrà chiarito durante la trattazione del sistema GPS.
1 La sigla russa è ГЛОНАСС - Глобальная Навигационная Спутниковая Система (Glonass –
Tab. 1. 2 – Breve confronto tra i sistemi satellitari GLONASS e GPS
Nei primi anni ’60, alcune importanti organizzazioni governative degli Stati Uniti, tra cui l’Esercito, la NASA(National Aeronautics and Space Administration) ed il DoT (Department of Transportation), si interessano allo sviluppo di un sistema di posizionamento satellitare, il cui requisito principale era quello di offrire una copertura globale della superficie terrestre, attiva 24 ore su 24 indipendentemente dalle condizioni atmosferiche ed in grado di servire utenti fortemente dinamici con un alto grado di accuratezza.
Il primo esperimento a prendere vita è il cosiddetto Transit (1959), frutto della collaborazione tra la Marina e l’Applied Physics Laboratory (APL),
PARAMETRI GLONASS GPS
Numero di satelliti operativi 24 24
Numero di orbite 3 6
Inclinazione delle orbite
rispetto all’equatore 64,8° 55°
Altitudine delle orbite 19130 Km 20192 Km Tempo di rivoluzione 11h 15m 40s 11h 58m 00s Riferimento di tempo UTC (Russia) UTC (NO)
Segnalazione FDMA CDMA
1 L 1614.94 MHz1602.0 - 1575.42 MHz Portanti di frequenza 2 L 7 9 L/ ⋅ 1 60/77 L⋅ 1 C/A 511 1023 Numero di elementi di codice P 5110000 2.35·1014
C/A 0.511 Mbit/s 1.023 Mbit/s Rate di
codice P 5.11 Mbit/s 10.23 Mbit/s
Rate 50 bit/s 50 bit/s
Modulazione Manchester BPSK BPSK NRZ Lunghezza totale 2m 30s 12m30s Messaggio di navigazione Lunghezza subframe 30s 6s
originariamente destinato a scopi militare, ma reso poi disponibile anche ai civili nel 1967, i cui contributi maggiori sono da ricercarsi nel campo degli algoritmi di predizione della posizione dei satelliti. Un altro precursore del sistema GPS è il cosiddetto Timation (1964), programma sempre appoggiato dalla Marina, le cui innovazioni consistono soprattutto nell’impiego di orologi atomici a bordo dei satelliti.
Contemporaneamente, l’Aeronautica da il via ad un progetto simile, denominato System 621B (1963), che prevede una navigazione su tre dimensioni (a differenza dei precedenti, che si limitavano a latitudine e longitudine) attraverso l’impiego di segnali radio modulati con un codice pseudocasuale, detto PseudoRandom Noise (PRN); negli stessi anni l’Esercito propone un proprio sistema, il cosiddetto SECOR (SEquence Correlation Of Range).
Allo scopo di non disperdere le energie nei vari programmi, è nel 1968 che il DoD decide di istituire un comitato congiunto, chiamato NAVSEG (NAVigation Satellite Executive Group), con il compito di mettere a punto tutte le specifiche, tra le quali, per citare le più importanti, costellazione dei satelliti, modulazione e tecnica di accesso multiplo, al fine di dar vita a quello che, cinque anni dopo, diventerà il sistema NAVSTAR – GPS.
Tale programma entra nel vivo a partire dal 1969, quando la Rockwell International è scelta per fabbricare i primi satelliti GPS; il primo lancio si ha già nel luglio 1974, ma occorre attendere altri quattro anni per il lancio del primo degli 11 satelliti appartenenti al Block I, completato nel 1985 e destinato a testare l’intero
sistema. Nel febbraio 1989 iniziano i lanci dei 28 satelliti Block II dei quali 24
operativi e 4 riservati ad eventuali sostituzioni, che daranno vita alla costellazione di satelliti operativi e che si concluderanno nel 1994; è allora che il Comandante della Federal Aviation Administration (FAA), David Hinson, dichiara operativo il sistema GPS.
Fino ad oggi, il sistema non ha subito sostanziali modifiche, se si escludono alcuni miglioramenti, come la rimozione del disturbo Selective Availability (SA)2,
avvenuta nel maggio 2000, ed il potenziamento della costellazione, grazie al lancio dei satelliti BLK IIA (Fig. 1.1)eBLK IIR, di nuova generazione3.
Fig. 1. 1 – Satellite BLK IIA ([2])
Il sistema GPS è un sistema di posizionamento satellitare che consente una misura della posizione dell’utente nelle tre coordinate spaziali (latitudine, longitudine e altitudine) e del tempo UTC (Universal Coordinated Time)4 con una copertura globale e continua e con un grado di accuratezza che varia a seconda del tipo di utenti. Inoltre è possibile ricavare altre grandezze, (se richieste), quali
3 Tali satelliti, prodotti da Martin Marietta, garantiscono una maggiore affidabilità dal punto di vista
dell’autonomia in assenza di correzioni inviate dalle stazioni di controllo
4 Il sistema GPS fornisce il tempo nel proprio formato, che differisce da quello UTC per alcuni secondi;
tale correzione, però, è resa possibile dai messaggi trasmessi dal sistema stesso
velocità, direzione, accelerazione ed altro ancora. Ovviamente la precisione sarà limitata da tutta una serie di sorgenti di errori inevitabili (e che verranno descritte in seguito), ma soprattutto dal tipo di ricevitore utilizzato la cui qualità influisce sulle prestazioni complessive.
Sono previste due classi di utenza: gli utenti militari, che fruiscono del Precise Positioning Service (PPS), e gli utenti civili, che sfruttano lo Standard Positioning Service (SPS)5.
La differenza in termini di prestazioni tra PPS e SPS è ottenuta artificialmente tramite i meccanismi di crittografia: Selective Availability (SA) e di Anti-Spoofing (AS). Il primo consiste nell’introduzione voluta di errori aggiuntivi sui parametri di navigazione (rimossa dal DOD dal maggio 2000, ma con riserva di riattivazione in
caso di necessità senza preavviso). Questo tipo di disturbo serve per negare una piena accuratezza all’utente SPS, mentre non ha effetti su utenti PPS in quanto possiedono gli elementi per eliminare questa crittografia del segnale. Il secondo è attivato per evitare tentativi di jamming da parte di utenti non autorizzati, cioè serve a far in modo che nessun possa inviarci repliche del codice proveniente dai satelliti con l’intento di ingannare il ricevitore.
Il sistema, per come è stato strutturato, non prevede alcuna limitazione al numero di utenti: i ricevitori (User Segment, US), infatti, operano in maniera passiva, decodificando i messaggi che vengono trasmessi in modalità broadcast dai satelliti che compongono lo Space Segment (SS), i quali vengono monitorati costantemente dall’Operational Control Segment (OCS)6.
Il concetto su cui si basa il funzionamento del GPS è lo stesso che venne impiegato, per la prima volta sfruttando segnali radio, dal sistema di radionavigazione marino LORAN (LOng Range Aid to Navigation), usato durante la
II Guerra Mondiale.
5 Il Precise Positioning Service garantisce un’accuratezza di almeno 22 m sul piano orizzontale e 27.7
m su quello verticale, con un errore massimo di 0.2 m/sec per la velocità e di 200 nsec rispetto al tempo UTC, mentre lo Standard Positioning Service assicura una precisione di 100 m sul piano
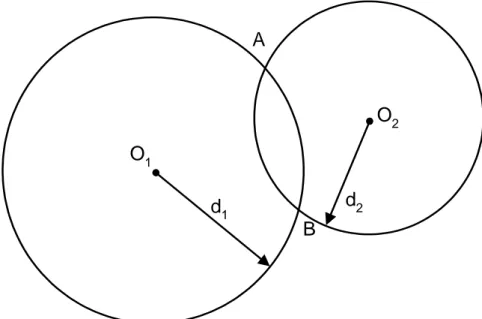
Tale meccanismo è pero noto ai navigatori fin dal tardo Medio Evo e può essere illustrato attraverso un esempio analogo per le due dimensioni (Fig. 1.2), riportato in [3]. O1 O2 d2 d1 A B
Fig. 1. 2 – Misura della posizione mediante due sirene da nebbia
Supponendo di conoscere i centri O1 e O2 ed i raggi d1 e d2 di due cerchi, è
possibile risalire ai due soli punti di intersezione tra questi, A e B; se si dispone poi di informazioni aggiuntive che consentono di escludere uno dei due, è allora noto l’unico punto a comune. Questa situazione può essere applicata ad un contesto solo apparentemente distante: supponiamo il caso di un marinaio che intenda stabilire la propria posizione calcolando il tempo in cui percepisce il fischio emesso da due sirene da nebbia; supponendo che conosca la posizione esatta delle due sirene (O1 e
O2) e che sia perfettamente sincronizzato con esse, e che queste siano a loro volta
sincronizzate tra loro, è quindi in grado di risalire alle distanze d1 e d2 moltiplicando i
tempi di propagazione dei segnali emessi per la velocità di propagazione del suono. Se si prendesse in considerazione una sola sirena, il marinaio si potrebbe trovare su un qualsiasi punto della circonferenza di centro O1 o O2 mentre considerando le due
sirene insieme il nostro marinaio si può trovare nei punti di intersezione delle due circonferenze: ovvero in A o B. È chiaro che per eliminare l’ambiguità tra le
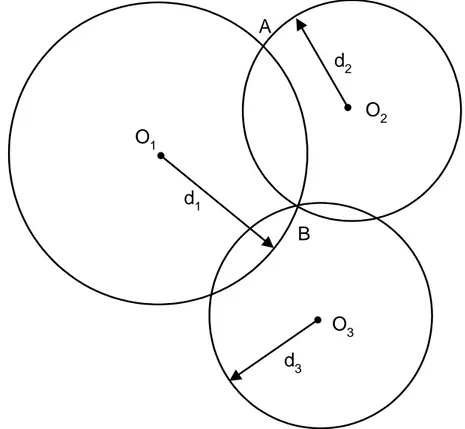
posizioni (nel caso delle due sirene) A e B basta avere una terza sirena di centro O3 e
risalire alla distanza d3 come per d2 e d1 . A questo punto l’intersezione delle tre
circonferenze identifica il solo punto B (Fig 1.3) cioè la posizione del nostro marinaio. O1 O2 O3 A B d1 d2 d3
Fig. 1. 3 – Misura della posizione mediante tre sirene da nebbia
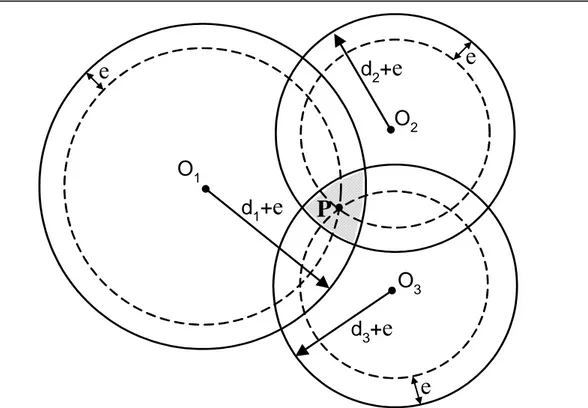
Eliminando l’ipotesi assai poco plausibile che il marinaio sia sincronizzato con le tre sirene da nebbia, i tempi di arrivo risultano affetti da un errore ε, che, ritenendo ancora valida l’ipotesi che il sistema sia sincronizzato, risulta essere uguale per i tre i tempi di arrivo (Fig 1.4). Come si può notare l’effetto dell’errore ε confina le possibili posizioni del marinaio entro la zona tratteggiata e applicando un algoritmo iterativo che tenga conto di questo errore ε, è possibile ridurre tale incertezza ed ottenere la posizione effettiva P.
O
1O
2O
3d
2+
e
d
3+
e
d
1+
e
e
e
e
P
Fig. 1. 4 – Misura della posizione con errore di sincronizzazione
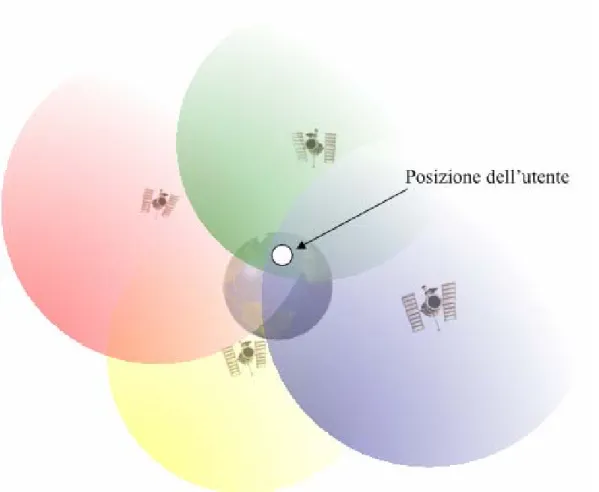
Estendendo l’esempio alle tre dimensioni, il concetto di cerchio si traduce in quello di sfera: a questo punto, si rende necessario l’impiego di quattro sfere, come illustrato in Fig 1.5.
Ogni satellite illumina la porzione di superficie visibile dalla propria posizione, istante per istante, con un segnale dal quale vengono derivate a terra 2 informazioni fondamentali:
1) Posizione del satellite stesso nell’istante di trasmissione, riferita rispetto ad un sistema di assi noto.
2) Istante di trasmissione.
Nel nostro caso, il centro di ciascuna sfera è rappresentato dalla posizione di ogni satellite ricevuto, che può essere ottenuta mediante i dati relativi alle effemeridi trasmesse dal satellite stesso, mentre il raggio è calcolato misurando i tempi di interarrivo dei segnali e moltiplicandoli per la velocità della luce.
Fig. 1. 5 – Misura della posizione nelle tre coordinate spaziali con errore di sincronizzazione
La posizione del satellite e tale distanza, rispettivamente come centro e raggio, definiscono una sfera immaginaria la cui superficie rappresenta tutti i punti possibili della nostra posizione. In questo modo otteniamo 4 sfere immaginarie che, non potendo essere concentriche, hanno come unico punto a comune la nostra posizione. Quindi per ottenere un solo punto possibile e stabilire cioè la nostra esatta posizione, occorre ricevere 4 segnali indipendenti da 4 diversi satelliti e calcolarci le 4 incognite: latitudine, longitudine, altitudine e tempo7.
Un ricevitore GPS si può ricondurre alla situazione appena descritta decodificando i messaggi provenienti da ciascun satellite, trasmessi su due portanti, dette L1 e L2, poste rispettivamente a 1575.42 MHz e 1227.6 MHz, su una banda complessiva larga approssimativamente 20.46 MHz e impiegando, come tecnica di
accesso multiplo, il Code Division Multiple Access (CDMA). Ciascun satellite, infatti, trasmette utilizzando un proprio codice, detto PseudoRandom Noise (PRN), che va a sommarsi in modulo 2 ai dati.
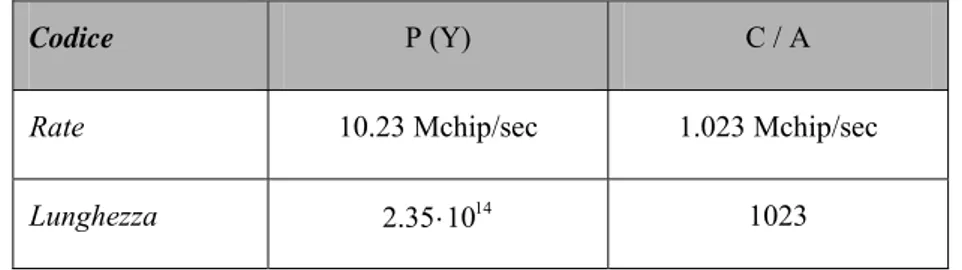
Come avevamo già anticipato, il sistema GPS offre due modalità di servizio, PPS e SPS, che si distinguono sulla base dei codici usati: il codice destinato agli utenti autorizzati (militari), detto P (Precision), che diventa Y quando è attiva la cifratura dovuta alla modalità di Anti-Spoofing, ha un rate trasmissivo di 10.23 Mchip/sec ed una durata pari ad una settimana, mentre il codice utilizzato dagli utenti civili, che non prevede alcuna restrizione d’uso, è un codice di Gold, detto C/A (Coarse Acquisition), di durata pari a 1023 simboli e rate pari a 1.023 Mchip/sec (Tab. 1.2).
Codice P (Y) C / A
Rate 10.23 Mchip/sec 1.023 Mchip/sec
Lunghezza 2.35 10⋅ 14 1023
Tab. 1. 2 – Caratteristiche dei codici PRN
Il codice P(Y), che può essere ricostruito solo da parte di utenti autorizzati, va a modulare i dati su entrambe le portanti, mentre il codice C/A viene trasmesso solo sulla portante L18.
La modulazione utilizzata è di tipo BPSK e viene applicata al risultato
dell’operazione di somma modulo 2 tra i dati, che fluiscono con un bitrate di 50 bit/sec, ed i chip dei codici, modulati in quadratura. Il segnale sL i1, ( )t , relativo al satellite i-esimo, inviato sulla portante L1 è pertanto nella forma
[
]
(
)
[
]
(
)
1, ( ) ( ) ( ) cos 2 1 2 ( ) ( ) sin 2 1
L i i i L i i L
s t = ⋅A P t ⊕D t ⋅ π f t+ϕ + A G t⋅ ⊕D t ⋅ π f t+ϕ dove A è l’ampiezza del segnale in fase, D t è la sequenza di dati a 50 bit/sec, i( )
( )
i
P t è il codice P(Y) dell’i-esimo satellite, ( )G t è il codice C/A dell’i-esimo i
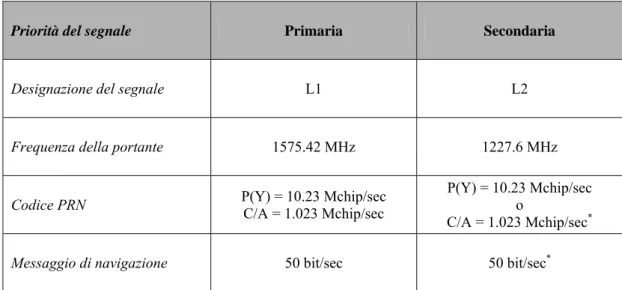
satellite, f è la frequenza della portante L1 e L1 ϕ è la fase iniziale. La struttura generale del segnale GPS è riassunta in Tab. 1.3.
Priorità del segnale Primaria Secondaria
Designazione del segnale L1 L2
Frequenza della portante 1575.42 MHz 1227.6 MHz
Codice PRN P(Y) = 10.23 Mchip/sec C/A = 1.023 Mchip/sec
P(Y) = 10.23 Mchip/sec o
C/A = 1.023 Mchip/sec*
Messaggio di navigazione 50 bit/sec 50 bit/sec*
*Il codice solitamente usato su L2 è il codice P(Y); il messaggio di navigazione a 50 Hz è in genere modulato con il codice P(Y), ma può essere tolto dal segmento di controllo per aumentare le prestazioni di jamming. Ci sono tre possibilità: codice P(Y) con dati, codice P(Y) senza dati, codice C/A con dati
Tab. 1. 3 – Struttura del segnale GPS
Nella Fig 1.6 è riportato un esempio di schema a blocchi del trasmettitore del segnale SPS. codice C/A Orologio atomico Derivazione frequenza base 10,23 MHz 1575,42 MHz or esclusivo Generatore di portante L1 Divisore di frequenza Generatore di impulsi 50 Hz Generatore di codice C/A Modulatore BPSK Modulatore dati 1 Bit = 20 ms Bit 0/1 50 Hz Dati 50 Hz antenna : 10 x 154 : 204600 1,023 MHz 1,023 MHz Portante L1 PRN 1575,42 MHz
Da quanto sopra esposto è chiaro che la comunicazione satellite-ricevitore è unidirezionale e che il ricevitore GPS, in tal senso, è uno strumento passivo. Non potrebbe essere altrimenti, date le dimensioni ridotte ed il basso costo del ricevitore, paragonate alla grande distanza tra utente e satellite.
Altra osservazione che può essere fatta è che non possono essere utilizzate, in questo tipo di trasmissioni, informazioni trasportate da onde riflesse; deve necessariamente essere disponibile il raggio LOS (Light Of Sight).
1.2.1. Il sistema di riferimento Geodetico
Cerchiamo di chiarire anche se non in maniera approfondita9 alcuni concetti relativi al sistema di riferimento che viene tipicamente usato in un ricevitore GPS.
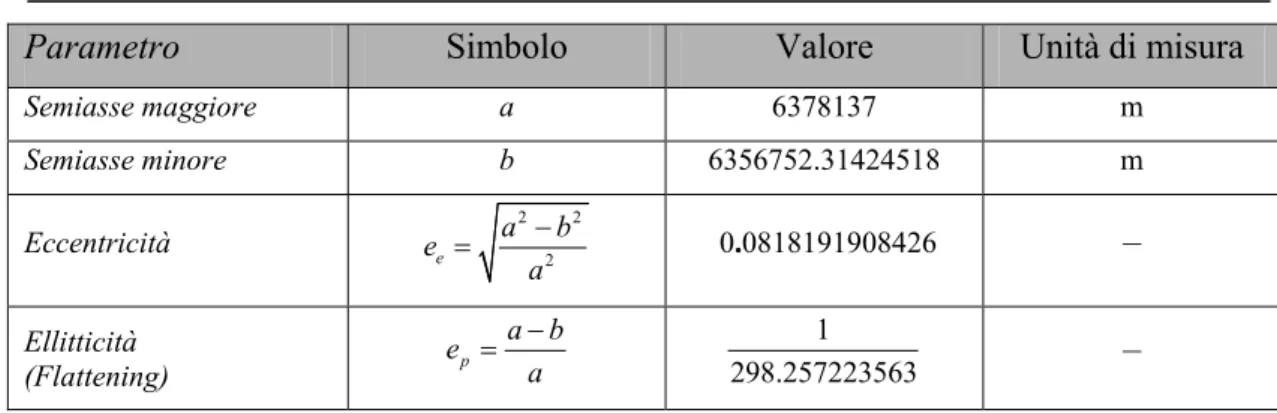
Generalmente, la posizione di un punto sulla superficie terrestre è individuata da una terna di coordinate geodetiche, vale a dire latitudine, longitudine ed altitudine. La longitudine λ , che tipicamente si indica in gradi attribuendo il segno positivo alla direzione Est, misura l’angolo compreso tra il meridiano di riferimento (Greenwich) e la retta che unisce il centro della Terra con la proiezione del punto sul piano equatoriale. La definizione delle altre due coordinate richiede, invece, alcune considerazioni sulla forma della superficie terrestre. La Terra, infatti, a causa delle attrazioni gravitazionali esercitate principalmente dal Sole e dalla Luna, presenta una forma che non può essere approssimata in maniera accurata da un solido facilmente manipolabile in fase di calcolo e per la quale, nel 1873, il matematico tedesco J. B. Listing coniò il termine geoide. Esistono molti standard utilizzati per approssimare la superficie terrestre ([4]), ma quello di gran lunga più usato è il cosiddetto WGS-84 (World Geodetic System – 1984), che approssima il geoide con una ellissoide (Fig. 1.7), le cui caratteristiche sono riportate in Tab. 1.4.
Parametro Simbolo Valore Unità di misura Semiasse maggiore a 6378137 m Semiasse minore b 6356752.31424518 m Eccentricità 2 2 2 e a b e a − = 0.0818191908426 – Ellitticità (Flattening) p a b e a − = 1 298.257223563 –
Tab. 1. 4 – Grandezze utilizzate nello standard WGS-84
Fig. 1. 7 – Ellissoide geocentrico di riferimento nello standard WGS-84
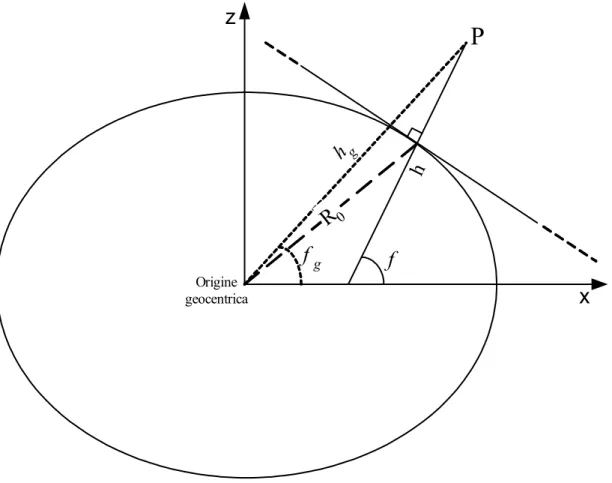
La Fig. 1.8, in virtù della simmetria del problema, mostra una sezione dell’ellissoide WGS-84, in cui sono indicate la latitudine ϕ e la altitudine h, di tipo geodetico, che si differenziano dalla latitudine ϕg e dall’altitudine hg, di tipo geocentrico, che avrebbero senso se la Terra fosse di forma perfettamente sferica.
La latitudine geodetica ϕ, che tipicamente si misura in gradi con segno positivo nella direzione Nord, è definita, come si può notare in Fig. 1.8, come l’angolo tra il vettore passante per il punto P e normale alla superficie dell’ellissoide e la sua proiezione sul piano equatoriale, mentre l’altezza geodetica h è semplicemente la distanza minima tra P e l’ellissoide di riferimento (misurata in metri).
h
gf
gf
P
h
Origine geocentricaR
0x
z
Fig. 1. 8 – Sezione dell’ellissoide sul piano xz
Allo scopo di misurare e determinare le orbite dei satelliti GPS, però, sarebbe più conveniente usare un sistema di coordinate di tipo Earth-Centered Inertial (ECI), poiché sarebbero di immediata applicazione le leggi di Newton cui obbediscono le orbite dei satelliti. Senza entrare nel dettaglio10, un sistema di tipo ECI si rivelerebbe
vantaggioso perché, rispetto ai satelliti in movimento, risulterebbe non accelerato.
Nella pratica, però, per far fronte alle caratteristiche del ricevitore, il sistema di riferimento più appropriato da usare per il calcolo della posizione di un utente GPS è un sistema cartesiano di coordinate che ruota solidale con la Terra, noto come il sistema Earth-Centered Earth-Fixed (ECEF). Nel sistema ECEF il piano xy coincide con il piano equatoriale terrestre, con gli assi +x e +y orientati rispettivamente nelle direzioni a 0° e 90°E di longitudine e l’asse +z normale al piano equatoriale, orientato verso il Polo Nord.
A questo punto occorre trovare le relazioni che legano il sistema di riferimento ECEF al sistema di riferimento geodetico, che usa latitudine, longitudine ed altitudine.
Se il globo terrestre avesse una forma perfettamente sferica (Fig. 1.9), con raggio rE, varrebbero le relazioni
2 2 2 r= x +y +z (1.1) 2 2 arctan g z x y ϕ = ⎛⎜⎜ ⎞⎟⎟ + ⎝ ⎠ (1.2) arctan g y x λ = ⎛ ⎞⎜ ⎟ ⎝ ⎠ (1.3) g E h = − (1.4) r r
dove x, y, z sono le coordinate del punto P nel sistema ECEF, r è la distanza di P dal centro della Terra e ϕg, λg e h sono le coordinate geodetiche di P. g
Approssimando, però, la superficie con l’ellissoide standardizzato nel WGS-84, le relazioni inevitabilmente cambiano, fatta eccezione per la longitudine geodetica: poiché essa fa riferimento alla proiezione del punto sul piano equatoriale, non dipende dalla coordinata z e quindi non risente della deformazione del solido.
Attraverso alcune manipolazioni matematiche ([6] - [7]) è possibile ottenere le seguenti relazioni, che legano le coordinate ECEFa quelle geodetiche:
(
)
2 3 2 3 2 sin 1 arctan 2 cos p p p p p e e z a e p e e a θ ϕ θ ⎡ − ⎤ + ⋅ ⋅ ⎢ − ⎥ ⎢ ⎥ = ⎢ ⎥ − − ⋅ ⋅ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ (1.5) arctan y x λ= ⎛ ⎞⎜ ⎟ ⎝ ⎠ (1.6) cos p h ν ϕ = − (1.7)dove il raggio di curvatura ν e le grandezze ausiliarie p e θ sono calcolate come
2 2 1 e sin a e ν ϕ = − ⋅ (1.8)
2 2 p= x +y (1.9)
(
)
arctan 1 p z p e θ = ⎡⎢ ⎤⎥ ⋅ − ⎢ ⎥ ⎣ ⎦ (1.10)in cui a, e e e e sono le quantità definite in Tab. 1.4. p
Analogamente, è possibile ricavare le relazioni inverse, che consentono di trasformare le coordinate geodetiche in coordinate ECEF:
(
)
cos cos x= ν + ⋅h ϕ⋅ λ (1.11)(
)
cos sin y= ν + ⋅h ϕ⋅ λ (1.12)(
1 2)
sin e z=⎡⎣ν ⋅ −e +h⎤⎦⋅ ϕ (1.13)dove a e e sono le quantità riportate in Tab. 1.4 e ν è definita nella (1.8). e
1.2.2. Il calcolo della posizione mediante gli pseudorange
Il concetto fondamentale, alla base del calcolo della posizione di un utente, come descritto brevemente nel Par. 1.2, richiede la ricezione dei segnali provenienti da almeno quattro satelliti: conoscendo infatti la posizione di ciascun satellite nel sistema di coordinate ECEF e misurando la distanza tra satellite ed utente, è possibile ottenere la posizione dell’utente.
Questa formulazione risulta però problematica, non tanto nel calcolo della posizione dei satelliti, quanto piuttosto nella valutazione della distanza satellite-utente.
La misurazione, infatti, necessariamente di tipo indiretto, si basa sulla differenza temporale tra istante di partenza, che corrisponde al tempo di trasmissione del satellite, ed istante di arrivo, che coincide con il tempo in cui il dispositivo riceve il messaggio; moltiplicando questo intervallo per la velocità di propagazione del segnale, pari a quella della luce c=2.99792458 10⋅ 8 m/sec (W
stimare la distanza che divide l’utente dal trasmettitore11. Per la verità, questa affermazione risulterebbe vera solo se il ricevitore fosse perfettamente sincronizzato con il sistema, con una precisione altissima12; questa richiesta è ovviamente impensabile, per cui è opportuno parlare, piuttosto che di range misurato, di pseudorange.
Nonostante questo errore “fisiologico”, comunque recuperabile in maniera piuttosto accurata tramite un algoritmo ricorsivo, subentrano altre perturbazioni che analizzeremo nel Par 1.5. Adesso vediamo come è possibile calcolare la posizione dell’utente sfruttando le misure degli pseudorange.
In Fig. 1.10 è illustrata la situazione ideale alla quale ci troveremmo di fronte nel caso in cui il ricevitore fosse perfettamente sincronizzato con il sistema: s rappresenta il vettore del satellite nelle coordinate ECEF, u è il vettore posizione dell’utente (incognito), mentre r è dato dalla differenza tra s e u , ovvero
r = − . s u
In questo scenario, la distanza r , equivalente a
r= r = s u− ,
può essere indirettamente misurata, attraverso l’intervallo temporale che intercorre tra istante di trasmissione ed istante di ricezione. Possiamo risalire all’istante di trasmissione tramite la decodifica del Time-Of-Week (TOW), contenuto all’interno della Hand-Over Word (HOW) di ogni subframe; il tempo GPS cui fa riferimento il TOW è l’istante di trasmissione del primo bit del successivo subframe, per cui è possibile associare al tempo di ricezione l’istante in cui tale bit giunge all’utente a terra.
11 In realtà, occorre considerare che il segnale radio attraversa l’atmosfera, composta da ionosfera e
troposfera, che presentano un indice di rifrazione del mezzo diverso da 1, per cui la velocità di propagazione è diversa da c
u s r Satellite GPS Utente Terra
Fig. 1. 10 – Rappresentazione dei vettori posizione di utente e satellite
Indicando rispettivamente con T e s T l’istante di trasmissione e l’istante di u ricezione, r risulta pari a
(
u s)
r c T= ⋅ −T = ⋅ ∆c t (1.14), dove c=2.99792458 10⋅ 8 m/sec è la velocità della luce nel vuoto (secondo lo
standard WGS-84) e ∆t Tu− è il tempo di propagazione. Ts
Il procedimento che porta alla misura del tempo di propagazione è illustrato in Fig. 1.11: il codice generato dal satellite all’istante T giunge al ricevitore s all’istante T ; all’interno del dispositivo a terra, è generato un codice identico, che u viene ritardato fino a che non risulta agganciato al segnale ricevuto. Nel momento in cui il ricevitore riesce a sincronizzarsi perfettamente con il clock del satellite, il processo di correlazione dà luogo all’effettivo tempo di propagazione, indicato in
Fig. 1. 11 – Utilizzo delle repliche del codice per determinare il tempo di propagazione
In generale, però, il clock del ricevitore presenta un certo errore rispetto al tempo del sistema in quanto sui ricevitori non abbiamo degli orologi atomici e, quindi, il clock del ricevitore non è sincronizzato con quello del trasmettitore. Inoltre, benché ciascun trasmettitore sia dotato di oscillatori basati su orologi atomici al Cesio ed al Rubidio di precisione estremamente alta, sussiste comunque un certo offset temporale rispetto al tempo mantenuto dal Control Segment.
In virtù di questo fatto, la misurazione determinata dal processo di correlazione dà luogo al cosiddetto pseudorange ρ, che si compone della distanza geometrica satellite-utente e dell’errore causato sia dall’offset presente tra il ricevitore ed il sistema che da quello esistente tra satellite e sistema. La relazione matematica che lega ρ alle suddette grandezze, è data da
(
u u) (
s s)
atmc T t T t t
ρ = ⋅⎡⎣ + − + + ∆ ⎤⎦ (1.15),
dove
s
T : tempo del sistema in cui il segnale parte dal satellite
u
T : tempo del sistema in cui il segnale raggiunge il ricevitore
s
t : offset del clock del satellite rispetto al sistema
(ts > : satellite in anticipo rispetto al sistema; 0 ts < : satellite in 0 ritardo rispetto al sistema)
u
t : offset del clock del ricevitore rispetto al sistema
(tu > : ricevitore in anticipo rispetto al sistema; 0 tu < : ricevitore in 0 ritardo rispetto al sistema)
atm
t
∆ : ritardo dovuto ai fenomeni di propagazione atmosferica
c: velocità della luce La (1.14) può essere riscritta come
(
u s atm)
r= s u− = − ⋅ρ c t − + ∆t t (1.16),
dove t , u t , s ∆tatm e c sono definiti come in (1.15).
L’offset del clock del satellite t è dato da un contributo dovuto ad un errore s sistematico e da un fenomeno di deriva: le stazioni di monitoraggio a terra (OCS) tengono sotto controllo questo errore e trasmettono i parametri correttivi al satellite, che li inserisce all’interno del messaggio e provvede a comunicarli agli utenti GPS; il calcolo per la correzione del clock del satellite può essere tranquillamente implementato dal ricevitore e nella seguente trattazione consideriamo l’errore del clock satellitare completamente compensato (ts = ). 0
Il ritardo di propagazione dovuto agli effetti dell’atmosfera ∆tatm, in maniera analoga all’offset t , può essere stimato tramite dei modelli, per cui anch’esso verrà s trascurato nel seguito (∆tatm= )0 13.
In virtù di tali ipotesi, la (1.16) diventa
u
r = s u− = − ⋅ρ c t .
Allo scopo di determinare la posizione dell’utente nelle tre dimensioni
(
x y zu, ,u u)
e l’offset del clock t , le misure degli pseudorange devono essere ueffettuate su almeno quattro satelliti, dando luogo ad un sistema di equazioni
j sj u c tu
ρ = − + ⋅ (1.17),
dove j varia da 1 al numero di satelliti disponibili N , s è il vettore posizione del j j− esimo satellite nelle coordinate ECEF, mentre gli altri elementi sono definiti come in precedenza (si noti che t non dipende dal satellite che stiamo considerando, u perché misura l’errore del ricevitore rispetto al sistema, che è lo stesso per tutti gli pseudorange).
Supponiamo per il momento di ricevere esattamente N =4 satelliti: la (1.17) si riconduce al sistema
(
) (
) (
)
(
) (
) (
)
(
) (
) (
)
(
) (
) (
)
1 1 1 2 2 2 3 3 3 4 4 4 2 2 2 1 2 2 2 2 2 2 2 3 2 2 2 4 s u s u s u u s u s u s u u s u s u s u u s u s u s u u x x y y z z c t x x y y z z c t x x y y z z c t x x y y z z c t ρ ρ ρ ρ ⎧ = − + − + − + ⋅ ⎪ ⎪ ⎪ = − + − + − + ⋅ ⎪ ⎨ ⎪ = − + − + − + ⋅ ⎪ ⎪ = − + − + − + ⋅ ⎪⎩ (1.18), dove j s x , j s y e j sz individuano la posizione del j− esimo satellite nelle tre dimensioni.
Come risulta evidente, il sistema (1.18) non è lineare; un metodo che consente di ottenere una soluzione sufficientemente accurata è quello che consiste nel linearizzare ogni equazione mediante lo sviluppo in serie di Taylor arrestato al primo ordine.
Analizziamo per il momento un generico caso monodimensionale: data una funzione non-lineare f x
( )
, nella sola variabile x, lo sviluppo in serie di Taylor è espresso da( )
( )
( )
(
)
0 0 0 1 1 ! k k k x x k d f x f x f x x x k dx ∞ = = ⎡ ⎤ = + ⎢ ⋅ ⋅ − ⎥ ⎣ ⎦∑
(1.19),dove x è il punto attorno al quale viene effettuata la linearizzazione; limitando lo 0 sviluppo al primo ordine, la (1.19) si riduce a
( )
( )
0( ) (
0 0)
f x = f x + f x′ ⋅ −x x (1.20)
il cui effetto è quello di sostituire la generica funzione f x
( )
con una retta tangente a( )
f x nel punto x , come illustrato in Fig. 1.12. 0
x y x0 f(x0 ) f(x) f( x0 ) + f ´( x0 ) ( x - x0 ) Fig. 1. 12 – Linearizzazione di f x( ) in x0
Supponiamo adesso di dover risolvere l’equazione
( )
f x = f ,
dove f x
( )
è la funzione non-lineare linearizzata mediante la (1.20), la cui soluzione, costituita dal punto x (Fig. 1.13), non appartiene alla funzione linearizzata '0 0 0
( ) ( ) ( )
x y x0 f = f( x ) x1 x2 x3 x f(x0 ) f(x1 ) f(x2 ) . . . . f(x3 )
Fig. 1. 13 – Linearizzazione iterativa di f x( )
Questo fatto comporta un errore nel calcolo della posizione, pari a
( )
1 0f x f
ε = − > ,
dove x , come si può notare in Fig. 1.13, è il punto di intersezione tra le rette 1 '
0 0 0
( ) ( ) ( )
y= f x + f x ⋅ −x x e y= . Ciò ci obbliga ad utilizzare un metodo di tipo f iterativo che consenta di far tendere la soluzione x a quella cercata i x mediante una
successione di linearizzazioni.
Analiticamente, questo procedimento consiste nel cercare la soluzione x i all’equazione
( )
i 1( ) (
i 1 i i 1)
f x− + f x′ − ⋅ x −x− = f , che dà luogo a( )
( )
1 1 1 i i i i f f x x x f x − − − − = + ′ (1.21);( )
i f f xi
ε = − ,
che consente di arrestare l’iterazione nel momento in cui l’errore εi diventa minore
di una certa soglia, in modo tale da confinare l’approssimazione all’accuratezza voluta.
È possibile estendere tali considerazioni al caso di nostro interesse, descritto dal sistema (1.18); riscriviamo, per alleggerire la notazione nelle prossime espressioni, le equazioni che lo compongono nella forma
(
) (
2) (
2)
2(
)
, , ,
j j j
j xs xu ys yu zs zu c tu f x y z tu u u u
ρ = − + − + − + ⋅ = (1.22),
in cui le coordinate x , u y , u z e l’offset u t costituiscono la posizione dell’utente e u
l’errore del clock effettivi, che rappresentano le incognite del problema. Queste possono essere scomposte in una componente approssimata ed una componente incrementale, nella forma
[ ]
[ ]
[ ]
[ ]
ˆ ˆ ˆ ˆ u u u u u u u u u u u u x x i x y y i y z z i z t t i t = + ∆ = + ∆ = + ∆ = + ∆ (1.23),dove il primo termine indica la soluzione approssimata al passo i− esimo, mentre il secondo rappresenta l’errore14.
Linearizzando la (1.22) intorno ai punti ˆ [ ]x i , ˆ [ ]u y i , ˆ [ ]u z i e ˆ [ ]u t i e u generalizzando al caso in più dimensioni la (1.20), otteniamo
(
)
(
)
(
)
ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] , , , ˆ ˆ ˆ ˆ , , , [ ], [ ], [ ], [ ] u u u u u u u u u u u u x x i u u u u u u u u u y y i u z z i t t i f x y z t f x y z t f x i y i z i t i x x == = = ∂ ≅ + ⋅ ∆ + ∂(
)
ˆ[ ](
)
ˆ [ ](
)
ˆ[ ] ˆ [ ] ˆ[ ] ˆ [ ] ˆ[ ] ˆ[ ] ˆ[ ] ˆ[ ] ˆ[ ] ˆ[ ] , , , , , , , , , u u u u u u u u u u u u u u u u u u u u u u u u u u u u x x i u u u u x x i u u u u x x i u u u y y i y y i y y i u u u z z i z z i z z i t t i t t i t t i f x y z t f x y z t f x y z t y z t y == z == t == = = = = = = ∂ ∂ ∂ + ⋅∆ + ⋅ ∆ + ⋅∆ ∂ ∂ ∂ (1.24),14 Questo metodo, di tipo iterativo, prevede l’inizializzazione della soluzione; in prima battuta
in cui l’espansione è stata troncata, per eliminare i termini non-lineari, dopo le derivate parziali di primo ordine; tali espressioni valgono
(
)
(
)
(
)
ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] [ ] , , , ˆ [ ] [ ] , , , ˆ [ ] , , , j u u u u u u u u j u u u u u u u u j u u u u u u u u s u u u u u x x i y y i u j z z i t t i s u u u u u x x i y y i u j z z i t t i s u u u u x x i y y i u z z i t t i x x i f x y z t x r i y y i f x y z t y r i z z f x y z t z = = = = = = = = = = = = − ∂ = − ∂ − ∂ = − ∂ − ∂ = − ∂(
)
ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] [ ] ˆ [ ] , , , u u u u u u u u u j u u u u x x i y y i u z z i t t i i r i f x y z t c t == = = ∂ = ∂ (1.25),avendo definito r iˆj
[ ]
come(
) (
2) (
2)
2ˆ[ ] ˆ [ ] ˆ [ ] ˆ [ ]
j j j
j s u s u s u
r i x −x i + y −y i + z −z i (1.26).
Tenendo conto delle equazioni (1.23)-(1.25), la (1.22) può essere approssimata come
ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ[ ] ˆ[ ] ˆ[ ] j j j s u s u s u j j u u u u j j j x x i y y i z z i i x y z c t r i r i r i ρ =ρ − − ⋅ ∆ − − ⋅ ∆ − − ⋅ ∆ + ⋅ ∆ (1.27),
nella quale ˆ [ ]ρj i è stato definito come
(
) (
2) (
2)
2ˆ ˆ
ˆj[ ]i xsj x iˆu[ ] ysj y iˆu[ ] zsj z iˆu[ ] c t iu[ ] r iˆj[ ] c t iu[ ]
ρ − + − + − + ⋅ = + ⋅ ;
riordinando quindi la (1.27) ponendo a sinistra le quantità note ed a destra le incognite del problema, otteniamo
ˆ [ ] ˆ [ ] ˆ [ ] ˆ [ ] ˆ[ ] ˆ[ ] ˆ[ ] j j j s u s u s u j j u u u u j j j x x i y y i z z i i x y z c t r i r i r i ρ −ρ = − ⋅ ∆ + − ⋅ ∆ + − ⋅ ∆ − ⋅ ∆ (1.28).
Per alleggerire la notazione, semplifichiamo l’espressione precedente introducendo la variabili
ˆ [ ] [ ] ˆ [ ] ˆ [ ] [ ] ˆ [ ] ˆ [ ] [ ] ˆ [ ] j j j j j j s u x j s u y j s u z j x x i i r i y y i i r i z z i i r i α α α − − − ,
in virtù delle quali la (1.28) diventa ˆ [ ] [ ] [ ] [ ] [ ] j j j j i j i j x i xu y i yu z i zu c tu ρ ρ ρ α α α ∆ − = ⋅ ∆ + ⋅ ∆ + ⋅ ∆ − ⋅ ∆ .
A questo punto abbiamo le quattro incognite ∆ , xu ∆ , yu ∆ , zu ∆ , che possono essere tu ottenute facendo ricorso alle misure degli pseudorange relativi ai quattro satelliti, ovvero risolvendo il sistema di equazioni lineari
1 1 1 2 2 2 3 3 3 4 4 4 1 2 3 4 [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] x u y u z u u x u y u z u u x u y u z u u x u y u z u u i i x i y i z c t i i x i y i z c t i i x i y i z c t i i x i y i z c t ρ α α α ρ α α α ρ α α α ρ α α α ∆ = ⋅ ∆ + ⋅ ∆ + ⋅ ∆ − ⋅ ∆ ⎧ ⎪∆ = ⋅ ∆ + ⋅ ∆ + ⋅ ∆ − ⋅ ∆ ⎪ ⎨∆ = ⋅ ∆ + ⋅ ∆ + ⋅ ∆ − ⋅ ∆ ⎪ ⎪∆ = ⋅ ∆ + ⋅ ∆ + ⋅ ∆ − ⋅ ∆ ⎩ (1.29).
Sfruttando la notazione di tipo matriciale, definiamo
[ ]
[ ]
1 1 1 2 1 2 3 3 3 4 4 4 1 2 3 4 [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] , , [ ] [ ] [ ] [ ] [ ] [ ] [ ] [ ] x y z u x y z u u x y z u x y z i i i c x i i i i c y i i A i x z i i i i c t i i i i c α α α ρ α α α ρ ρ ρ α α α ρ α α α − ⎡ ⎤ ∆ ∆ ⎡ ⎤ ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢∆ ⎥ − ∆ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ∆ = =⎢ ⎥ ∆ = ⎢ ⎥ ⎢∆ ⎥ ⎢ − ⎥ ∆ ⎢ ⎥ ⎢∆ ⎥ ⎢ ⎥ ∆ ⎢ ⎥ − ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ ⎣ ⎦ (1.30),con cui il sistema (1.29) può essere riscritto come [ ]i A i[ ] x
ρ
∆ = ⋅ ∆ (1.31),
che prevede una soluzione del tipo
1
[ ] [ ]
x A i − ρ i
∆ = ⋅ ∆ (1.32).
In realtà, andando a sostituire dei dati reali all’interno della matrice [ ]A i definita in (1.30), si nota che la quarta colonna presenta dei valori molto maggiori rispetto a quelli delle altre tre colonne; questa situazione non è molto consigliabile nel
momento in cui si ha a che fare con dei calcolatori a precisione finita, in quanto potrebbe comportare dei problemi a livello di instabilità numerica; è pertanto opportuno ridefinire [ ]A i e ∆x come
[ ]
1 1 1 2 1 2 3 3 3 4 4 4 [ ] [ ] [ ] 1 [ ] [ ] [ ] 1 , [ ] [ ] [ ] 1 [ ] [ ] [ ] 1 x y z u x y z u u x y z u x y z i i i x i i i y A i x z i i i c t i i i α α α α α α α α α α α α ⎡ ⎤ ⎡ ∆ ⎤ ⎢ ⎥ ⎢ ⎥ ∆ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ ∆ = ⎢ ∆ ⎥ ⎢ ⎥ ⎢ ⎥ − ⋅ ∆ ⎢ ⎥ ⎢⎣ ⎥⎦ ⎣ ⎦ (1.33),con cui valgono ancora le relazioni (1.31) e (1.32).
A questo punto è possibile aggiornare la soluzione approssimata al passo ( 1)i+ − esimo, in virtù delle relazioni
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
ˆ 1 ˆ ˆ 1 ˆ ˆ 1 ˆ ˆ 1 ˆ u u u u u u u u u u u u x i x i x y i y i y z i z i z t i t i t + = + ∆ + = + ∆ + = + ∆ + = + ∆ ,nelle quali è possibile notare l’analogia tra gli elementi del vettore ∆x ed il termine
( )
( )
1 1 i i f f x f x − − − ′della (1.21), che rappresenta la soluzione del generico caso monodimensionale15. È possibile allora calcolare l’errore εi come
2 2 2 2
i xu yu zu tu
ε = ∆ + ∆ + ∆ + ∆ ,
che permette di arrestare l’algoritmo iterativo nel momento in cui εi scende al di sotto di una soglia arbitrariamente piccola16.
Il procedimento sopra descritto ha senso se i satelliti a disposizione sono quattro. Nel momento in cui, però, si rende disponibile un numero superiore di satelliti, sono due le strade percorribili: una prima soluzione consiste nello sceglierne i quattro la cui disposizione offre le condizioni migliori per il calcolo della posizione, mentre la seconda mira a sfruttare le informazioni provenienti da tutti i satelliti.
15 Si presti attenzione al fatto che il quarto elemento di ∆x non è
u
t
∆ , bensì − ⋅ ∆c tu
16 Per ottenere un’approssimazione sufficientemente buona, una soglia dell’ordine di 10−5 si rivela
Le librerie per il calcolo della posizione utilizzate per questa tesi usano il secondo metodo, evitando di effettuare una selezione tra i satelliti, con tecniche del tipo Diluition Of Precision (DOP)17.
La soluzione può essere ottenuta mediante un procedimento molto simile a quello visto finora, che si basa sull’approssimazione ai minimi quadrati.
Il sistema GPS è formato da tre segmenti:
a) Space Segment (SS)
b) Operational Control Segment (OCS) c) User Segment (US)
1.3.1. Lo Space Segment (SS)
Lo SS è costituito da una costellazione di 24 satelliti operativi, cui si affiancano 4 satelliti previsti per eventuali sostituzioni.
I satelliti sono disposti, a gruppi di 4 o 5, su sei orbite centrate attorno alla Terra, con una disposizione tale da garantire i minimi effetti negativi in caso di mancato funzionamento di uno di questi.
Le orbite, di tipo ellittico, sono equispaziate tra loro di 60° e presentano un angolo di inclinazione di 55° rispetto all’equatore ed un raggio approssimativo di 26,560 km (Fig. 1.14).
Come si evince dal raggio orbitale, i satelliti non sono di tipo geostazionario, ma hanno un tempo di rivoluzione attorno alla Terra pari alla metà del giorno siderale, equivalente a circa 11 ore e 58 minuti, con una velocità di 3874 m/sec ed un peso a terra di 2032.13 kg ed in orbita di circa 1075.03 kg 18.
Fig. 1. 14 – Costellazione delle orbite dei satelliti GPS
Riguardo alla posizione dei satelliti rispetto ad un dato punto sulla superficie terrestre, bisogna anche mettere in conto la rotazione della Terra stessa. Approssimando a 12 ore il tempo di rivoluzione del satellite, considerate le 24 ore di rotazione della Terra, possiamo allora dire che questo si troverà sulla verticale dello stesso punto della superficie dopo 24 ore, cioè dopo due giri di rivoluzione completi. La Fig. 1.15 mostra le 24 ore che occorrono ad un generico satellite per ritrovarsi nel punto di partenza. Lo space segment, istante per istante, deve essere organizzato in modo tale da assicurare la visione di almeno 4 satelliti da ogni punto del Globo; per sicurezza, da specifica di sistema, da ogni posizione a terra, purché libera da ostacoli, si vedono costantemente da 5 a 8 satelliti.
0° 0° 180° 120° 60° -60° -120° -180° -90° 90° -60° 60° 30° -30° -150° -90° -30° 30° 90° 150° Longitudine La ti tu d in e 0h 3h 6h 9h 12h 15h 18h 21h 24h
Fig. 1. 15 – Traiettoria seguita da un generico satellite in circa 24 ore
Nel corso degli anni, come anticipato nel Par. 1.1, abbiamo assistito ad una evoluzione dei satelliti, a partire dal Block I fino ad arrivare ai più moderni Block IIR
(Fig. 1.16) 19.
Fig. 1. 16 – Satellite BLK IIR ([8])
Componenti fondamentali di ciascun satellite sono i quattro orologi atomici a bordo, due al Cesio e due al Rubidio, che garantiscono un errore inferiore al secondo per un periodo che va da 30,000 ad un milione di anni e che servono per la
generazione dei segnali in trasmissione; tali orologi, infatti, danno luogo ad un oscillatore con una frequenza base di 10.23 MHz, da cui è possibile ricavare tutte le frequenze in gioco: oltre ai generatori di codice, a 10.23 Mbit/sec e 1.023 Mbit/sec, è possibile ottenere il clock a 50 Hz, dividendo l’oscillatore di riferimento per 204,600, e le frequenze portanti L1 e L2, moltiplicando rispettivamente per 154 e 120 (per chiarimenti vedi Fig. 1.6).
L’angolo di apertura dei trasmettitori satellitari è rispettivamente di 21°18" per il segnale L1 e di 23°24" per il segnale L2, ampiamente sufficiente per la copertura della superficie terrestre, come si evince dalla Fig. 1.17.
Raggio medio terrestre 6368 km Satellite Terra Distanza maggiore 25785 km Distanza minore 20192 km ß = 13°52" ß
Fig. 1. 17 – Orbita satellitare circolare
Considerando il raggio orbitale pari a 26,560 km ed il raggio medio terrestre pari a 6,368 km, applicando il teorema di Pitagora al triangolo formato dal raggio terrestre e dalle distanze calcolate tra il satellite e i punti a distanza minima e massima in cui esso è visibile, si ottiene un angolo massimo di apertura pari a 13°52". Una ulteriore conseguenza della situazione riportata in Fig. 1.18 è la necessità di sagomare il diagramma di irradiazione in modo tale da rendere più uniforme possibile la potenza ricevuta sui vari punti della superficie terrestre. Infatti la distanza minima e la distanza massima riportate in Fig. 1.17 corrispondono
rispettivamente ad un tempo di transito di 67 ms e 86 ms, ottenute attribuendo all’onda elettromagnetica la velocità della luce c = 3x108 m/s; questo vuol dire che il
massimo ritardo di tempo tra due diversi segnali, nello stesso punto della Terra, è di 19 ms. Se la potenza trasmessa fosse uniforme su tutto l’angolo di apertura, non lo sarebbe la potenza ricevuta sui vari punti della superficie a causa della diversa distanza. Per rendere il più indipendente possibile la potenza ricevuta dal punto di ricezione, il diagramma di radiazione dei trasmettitori presenta un profilo sagomato opportunamente sull’angolo di apertura; tale distribuzione deve tenere conto anche del non uniforme guadagno di antenna del ricevitore di terra rispetto all’angolo di elevazione.
Tipicamente, in accordo con le specifiche di sistema, la potenza in trasmissione è pari ad almeno 13.4 dBW, con un guadagno di antenna di circa 13.4 dBi, che assicurano un livello minimo di –160 dBW in ingresso al ricevitore di uso
civile (considerando inoltre le perdite dovute alla propagazione in spazio libero ed al disadattamento di polarizzazione). ß = 13°52" SL1 SL1 SL2 21°18" 23°24"
1.3.2. L’OPERATIONAL CONTROL SEGMENT (OCS)
L’OCS ha il compito di controllare e monitorare l’intero sistema GPS.
L’intera sezione è composta da una stazione di comando, la MCS (Master Control Station), situata nella Falcon Air Force Base in Colorado, da cinque stazioni di monitoraggio MS (Monitor Station) e da tre stazioni trasmittenti GA (Ground Antenna), controllate dall’organo statunitense DSCS (Defense Satellite Communications System). Le stazioni MSC e GA sono situate attorno al Globo nelle vicinanze dell’equatore. La stazione di comando è responsabile del lavoro svolto da tutto il control segment; essa elabora le informazioni pervenute da tutti i satelliti attraverso le 5 stazioni di monitoraggio, mette a punto tutte le correzioni necessarie per ogni satellite e comanda la trasmissione delle stesse attraverso le 3 stazioni di controllo.
Tra le operazioni svolte dal Control Segment, le più importanti sono quelle di monitoraggio dello stato dei satelliti, monitoraggio degli orologi di bordo dei satelliti, del calcolo dei fattori orbitali e della trasmissione delle correzioni di tali parametri, ottenute avvalendosi di strumenti di misurazione e di calcolo notevolmente potenti e accurati.
1.3.3. LO USER SEGMENT (US)
Lo US è rappresentato da tutti gli utenti civili e militari del sistema GPS e in questa trattazione ci occuperemo soltanto della prima categoria di ricevitori.
In un ricevitore il segnale è ricevuto dall’antenna e subito dopo viene fatta la conversione digitale in banda base del segnale ricevuto; a questo punto, sulla base dell’algoritmo di predizione dei satelliti in visibilità, vengono generati a livello locale i codici PRN associati a ciascun satellite ricevuto.
Effettuando una misura della correlazione tra il segnale complessivo ed il codice locale, il ricevitore è in grado di separare i vari canali, corrispondenti ai diversi satelliti, dando luogo ad una prima fase di acquisizione rozza, cui seguirà una fase di tracking del segnale.
Una volta che il ricevitore si è sincronizzato con i dati di ciascun satellite, scatta la fase di Navigazione, nella quale vengono immagazzinati tutti i dati necessari alla fase di Positioning, che, dialogando con la Man-Machine Interface (MMI), fornisce una stima della posizione dell’utente sulla superficie terrestre.
La Fig. 1.19 mostra uno schema generale della struttura del sistema GPS, visto nei suoi principali segmenti.
Fig. 1. 19 – Organizzazione del sistema GPS nei tre segmenti
Il segnale trasmesso da ciascun satellite GPS contiene tutte le informazioni necessarie per la stima della posizione da parte di un utente situato sulla superficie terrestre.
In questo paragrafo vengono illustrate le principali caratteristiche del formato di tale segnale e come già anticipato nel Par. 1.2, i dati trasmessi dallo Space Segment hanno un bitrate pari a 50 bit/sec e vanno a sommarsi modulo 2 ai codice P(Y) e C/A, i cui chip/rate sono rispettivamente di 10.23 Mchip/sec e 1.023
Nel caso del segnale SPS, all’interno di un solo bit di dato, di lunghezza 1
20 msec 50 bit/sec= , si ripetono 20 codici C/A, di durata pari a
1023
1 msec 1023 Mchip/sec = .
La gerarchia del segnale GPS (Fig. 1.20) prevede 25 frame, che si compongono ciascuno di 5 subframe; ciascun subframe è formato a sua volta da 10 word, di lunghezza pari a 30 bit, che corrispondono ad una durata di 0.6 sec. Occorrono pertanto 6 sec per la trasmissione di un subframe e 30 sec per la trasmissione di un frame, mentre la durata complessiva del messaggio GPS è pari a 12.5 minuti. 1 2 3 4 5 6 7 8 9 10 11 121314 151617181920 2122 23 24 25 Messaggio di navigazione 25 frames 37500 bits 12,5 minuti 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9101 2 3 4 5 6 7 8 9101 2 3 4 5 6 7 8 9101 2 3 4 5 6 7 8 9 10 Frame 5 sub-frames 1500 bits 30 secondi 1 2 3 4 5 6 7 8 9 10 Sub-frame 300 bits 6 secondi
Sub-frame 1 Sub-frame 2 Sub-frame 3 Sub-frame 4 Sub-frame 5
Ephemeris
Dati
Ephemeris Almanac
8 Bits 16 Bits 6 Bits
Preambolo Riservato Parità (TLM) Telemetry word 30 bits 0,6 secondi Clock, Stime Correzioni
17 Bits 3 Bits 8 Bits
(TOW)
Time Of Week ID Parità (HOW) Handower word 30 bits 0,6 secondi 2 Bits Flags Numero di parola Almanac Altri dati
Ciascuna word è composta dai primi 24 bit, contenenti l’informazione vera e propria, mentre i restanti 6 bit sono utilizzati per il controllo della parità secondo un algoritmo piuttosto complesso.
Ogni subframe, formato da 10 word, inizia sempre, con due word ben definite, la TeLeMetry word (TLM) e la Hand-Over Word (HOW).
TLM contiene un preambolo di 8 bits usato per il sincronismo, seguito da 16
bits riservati a particolari usi autorizzati e da 6 bits di parità. Gli 8 bits di preambolo sono 10001011 e permettono al ricevitore GPS di rilevare l’inizio del sub-frame.
HOW contiene come primo campo il contatore TOW dato da 17 bits che
rappresenta il tempo della settimana in unità di 6 secondi; questo viene, infatti, incrementato ogni 6 secondi, la lunghezza di un sub-frame, e viene azzerato ogni settimana. Il range del contatore TOW risulta quindi essere 0 – 100799. Per il sistema GPS ci si riferisce all’UTC (Universal Time Coordinated); il riferimento zero del tempo UTC per il sistema GPS è stato deciso alle ore 00:00:00 del 6 gennaio 198020. Il bit 18 è un bit di “allerta” (il cosiddetto “Alert” Flag), che, se settato ad 1, avverte gli utenti civili che i dati che seguono possono non essere significativi, mentre il bit 19 è destinato alla segnalazione della configurazione Anti-Spoofing (AS): se è pari ad 1, la configurazione AS è attiva. Il campo ID indica, attraverso i bits
n° 20, 21 e 22 di HOW, in numero di sub-frame che sta per essere trasmesso, mentre gli ultimi 8 bits di HOW servono ancora per la parità.
Ogni frame è organizzato in 5 sub-frames; ogni sub-frame contiene la decodifica dei dati che hanno diverso significato a seconda del sub-frame considerato, come spiegato di seguito.
Sub-frame 1. Nel primo sub-frame sono contenute diverse informazioni. Da
qui vengono ottenuti i dati riguardo l’istante di trasmissione e i diversi parametri correttivi per far fronte alla deriva degli orologi di bordo. Attraverso questo sub-frame viene anche informato il ricevitore circa la qualità della trasmissione in termini
20 Mentre il tempo GPS è basato su una scala continua, dal momento che si riazzera ogni settimana allo
scoccare della mezzanotte tra Sabato e Domenica, il tempo UTC, nominalmente riferito al meridiano di Greenwich e mantenuto dallo U. S. Naval Observatory (USNO), viene corretto periodicamente con un numero intero di secondi.
di affidabilità e vengono, inoltre, trasmesse a terra due diverse stime: una riguarda l’accuratezza con la quale è possibile calcolare la posizione dell’utente, l’altra è la stima del ritardo differenziale con il quale, il ricevitore, tiene conto del ritardo di gruppo.
Un altro parametro trasmesso con il primo sub-frame è l’IODC (Issue Of Data Clock); questo indica il numero dei parametri correttivi trasmessi riguardo al tempo e quindi serve al ricevitore per rilevare subito una qualche variazione rispetto alle trasmissioni precedenti.
Tale sub-frame contiene anche il numero della settimana con il range 0 - 1023 (10 bits), azzerato ogni 1024 settimane. Il sub-frame 1 ha lo stesso formato per tutte le 25 pagine del messaggio di navigazione.
Sub-frames 2 e 3. Nel secondo e terzo sub-frame sono contenuti i dati
dell’ephemeris cioè tutte le informazioni più accurate circa l’orbita del satellite trasmittente. Equivalentemente all’IODC del sub-frames 1, nei sub-frames 2 e 3 è contenuto l’IODE (Issue Of Data Ephemeris); questo rappresenta il numero dei parametri correttivi trasmessi riguardo alla posizione dei satelliti e indica al ricevitore una qualche variazione rispetto alle trasmissioni precedenti. Anche tali sub-frames hanno lo stesso formato per le 25 pagine del messaggio di navigazione. Affinché i dati di navigazione da inviare al Positioning siano consistenti, tale valore deve essere coerente con lo IODC: in particolare, se IODE è pari a IODC mod 256, i dati del clock e delle effemeridi sono significativi, altrimenti occorre attendere una ulteriore trama.
Sub-frame 4. Il sub-frame 4 contiene le parole da 3 a 10 in formati diversi a
seconda di quale pagina consideriamo all’interno dell’intero messaggio di navigazione. In particolare abbiamo 6 diversi formati come spiegato di seguito:
1) Nelle pagine 2, 3, 4, 5, 7, 8, 9 e 10 è contenuto il campo almanac relativo ai satelliti da 25 a 32. Nel caso del GPS, avente 24 satelliti operativi e 28 in totale, è ovvio che tale formato è già predisposto per una eventuale espansione del sistema. Il sub-frames 4 di tali pagine può essere utilizzato anche per altri scopi, riconosciuti dal ricevitore attraverso il numero ID identificativo del satellite. 2) Nel frame 17 sono contenuti speciali messaggi.
3) Nel frame 18 sono contenuti il tempo UTC e alcuni parametri di correzione per il ritardo ionosferico.
4) Nel frame 25 sono contenuti AS flag per 32 satelliti e i parametri che indicano lo stato di funzionamento dei satelliti dal 25 al 32.
5) Nei frames 1, 6, 11, 12, 16, 19, 20, 21, 22, 23 e 24, il sub-frame 4 è riservato a particolari trasmissioni autorizzate.
6) Nei frames 14 e 15, il sub-frame 4 è riservato al sistema.
7) Nel frames 13 nel sub-frame 4 abbiamo Navigation Message Correction Table (NMCT).
Sub-frame 5. Il sub-frame 5, come il 4 sopra descritto, presenta formati
diversi a seconda di quale pagine consideriamo; in questo caso abbiamo solo 2 formati:
1) Nei frames da 1 a 24 è contenuto il campo almanac relativo ai satelliti operativi da 1 a 24.
2) Nel frame 25 sono contenuti i parametri che indicano lo stato di funzionamento dei satelliti operativi dall’1 al 24. Sono inoltre riportati i riferimenti di tempo per il campo almanac e per il campo TOW.
Come illustrato nel Par. 1.2, un utente GPS ha bisogno di conoscere la posizione dei satelliti di cui sta decodificando i dati: per fare questo, necessita almeno dei parametri di correzione del clock e delle effemeridi21. Nel caso più “fortunato”, intercorrono 18 secondi tra la fine della fase di sincronizzazione di trama e l’inizio della fase di Positioning; nella pratica, supponendo il caso peggiore in cui il ricevitore si sia sincronizzato sul subframe 4, si attendono 30 secondi, in modo tale da avere la certezza di aver ottenuto tutti i dati necessari e considerare il canale pronto per la fase di Positioning22.
21 Per una stima accurata occorrono anche i parametri per le correzioni atmosferiche e per il passaggio
GPS-UTC, che però hanno un intervallo di validità di diverse settimane; supponendo di utilizzare un ricevitore software, questo dispone tipicamente di una memoria non volatile, in cui vengono memorizzati tali parametri e da cui si può attingere per la fase di Positioning
Appena ottenute le informazioni da un satellite, il ricevitore si sincronizza sul messaggio di navigazione di un altro satellite e così via, per tutti i satelliti dai quali, in quel momento, è possibile ricevere.
L’intero messaggio di navigazione viene trasmesso da ogni satellite ciclicamente nel tempo. Al termine di una settimana in riferimento al tempo UTC, quando cioè il campo TOW passa da 100799 a 0, il messaggio di navigazione viene interrotto, in qualunque punto si trovi, per essere ritrasmesso dall’inizio, dal primo sub-frame del primo frame.
Per una trattazione più dettagliata si faccia riferimento a [9].
Come avevamo accennato nel Par 1.2.2 ci sono ci sono delle sorgenti di errore che, con i rispettivi disturbi, vanno ad influenzare negativamente il calcolo della posizione; un elenco e i loro valori tipici sono riportati in Tab. 1.5. I più importanti disturbi sono rappresentati dalla deriva del clock del satellite rispetto a quello del sistema e dai ritardi introdotti da ionosfera e troposfera. A questo proposito esistono dei modelli che consentono di stimare l’errore aggiuntivo, però, poiché soprattutto nel caso del ritardo atmosferico, questo dipende dalla posizione, che è proprio ciò che cerchiamo, si rende necessario l’impiego di un algoritmo iterativo che si arresta nel momento in cui la differenza tra la soluzione ottenuta al passo attuale e quella al passo precedente è inferiore ad una soglia prefissata ε. Infatti dal punto di vista operativo, il calcolo iterativo non può protrarsi fino ad un errore arbitrariamente piccolo perché, l’errore è limitato inferiormente da diverse quantità aleatorie delle quali conosciamo solo la natura e poche altre caratteristiche.
Prima di andare ad analizzare queste sorgenti di errore vediamo come si combinano nell’espressione dello pseudorange prendendo l’espressione 1.15 e riscrivendola in questo modo
_ _
i r c ti u c ts i c tatm i SAi Ei MPi i
ρ = + ⋅ + ⋅ + ⋅ ∆ + + + + (1.34) µ
dove il pedice i indica l’iesimo satellite e ∆tatm = ∆ttropo+ ∆tiono
( )
f .Tab. 1. 5 – Fonti di errore misurate con un tipico ricevitore SPS ([7])
Sorgente di errore
Range tipico dell’ampiezza dell’errore (in metri)
Selective Availability* (SA) 24.0 Ionosfera ** ( ( )) iono t f ∆ 7.0 Troposfera *** ( ) tropo t ∆ 0.7
Clock del satellite ( )ts 3.6
Effemeridi ( )E 3.6
Rumore del ricevitore ( )µ 1.5
Errore di multipathv (MP) 2.5
* disturbo rimosso nel maggio 2000
** dopo l’applicazione del modello ionosferico
*** dopo l’applicazione del modello troposferico
Le diverse sorgenti di errore perturbano le equazioni del sistema 1.18, per cui deve essere modificata la forma matriciale ∆ =x A i[ ]−1⋅ ∆ρ[ ]i e il sistema con cui abbiamo a che fare nella realtà è :
1 1
[ ] [ ] [ ]
x A i − ρ i A i − N
∆ = ⋅ ∆ + ⋅ ∆ (1.35)
La nuova matrice N∆ tiene conto di tutte le sorgenti di errore sopra elencate ed è composta quindi da coefficienti aleatori. L’effetto negativo di N∆ sul calcolo della posizione non può essere attenuato attraverso l’iterazione; attraverso questa otterremo solo una stima della posizione dell’utente, con un errore rispetto alla posizione reale la cui entità non è più controllabile dal ricevitore. L’errore che inevitabilmente rimane al termine del calcolo iterativo è un processo aleatorio non bianco la cui modellizzazione non è affatto semplice.
![Fig. 1. 1 – Satellite BLK IIA ([2])](https://thumb-eu.123doks.com/thumbv2/123dokorg/5695109.72963/4.892.107.731.260.692/fig-satellite-blk-iia.webp)