3 Progettazione hardware del dispositivo
3.1 Specifiche del progetto
In base alle caratteristiche di una rete domotica orientata in particolare alle esigenze delle persone disabili e anziane, indicate nel primo capitolo e ai criteri di progetto esposti, possiamo definire in maniera precisa le caratteristiche del nostro gateway.
Il dispositivo si presenterà come una scatola di piccole dimensioni totalmente senza fili. Sarà in grado di comunicare via radio con l’interfaccia utente e di comandare tramite raggi infrarossi tutti i dispositivi dotati di ricevitore IR. Per facilitarne al massimo l’inserimento e liberare l’utente da ogni vincolo, il dispositivo sarà dotato di alimentazione propria. In questo modo l’acquirente può porre l’oggetto nel punto che più gradisce senza il vincolo della presa elettrica.
Non è previsto l’utilizzo di un display in quanto l’utente non interagisce direttamente con il gateway, ma sull’interfaccia utente. Per dare un feedback visivo che il dispositivo funziona correttamente, verrà posto un LED di colore verde che si accenderà quando c’è interazione tra UI e gateway.
3.2 Descrizione a blocchi del sistema e scelta dei componenti
Dopo aver elencato le specifiche del sistema, andiamo a vedere uno schema a blocchi che illustra le parti principali del sistema.
Figura 3.1: Schema a blocchi della parte hardware del progetto
Come si può vedere dallo schema, il dispositivo sarà formato da quattro blocchi principali: il blocco microcontrollore che sarà il cuore del progetto, il blocco di rice/trasmissione radio in grado di scambiare informazioni con l’interfaccia utente, il blocco di invio raggi IR per comandare i dispositivi indirizzabili e infine il blocco di alimentazione.
Vediamo più in dettaglio quali sono le caratteristiche dei vari blocchi e su quali dispositivi sono cadute le scelte hardware.
3.3 Blocco del microcontrollore
Il microcontrollore è il vero e proprio cuore del sistema: su di esso grava la maggior parte del lavoro. Per questo è molto importante sia la scelta di un dispositivo adeguato, sia la corretta programmazione in modo da fargli svolgere correttamente tutte le funzioni.
Vediamo in dettaglio quali sono i principali compiti del nostro microcontrollore:
•
Colloquio con il blocco di rice/trasmissione: il microcontrollore deve essere in gradodi inviare e ricevere dati tramite la porta seriale, in modo asincrono. In questo modo è possibile “parlare” con il blocco di rice/trasmissione per ricevere i comandi da far attuare al blocco di invio raggi IR e trasmettere all’interfaccia utente il risultato dell’operazione.
•
Interpretazione del comando ricevuto: in base all’informazione arrivata via seriale, ilmicrocontrollore deve interpretare il messaggio per vedere se si tratta di un comando verso un dispositivo o dell’inserimento in memoria di un nuovo dispositivo presente nella stanza. In caso si tratti di un comando viene scelto, in base al dato arrivato, l’oggetto da indirizzare e di conseguenza vengono impostati il codice e la codifica del comando corretti. Questa è la parte cruciale di tutto il progetto in quanto l’enorme vastità di codici IR esistenti rende problematica sia la scelta del giusto codice sia l’invio corretto.
•
Gestione del blocco invio raggi IR. Il microcontrollore trasmette il comando dainviare al dispositivo, su un piedino al quale è collegato il circuito che provvede alla conversione tensione-impulsi IR.
•
Controllo dello stato delle batterie: tramite l’ADC presente all’interno delmicrocontrollore, è possibile controllare lo stato di carica delle batterie in modo da poter indicare all’utente quando effettuare la sostituzione o la ricarica.
In base alle caratteristiche sopra elencate, i principali requisiti che ci hanno indirizzato verso la scelta di un particolare microcontrollore sono stati: presenza di una porta USART, quantità di memoria sia flash che EEPROM, possibilità di essere avviato tramite bootloader, presenza di contatori hardware integrati e infine consumo e costo contenuti. La scelta finale è caduta sul microcontrollore Atmel ATMega32. La Atmel è una industria leader nel design e costruzione di semiconduttori e in particolare di microcontrollori, memorie non volatili, circuiti logici e sensori a radio frequenza. L’ ATMega32, come tutti gli altri processori della serie ATMega, è un microcontrollore a 8 bit con architettura RISC ed è dotato di numerose strutture I/O in modo da limitare l’uso di componenti esterni.
Clock interno, timer, USART, SPI, modulazione PWM, ADC e comparatori analogici sono solo alcuni dei circuiti presenti all’interno del microcontrollore. In particolare l’ATMega32 è dotato di 32 kByte di memoria flash autoprogrammabile, 1 kByte di memoria EEPROM, tre timer interni e una porta USART1. Come clock di sistema abbiamo utilizzato un cristallo con oscillazioni a 8 MHz ottenendo un buon compromesso tra stabilità e risoluzione per i le temporizzazioni richieste (vedi il capitolo dedicato alla parte software).
3.4 Blocco di invio raggi infrarossi
Una volta ricevuto un messaggio di comando, il microcontrollore genera il codice relativo e lo rende disponibile sul piedino PD7. Il circuito di invio raggi IR si occupa di convertire questo segnale elettrico in ottico operante nella banda infrarossa.
Come previsto dalla nostra architettura, il gateway verrà posto all’interno di una stanza e dovrà essere capace di comandare i dispositivi presenti. Per far questo, il circuito di emissione raggi IR deve essere abbastanza potente in modo da poter coprire l’intera area della stanza. Per far ottenere al dispositivo una migliore visibilità e facilitarne l’inserimento nell’ambiente, abbiamo pensato di porre quattro LED irradianti, uno per ogni asse. In questo modo possiamo pensare di indirizzare il maggior numero di oggetti possibili anche in presenza di ostacoli (tavoli, armadi, sedie, ecc…).
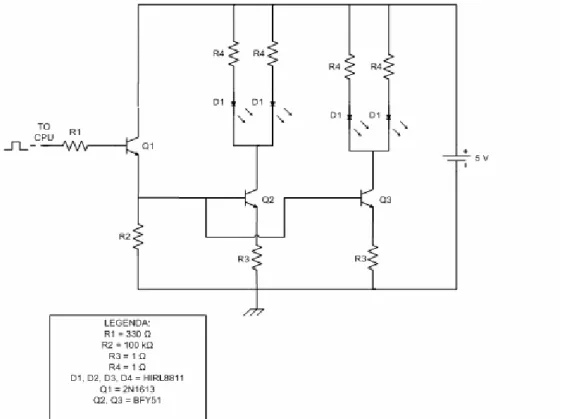
Per non caricare troppo la porta del microcontrollore, abbiamo pensato ad una struttura che a 3 transistor bipolari BJT.
Figura 3.2: Circuito di emissione raggi IR
Il Q1 (modello 2N1613) è un transistor di media potenza che è stato scelto per dare una adeguata corrente di base a Q2 e Q3 senza sovraccaricare il microcontrollore. Dai data sheet rilasciati dalla Atmel notiamo infatti che la corrente massima di uscita per i pin delle porte è di 40 mA. Utilizzando Q1 riusciamo a fornire 40 mA di corrente di base sia a Q2 che a Q3, prelevando dal microcontrollore meno di 10 mA. I transistor Q2 e Q3 sono dei BFY51, amplificatori a media potenza scelti perché supportano una elevata corrente di collettore di picco (1,5 A) e hanno dei tempi di commutazione molto rapidi (dell’ordine dei 100 ns e quindi 10 volte più basso della frequenza della portante del segnale da generare). Con i valori indicati nello schema, si arriva ad erogare una corrente di 160 mA per LED. Come possiamo notare è un valore piuttosto elevato di corrente che però è tollerata dai LED in quanto viene erogata a impulsi e per un breve periodo.
3.5 Blocco radio
Il blocco radio di occupa di mettere in comunicazione il gateway con l’interfaccia utente. Durante il progetto, si è presentato il problema di scegliere uno dei molti protocolli esistenti. Diamo un rapido sguardo ai principali e scegliamo quello che ci sembra più opportuno.
3.5.1 Wi-Fi
Il sistema Wi-Fi (Wireless Fidelity ) si basa sul protocollo di trasmissione IEEE 802.11b ed è stato progettato principalmente per la trasmissione dati ad alta velocità su banda larga. La temporizzazione di accesso al canale è la CSMA/CA (Carrier Sense Multiple Access /
Collision Avoidance). In questo protocollo quando un nodo riceve un pacchetto che deve
essere trasmesso, prima ascolta la portante per sentire se qualcun altro sta trasmettendo. Se la portante è libera allora trasmette il pacchetto, altrimenti aspetta un tempo casuale chiamato “backoff factor” e poi trasmette il pacchetto. Con questo metodo si ha una grande probabilità che il canale sia libero in quanto il tempo di attesa è completamente casuale. La trasmissione dei dati avviene attraverso le tecniche di spread spectrum signals che occupano una maggior banda di trasmissione distribuendo il segnale attraverso l'intero spettro di frequenze ma consentono una miglior ricezione dei segnali deboli, garantiscono l'integrità del segnale e una maggior sicurezza. In particolare il Wi-Fi si avvale di due tecniche: FHSS e DSSS. Nella Frequency Hope Spread Spectrum il segnale ad una data frequenza viene fatto "saltare" da una canale all'altro. Il vantaggio di tale sistema, quando il rapporto fra la larghezza di banda originale del segnale e la larghezza di banda del segnale di diffusione è molto grande, è di offrire una grande immunità all' interferenza. La tecnologia consente a più utenti di condividere lo stesso insieme di frequenze cambiando automaticamente la frequenza di trasmissione fino a 1600 volte al secondo, al fine di una maggiore stabilità di connessione e di una riduzione delle interferenze tra canali di trasmissione. Il sistema FHSS risulta molto sicuro contro interferenza e l'intercettazione in quanto risulta statisticamente impossibile capire la sequenza con cui avvengono i salti di
frequenza. L'interfaccia DSSS utilizza un sistema con dispersione in banda base utilizzando un codice di dispersione. In tale codice ogni bit trasmesso viene disperso su una sequenza a 11 bit.
In una rete Wi-Fi troviamo due tipi di dispositivi: Access Point e Wireless Terminal. Gli
AP sono dispositivi che collegano la rete wireless con quella cablata. Possono essere
implementati sia in hardware che in software, appoggiandosi per esempio ad un PC dotato sia dell’interfaccia wireless sia di una scheda ethernet. In genere sono dotati di antenne omidirezionali o direzionali, in modo da aumentarne la portata. I WT sono dei dispostivi che usufruiscono dei servizi di rete senza essere direttamente collegati alla LAN. Essi possono essere qualsiasi tipo di dispositivo (desktop, palmare, portatile, ecc.) provvisto di una scheda Wi-Fi.
Una rete Wi-Fi può essere formata solo da WT (in questo caso non si ha collegamento con la rete fissa) oppure da più WT connessi con uno o più AP. In questo modo i WT comunicano tra loro e utilizzano l’AP per collegarsi con la rete cablata.
3.5.2 Zigbee
Lo standard Zigbee è stato studiato dalla Zigbee Alliance per definire uno standard sicuro, a basso costo, senza fili e a basso consumo energetico. E’ quindi indicato per applicazioni in cui lo scambio dati tra i dispositivi non è continuo, ma avviene occasionalmente come automazioni e controlli in ambiente casalingo, periferiche PC, applicazioni mediche e anche giocattoli.
La trasmissione può avvenire su tre bande di frequenza (2.4 GHz, 902-928 MHz e 868.3 MHz) a tre differenti velocità massime (rispettivamente di 250 kbps, 40Kbps e 20 kbps). Zigbee prevede la possibilità di essere collegato a oggetti con diverse potenzialità; per questo una rete è formata da tre tipi di dispositivi: Network Coordinator (NC), Full
Function Device (FFD) e Reduced Function Device (RFD). Sia il NC che il FFD devono
conoscere tutto il protocollo e inoltre il primo deve anche amministrare la rete. Infine il RFD è il meno complesso e il meno costoso dei dispositivi analizzati. Esso consuma meno energia e richiede meno memoria in quanto non ha tutte le potenzialità del protocollo.
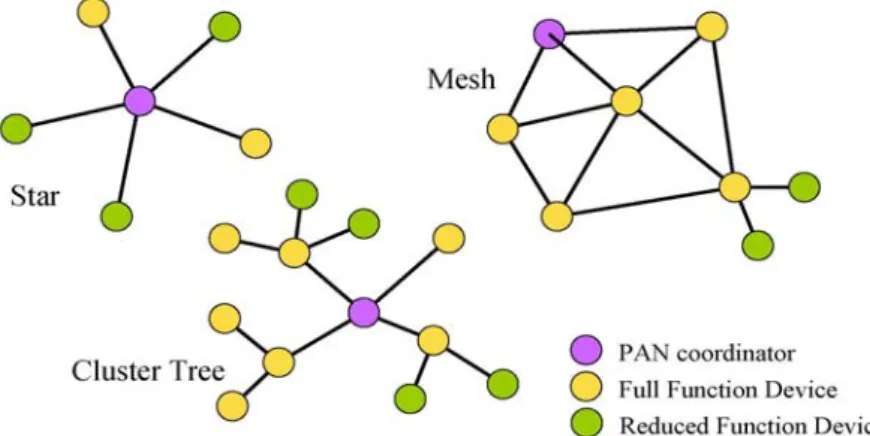
Le reti Zigbee possono essere di tre tipi: • Star
• Mesh • Cluster tree
La rete star è del classico tipo master-slave dove il master è il NC mentre gli slave possono essere sia i FFD che i RFD. Nell’architettura Mesh invece tutti i FFD comunicano tra loro, oltre a comunicare con il NC. Inoltre ciascun FFD comunica con i RFD a esso correlati. Infine la Cluster tree è un ibrido tra le due tipologie prima elencate.
Figura 3.3: rappresentazione di reti Zigbee
3.5.3 Bluetooth
La tecnologia Bluetooth è specificatamente progettata per implementare la PAN (Personal
Area Network), ovvero per realizzare la comunicazione senza fili per apparecchi di piccole
dimensioni. I dispositivi dotati di questa tecnologia comunicano tra loro creando e riconfigurando dinamicamente le reti ad hoc. La rete cambia automaticamente quando si inserisce o si elimina un dispositivo. Ciò permette ad esempio di far comunicare tra loro un desktop e un portatile semplicemente avvicinandoli tra loro.
Tutto questo è possibile grazie al "service discovery protocol" ( SDP ) che permette ad un dispositivo Bluetooth di determinare quali sono i servizi che gli altri apparecchi presenti nella rete mettono a disposizione. Ovviamente, per rendere il protocollo SDP possibile, ogni dispositivo della rete deve conoscere quali sono i servizi che esso è in grado di offrire e quali protocolli può supportare.
Tutte le apparecchiature Bluetooth predisposte in un ambiente di lavoro sono nella condizione di generare piccoli network (chiamati PICONET) senza fili costituiti da diversi tipi di apparecchi elettronici come cellulari, cuffie, proiettori, scanner, videocamere, fotocamere, elettrodomestici vari. Una piconet è costituita da due o più periferiche che condividono un canale di comunicazione, fino ad un massimo di 8 dispositivi. Uno dei dispositivi assume il ruolo di master mentre gli altri diventano automaticamente slave. La conversazione all’interno della piconet può avvenire solo tra master e slave, mai tra 2 slave. Più piconet messe assieme formano una SCATTERNET. Le comunicazioni all’esterno della piconet avvengono solo tra master mentre gli slave possono comunicare solo con i master della loro piconet. Una scatternet può essere formata al massimo da 79 master: facendo un rapido conto, possiamo avere fino a 632 dispositivi comunicanti.
La velocità di comunicazione è prossima ad 1 Mbps anche con piccole potenze nell'ordine di alcuni mW. In relazione alla potenza i dispositivi Bluetooth vengono distinti in classi: classe 1, 2 e 3. I dispositivi in classe 1 sono i più potenti mentre quelli di classe 3 sono i meno potenti.
Bluetooth opera nella banda ISM (Industrial Scientific Medical) che si estende tra 2.402 Ghz e 2.4835 GHz. Questa banda viene suddivisa in 79 canali ciascuno dei quali ha ampiezza di 1 MHz. La conversazione tra 2 dispositivi avviene con la tecnica TDD (Time
Division Double) in cui l’asse dei tempi viene diviso in slot e ciascun dispositivo comunica
in un dato slot.
Bluetooth permette di gestire sia i dati, sia la voce, per mezzo di due principali modalità di collegamento tra master e slave: ACL (Asynchronous Connection-Less) e SCO
(Synchronous Connection Oriented). L’SCO è un collegamento simmetrico tra un master e
uno slave e consente sia una trasmissione radio che una trasmissione voce. Principalmente viene usato per trasmissioni voce che hanno velocità di 64 kBs. Ogni master può gestire fino ad un massimo di 3 SCO simultanei. Da notare che i pacchetti SCO non vengono mai
ritrasmessi. Negli slot temporali liberi da comunicazioni SCO, il master può mandare pacchetti ACL. Le comunicazioni ACL avvengono tra un master e tutti gli slave della piconet. Un master può gestire solo un pacchetto ACL alla volta il quale può essere eventualmente ritrasmesso.
3.5.4 Scelta del protocollo radio e del relativo dispositivo
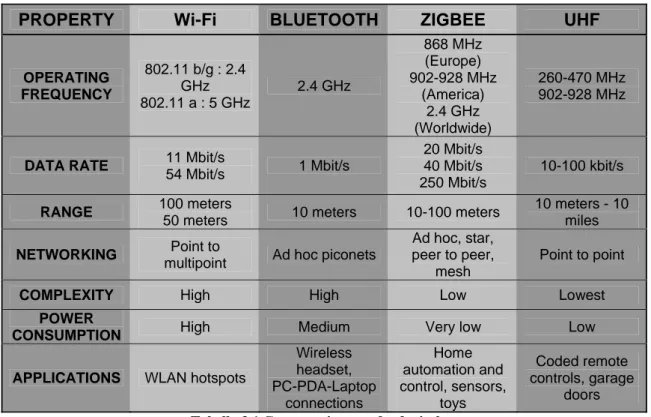
PROPERTY Wi-Fi BLUETOOTH ZIGBEE UHF
OPERATING FREQUENCY 802.11 b/g : 2.4 GHz 802.11 a : 5 GHz 2.4 GHz 868 MHz (Europe) 902-928 MHz (America) 2.4 GHz (Worldwide) 260-470 MHz 902-928 MHz
DATA RATE 11 Mbit/s
54 Mbit/s 1 Mbit/s 20 Mbit/s 40 Mbit/s 250 Mbit/s 10-100 kbit/s RANGE 100 meters
50 meters 10 meters 10-100 meters
10 meters - 10 miles
NETWORKING Point to
multipoint Ad hoc piconets
Ad hoc, star, peer to peer,
mesh
Point to point
COMPLEXITY High High Low Lowest
POWER
CONSUMPTION High Medium Very low Low
APPLICATIONS WLAN hotspots
Wireless headset, PC-PDA-Laptop connections Home automation and control, sensors, toys Coded remote controls, garage doors
Tabella 3.1 Comparativa standard wireless
Come illustrato dalla tabella sopra riportata, i protocolli analizzati sono molto diversi tra loro in quanto sono stati progettati per assolvere diversi compiti. Guardando le specifiche del nostro progetto, possiamo dedurre che Wi-Fi è decisamente troppo grande per i nostri scopi: occupa troppe risorse, ha un costo elevato e inoltre è un protocollo molto dissipativi in senso energetico. Zigbee si adatterebbe molto bene alle nostre specifiche: consuma poco, non ha bisogno di un hardware troppo complesso e può formare reti molto numerose. Purtroppo non gode di ottima disponibilità data la sua giovane età. Sul mercato infatti sono rari i dispositivi già operanti su questo standard al momento della stesura di questa tesi.
Bluetooth è quello che maggiormente si avvicina ai nostri scopi. Pensato per implementare la PAN ( Personal Area Network ), questo protocollo è piuttosto leggero ed ha un canale apposito per le comunicazioni vocali. Il motivo principale che ci ha sconsigliato l’utilizzo è il costo dei componenti che è al momento piuttosto alto: un modulo per la comunicazione Bluetooth ha un costo variabile tra 50 e 200 € (fonte Farnell).
Per la realizzazione del prototipo, la scelta è ricaduta sull’utilizzo di semplici ricetrasmettitori in UHF in quanto forniscono un servizio adeguato al nostro scopo ad un costo molto concorrenziale.
Da notare come la scelta del protocollo radio non è strettamente vincolante per il progetto in quanto le comunicazioni tra il nucleo del circuito e il modulo di trasmissione/ricezione avvengono via seriale. In questo modo è possibile cambiare il protocollo radio, qualora le condizioni di mercato lo rendano possibile, effettuando solo dei piccoli cambiamenti al nucleo del sistema.
Nell’universo dei radiomodem UHF abbiamo scelto il WIZ-903-A4 prodotto dalla AUREL.
3.5.5 Descrizione del radiomodem WIZ-903-A4
Il WIZ-903-A42 è un radiomodem “stand-alone”, completo di antenna integrata su PCB, che consente la ricetrasmissione half-duplex di dati digitali in formato TTL RS-232. E’ possibile interfacciarlo direttamente all’UART di un microprocessore esterno oppure, tramite l’adattatore di livelli elettrici W232, alla porta seriale di un PC. Il funzionamento del dispositivo è completamente trasparente all’utente; non è infatti necessaria alcuna competenza nella progettazione RF ne esiste alcuna limitazione alla dimensione del pacchetto dati: è compito del ricetrasmettitore incaricarsi della gestione del protocollo di sincronizzazione tra unità trasmittente e ricevente.
Figura 3.4: Schema a blocchi del radiomodem WIZ-903-A4
Come possiamo vedere dallo schema a blocchi, il cuore del dispositivo è il transceiver XTR-903-A4 che viene correttamente alimentato tramite un traslatore di livello. Si notano inoltre i due jumper S1 e S2 che determinano la velocità di trasmissione dei dati secondo la seguente tabella:
Tabella 3.2: Velocità di comunicazione del dispositivo
La voce ON significa “Jumper inserito” e OFF “Jumper disinserito”. Da notare che questa impostazione deve essere fatta prima della accensione del modulo in quanto la lettura dello stato logico di S1 e S2 avviene sul fronte di salita dell’alimentazione del XTR-903-A4. L’alimentazione viene fornita al dispositivo tramite il connettore J2 e può essere al massimo 6 V, mentre il consumo medio riferito al momento della trasmissione dati, è di 38 mA.
L’interfacciamento verso il mondo esterno avviene attraverso il connettore a 10 pin J1 la cui pedinatura è riportata nella tabella 3.3.
Tabella 3.3: Funzione dei piedini dell'interfaccia J1 PIN FUNZIONE 1 RS_TX (IN) 2 N.C. 3 GND 4 GND 5 RS_RX (OUT) 6 N.C. 7 485 EN. 8 N.C. 9 PWR_DWN 10 Vcc
Sulla scheda WIZ-903-A4 è integrata un’antenna loop sintonizzabile tramite un trimmer capacitivo. La presenza dell’antenna consente un utilizzo immediato del WIZ-903-A4 previa taratura della stessa. È importante sottolineare che una qualunque azione sul trimmer può comportare un non corretto funzionamento del link radio.
Il transceiver XTR-903-A4 si occupa della trasmissione e ricezione dei dati. Il componente è un multichannel transceiver a 10 canali con velocità di comunicazione impostabile dall’utente (si può scegliere tra 9600, 19200 e 38400 bps) tramite i due jumper del radiomodem S1 e S2. La selezione del canale avviene tramite comandi di tipo ‘AT’, così come la selezione della potenza in uscita (da –8 dBm a +10 dBm) e la possibilità di monitorare il grado di occupazione del canale. La modulazione è GFSK che garantisce una maggiore immunità ai disturbi rispetto alla modulazione d’ampiezza: è possibile coprire distanze superiori a 200 m in aria libera con antenne omnidirezionali. I tempi di commutazione garantiscono uno shift temporale max di 20 ms tra l’invio dei dati e la loro effettiva ricezione: questo minimo ritardo include il tempo necessario al modulo per commutare da RX a TX e trasmettere un header di sincronizzazione.
Le modalità di funzionamento si possono riassumere in 6 stati (vedi fig. 3.5): • Test Mode
• Idle Mode
• RF Transmit Mode • RF Receive Mode • Power Down Mode • Command Mode
Figura 3.5: Modalità di funzionamento del tranceiver XTR-903-A4
Nella modalità Test Mode si ha la trasmissione continua a RF di una portante modulata da un segnale a 20 kHz costituito da una sequenza di dati pseudorandom. Per uscire da questo stato è necessario togliere l’alimentazione e scegliere una nuova configurazione di SP1 e SP2.
L’Idle Mode è lo stato iniziale di riposo in cui viene a trovarsi il dispositivo all’accensione
(se SP1 ed SP2 non forzano in Test Mode il dispositivo): in tale modalità di funzionamento il transceiver è in attesa di ricevere dati dalla radiofrequenza o dalla linea seriale RSTX. Il dispositivo si porta nella condizione RF Transmit Mode quando sulla linea di input RSTX (pin 14) è presente uno start bit (livello logico basso, 0V). La modalità di trasferimento via RF dei dati seriali in ingresso è trasparente e non aggiunge nessuna
checksum o CRC: la discriminazione tra pacchetti validi e pacchetti eventualmente corrotti è lasciata all’utente.
La commutazione da Idle a RF Receive Mode avviene appena il modulo riconosce il preambolo di sincronismo sulla RF. Da questo punto in avanti il transceiver rimane agganciato in ricezione fintanto che non viene ricevuta la sequenza di chiusura del pacchetto. I dati ricevuti dalla RF vengono resi disponibili sulla linea RSRX (pin 12). Qualunque dato in ingresso sulla linea RSTX (pin 14) mentre il modulo è in RF Receive
Mode viene ignorato.
Portando a livello alto (+3V) il pin 16 (PWRDN), il dispositivo entra in uno stato di risparmio energetico (Power Down Mode), limitando il consumo a meno di 10 μA: in tale modalità il transceiver non è in grado né di ricevere, né di trasmettere e occorre portare a livello basso (0V) il pin 16 per riportarlo ad un normale stato operativo. In questo stato la linea RSTX va mantenuta a livello logico alto per evitare un erroneo invio di dati al riavvio del modulo.
Lo stato di Command Mode consente all’utente di configurare i principali parametri di funzionamento del dispositivo. La programmazione avviene mediante comandi tipo ‘AT’ inviati sulla linea RSTX. Le risposte del modulo saranno date sulla stessa linea. Per entrare in Command Mode dallo stato di Idle occorre inviare sulla linea RSTX una sequenza di 3 caratteri ASCII più (+++) consecutivi, senza tempi d’attesa tra di essi. Il modulo darà conferma dell’entrata in modalità programmazione dopo circa 35ms dall’entrata dell’ultimo carattere ’+’. I comandi che possono essere dati al modulo XTR-903-A4 e quindi al WIZ-903-A4, riguardano la lettura e la scrittura di registri contenenti impostazioni sul funzionamento del dispositivo. La lettura e la scrittura dei registri di configurazione e l’invio di comandi al modulo avviene facendo precedere al nome del comando o del registro la sequenza ’AT’ e deve concludersi con i caratteri ASCII <CR> e <RF>. I registri programmabili sono 16 (da S1 a S16); alcuni possono essere solo letti mentre altri possono essere sia scritti che letti.
Tabella 3.4: Elenco dei registri disponibili
Il transceiver può rispondere ai comandi inviando il dato corrispondente alla lettura del registro, oppure con la stringa “OK” indicante il corretto svolgimento delle operazioni, “ERROR” per indicare che c’è stato un problema, oppure “NO ACCESS” in caso sia stata richiesta una operazione vietata.
3.6 Blocco di alimentazione
Per soddisfare la specifica dell’alimentazione propria, il dispositivo deve essere alimentato tramite batterie.
Viste le necessità di alimentazione del microcontrollore (da 2,7 V a 5,5 V), del rice/trasmettitore radio (5 V) e le necessità del circuito di emissione IR, abbiamo scelto una tensione di alimentazione di 5 V.
La scelta del tipo di batteria da utilizzare deve essere dettata sia dal lato economico, sia dal punto di vista della durata e dalla possibilità di ricarica. L’utilizzo delle batterie alcaline è stato subito scartato in quanto non offrono prestazioni adeguate dal punto di vista ambientale ed economico visto che sono usa e getta. Anche le batterie alcaline ricaricabili sono state scartate in quanto a fronte di una buona economicità, presentano un ridotto ciclo di vita. La scelta si è quindi orientata tra batterie Ni-Cd, Ni-Mh e Li-Ion.
Parlando di densità volumetrica o gravimetrica di energia, le batterie agli ioni di litio sono sicuramente le migliori, come si vede anche dalla tabella sotto riportata.
Tabella 3.5: Densità volumetrica e gravimetrica di energia tra diversi tipi di batterie
Come evidenziato dalla tabella il vantaggio delle batterie Li-Ion in termini gravimetrici è molto grande rispetto alle altre batterie: questo significa che è possibile fare una batteria al litio molto più leggera senza sacrificare niente in termini di durata o energia.
Le batterie Li-Ion sono nettamente superiori anche sotto l’aspetto dell’effetto memoria (dal quale sono quasi totalmente esenti) e dal fattore di auto scarica più basso rispetto alle concorrenti.
Dall’analisi di questi fattori, le batterie agli ioni di litio risultano migliori rispetto alle altre. In realtà questo non è vero in quanto ci sono altri aspetti in cui la tecnologia a base di Nichel risulta migliore. Uno di questi riguarda il tempo di ricarica che può essere molto breve con le batterie Ni-Mh o Ni-Cd (utilizzando appositi circuiti si può arrivare a 15 minuti di ricarica) mentre quelle agli ioni di litio hanno tempi di ricarica più lunghi e inoltre richiedono circuiti molto più complessi. Un altro aspetto a favore delle batterie al Nichel è la stabilità della tensione nel tempo; mantengono infatti un livello di tensione pressoché costante nel tempo, al contrario di quelle agli ioni di litio, come indicato in figura.
Figura 3.6: Grafico della tensione in funzione del tempo
Infine il lato economico vede nettamente in vantaggio le batterie al nichel, sia per il costo degli elementi stessi, sia per quello del caricabatterie.
Tra la tecnologia Ni-Mh e Ni-Cd la prima è in vantaggio rispetto alla seconda, sia per densità gravimetrica e volumetrica di energia, sia per la minor sensibilità all’effetto memoria.
Abbiamo deciso quindi di utilizzare quattro batterie di tipo AA (comunemente dette “stilo”) al Ni-Mh in modo da ottenere una tensione di circa 5 V.
Per fare una stima della durata delle batterie, dobbiamo valutare i consumi del dispositivo nelle peggiori condizioni. Questo significa ipotizzare che il circuito sia sempre in fase di ricezione segnale radio ed emissione di segnali IR. Dal data sheet della Atmel ricaviamo l’assorbimento di corrente del microcontrollore pari a 15 mA durante il funzionamento attivo, mentre per il blocco radio abbiamo il massimo assorbimento di corrente (pari a 40 mA) durante la trasmissione. Infine il blocco di invio raggi IR assorbe circa 710 mA, supponendo che durante l’invio di un segnale i bjt rimangano sempre accesi. Questa ovviamente è un’enorme sovrastima in quanto durante la trasmissione di ogni singolo bit, si verifica una fase di spegnimento e una di accensione che riduce il consumo a circa la metà. Dunque l’assorbimento di potenza massimo del nostro dispositivo è di 3.8 W (che si riducono a 2 W considerando che il circuito di emissione IR emetta per metà periodo di bit).
Le batterie utilizzate nella realizzazione del prototipo sono delle stilo da 2400 mAh con un contenuto energetico approssimativo di 43.2 kJ. I dati ricavati ci permettono di stimare la
durata delle batterie a circa 3 ore (che diventano 6 nel caso in cui si consideri un assorbimento di potenza pari a 2 W) di ricezione dati e invio segnali IR continuativo. Il valore ottenuto sembra basso, ma considerando che l’invio di un segnale IR dura in media 10 ms, possiamo affermare che le batterie scelte permettono l’invio di circa un milione di messaggi nel caso di peggior consumo.