Presentazione del problema
Presentazione del problema
Il lavoro che segue è la realizzazione di un prototipo robotico basato sul modello biologico della lampreda marina.
L’ambito di questa tesi è quello della “robotica bioispirata”, una disciplina che mira allo sviluppo di macchine robotiche ad elevate prestazioni, nelle quali la progettazione è anche guidata dall’osservazione del mondo biologico. Nello specifico si è affrontato il settore della robotica subacquea particolarmente interessante per le sue applicazioni di esplorazione e monitoraggio di luoghi difficilmente accessibili, sia dal punto di vista della pericolosità che da quello relativo ad ambienti confinati come condutture o cavità. Le basi di questa ricerca sono state sviluppate a partire da recenti studi in campi d’interesse convergenti, come i sistemi robotici subacquei, le tecnologie biomimetiche, i modelli biologici di locomozione, gli algoritmi di controllo per la locomozione dinamica del robot.
Si è scelto questo essere in quanto su di esso studi neuronali hanno permesso di ricostruire in maniera completa il sistema di reti spinali presenti, riuscendo a comprenderne esattamente il meccanismo di locomozione. Tale sistema si attua attraverso la trasmissione degli impulsi, dal sistema nervoso centrale ai muscoli, necessaria per il compimento degli atti locomotori ritmici della lampreda, rappresentati da movimenti ondulatori che ne permettono il nuoto.
Inoltre tale animale è considerato uno dei primordiali vertebrati, per cui riuscire a riprodurne fedelmente il moto può risultare utile per comprendere a pieno come ricreare robot bioispirati a esseri superiori, infatti il sistema nervoso vertebrale è organizzato in maniera simile sebbene tra specie e specie il livello di complessità vari notevolmente. Nella lampreda esso è particolarmente semplice, fino ad arrivare all’uomo dove è notevolmente complesso, pur mantenendo entrambi gli apparati le stesse caratteristiche generali.
La lampreda può quindi essere considerata un prototipo di vertebrato con il notevole vantaggio di avere pochi neuroni rispetto ai vertebrati maggiori, ed è così stato possibile ricostruire artificialmente in dettaglio il funzionamento dell’intero sistema nervoso centrale responsabile della locomozione.
Presentazione del problema Quanto ideato è stato preliminarmente presentato al Prof. Grillner presso il Dipartimento di Neuroscienze dell’ Istituto Nobel per la Neurofisiologia, il Karolinska Institute di Stoccolma, il quale, occupandosi da vari anni dello studio del sistema neurologico della lampreda, è riuscito con il suo team a ricostruire il modello del funzionamento del sistema nervoso vertebrale presente su questo essere.
L’approccio che si è concepito è risultato aderente al reale comportamento dell’animale ed in base alle discussioni affrontate sono state individuate le linea guida verso le quali indirizzare il progetto.
Si sono evidenziati dei possibili campi di interesse dal punto di vista neuroscientifico, come il problema dei movimenti tridimensionali scarsamente affrontato nei robot di questo tipo già esistenti, la possibilità di decidere come e quando effettuare un cambio direzionale in funzione dell’ambiente circostante e del tipo di comportamento adottato, la presenza di un sistema vestibolare usato dalla lampreda per mantenere una caratteristica configurazione del corpo durante la locomozione, integrato con un sistema di visione da usare per decidere il comportamento da tenere durante il moto a seconda degli ostacoli presenti durante le future sperimentazioni.
Per concepire questo prototipo artificiale si sono prese a riferimento le dimensioni tipiche di un individuo adulto di lampreda, suddividendo il robot in vari moduli identici ma separati, e privilegiando per ogni modulo la soluzione realizzativa più semplice e meno artificiosa tra le varie ideate. Infine si è aggiunto alla struttura, una testa e una coda sagomate in modo tale da conferire una forma naturale al modello.
Al fine di sviluppare siffatto robot biomimetico si è poi esaminato come in natura tale essere si comporta, sia dal punto di vista dell’ habitat dove vive e si riproduce, sia ricercando le reazioni tipiche manifestate a stimoli esterni variabili, questo per capire il tipo di sensorizzazione, da inserire in un secondo momento, allo scopo di sperimentarne la locomozione in un possibile ambiente naturale ricreato artificialmente. Esaminando lo stato dell’arte delle lamprede artificiali gia create, si è impostato il progetto del robot cercando di superare i limiti riscontrati nei vari modelli esistenti, sia quelli più concettuali e relativi al tipo di criterio di ideazione scelto, sia quelli più strettamente inerenti a soluzioni attuate che non sembrano avere riscontri sperimentali realmente biomorfi, rendendo l’automa creato poco aderente al comportamento reale della lampreda.
Presentazione del problema Punto di partenza è stata la concezione di un approccio totalmente diverso al problema, con il preciso scopo di ricostruire in maniera fedele il sistema di movimentazione della lampreda ottenendo una struttura muscolare attuabile a comando.
La tesi è stata quindi strutturata in 6 capitoli distinti. Il primo si occupa di dare una breve e generale descrizione della lampreda marina sia dal punto di vista morfologico che comportamentale, si effettua una sintetica analisi relativa allo stato dell’arte di questo tipo di robot evidenziando pregi e difetti dei robot esistenti. Successivamente si analizza in dettaglio il funzionamento del sistema nervoso centrale responsabile della locomozione con lo scopo di comprendere a fondo come si attua la trasmissione degli impulsi per la generazione del moto.
Nel secondo capitolo si è affrontata la progettazione del robot in relazione alle dimensioni e alla forma da far assumere alla lampreda artificiale caratterizzando in modo particolare il percorso che ha portato alla realizzazione dei moduli in cui il robot è stato suddiviso.
Proseguendo col terzo capitolo si affronta il problema della realizzazione della notocorda artificiale utilizzata per ricostruire la corda spinale della lampreda ed il tipo di collegamento necessario per connettere tra loro i vari moduli al fine di effettuare la movimentazione dei blocchi di attuatori. Inoltre si è discusso anche dell’involucro da produrre per assicurare la tenuta al robot durante le sperimentazioni in acqua.
Nel quarto capitolo si è presentato il principio di funzionamento dell’attuazione della serie di moduli descritta nel precedente capitolo. Si è poi affrontato il problema della modifica, attraverso la progettazione di un apposito meccanismo, della forza in uscita al moto degli attuatori che presenta un andamento non bioispirato.
Passo seguente descritto nel quinto capitolo è la realizzazione del sistema di controllo del robot e l’ideazioni del tipo di sperimentazione da effettuare ricreando un ambiente artificiale per le prove di moto.
Infine nel sesto e ultimo capitolo si evidenziano le conclusioni a cui siamo pervenuti con il progetto di questo robot e i futuri sviluppi del lavoro affrontato.
1 – Introduzione
1
– Introduzione
1.1
Lampreda marina
Figura 1.1 : sea lamprey
La lampreda non è un vero e proprio pesce. Il nome scientifico, Ciclostoma, significa “bocca rotonda” a causa della tipica forma circolare della sua bocca che rimane sempre aperta, in quanto sostenuta da un anello cartilagineo necessario per ovviare all’assenza di mascelle. La sua forma è analoga a quella dell’anguilla, con un corpo cilindrico che termina a punta, compresso nella parte posteriore. La lunghezza degli individui adulti variano in media tra i 600 ed gli 800 mm con un diametro medio compreso tra i 50 ed i 70 mm, calcolato considerando un rapporto lunghezza/diametro di circa 12, il peso oscilla tra 1 e 2.5 kg.
Di particolare interesse è la presenza di una struttura endoscheletrica cartilaginea che ricopre la notocorda, per questo la lampreda viene classificata tra i Provertebrati. Questi organismi sono tra i più interessanti per studiare le linee evolutive che portano agli animali superiori in quanto loro diretti antenati. Infatti si pensa che lo sviluppo dei vertebrati sia partito proprio da questi esseri acquatici e successivamente, data la necessità di compiere movimenti sulla terra ferma, sia stato necessario sviluppare arti come gambe o apparati simili, in grado di ovviare agli inconvenienti dovuti al moto in aria dove la presenza della forza di gravità ostacola la possibilità di una locomozione ondulatoria, locomozione quest’ultima possibile in acqua grazie alla scarsa influenza sui movimenti della forza peso a causa dell’intervento della spinta idrostatica.
1 – Introduzione Le larve sono dette ammoceti, ricercano fondali fangosi e acque calme dove permangono in media 5-6 anni, tempo necessario per trasformarsi in lamprede adulte. Una volta completata la mutazione scendono verso il mare dove sostano per tre o quattro anni nelle zone litoranee in acque poco profonde.
Raggiunta la maturità sessuale, compiono una nuova migrazione risalendo i fiumi dal mare in cerca di località adatte alla riproduzione. Non tutti i corsi d’acqua vengono risaliti indistintamente, vengono scelti quelli con acque non troppo fredde, pure e ben ossigenate e inoltre sono predisposte di particolari organi recettori che permettono di riconoscere il torrente di provenienza dallo stadio larvale. Preferiscono fondali fangosi e ghiaiosi e le zone luminose dei fiumi e dei ruscelli con acque ferme, ma soprattutto il loro corso superiore con acque correnti.
Si è svolta una ricerca anche sul tipo di habitat e sul comportamento tenuto dalla lampreda per poter ricreare un ambiente fedele al naturale dove poter effettuare sperimentazioni sulla locomozione.
1.2
Stato dell’arte
I robot biomimetici sono concepiti per imitare sistemi biologici o utilizzare tecnologie sviluppate ispirandosi a soluzioni realizzative adottate in natura.
Sono state progettate vari tipi di lamprede robotiche. Ad esempio il lamprey robot costruito alla Northeastern University [1] si basa su un robot costituito da una colonna vertebrale di poliuretano, comandata da attuatori costituiti da leghe a memoria di forma (SMA), cioè leghe metalliche che hanno la capacità di ritornare ad una determinata forma se riscaldate. A seguito di questo cambiamento di forma, il dispositivo SMA può applicare forze all’esterno e quindi essere impiegato come attuatore. La parte anteriore rappresentante la testa del robot è costituita da un guscio di Plexiglas contenente la sensoristica elettronica, inoltre nella parte terminale è stata aggiunta una coda non attuata per motivi fluidodinamici. Il prototipo realizzato è rappresentato nella seguente figura 1.2
1 – Introduzione
Figura 1.2 : Robot Lampreda
Questo robot ha la possibilità di effettuare movimenti solo nel piano, non permettendo quindi un’orientazione tridimensionale, ed inoltre a causa del tipo di attuazione scelto il controllo viene effettuato sulla posizione e non sulla forza trasmessa, aspetto questo che non riproduce la natura del muscolo, dove il controllo è in funzione della forza applicata.
Altro esempio di robot biomimetico è il REEL robot [2], riportato in figura 1.3. La parte meccanica è costituita da una serie di lamine di alluminio connesse da servomotori utilizzati per l’attuazione dei giunti, il tutto contenuto in gusci di plastica impiegati per riprodurre la forma della lampreda rendendola aerodinamica durante il nuoto e ricreando tramite zone cave la densità voluta.
Per la tenuta è stata utilizzata un resina impermeabilizzante necessaria per isolare i vari componenti elettrici dei servomotori.
1 – Introduzione Neanche in questo robot è presente la possibilità di orientazione nello spazio, e il tipo di attuazione implica un movimento rotatorio dei vari giunti che mal riproduce il reale andamento ondulatorio della lampreda.
Esistono anche altri robot similari ai precedenti, come quello riportato in figura 1.4 e realizzato dalla collaborazione di vari istituti di ricerca [3].
Figura 1.4 : AmphiBot I
Anche in questo caso la movimentazione è dovuta a sistemi meccanici di rotismi attuati da motorini che operano in corrente continua come mostrato in figura 1.5.
Figura 1.5 : meccanismo di attuazione
Pur essendo questa una soluzione ingegnosa e accuratamente progettata sia da un punto di vista meccanico che rispetto al tipo di alimentazione con una batteria inserita in ogni modulo, permangono diversi punti essenziali che rendono il complesso del robot troppo artificioso dal punto di vista motorio.
1 – Introduzione Importante è mettere in evidenza quali sono le criticità presenti in tutti i modelli esaminati. Uno degli aspetti che rendono questo tipo di robot poco bioispirati è l’attuazione con servomotori che tipicamente non sono comandati in forza, in contrasto con quello che è il naturale controllo adottato dai muscoli dove è la forza di attuazione l’elemento predominante nella generazione del movimento e lo spostamento subito è solo un effetto secondario della contrazione avvenuta.
Questo rende lo sviluppo del moto eccessivamente artificiale, mostrando una rigidità indesiderata del corpo unita all’assenza di un naturale ritorno passivo nella configurazione di riposo e all’impossibilità di un libero movimento nello spazio.
AItro aspetto svantaggioso è il fatto di possedere pochi gradi di libertà per segmento (tipicamente uno).
Non si ottiene quindi in nessun caso una naturale ricostruzione del moto originario. Il robot da noi ideato si prefigge lo scopo di ottenere un complesso muscolo-scheletrico analogo a quello della lampreda reale.
Partendo da un approccio di tipo muscle-like, ovvero dall’idea di riprodurre una struttura muscolare artificiale, si vuole realizzare un sistema equivalente a quello adottato in natura dalla lampreda per compiere i propri movimenti tipici, compreso quindi il potersi liberamente orientare in tutto il volume di azione.
Per fare ciò si fissa l’obiettivo di ricreare una struttura di muscoli agonisti/antagonisti come quella presente sulla lampreda ottenendo la possibilità di libero e naturale moto comandato come in natura da un sistema centrale di controllo che alimenti gli attuatori a seconda del movimento da compiere o in funzione degli ostacoli presenti nel percorso del moto.
1.3
Sistema di locomozione
I comportamenti motori degli esseri viventi sono generati da reti neuronali localizzate nel sistema nervoso centrale. Nei vertebrati le reti neuronali presenti nella parte ventrale del midollo spinale sono responsabili della generazione dei comportamenti locomotori ritmici, come l’atto del camminare o del nuotare, anche in assenza di afferenze cerebrali o sensoriali.
1 – Introduzione Tali reti spinali, note anche come “central pattern generators” (CPGs), sono spesso adottate quale modello sperimentale relativamente semplificato al fine di comprendere i fenomeni emergenti dall’attività elettrofisiologia collettiva di più neuroni interagenti, anche in altri distretti del sistema nervoso centrale.
Nella lampreda, a seguito di sperimentazioni in vivo ed in vitro si è giunti ad una buona comprensione del funzionamento delle CPGs spinali che ne controllano la locomozione, grazie alla bassa complessità del sistema ed alla presenza di un numero limitato di neuroni che ha permesso non solo di scoprire le differenti reti neurali presenti, ma anche le funzioni intrinseche di queste reti in termini di interazione con i neuroni, di trasmissione dati, fornendo un dettagliato modello computazionale basato su fatti dedotti sperimentale dalle reti individuate e dall’esecuzione comportamentale.
Prove ricavata direttamente ed indirettamente hanno indicato che le conoscenze ottenute nei modelli dei vertebrati inferiori come la lampreda possono essere applicate a esseri superiori.
Sebbene questi ultimi siano più avanzati, gli stessi generali principi di controllo sono ugualmente applicabili. Anche se l’evoluzione ha progressivamente favorito la comparsa di pinne o gambe i movimenti sono in ogni caso relazionati in funzione del mondo circostante che richiede una veloce interpretazione del terreno contiguo e della localizzazione degli ostacoli.
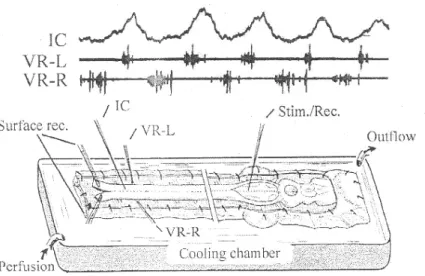
La corda spinale della lampreda può essere mantenuta in vita in isolamento per diversi giorni avendo così la possibilità di riprodurre li sistema nervoso che attua il moto attraverso la stimolazione dei centri di locomozione dell’encefalo.
Come si nota dalla figura 1.6, l’attività motoria può essere registrata nelle radici ventrali (VR) che normalmente attivano i muscoli sul lato sinistro (L) e destro (R).
L’attività nelle singole celle o nelle coppie di esse può essere registrata attraverso dei microelettrodi (IC). Una registrazione di una rete neurale di tale tipo è mostrata in alto nella figura insieme alla riproduzione dell’attività del moto alternato nelle radici ventrali sul lato destro e sinistro.
1 – Introduzione
Figura 1.6 : preparazione in vitro della lampreda
La camera di sperimentazione viene mantenuta fredda ad una temperatura compresa tra 4 – 7 °C e viene continuamente alimentata con soluzione fisiologica.
Si analizzerà adesso l’intrinseco funzionamento delle reti spinali addette alla generazione della locomozione, esaminando in maniera dettagliata il coordinamento tra i segmenti in cui la lampreda può essere suddivisa, il meccanismo di curvatura ed il ruolo dei differenti tipi di segnali inviati in retroazione dai sensori durante il moto.
I movimenti sono generati da reti dedicate di cellule nervose che contengono le informazioni necessarie ad attivare i diversi neuroni del moto(MN) nell’appropriata sequenza e intensità al fine di creare il movimento voluto. Queste reti sono riferite ad un sistema neurale centrale, il CPGs appunto.
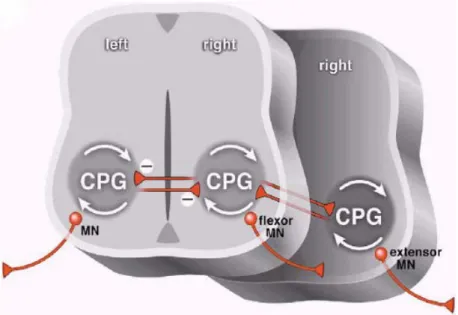
Nella seguente figura 1.7 si riporta lo schema di tale sistema dal quale si intuisce la strategia di controllo della locomozione del vertebrato.
Dall’ analisi di figura 1.7 si nota nella parte superiore lo schema di comunicazione esistente tra proencefalo, encefalo verso la corda spinale la quale è in grado di generare l’attività locomotoria ritmica.
1 – Introduzione
Figura 1.7 : CPGs lampreda
Questi movimenti vengono prodotti grazie ai segnali inviati sia dal Basal Ganglia, sia attraverso il sistema di sensori visualizzato cerchiato nella parte inferiore della figura. È proprio questo secondo aspetto che si è rivelato maggiormente interessante per l’ideazione del robot lampreda. Preme mettere in evidenza il principio di funzionamento di questa schematizzazione. La presenza dei sensori ai lati del modello consente di avere in input informazioni provenienti dall’ambiente circostante. Queste informazioni vengono trasferite poi ai recettori di allungamento che eccitano a loro volta neuroni eccitatori o inibitori a seconda del tipo di contrazione da voler far compiere al corpo. Questi neuroni trasmettono immediatamente il comando ai muscoli provocandone l’eccitazione oppure operandone il rilascio riuscendo così ad eseguire la tipica ondulazione di questo genere di animali.
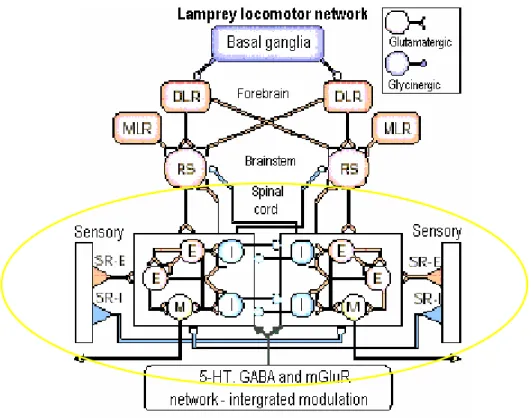
Si mostra in dettaglio il principio di funzionamento dello schema di figura 1.7. Per fare ciò si faccia riferimento alla figura 1.8 nella quale sono rappresentati anche i diversi tipi di sensori utilizzati in natura dalla lampreda.
1 – Introduzione
Figura 1.8 : rete di locomozione della lampreda
Il reticolospinale (RS) è costituito da neuroni che eccitano tutte le classi di interneuroni e motoneuroni spinali. Gli interneuroni eccitatori (E) eccitano tutti i tipi di neuroni spinali, così gli interneuroni inibitori (I) attraversano la linea mediana per inibire tutti i tipi di neuroni presenti dall’altra parte, gli interneuroni laterali (L) inibiscono gli interneuroni (I) e i motoneuroni (M).
I neuroni recettori di allungamento sono di due tipi : uno eccitatore (SR-E) che eccita i neuroni ipsilaterali, e uno inibitore (SR-I) che attraversa la linea di mezzo per inibire i neuroni controlaterali.
1 – Introduzione I neuroni RS ricevono input eccitatori sinaptici dalle afferenze sensoriali cutanee (Trigem), dalla regione locomotoria mesencefalica (MLR) e dal talamo ventrale (VTH) il quale riceve informazioni dal basal ganglia come dati visivi e olfattivi.
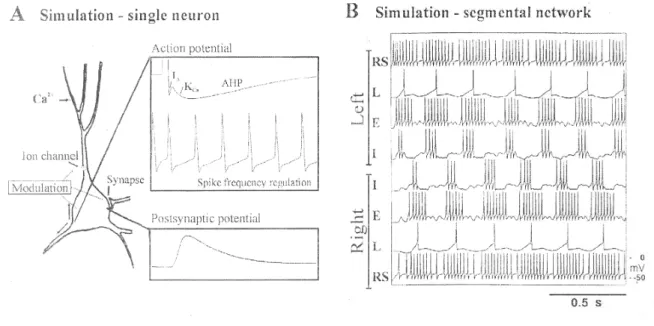
Nella seguente figura 1.9 si riporta il modello simulativo della rete di locomozione della lampreda , sia del singolo neurone che dell’intero segmento neurale.
Figura 1.9 : modello simulativi della rete di locomozione
Il moto della lampreda si presenta a vari gradi come un’onda meccanica che si propaga dalla testa alla coda incrementando la propria amplitudine per generare i movimenti. Questa onda propulsiva spinge l’animale avanti nell’acqua attraverso la consecutiva attuazione dei segmenti in cui è virtualmente suddiviso il corpo. Il ritardo tra l’attivazione dei segmenti è variabile ma rimane comunque sempre una porzione fissa della durata del ciclo se quest’ultimo è compreso tra 10 s e 0.1 s. Questo ritardo è riferito ad un costante ritardo di fase. Nella lampreda è circa l’1% tra due successivi segmenti.
Nella lampreda il ritardo di fase può essere modificato e anche invertito allo scopo di generare un’onda dalla coda alla testa necessaria per ottenere l’inversione del moto. Questo accade quando la lampreda è intrappolata in un angolo, nuoterà all’indietro per pochi movimenti del ciclo per poi girarsi e nuotare via a dritto.
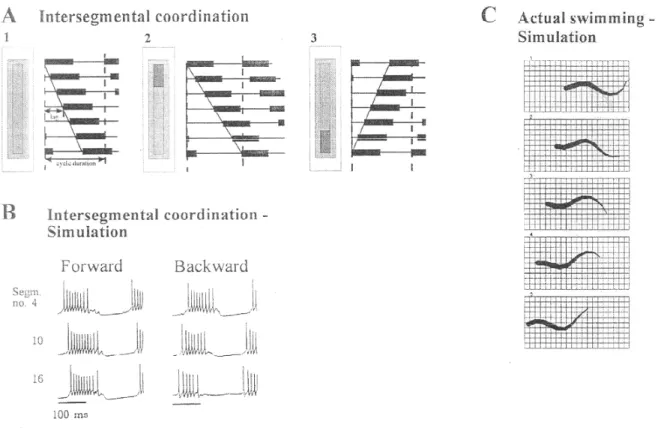
1 – Introduzione Per comprendere a pieno i meccanismi della coordinazione intersegmentale sono stati modellati dei processi utilizzando la connessione neurale con asimmetria tra i neuroni eccitatori e inibitori.
Figura 1.10 : coordinazione intersegmentale
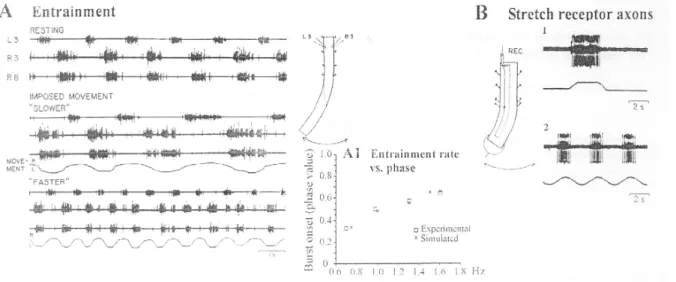
In figura 1.10 immagine A, si può notare come la corda spinale isolata della lampreda possa produrre un ritardo di fase rostro-caudale idoneo per il compimento del moto in avanti (1). Un incremento del comando di moto (regione nera di figura) nella parte anteriore della corda spinale (2) produce un incremento del ritardo di fase. Aumentando l’eccitazione che produce i movimenti nella parte terminale (3) si ha un ritardo di fase invertito corrispondente al moto all’indietro.
L’immagine B mostra una simulazione della coordinazione intersegmentale prodotto attraverso un modello di rete neurale costituito da 60 segmenti. Questo circuito produrrà un ritardo di fase rostro-caudale lunga la corda spinale simulata e questo ritardo potrà essere invertito incrementando l’eccitabilità della parte caudale.
1 – Introduzione Nella figura C si ha una simulazione di attuazione del moto realizzata attraverso l’utilizzo di un modello neuro-meccanico.
La sequenza mostra delle fasi di moto a 4 Hz, con un modello di lampreda che si muove ad una velocità di 0.73 ms-1.
Nella seguente figura 1.11 viene esemplificato il caso in cui la parte caudale della notocorda insieme alla corda spinale venga mossa, indietro e avanti, allo stesso ritmo adottato per la generazione del moto ottenendo la generazione dei movimenti. Chiaramente l’input dei sensori prodotto dal movimento è sufficiente a prendere il controllo sulla rete centrale neurale nel giro di un certo intervallo di frequenze imposto.
Figura 1.11 : movimenti in funzione della retroazione dei sensori
L’immagine B mostra i recettori di allungamento insieme all’attività registrata a seguito della contrazione laterale sinistra della corda spinale isolata. La figura in alto (1) è inerente ad un movimento a scalino effettuato verso destra che, provocando un allungamento del lato sinistro dove la registrazione è stata prodotta, risulta in una unica scarica ad una frequenza relazionata al grado della curvatura eseguita. La figura in basso (2) mostra invece i movimenti sinusoidali risultati a seguito di generazione di scariche della stessa intensità.
Il comportamento di un neurone recettore è decretato dal segnale proveniente dall’esterno.
1 – Introduzione In caso di presenza di ostacoli da evitare, viene inviato un segnale in grado di permettere il compimento di una curva grazie alla possibilità di variare la frequenza di attivazione del muscolo.
Attuando i muscoli agonisti/antagonisti si generano le contrazioni necessarie alla lampreda per eseguire lo specifico movimento richiesto dalla particolare circostanza. Mantenendo l’impulso attivato più a lungo si ottiene la maggior contrazione di un lato del corpo che ne decreta la curvatura.
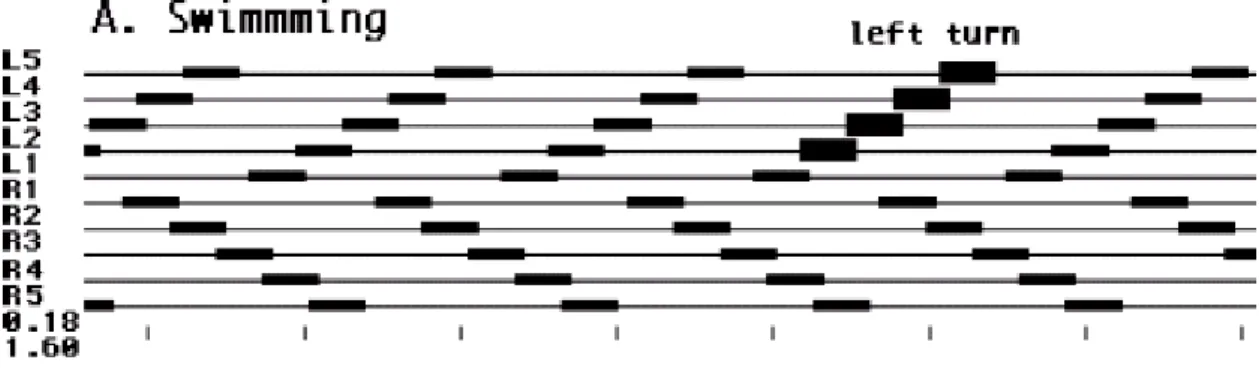
Figura 1.12 : esempio di curva a sinistra
In figura 1.12 è riportato l’esempio dell’effettuazione di una curva a sinistra. Quando lo spessore della barra è incrementato (left turn), un impulso più lungo è inviato ai muscoli del modulo preso in esame permettendo così, grazie al mantenimento per un tempo maggiore della contrazione, di ottenere un cambio di direzione.
E questo il concetto da noi utilizzato per la progettazione della locomozione del robot. Nella successiva figura 1.13 si mostra la connessione esistente tra i recettori di allungamento ed il sistema nervoso centrale adibito alla locomozione. In particolare è evidenziato l’effetto sinaptico dei neuroni recettori di allungamento.
Se il lato sinistro del sistema di generazione del moto è attivato, la muscolatura di questa parte viene attivata ottenendo di conseguenza l’allungamento del lato opposto. I recettori controlaterali (SR-Es) e (SR-Is) saranno così attivati.
1 – Introduzione
Figura 1.13 : neuroni recettori di allungamento
La retroazione dei sensori dai neuroni SR può contribuire a terminare l’attività sul lato già contratto del segmento del corpo e l’inizio di quella sull’altro lato causando la sincronizzazionedel ritmo motorio.
Nella seguente figura 1.14 è mostrata in dettaglio una coppia di singoli segmenti di muscoli che compongono la struttura della lampreda.
Figura 1.14 : elementi del segmento costituente la struttura
E’ stato analizzato in dettaglio anche il ruolo svolto dai sensori durante le fasi di moto ordinario, oppure in presenza di una qualche perturbazione esterna.
1 – Introduzione Dall’analisi di figura 1.15 si nota nell’immagine A la simulazione del sensore di sincronizzazione armonica del ritmo motorio. Una corrente sinusoidale viene applicata al modello dei neuroni recettori di allungamento su entrambi i lati con una frequenza bassa (1) oppure alta (3) rispetto al rapporto di quiete del moto (2), il quale causa fedele sincronismodel ritmo nelle reti neurali E ed I da entrambi i lati.
Proseguendo con l’analisi dell’immagine B si evidenzia la simulazione dei movimenti e il ruolo svolto dalla retroazione dei sensori durante una perturbazione esterna utilizzando un modello neuro-meccanico.
Lo schema a sinistra (1) mostra il caso di assenza di ritorno di segnale dai sensori (recettori di allungamento disconnessi) nel quale la lampreda devia dalla traiettoria rettilinea del suo moto al momento dell’ingresso in una regione (zona ombreggiata) con flusso di corrente incrementato.
Figura 1.15 : ruolo dei sensori durante il moto
Lo schema a destra (2) esemplifica invece il caso di sensori presenti (recettori connessi): il moto procede a dritto senza problemi attraverso la regione perturbata.
A
1 2 31 – Introduzione La figura C mostra la coordinazione longitudinale mantenuta dai sensori durante il moto nella corda spinale. Questa coordinazione dipende interamente dalla sincronizzazione armonica dei sensori.
Al fine di riprodurre il reale moto compiuto dalla lampreda si sono ricercati dati inerenti le traiettorie eseguite durante il nuoto. Nella seguente tabella 1 si riportano dei parametri relativi ai diversi tipi di nuotata impostati dall’animale, necessari per formare le basi per la progettazione della dinamica del controllore del veicolo.
Tabella 1 : parametri relativi al comportamento durante i diversi tipi di moto
Il periodo è stato normalizzato rispetto ad un veicolo della lunghezza di 1 m basandosi su estrapolazioni relative a misure di periodi ricavati da lamprede di dimensioni minori. Il ritardo di fase tra le porzioni del corpo, è stato calcolato rispetto ad una suddivisione della lampreda in 110 segmenti.
In base alla precedente tabella si è scelta la distanza a cui fissare i vari segmenti costituenti il robot progettato.
Attraverso simulazioni effettuate in ambiente CAD si è riprodotto la possibile curvatura massima che la lampreda può assumere in funzione della distanza intersegmentale. Essendo i dati precedenti relativi ad un modello della lunghezza di 1 m, si è impostata una proporzione per rapportarci agli ingombri del nostro robot.
Nella seguente figura 1.16 si vede in rosso l’andamento seguito in base alla curvatura riportata in tabella 1 e relativa ad una nuotata di media intensità supponendo uguale curvatura per zona anteriore e posteriore per semplificare la schematizzazione.
1 – Introduzione
Figura 1.16 : curvatura del robot
In blu nella stessa figura è riportata una possibile configurazione ottenibile dal robot, dalla quale si evince, in base ai valori delle curvature riportate, il pieno rispetto della naturale traiettoria.
Nella seguente figura 1.17 si mostra una configurazione ottenuta impostando una distanza intersegmentale di 70 mm. La testa non ruota in quanto non attuata, la coda al contrario effettua una rotazione a seguito della movimentazione eseguita dall’ultimo blocco di attuatori.