CAPITOLO VI
Esempio applicativo del metodo proposto
Viene svolta l’analisi statica non lineare, dinamica alle oscillazioni libere e sotto vibrazione forzata di una antenna strallata predimensionata con il criterio proposto nel Cap. IV, par. 4.9. Si esegue l’analisi anche sul modello semplificato a “colonna equivalente” e si confrontano i risultati ottenuti: la validità del modello semplice verrà convalidata, almeno da un punto di vista teorico.
6.1 Descrizione della struttura
Con il criterio proposto nel Cap. IV, al paragrafo 4.9, è stato eseguito il predimensionamento di un’antenna strallata in modo da poter testare la validità del metodo di analisi semplificato a “colonna equivalente” (Cap. V).
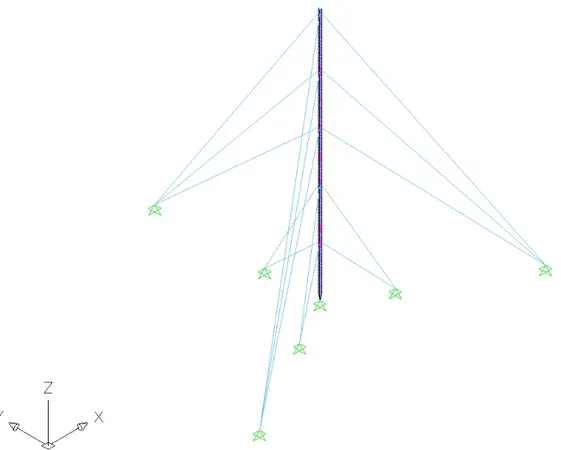
Le caratteristiche globali dell’antenna strallata sono: - altezza totale: 305 m (fig. 1);
- sezione trasversale triangolare equilatera di lato 3 m (fig. 4, 5); - 5 ordini di stralli tripli a 60, 120, 180, 240 e 300 m.
La disposizione in pianta degli stralli è a 120° e gli ancoraggi al suolo stanno su due circonferenze, concentriche all’asse verticale del’antenna, aventi 67 e 200 m di raggio (fig. 2).
La disposizione delle aste di parete è quella con diagonali a croce di S. Andrea e calastrelli orizzontali a formare delle celle aventi altezza di 3 m (fig. 3).
Figura 3 - Disposizione delle aste di parete.
Le sezioni trasversali a livello dei calastrelli, sono state irrigidite opportunamente ogni 9 m ed in corrispondenza degli attacchi con gli stralli (fig. 4, 5).
Figura 4 - Sezione trasversale tipo (quote in mm).
Il tronco di base dell’antenna è stato sagomato a forma di piramide rovescia inclinando le aste montanti (fig. 6).
6.1.1 I montanti
Questi elementi sono costituiti da profili circolari cavi in acciaio, aventi diametro esterno di 350 mm ed uno spessore di 16 mm (fig. 7).
Figura 7 - Sezione del montante.
Si riportano le caratteristiche della sezione:
diametro esterno: dext = 350 mm; diametro interno: dint = 318 mm;
area: A = 168 cm2;
momento di inerzia baricentrico: J = 23460 cm4; raggio di inerzia: ρ = 118 mm.
6.1.2 Le aste diagonali
Le aste diagonali sono realizzate con due profilati ad L 100x12 accoppiati a diastanza di 10 mm (fig. 8).
Figura 8 - Sezione dei diagonali.
Le caratteristiche della sezione sono:
momento di inerzia rispetto all’asse x: Jx = 414 cm4; momento di inerzia rispetto all’asse y: Jy = 939 cm4; raggio di inerzia rispetto all’asse x: ρx = 30.2 mm; raggio di inerzia rispetto all’asse y: ρy = 45.5 mm.
6.1.3 I calastrelli orizzontali
Le aste orizzontali del traliccio sono realizzate con due profilati ad L 80x12, accoppiati ad una distanza di 10 mm (fig. 9). Lo stesso profilo è stato utilizzato per irrigidire, ogni 9 m, i piani orizzontali oppure le sezioni del traliccio alle quote di attacco degli stralli.
Figura 9 - Sezione dei diagonali.
Le caratteristiche della sezione sono:
area: A = 35.8 cm2;
momento di inerzia rispetto all’asse x: Jx = 204 cm4; momento di inerzia rispetto all’asse y: Jy = 507 cm4; raggio di inerzia rispetto all’asse x: ρx = 23.9 mm; raggio di inerzia rispetto all’asse y: ρy = 37.6 mm.
6.1.4 Gli stralli
Tutti gli stralli sono costituiti da funi spiroidali chiuse del diametro di 50 mm; l’area della sezione è quindi 19.6 cm2.
6.2 Le proprietà dei materiali considerate nella modellazione
6.2.1 Acciaio da carpenteria metallica
Si è ipotizzato che il materiale costituente le aste del traliccio (montanti, diagonali e calastrelli) sia acciaio da carpenteria metallica tipo S 275 secondo UNI EN 10025-2. Le sue proprietà sono:
- peso specifico: γs = 78.5 kN/m3;
- densità: ρs = 7850 kg/m3;
- modulo elastico E = 210000 N/mm2;
- coefficiente di Poisson: υ = 0.3;
- modulo di elasticità tangenziale: G = 80770 N/mm2; - coefficiente di espansione termica: α = 1.2 ⋅ 10-5; - tensione caratteristica di snervamento: fyk = 275 N/mm2; - tensione caratteristica di rottura: ftk = 430 N/mm2. Il legame costitutivo è elastico lineare secondo la legge di Hooke.
6.2.2 Acciaio in trefoli: il legame costitutivo per gli stralli
Per ciò che riguarda gli stralli si sono considerate le seguenti proprietà per l’acciaio in trefoli:
- peso specifico: γs = 78.5 kN/m3;
- densità: ρs = 7850 kg/m3;
- modulo elastico finale: E = 196000 N/mm2; - coefficiente di Poisson: υ = 0.3;
- tensione caratteristica di rottura: ftk = 1860 N/mm2; - tensione all’1% della deformazione: f1k = 1670 N/mm2.
Si è considerato che il legame sforzo – deformazione sia variabile secondo il modulo di Dishinger: E st σ
( )
E 1 γ s 2 l2 ⋅ E⋅ σ3 +in cui:
l lunghezza dello strallo; σ tensione nello strallo.
Per gli stralli che fanno capo al primo ordine (quota 60 m) si ottiene: l = 88660 mm (lunghezza dello strallo)
Per gli stralli che fanno capo al secondo ordine (quota 120 m) si ha: l = 136600 mm (lunghezza dello strallo)
Per gli stralli che fanno capo al terzo ordine (quota 180 m) si ha: l = 267800 mm (lunghezza dello strallo)
Per gli stralli che fanno capo al quarto ordine (quota 240 m) si ha: l = 311300 mm (lunghezza dello strallo)
Infine, per gli stralli che fanno capo al quinto ordine (quota 300 m), si ha: l = 359600 mm (lunghezza dello strallo)
intorno ai 500 N/mm2. Per gli stralli più lunghi, invece, la non linearità materiale si estende fino a tensioni attorno ai 1000 N/mm2.
Si capisce dunque che quanto più gli stralli sono tesi, tanto più il loro comportamento si avvicinerà al lineare.
Poiché durante l’azione dinamica del vento (o del sisma) tutti gli stralli possono trovarsi alternativamente in una zona sopravento o sottovento (cioè vengono tesi maggiormente o scaricati), il loro comportamento passa da “quasi lineare” a non lineare.
Si rendono dunque assolutamente necessari opportuni valori della pretensione (vedi par. 6.5.2) in modo che gli stralli temporaneamente sottovento non si “allentino” troppo e manifestino marcata non linearità. Di fondamentale importanza è che non riducano a 0 la loro tensione: in questo caso si avrebbe la disattivazione dello strallo che non parteciperebbe più al sostegno dell’antenna, aggravando lo stress negli altri stralli (quelli simmetricamente opposti).
6.3 Il modello dettagliato della struttura
6.3.1 Modellazione delle aste
Le aste che costituiscono il traliccio reticolare dell’antenna sono state modellate con elementi frame aventi sezioni assegnate come visto nel par. 6.2. Per ottenere dei risultati variabili in modo continuo (non linearizzato) lungo un elemento, si è impostato il numero minimo di “stazioni di output” a 6 e all’intersezione di più elementi. Ad esempio, i montanti sono formati da una serie di elementi frame della lunghezza di 3 m: in un singolo elemento si ha l’output di un certo effetto (sollecitazione o deformazione) ogni 50 cm.
Tutte le aste di parete (diagonali e calastrelli) vengono solidarizzate ai montanti mediante fazzoletti in acciaio e ivi imbullonate (fig. 3): il collegamento così ottenuto ha scarsa resistenza a flessione ed è stato schematizzato nel modello come una cerniera.
Viceversa i montanti, che forniscono il contributo maggiore alla resistenza del traliccio, sono stati schematizzati come continui. In effetti essi presentano dei
giunti flangiati per poter montare in officina dei moduli della lunghezza di circa 10 m che poi vengono trasportati ed assemblati in cantiere. Questi giunti, anche se rappresentano una discontinuità nel montante, dovranno essere dimensionati per resistere a flessione.
Particolare attenzione è stata posta nell’assegnazione dei rilasci di estremità al fine di non creare dei meccanismi labili che impedirebbero la convergenza dell’analisi: una situazione tipica è nel nodo di incontro delle aste diagonali (fig. 10).
(a) (b) (c)
Figura 10 – Frames del traliccio (a); errata disposizione dei rilasci di estremità (b); corretta disposizione dei rilasci di estremità (c) (verde = montanti; magenta = diagonali; ciano = calastrelli).
La base dell’antenna e gli ancoraggi al suolo degli stralli sono stati modellati con vincoli a cerniera sferica: sono impedite le tre traslazioni nello spazio e sono consentite le tre rotazioni attorno agli assi coordinati (fig. 11).
Il modello tridimensionale completo dell’antenna è costituito da: - 1675 elementi frame;
- 878 nodi;
Figura 11 - Modello tridimensionale agli elementi finiti.
6.3.2 Modellazione dello strallo
Tutti gli stralli sono stati modellati con elementi cable aventi le proprietà descritte nel par. 6.2.2 e sezione circolare del diametro di 50 mm. Sono stati creati cinque tipi di materiali, uno per ogni ordine di stalli, differenti fra loro solo per il legame costitutivo tensione - deformazione.
L’utilizzo dei cable implica necessariamente lo svolgimento dell’analisi non lineare (vedi Cap. 4, par. 4.6).
In una prima fase, per ottenere risultati velocemente, si è impostata una mesh poco fitta per il singolo elemento cable: ciò non era tollerabile nello svolgimento dell’analisi modale poiché il programma andava a considerare anche i modi di vibrare fra un punto della mesh e il successivo.
Un buon compromesso fra convergenza dei risultati e velocità dell’analisi è stato ottenuto suddividendo lo strallo in segmenti successivi di lunghezza 2 m:
mesh più fitte non influenzano il risultato finale ma rallentano di molto l’analisi e viceversa.
Il vincolo alla base a alla sommità dello strallo è una cerniera sferica, automaticamente impostata dal codice di calcolo per l’incapacità dell’elemento cable di resistere a flessione.
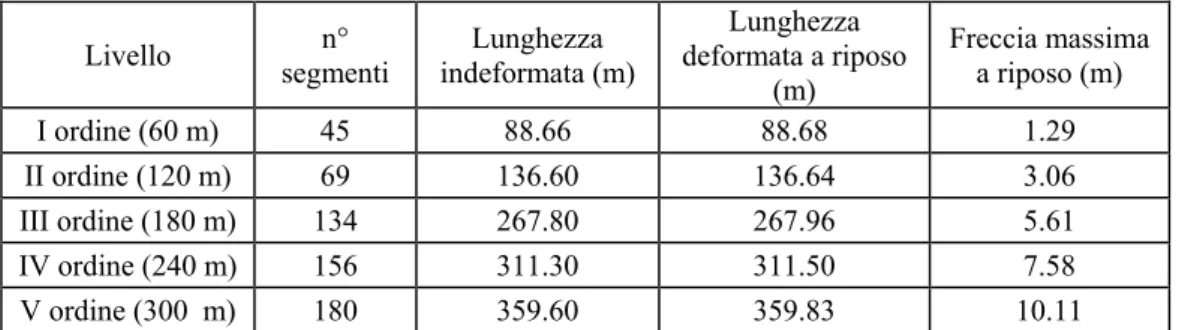
Nella tabella seguente si riassumono le caratteristiche principali del sistema di stralli:
Livello segmenti n° indeformata (m) Lunghezza deformata a riposo Lunghezza
(m) Freccia massima a riposo (m) I ordine (60 m) 45 88.66 88.68 1.29 II ordine (120 m) 69 136.60 136.64 3.06 III ordine (180 m) 134 267.80 267.96 5.61 IV ordine (240 m) 156 311.30 311.50 7.58 V ordine (300 m) 180 359.60 359.83 10.11
Tabella 1 – Caratteristiche del sistema di stralli per il modello dettagliato.
6.4 Il modello a “colonna equivalente”
Oltre che sul modello completo, descritto nel precedente paragrafo 6.3, si è svolta l’analisi su un modello semplificato, di facile immissione su codice di calcolo e che richiede minor tempo per l’analisi.
Applicheremo qui tutte le relazioni trovate e discusse nel Cap. V e faremo un confronto fra i risultati ottenuti per i due modelli.
6.4.1 Le caratteristiche della “colonna equivalente”
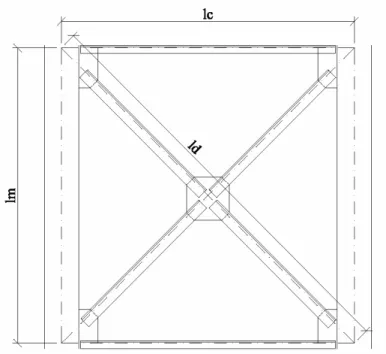
In primo luogo richiamiamo i dati che ci servono per impostare l’equivalenza energetica e ricavare lo spessore della piastra equivalente (fig. 12).
Figura 12 - Cella elementare del traliccio.
Luce del calastrello: lc = 300 cm Luce del diagonale: ld = 424.2 cm Luce del montante: lm = 300 cm Sezione del diagonale: Ad = 45.4 cm2 Sezione del montante: Am = 168 cm2 Diametro esterno del montante: de = 35 cm Diametro interno del montante: di = 31.8 cm
Moduli di elasticità dell’acciaio: E = 2100000 daN/cm2
G = 807690 daN/cm2
Lo spessore della piastra equivalente vale (vedi espressione 4, Cap. V):
t eq l c l mG⋅ 1 l d3 2 E⋅ A d⋅ l m3 6 E⋅ A m⋅ + ⋅ := teq = 0.27 cm
Figura 13 - Sezione della “colonna equivalente” al traliccio. Si ricavano adesso tutte le proprietà di questa sezione. Larghezza della singola piastra: lp = 265 cm
Sezione della singola piastra: Ap = lp teq = 71.49 cm2
Area della colonna equivalente: Aeq = 3 (Ap + Am) = 718 cm2
Momento di inerzia rispetto all’asse X:
- il momento di inerzia della piastra 1 (fig. 13) rispetto all’asse X vale: momento di inerzia baricentrico: Jx1b = 0.43 cm4
distanza baricentro piastra 1 - asse X: dx1 = 87 cm Jx1 = Jx1b + Ap dx12 = 541100 cm4
Come si vede il momento di inerzia baricentrico della piastra 1 è trascurabile. - Il momento di inerzia della piastra 2 (fig. 13) rispetto all’asse X vale: momento di inerzia baricentrico: Jx2b = 313750 cm4
distanza baricentro piastra 2 - asse X: dx2 = 43 cm Jx2 = Jx2b + Ap dx22 = 445930 cm4
- Il momento di inerzia del montante a (o b) rispetto all’asse X vale: momento di inerzia baricentrico: Jm = 23465 cm4
distanza baricentro montante a – asse X: dxa = 87 cm Jxa = Jm + Am dxa2 = 1295060 cm4
e, allo stesso modo per il montante b: Jxb = Jm + Am dxa2 = 1295060 cm4
- Il momento di inerzia del montante c rispetto all’asse X vale: momento di inerzia baricentrico: Jm = 23465 cm4
distanza baricentro montante c – asse X: dxc = 173 cm Jxc = Jm + Am dxc2 = 5051540 cm4
In definitiva, il momento di inerzia rispetto all’asse X della colonna equivalente è:
Jx = Jx1 + Jx2 + Jx3 + Jxa + Jxb + Jxc = 9074600 cm4
Momento di inerzia rispetto all’asse Y:
- il momento di inerzia della piastra 1 (fig. 13) rispetto all’asse Y vale: momento di inerzia baricentrico: Jy1b = 418336 cm4
distanza baricentro piastra 1 - asse Y: dy1 = 0 cm Jy1 = Jy1b = 418340 cm4
- Il momento di inerzia della piastra 2 (fig. 13) rispetto all’asse Y vale: momento di inerzia baricentrico: Jy2b = 104584 cm4
distanza baricentro piastra 2 - asse Y: dy2 = 75 cm Jy2 = Jy2b + Ap dy22 = 506690 cm4
Questo valore è lo stesso che si ottiene per la piastra 3, simmetrica rispetto all’asse Y:
Jy3 = Jy3b + Ap dy32 = 506690 cm4
- Il momento di inerzia del montante a (o b) rispetto all’asse Y vale: momento di inerzia baricentrico: Jm = 23465 cm4
distanza baricentro montante a – asse Y: dya = 150 cm Jya = Jm + Am dya2 = 3803470 cm4
Jyb = Jm + Am dxb2 = 3803470 cm4
- Il momento di inerzia del montante c rispetto all’asse Y vale: momento di inerzia baricentrico: Jm = 23465 cm4
distanza baricentro montante c – asse Y: dyc = 0 cm Jyc = Jm = 23470 cm4
In definitiva, il momento di inerzia rispetto all’asse Y della colonna equivalente è:
Jy = Jy1 + Jy2 + Jy3 + Jya + Jyb + Jyc = 9062100 cm4
Dai valori ottenuti si vede che il contributo dei montanti all’inerzia della sezione è all’incirca del 70 % mentre il restante 30% è dovuto alle piastre equivalenti. Dunque, nelle prime fasi della progettazione si può adottare il modello a colonna equivalente considerando solo il contributo dei montanti.
Momento di inerzia polare della colonna equivalente:
trascurando la presenza dei montanti negli spigoli della sezione (fig. 13), questa diventa tubolare di spessore teq; il momento di inerzia polare vale:
Joeq = (lc2 Ap) / 4 = 1608400 cm4
Area di taglio equivalente:
anche per ottenere questa caratteristica è lecito trascurare la presenza dei montanti ai vertici della sezione (vedi par. 5.3.4, Cap. V):
Ateq = 10 (3 Ap) / 9 √3 = 138 cm2
6.4.2 L’ impostazione del modello
In questo caso, anziché avere un traliccio reticolare che si sviluppa in elevato, il modello della struttura è costituito da un elemento frame verticale la cui sezione è stata creata manualmente, impostando i risultati trovati nel paragrafo precedente.
Figura 14 - Modello agli elementi finiti (colonna equivalente).
la mesh ogni metro lineare.
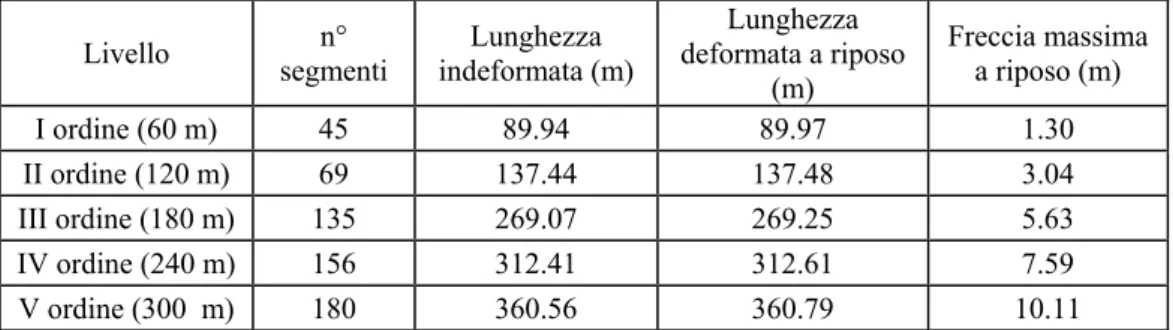
Per ciò che riguarda gli stralli vale quanto visto nel paragrafo 6.1.4; l’unica differenza sta nello sviluppo: ogni elemento cable è leggermente più lungo, rispetto al corrispondente nel modello dettagliato, poiché in questo caso l’asta è un elemento lineare non tridimensionale. Si riassumono i dati di impostazione dei cables nella seguente tabella:
Livello segmenti n° indeformata (m) Lunghezza deformata a riposo Lunghezza
(m) Freccia massima a riposo (m) I ordine (60 m) 45 89.94 89.97 1.30 II ordine (120 m) 69 137.44 137.48 3.04 III ordine (180 m) 135 269.07 269.25 5.63 IV ordine (240 m) 156 312.41 312.61 7.59 V ordine (300 m) 180 360.56 360.79 10.11
Affinchè il modello converga verso la soluzione, è indispensabile impedire la rotazione intorno all’asse Z (fig. 14), oltre che le traslazioni, nel nodo alla base dell’asta: il sistema sarebbe altrimenti labile nei confronti della torsione.
Il modello tridimensionale a colonna equivalente dell’antenna strallata è costituito da:
- 102 elementi frame, sarebbero 6 frames suddivisi a tratti di 3 m (contro i 1675 del modello dettagliato);
- 109 nodi (contro gli 878 del modello dettagliato); - 15 elementi cable.
Bastano pochi minuti per creare questo modello; l’analisi non lineare, sia sotto azioni statiche che dinamiche, richiede un tempo di gran lunga inferiore a quello necessario per risolvere il modello dettagliato. Vedremo dal confronto dei risultati che il suo utilizzo è possibile anche nella fase avanzata della progettazione.
6.5 Le azioni considerate nell’analisi
Nello svolgere l’esempio applicativo si sono prese in considerazione le seguenti azioni, ognuna con il proprio modello.
6.5.1 Il peso proprio e il peso delle antenne trasmittenti
Come è stato specificato nel par. 6.2, si è assunto per il peso specifico e per la densità dell’acciaio i seguenti valori:
γs = 78.5 kN/m3; ρs = 7850 kg/m3.
Essi sono stati impostati nei rispettivi campi di definizione dei materiali forniti dal programma SAP 2000.
La massa, invece, viene concentrata nei nodi di inizio, fine ed intermedi di ogni elemento.
Come si vedrà nel seguito, per determinare la configurazione a riposo dell’intera struttura verrà eseguita un’analisi di tipo non lineare sotto il solo peso proprio.
In vetta alla struttura si è fatto conto di montare un’antenna UHF di altezza 13.65 m pesante 490 kN: questo carico è stato distribuito sui tre montanti nel caso del modello dettagliato e concentrato nel nodo di sommità nel modello a colonna equivalente (fig. 15).
(a) (b) Figura 15 - Peso dell'antenna strasmittente: modello dettagliato (a); modello a colonna equivalente (b).
6.5.2 La pre-tensione degli stralli
Affinchè tutti gli stralli collaborino all’equilibrio della struttura, devono essere opportunamente pretesi. Se uno strallo viene scaricato fino ad avere tensione prossima a zero, proprio per la funzione per cui è concepito si disattiva: non è altro che una fune flessibile che non oppone alcun tipo di resistenza.
Da qui l’importanza del valore della pretensione: un valore troppo basso potrebbe essere annullato, per esempio dall’azione del vento, per gli stralli
nella zona sottovento. Contrariamente, un valore elevato potrebbe portare al superamento della resistenza negli stralli che si trovano sopravento.
Il comportamento dello strallo è il fattore che determina principalmente la deformabilità della struttura: è variando la pretensione che si limitano gli spostamenti e le rotazioni (globali e relative) lungo lo sviluppo dell’antenna. Si è constatato che quanto più uno strallo è teso tanto più gli effetti legati alla non linearità geometrica diminuiscono.
Nella prima fase del dimensionamento (analisi statica non lineare svolta “a mano”) si sono ottenuti valori della pretensione così variabili:
- I ordine P1 = 150 kN (18 % dello sforzo massimo); - II ordine P2 = 160 kN (12 % dello sforzo massimo); - III ordine P3 = 196 kN (12% dello sforzo massimo); - IV ordine P4 = 216 kN (16 % dello sforzo massimo); - V ordine P5 = 142 kN (12 % dello sforzo massimo).
Ovviamente questi valori sono risultati troppo bassi e, svolta l’analisi con SAP 2000, sono stati aumentati iterativamente finchè non si sono ottenuti valori accettabili delle deformazioni (lo spostamento in sommità è passato da 3.84 m a 0.96 m). Si vede comunque che, contrariamente a quanto si potrebbe pensare, l’andamento della pretensione non è costante o crescente con l’altezza: parte con un valore abbastanza elevato per gli stralli inferiori; aumenta leggermente (in percentuale è minore) per gli stralli centrali; diminuisce per gli stralli superiori.
In pratica è come se gli stralli inferiori vogliano governare la rigidezza (e la deformabilità) del tratto di base dell’antenna; quelli intermedi forniscano un contributo alla deformabilità paragonabile a quello del traliccio reticolare; quelli superiori lascino preponderare il contributo del traliccio. Durante le analisi effettuate si è comunque provato a dare alla pretensione andamento crescente con l’altezza. Ebbene, la deformabilità globale aumentava, soprattutto alla sommità: aumentavano troppo gli sforzi di compressione
Come si specificherà in seguito, l’effetto della pretensione è messo in risalto quando si svolge l’analisi dinamica; i valori definitivi sono stati calibrati proprio in questa fase.
Alla fine si sono ottenuti i seguenti valori medi (lungo lo sviluppo dello strallo vanno crescendo dalla base alla sommità) per la pretensione:
- I ordine P1 = 750 kN (60 % dello sforzo massimo); - II ordine P2 = 800 kN (55 % dello sforzo massimo); - III ordine P3 = 985 kN (58 % dello sforzo massimo); - IV ordine P4 = 1054 kN (58 % dello sforzo massimo); - V ordine P5 = 789 kN (60% dello sforzo massimo).
Questi valori sono stati impostati nel modello tramite una variazione termica negativa, applicata allo strallo nella configurazione deformata sotto peso proprio in modo non lineare (par. 6.6.1, 6.6.3):
- I ordine ∆T1 = -200 °C; - II ordine ∆T 2 = -230 °C; - III ordine ∆T 3 = -240 °C; - IV ordine ∆T 4 = -260 °C; - V ordine ∆T 5 = -200 °C
I valori ∆Ti sono un po’ maggiori rispetto a quelli che si otterrebbero operando la conversione delle pretensioni con la formula:
∆T i P i
E st A st⋅ ⋅1.2⋅10−5
poiché essa è valida in ambito lineare mentre nel modello sono stati applicati considerando la non linearità geometrica.
Le pretensioni elencate sono state applicate sia al modello dettagliato che alla colonna equivalente.
6.5.3 L’azione del vento: il modello statico
Per compiere l’analisi statica non lineare si è considerato, come modello dell’azione del vento, quello crescente con l’altezza in modo logaritmico, fornito da qualsiasi codice normativo (quello utilizzato si trova sul D.M. 14 Gennaio 2008).
Si è ipotizzato che la struttura sorga nella Zona 3 (Toscana) ad una quota sul livello del mare di 15 m (as):
Zona vref,o (m/s) Ao (m) ks (1/s)
3 27 500 0.020
La velocità di riferimento al suolo risulta: vref = vref,o = 27 m/s
La classe di rugosità del terreno sia la D (zone pianeggianti prive di ostacoli); la distanza dalla costa sia 10 km. Si ottiene la categoria di esposizione II:
Cat. di esposizione kr zo (m) zmin (m)
II 0.19 0.05 4
Si assume il coefficiente di topografia unitario;
l’andamento della velocità media del vento con la quota z è:
v M z( ) k r c t⋅ ln z z 0 ⋅ ⋅v ref (1)
Il coefficiente di esposizione per le velocità, anch’esso variabile con z, è:
c ev z( ) k r c t ln z z 0 ⋅ 7 c t ln z z min ⋅ + ⋅ ⋅
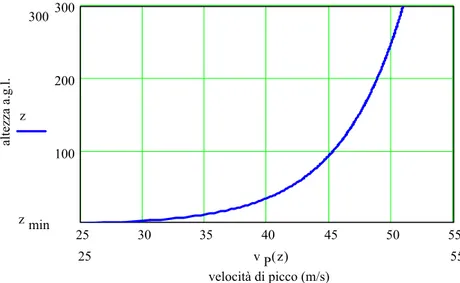
La velocità di picco del vento (fig. 16) si ottiene con:
vP z( ) cev z( ) Vref⋅
25 30 35 40 45 50 55 100 200 300 velocità di picco (m/s) altezza a.g.l. 300 z min z 55 25 v P z( )
Figura 16 - Andamento della velocità di picco del vento con l'altezza.
Il coefficiente di esposizione per il calcolo della pressione del vento è, per z < zmin:
c e z( )
(
c ev z( ))
2
La densità dell’aria ρ sia ritenuta costante e pari a 1.25 kg/m3; la pressione cinetica di picco (fig. 17) si ricava da:
q z( ) 1
2⋅ c e zρ⋅ ( )v ref 2 ⋅
Per z < zmin la pressione di picco del vento è assunta costante e vale 505 daN/m2.
400 600 800 1000 1200 1400 1600
100 200 300
pressione cinetica di picco (daN/mq)
altezza a.g.l. 300 z min z 1700 400 q z( )
Non si vuole tener conto di alcuna amplificazione dinamica quindi si pone il relativo coefficiente cd pari ad 1;
il coefficiente di pressione netta cp è stato assunto pari a 0.8.
L’andamento della pressione del vento w con l’altezza z è data da (fig. 18):
w z( ) c p c d⋅ ⋅q z( )
Per z < zmin la pressione del vento è assunta costante e vale 404 daN/m2.
400 600 800 1000 1200 1400
100 200 300
pressione esterna (daN/mq)
altezza a.g.l. 300 z min z 1400 300 w z( )
Figura 18 - Variazione della pressione del vento con l'altezza.
L’azione del vento è stata applicata alla struttura con una serie di forze nei nodi dove convergono diagonali, calstrelli e montante, al livello di ogni calastrello. Per massimizzare lo sforzo negli stralli sopravento, la direzione di applicazione delle forze coincide con quella dell’asse X in figura 19, cioè a 90° rispetto ad uno strallo (vedi Cap. III, par. 3.2).
La superficie esposta al vento è stata calcolata tenendo conto dell’effettivo ingombro delle aste (diagonali, calastrelli e montanti): ne risulta una larghezza di 1.1 m (anziché 3 m, cioè il lato della sezione trasversale).
La superficie di competenza di un certo livello ha quindi dimensioni: L = 1.1 m
(a) (b) Figura 19 – Azione del vento nei nodi nel modello dettagliato (a) e nel modello a colonna equivalente (b) a quota 84 m.
Come si vede in fig. 19a, per il modello dettagliato questa azione è stata divisa nei due nodi esposti direttamente al flusso del vento. Nel modello a colonna equivalente si è invece concentrata la forza nel solo nodo corrispondente sull’asse dell’asta (fig. 19b).
Vale la pena ricordare che modellare staticamente l’azione del vento è utile per eseguire il predimensionamento dell’antenna strallata con semplici calcoli “a mano”, affinare il dimensionamento con il programma di calcolo e soddisfare le verifiche di resistenza e deformabilità. Il comportamento effettivo della struttura deve essere ricercato applicandovi il vento non in maniera statica ma utilizzando una storia temporale variabile. Solo per antenne strallate di altezza inferiore ai 150/200 m è lecito utilizzare il modello statico, opportunamente amplificato con il coefficiente dinamico, avendo cura di limitare le deformazioni rendendo la struttura più rigida possibile.
6.5.4 L’azione del vento: modello delle fluttuazioni di velocità
Quando si vuole applicare alla struttura una storia temporale del vento si possono seguire due strade:
1) si ricercano, sul territorio, le stazioni meteorologiche nella zona di interesse le quali forniscono i dati di ventosità; mediante elaborazione statistica (di
solito si utilizza il modello di Gumbel) si ricerca una storia temporale che abbia un determinato tempo di ritorno (in genere 50 anni);
2) in mancanza di registrazioni sul territorio, si genera, con modelli numerici, la storia della velocità del vento.
In questo lavoro si è fatto uso della seconda via poiché ci interessa principalmente cogliere la differenza del comportamento dell’antenna strallata sottoposta ad azione statica o dinamica.
Nel caso di vera e propria progettazione, sarà utile reperire i dati di ventosità nella zona dove sorgerà la costruzione poiché il vento è influenzato, tra l’altro, sia da variazioni stagionali che dall’orografia del terreno circostante. Un modello numerico non può tener conto di questi fattori è può portare o ad un sovradimensionamento della struttura o, ancor peggio, ad una sottostima degli effetti del vento.
Per determinare la fluttuazione della velocità del vento nel tempo, occorre dapprima scegliere lo spettro delle velocità.
Per il nostro scopo si è utilizzato il modello di Davenport:
S v f() 4 k v M z( ) 2 ⋅ f ⋅ 1200 f⋅ v M z( ) 2 1 1200 f⋅ v M z( ) 2 + 4 3 ⋅ (2) in cui:
vM(z) è la velocità media del vento alla quota considerata (formula 1); k è l’altezza di rugosità del sito (k = zo);
f è la frequenza del fenomeno.
L’intervallo di frequenza considerato per tutte le time histories va da: fin = 10-5 Hz
fino a f = 2 Hz
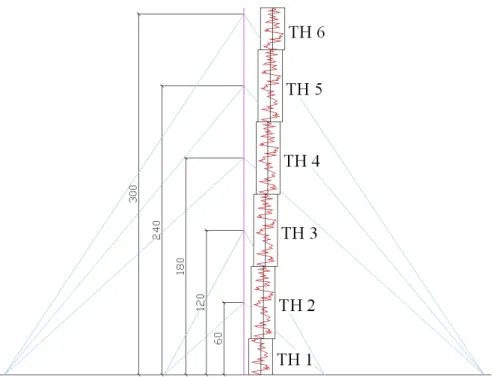
Sono state create sei storie del vento per le velocità medie a quota 10 m, 60 m, 120 m, 180 m, 240 m, 300 m per simulare la variabilità dell’azione del vento con l’altezza (fig. 20).
Figura 20 – Disposizione delle time histories lungo lo sviluppo dell’antenna strallata.
Una volta ottenuto lo spettro della velocità si ricava la time history corrispondente con il seguente algoritmo:
- si divide l’intervallo di frequenza considerato in tanti intervalli ∆f; il numero di intervalli in cui è stato diviso lo spettro è:
L f fin f in− ∆f
- si calcola il valore della frequenza nel punto centrale di ogni intervallo:
f i( ) f in ∆f 2 + +i⋅∆f (i = 0, 1, 2.., L) - si sceglie la durata della time history;
- la fluttuazione della velocità del vento si ottiene da: v t( ) 0 L i 2 S v f i()⋅ ( )⋅∆f
(
)
1 2 cos 2(
⋅ f iπ⋅ ( )⋅t+ ψi)
⋅∑
= (3)Con il criterio esposto si sono determinati gli spettri e le time histories seguenti.
Time history 1.
Dati di imput per determinare lo spettro (equazione 2): vM(10) = 27 m/s k = 0.05 m f = 10-5, …,2 Hz 0.2 0.4 0.6 0.8 1 500 1000 1500 2000 2500 3000 frequenza
spettro della fluttuazione di velocità
3000
20 S v f()
1
0.00001 f
Figura 21 – Spettro della velocità per la prima time history.
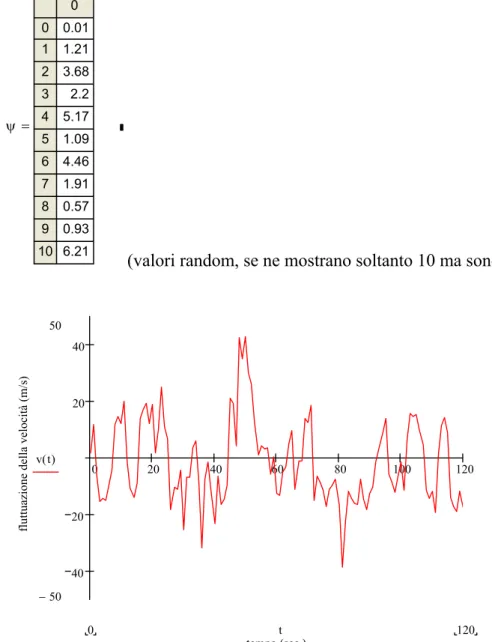
Dati di imput per determinare la fluttuzione della velocità (equazione 3): ∆f = 10-2 Hz
L = 200
ψ 0 0 1 2 3 4 5 6 7 8 9 10 0.01 1.21 3.68 2.2 5.17 1.09 4.46 1.91 0.57 0.93 6.21 =
(valori random, se ne mostrano soltanto 10 ma sono 200)
0 20 40 60 80 100 120 40 20 20 40 tempo (sec.)
fluttuazione della velocità (m/s)
50 50 − v t( ) 120 0 t
Figura 22 – Prima time history generata. Time history 2.
Dati di imput per determinare lo spettro (equazione 2): vM(60) = 36 m/s
k = 0.05 m f = 10-5, …,2 Hz
0.2 0.4 0.6 0.8 1 1000 2000 3000 4000 frequenza
spettro della fluttuazione di velocità
4000
20 S v f()
1
0.00001 f
Figura 23 – Spettro della velocità per la seconda time history.
I valori di ∆f, L e t sono sempre gli stessi, ciò che cambia sono i valori casuali ψ (non si riportano per brevità di esposizione).
0 20 40 60 80 100 120
50 50
tempo (sec.)
fluttuazione della velocità (m/s)
60 60 − v t( ) 120 0 t
Figura 24 – Seconda time history generata. Time history 3:
k = 0.05 m f = 10-5, …,2 Hz 0.2 0.4 0.6 0.8 1 1000 2000 3000 4000 5000 frequenza sp
ettro della fluttuazione di velocità
5000
20 S v f()
1
0.00001 f
Figura 25 – Spettro della velocità per la terza time history.
I valori di ∆f, L e t sono sempre gli stessi, ciò che cambia sono i valori casuali ψ (non si riportano per brevità di esposizione).
0 20 40 60 80 100 120
50 50
tempo (sec.)
fluttuazione della velocità (m/s)
60 60 − v t( ) 120 0 t
Time history 4:
Dati di imput per determinare lo spettro (equazione 2): vM(180) = 42 m/s k = 0.05 m f = 10-5, …,2 Hz 0.2 0.4 0.6 0.8 1 1000 2000 3000 4000 5000 frequenza sp
ettro della fluttuazione di velocità
5000
20 S v f()
1
0.00001 f
Figura 27 – Spettro della velocità per la quarta time history.
0 20 40 60 80 100 120
50 50
fluttuazione della velocità (m/s)
70
70 − v t( )
Time history 5.
Dati di imput per determinare lo spettro (equazione 2): vM(240) = 43 m/s k = 0.05 m f = 10-5, …,2 Hz 0.2 0.4 0.6 0.8 1 1000 2000 3000 4000 5000 frequenza sp
ettro della fluttuazione di velocità
5000
20 S v f()
1
0.00001 f
Figura 29 – Spettro della velocità per la quinta time history.
0 20 40 60 80 100 120
50 50
tempo (sec.)
fluttuazione della velocità (m/s)
60 60 − v t( ) 120 0 t
Time history 6:
Dati di imput per determinare lo spettro (equazione 2): vM(300) = 45 m/s k = 0.05 m f = 10-5, …,2 Hz 0.2 0.4 0.6 0.8 1 1000 2000 3000 4000 5000 frequenza
spettro della fluttuazione di velocità
5000
20 S v f()
1
0.0005 f
Figura 31 – Spettro della velocità per la sesta time history.
0 20 40 60 80 100 120
50 50
fluttuazione della velocità (m/s)
60
60 − v t( )
Tutte le time history si riferiscono alla corrispondente velocità media con la quale è stato generato lo spettro di Davenport; pertanto i valori delle ordinate vanno normalizzati dividendoli appunto per la velocità media.
Le fluttuazioni della velocità del vento si riperquotono sui valori della pressione esercitata sulla struttura e quindi sulle azioni direttamente applicate. Abbiamo visto nel paragrafo precedente che la pressione statica del vento si è riportata nei nodi della struttura come carico concentrato.
La stessa cosa è stata fatta in questo caso, avendo cura di calcolare le pressioni riferendosi alla velocità media (variabile con z) anziché alla velocità di picco. Successivamente sono state immesse nel programma le sei time history, ognuna delle quali è stata allegata come funzione di variazione dei carichi concentrati sull’altezza corrispondente (fig. 20).
Le time history sono state immesse per punti, considerando i valori ogni 0.1 secondi.
Affinchè non si avessero problemi di mancata convergenza durante l’analisi, si sono apportate le seguenti modifiche alle time histories:
- per t = 0 il valore della funzione è stato posto uguale a 0 (in pratica tutte le time histories cominciano dall’origine degli assi);
- sono stati eliminati eventuali tratti orizzontali, o comunque a bassa pendenza, presenti nei grafici.
Le storie temporali della velocità del vento sono state fatte agire sia sul modello dettagliato che sul modello a colonna equivalente allo stesso modo.
6.6 I risultati dell’analisi: confronto fra i due modelli
Nei punti che seguono si descrive come sono state impostate le analisi condotte con il programma di calcolo SAP 2000® v. 11.0.4. Vengono poi messi a confronto i risultati ottenuti per i due modelli.
6.6.1 L’analisi statica non lineare
Dopo aver creato i modelli dell’antenna strallata con le caratteristiche descritte nei paragrafi 6.3 e 6.4, si è performato l’analisi statica non lineare sotto l’azione del vento. Il fine principale è stato quello di avere una “conferma” sul predimensionamento ottenuto applicando il metodo “a mano” illustrato nel Cap. III, par. 3.2. Inoltre è stato possibile valutare la deformabilità della struttura, controllare che gli stralli sottovento rimanessero tesi, eseguire la verifica degli elementi più sollecitati.
Poiché nell’analisi non lineare il risultato finale è influenzato dall’ordine di applicazione dei carichi si è convenuto di creare i seguenti casi di analisi:
1. DEAD: sulla struttura si lascia agire il solo peso proprio determinando la configurazione deformata fondamentale e la relativa matrice di rigidezza;
2. PRETENSIONE: sulla configurazione ottenuta al termine del caso DEAD si fa agire la sola pretensione negli stralli secondo quanto detto al par. 6.5.2; si ottiene una nuova matrice di rigidezza della struttura e la corrispondente deformata;
3. PANTENNA: al termine del caso precedente si fa agire sulla struttura il peso dell’antenna trasmittente secondo quanto detto al par. 6.5.1; ancora viene aggiornata la matrice di rigidezza che sarà utilizzata nel caso di analisi successivo;
4. VENTO: si fa agire il modello statico dell’azione del vento (par. 6.5.3); al termine si ottiene la configurazione finale della struttura.
Come si vede ogni caso di analisi dipende da quello che immediatamente lo precede secondo la gerarchia principale-dipendente (fig. 33).
Ricordiamo che, per gli elementi cable, il programma considera automaticamente la non linearità di tipo P-delta con grandi spostamenti (vedi Cap. 4, par. 4.6). La scelta dunque è dettata dalla tipologia del resto della struttura. La presenza di aste della lunghezza massima di 3 m e soggette a
Figura 33 – Gerarchia fra i casi di analisi.
In una prima fase è stato utile eseguire l’analisi non lineare senza considerare alcun tipo di effetto, in modo da avere risultati velocemente e controllare che non ci fossero vistosi errori di impostazione nel modello.
Per ottenere una convergenza veloce si è impostato il valore massimo delle iterazioni in uno stesso step di carico a 100 per il metodo di Newton-Raphson modificato e a 200 per il metodo di Newton-Raphson (vedi in proposito il Cap.IV, par. 4.6)
Le impostazioni ora descritte sono state selezionate in entrambi i modelli (completo e colonna equivalente).
Nella tabella 3 si riportano i risultati per lo spostamento e la rotazione, al livello degli stralli e in sommità, al termine dell’analisi.
Il valore della rotazione per il modello completo è stato ottenutto facendo la media delle rotazioni nei 6 nodi che giacciono sulla sezione trasversale dell’antenna (fig. 5).
Per ciò che riguarda gli spostamenti si vede che i due modelli forniscono risultati quasi coincidenti con differenza massima del 4.5 % (dell’ordine del centimetro).
Modello completo Colonna equivalente Analisi statica
non lineare spostamento rotazione spostamento rotazione al 1° livello
(quota: 60 m) 0.213 m 0.00482 rad 0.210 m 0.00506 rad al 2° livello
(quota: 120 m) 0.589 m 0.00475 rad 0.578 m 0.00521 rad al 3° livello
(quota: 180 m) 0.813 m 0.00414 rad 0.805 m 0.00432 rad al 4° livello
(quota: 240 m) 1.101 m 0.00273 rad 1.084 m 0.00317 rad al 5° livello
(quota: 300 m) 0.995 m 0.00823 rad 1.027 m 0.00592 rad in sommità
(quota: 305 m) 0.955 m 0.00809 rad 0.998 m 0.00590 rad Tabella 3 – Risultati dell’analisi statica non lineare per i due modelli a confronto.
Le rotazioni differiscono sensibilmente, 28 % di scarto massimo, soprattutto per i due livelli più in alto: ciò è imputabile al fatto che nel modello completo l’antenna si deforma ruotando anche attorno all’asse verticale, movimento impedito, per ragioni di labilità, nel modello a colonna equivalente.
(a) (b)
Figura 34 – Configurazione deformata al termine dell’analisi statica non lineare: modello dettagliato (a), modello a colonna equivalente (b).
Modello completo Colonna equivalente Analisi statica
non lineare Freccia max (sottovento) Freccia min (sopravento) Freccia max (sottovento) Freccia min (sopravento) I ordine (60 m) 0.595 m 0.048 m 0.482 m 0.058 m II ordine (120 m) 1.054 m 0.092 m 0.843 m 0.116 m III ordine (180 m) 3.055 m 0.587 m 2.847 m 0.601 m IV ordine (240 m) 3.130 m 0.658 m 2.897 m 0.679 m V ordine (300 m) 3.641 m 1.092 m 3.727 m 1.061 m
Tabella 4 – Freccia massima e minima per gli stralli nei due modelli.
Modello completo Colonna equivalente Analisi statica
non lineare N max (sopravento) N min (sottovento) N max (sopravento) N min (sottovento) I ordine (60 m) 1355 kN 182 kN 1376 kN 244 kN II ordine (120 m) 1502 kN 155 kN 1546 kN 218 kN III ordine (180 m) 1728 kN 347 kN 1749 kN 377 kN IV ordine (240 m) 1804 kN 395 kN 1829 kN 432 kN V ordine (300 m) 1282 kN 342 kN 1347 kN 394 kN
Tabella 5 – Sforzo massimo e minimo negli stralli.
Infine si confrontano le reazioni alla base dell’antenna:
Reazioni alla base Analisi statica
non lineare Modello completo Colonna equivalente
N 13224 kN 12849 kN
T 110 kN 103 kN
6.6.2 L’analisi dinamica non lineare alle oscillazioni libere (analisi modale)
Dopo aver calibrato il modello mediante l’analisi statica non lineare è stata svolta l’analisi dinamica, indispensadile per capire il reale funzionamento della struttura. Per prima cosa si è indagato il comportamanto alle oscillazioni libere. Questo tipo di analisi è definito in SAP 2000 con il termine “Modal”. Il programma discretizza la struttura concentrando le masse nei nodi e, tramite la risoluzione delle equazioni di moto agli autovalori, determina le frequenze proprie e le forme modali (vedi Cap. IV, par. 4.4.1, 4.7). Queste, insieme agli spettri di progetto, permettono di risolvere l’analisi sismica (anche se per le antenne strallate è meglio utilizzare gli accelerogrammi).
Le impostazioni relative a questo caso di analisi sono state le seguenti:
1) come configurazione fondamentale della struttura è stata scelta quella al termine del caso non lineare DEAD (vedi paragrafo precedente); il programma ricerca i modi di vibrare a partire dalla matrice di rigidezza corrispondente;
2) il numero massimo di modi da ricercare è stato fissato a 100;
3) la tolleranza di convergenza nel processo di risoluzione è stata fissata a 10-9.
E’ da notare che, in presenza di elementi cable, far iniziare l’analisi modale con le condizioni iniziali nulle (stato non stressato) non porta alla soluzione corretta: il programma fornisce un messaggio di avvertimento (Warning) per i risultati ottenuti. Infatti non è riuscito a trovare una configurazione di partenza univoca per i cables che richiedono almeno la soluzione del caso non lineare DEAD. Basta comunque controllare le deformate delle forme modali per rendersi conto che qualcosa non funziona: le forme sono vistosamente improponibili ed i periodi propri sono troppo elevati (105 e più).
Si riportano i risultati ottenuti nei due modelli per i primi 10 modi di vibrare nella tabella 7:
Modello completo Colonna equivalente Analisi dinamica: oscillazioni libere Periodo
(sec) Frequenza (Hz) Periodo (sec) Frequenza (Hz)
1° modo 6.0917 0.164 5.9791 0.167 2° modo 5.9241 0.169 5.8440 0.171 3° modo 5.5696 0.180 5.3990 0.185 4° modo 5.1283 0.195 5.0628 0.198 5° modo 5.1137 0.196 5.0463 0.198 6° modo 4.5523 0.220 4.4223 0.226 7° modo 4.3887 0.228 4.3437 0.230 8° modo 4.3086 0.232 4.1954 0.238 9° modo 3.5456 0.282 3.4079 0.293 10° modo 3.5338 0.283 3.4068 0.294
Tabella 7 – Risultati per l’analisi alle oscillazioni libere.
Dal confronto di questi risultati ci si rende conto che il modello a colonna equivalente risulta valido anche per l’analisi dinamica alle oscillazioni libere.
Figura 35 – Deformata relativa al primo modo di vibrare: sono coinvolti gli stralli superiori. modello dettagliato colonna equivalente
I modi elencati in tabella 2, coinvolgono principalmente le oscillazioni degli stralli superiori; l’equivalenza fra i due modelli vale anche per i periodi più bassi, quelli che coinvolgono l’oscillazione degli stralli inferiori oppure la vibrazione dell’asta verticale (vedi figure seguenti).
Figura 36 - Deformata relativa al quinto modo di vibrare: sono coinvolti gli stralli superiori.
Figura 37 - Deformata relativa al sesto modo di vibrare: sono coinvolti gli stralli superiori.
modello dettagliato colonna equivalente
Figura 38 - Deformata relativa al quindicesimo modo di vibrare: sono coinvolti gli stralli inferiori.
Figura 39 - Deformata relativa al 35° modo di vibrare: è coinvolta la deformata dell’asta (e quella degli stralli di conseguenza).
Come era da aspettarsi, i modi inferiori (lunghi periodi) sono quelli che coivolgono il sistema di stralli, meno rigidi rispetto all’asta verticale; questa è coinvolta nei modi superiori (brevi periodi).
C’è da sottolineare che l’analisi alle oscillazioni libere andrebbe fatta considerando la matrice di rigidezza della struttura una volta che è stata applicata anche la pretensione poiché è questa (peso proprio + pretensione)
modello dettagliato colonna equivalente
l’effettiva configurazione a riposo. Le considerazioni svolte si possono ripetere anche in questo caso con l’unica differenza che risiede nel comportamento più rigido dell’antenna strallata e quindi in valori leggermente inferiori per i periodi propri.
6.6.3 L’analisi dinamica non lineare sotto vibrazione forzata
Per cogliere il reale comportamento della struttura sotto l’azione del vento è indispensabile adottare, al posto di un modello statico equivalente, una storia di carico variabile nel tempo, che rappresenti in modo verosimile la fluttuazione della velocità del vento.
Nei due modelli (dettagliato e colonna equivalente) sono state inserite le time history ricavate nel par. 6.5.4.
L’ordine con cui sono state applicate le azioni è il seguente: 1) DEAD: caso di analisi statica non lineare sotto il peso proprio;
2) PRETENSIONE: caso di analisi statica non lineare che ha come condizione iniziale quella al termine del caso DEAD a cui si aggiunge la pretensione degli stralli;
3) PANTENNA: caso di analisi statica non lineare che ha come condizione iniziale quella al termine del caso precedente a cui si aggiunge il peso dell’antenna trasmittente;
4) VENTO-TH: caso di analisi dinamica non lineare che considera, come condizione iniziale, quella al termine del caso precedente in cui agisce l’azione del vento secondo la funzione time history immessa.
Il tipo di non linearità geometrica considerato per tutti i casi di analisi è il P-delta, fatta eccezione, al solito, per gli stralli (elementi cable) per i quali il programma SAP 2000 considera la non linearità P-delta con grandi spostamenti. Per ottenere una convergenza veloce si è impostato il valore massimo delle iterazioni in uno stesso step di carico a 200 per il metodo di
Figura 40 – Gerarchia fra i casi di analisi.
Come metodo di risoluzione delle equazioni di moto (vedi Cap. 4, par. 4.8) è stata selezionata l’integrazione diretta secondo il processo di Newmark.
In una prima fase, per ottenere risultati velocemente, si è impostato il time step per l’integrazione ad 1 secondo; successivamente si è diminuito fino ad 1/10 di secondo, valore per il quale la soluzione non era più influenzata da questo parametro.
I risultati relativi a spostamenti e rotazioni lungo lo sviluppo dell’antenna sono raggruppati di seguito (tabella 8).
Come era facile immaginare, i risultati sono diversi da quelli ottenuti con l’analisi statica non lineare; in particolare si nota una maggiore rigidezza del sistema di stralli più corti (fino al terzo ordine), che hanno spostamento in sommità minore, ed il comportamento inverso per gli stralli superiori che manifestano spostamenti maggiori degli ancoraggi. Comunque tali differenze raggiungono al massimo il 12 % a conferma che, con i valori della pretensione scelta, la struttura mostra elevata rigidezza anche quando sottoposta all’azione variabile nel tempo. Risulta chiaro perciò che l’analisi statica non lineare porta ad un corretto predimensionamento della struttura e deve essere svolta scrupolosamente, soprattutto per determinare la giusta pretensione negli stralli.
Modello completo Colonna equivalente Analisi
dinamica: vibrazioni
forzate spostamento rotazione spostamento rotazione al 1° livello
(quota: 60 m) 0.173 m 0.00464 rad 0.157 m 0.00423 rad al 2° livello
(quota: 120 m) 0.528 m 0.00489 rad 0.455 m 0.00452 rad al 3° livello
(quota: 180 m) 0.722 m 0.00684 rad 0.653 m 0.00706 rad al 4° livello
(quota: 240 m) 1.063 m 0.00732 rad 1.069 m 0.00558 rad al 5° livello
(quota: 300 m) 1.049 m 0.00830 rad 1.102 m 0.00640 rad in sommità
(quota: 305 m) 1.024 m 0.00818 rad 1.082 m 0.00638 rad Tabella 8 – Risultati dell’analisi dinamica non lineare sotto vibrazione forzata (inviluppo) messi a confronto per i due modelli.
L’andamento dello spostamento alla sommità dell’antenna, per i due modelli a confronto, è presentato nella fugira seguente:
Spostamento del nodo in sommità (quota 305 m)
-1500 -1000 -500 0 500 1000 1500 0 2 4 6 8 10 12 14 16 18 20 Tempo (sec.) Spostamento (mm)
Anche in questo caso il risultato dei due modelli è soddisfacente (tabella 8): la massima differenza fra gli spostamenti è del 14 % (un po’ superiore rispetto all’analisi statica). Al solito la rotazione è influenzata dal comportamento tridimensionale del traliccio, non presente nella singola asta del modello a colonna equivalente, quindi le differenze nelle rotazioni sono più marcate. La maggiore differenza dei risultati, rispetto all’analisi statica, risiede nel fatto che in ambito dinamico è coinvolta la massa della struttura: ovviamente la distribuzione della massa nei due modelli è sensibilmente diversa, visto che il programma SAP 2000 concentra questa proprietà nei nodi. Il modello dettagliato ne ha 878 distribuiti nello spazio mentre quello a colonna equivalente ne ha 109 che sono allineati sull’asse verticale dell’antenna (eccetto i 7 nodi di base).
Si riporta, nelle figure seguenti, lo spostamento dei punti di ancoraggio delle funi al traliccio per i cinque ordini di stralli.
Spostamento dell'ancoraggio a 60 m -200 -150 -100 -50 0 50 100 150 0 2 4 6 8 10 12 14 16 18 20 Tempo (sec.) Spostamento (mm)
Spostamento dell'ancoraggio a 120 m -500 -400 -300 -200 -100 0 100 200 300 400 500 0 2 4 6 8 10 12 14 16 18 20 Tempo (sec.) Spostamento (mm)
Modello dettagliato Colonna equivalente
Spostamento dell'ancoraggio a 180 m -800 -600 -400 -200 0 200 400 600 800 0 2 4 6 8 10 12 14 16 18 20 Tempo (sec.) Spostamento (mm)
Spostamento dell'ancoraggio a 240 m -1500 -1000 -500 0 500 1000 0 2 4 6 8 10 12 14 16 18 20 Tempo (sec.) Spostamento (mm)
Modello dettagliato Colonna equivalente
Spostamento dell'ancoraggio a 300 m -1500 -1000 -500 0 500 1000 0 2 4 6 8 10 12 14 16 18 20 Tempo (sec.) Spostamento (mm)
Negli stralli si hanno i seguenti sforzi:
Modello completo Colonna equivalente Analisi dinamica: vibrazioni forzate N max (inviluppo) N min (inviluppo) N max (inviluppo) N min (inviluppo) I ordine (60 m) 1211 285 kN 1227 kN 364 kN II ordine (120 m) 1439 190 kN 1400 kN 340 kN III ordine (180 m) 1658 348 kN 1624 kN 445 kN IV ordine (240 m) 1792 453 kN 1824 kN 450 kN V ordine (300 m) 1316 325 kN 1417 kN 329 kN
Tabella 9 – Inviluppo dello sforzo di trazione negli stralli durante la storia di carico.
Con l’analisi dinamica sotto vibrazione forzata ci si rende conto dell’effettivo comportamento del sistema di stralli: non vi è più una zona sopravento, dove sono più tesi, ed una sottovento, dove vengono parzialmente scaricati. Ogni strallo può trovarsi, in un certo istante, nell’una o nell’altra fase cosicchè tutti contribuiscono in ugual maniera all’equilibrio della struttura.
Risulta anche qui importante il valore da affidare alla pretensione affinchè nessuno di essi si scarichi completamente: si è visto che aumentandola gradualmente, il comportamento è risultato più rigido e tale da giustificare (almeno in parte) i procedimenti di calcolo semplificati che venivano adottati in passato (vedi Cap. III).
Un comportamento particolare degli stralli si nota confrontando i risultati della massima tensione ottenuti con l’analisi dinamica (tabella 9) e con l’analisi statica non lineare (tabella 5). Nonostante gli spostamenti dei punti di ancoraggio risultino superiori sotto la forzante del vento, le tensioni negli stralli sono inferiori rispetto al caso statico. Questo comportamento si spiega con il fatto che durante la vibrazione gli stralli cominciano ad oscillare e la forza di inerzia che si genera sulla loro massa, va in senso opposto all’azione del vento.
Si riportano gli andamenti dello sforzo di trazione negli stralli direttamente investiti dall’azione del vento per il I, III e V ordine (rispettivamente ancorati a 60, 120, 180 m).
Sforzo normale nello strallo del I ordine
0 200 400 600 800 1000 1200 1400 0 2 4 6 8 10 12 14 16 18 20 Tempo (sec.) N (kN)
Modello dettagliato Colonna equivalente
Sforzo normale nello strallo del III ordine
0 200 400 600 800 1000 1200 1400 1600 1800 0 2 4 6 8 10 12 14 16 18 20 T empo (sec.) N (kN)
Sforzo normale nello strallo del V ordine 0 200 400 600 800 1000 1200 1400 1600 0 2 4 6 8 10 12 14 16 18 20 T empo (sec.) N (kN)
Modello dettagliato Colonna equivalente
E’ interessante confrontare l’andamento della tensione in tutti gli stralli di una stessa fila: si vede che l’andamento globale è lo stesso mentre cambia la variazione locale. Inoltre, salendo dal I al IV ordine lo sforzo assiale aumenta (aumenta la pretensione) mentre per lo strallo del V ordine si ha sollecitazione minore (infatti è sottoposto ad una minore pretensione).
Andamento dello sforzo normale negli stralli
200 400 600 800 1000 1200 1400 1600 1800 0 2 4 6 8 10 12 14 16 18 20 T empo (sec.) N (kN)
I ordine II ordine III ordine IV ordine V ordine
Figura 42 – Sforzo normale negli stralli di una stessa fila (andamento ricavato dal modello dettagliato dell’antenna strallata).
Confrontiamo adesso le reazioni massime alla base dell’antenna:
Reazioni alla base (inviluppo) Analisi
dinamica: vibrazioni
forzate Modello completo Colonna equivalente
N 13287 kN 12922 kN
T 86 kN 83 kN
Tabella 10 - Reazioni alla base dell'antenna per i due modelli.
Taglio alla base
-100 -80 -60 -40 -20 0 20 40 60 80 100 0 2 4 6 8 10 12 14 16 18 20 Tempo (sec.) Taglio (kN)
Modello dettagliato Colonna equivalente
Figura 43 – Andamento del taglio alla base: non c’è sostanziale differenza fra i due modelli. Anche per esse i due modelli sono in accordo, con differenze più marcate per la reazione verticale dovute, come detto, alla diversa distribuzione delle masse nel modello (fig 43).
Sforzo normale alla base 12500 12600 12700 12800 12900 13000 13100 13200 13300 13400 0 2 4 6 8 10 12 14 16 18 20 Tempo (sec.) Sforzo normale (kN )
Modello dettagliato Colonna equivalente
Figura 44 – Andamento nel tempo della reazione verticale alla base: si nota una differenza costante dovuta alla diversa distribuzione delle masse nei due modelli.
Nonostante ci sia differenza nel valore dello sforzo normale alla base (vedi tabella 10), guardando la figura 43 ci si accorge che questa differenza rimane costante durante la vibrazione: ciò che ci preme sottolineare è che l’andamento è pressochè lo stesso per entrambi i modelli a conferma che il modello a colonna equivalente risponde correttamente all’azione esterna.
6.7 Osservzioni conclusive
Ricapitoliamo alcune considerazioni che sono emerse nei capitoli precedenti. In primo luogo si è constatato che l’analisi statica non lineare di un’antenna strallata alta più di 200 m (nell’esempio proposto l’altezza è 305 m) è utile solo al fine di un predimensionamento della struttura. Comunque si è visto che eseguire questo tipo di analisi scrupolosamente, facendo in modo di rispettare i limiti imposti alla deformabilità e alle sollecitazioni, conduce ad un ottimo e veloce dimensionamento. Una volta che la struttura è ben definita in questa
Si ricorda che per altezze inferiori ai 200 m molti codici normativi consentono l’analisi statica non lineare ma, allo stesso tempo, consigliano lo studio sotto oscillazioni forzate.
Nel Capitolo IV, al paragrafo 4.9, si è fornito un criterio specifico che porta dal concepimento all’analisi di un’antenna strallata; si ricapitolano i passi nel diagramma seguente:
L’analisi dinamica sotto oscillazione forzata è necessaria per individuare l’effettivo comportamento della struttura. Le azioni che vanno modellate con funzioni time history sono due: il vento (di fondamentale importanza) e il sisma.
Un’antenna strallata si trova costantemente immersa in un flusso d’aria e, data la sua snellezza, può interagire pericolosamente con esso. Grazie ai moderni programmi di calcolo (noi abbiamo usato il software SAP2000® v. 11.0.4) è possibile simulare la storia di carico, visualizzare la risposta nel tempo e
Svolgimento dell'analisi dinamica non lineare sotto oscillazione forzata: indagine del comportamento sotto l' azione variabile del vento; indagine del comportamento dato l'accelerogramma di un evento sismico;
verifiche definitive
Svolgimento dell'analisi dinamica non lineare alle vibrazioni libere per trovare le caratteristiche dinamiche proprie ed
eventualmente eseguire l'analisi sismica con spettro di progetto Creazione del modello agli elementi finiti della struttura: svolgimento dell'analisi statica non lineare con codice di calcolo per affinare il dimensionamento e verificare i limiti imposti alla deformabilità. Predimensionamento delle membrature mediante analisi statica non lineare:
schema dell'asta a trave continua su appoggi cedevoli elasticamente soggetta alla sola azione statica del vento.
raccogliere l’inviluppo degli effetti (deformazioni e caratteristiche della sollecitazione).
Svolgendo l’analisi dinamica sotto l’azione del vento si è visto un aumento degli spostamenti della struttura del 12 %: vi è dunque una certa amplificazione dinamica che non è valutata dall’analisi statica non lineare. Questa amplificazione è risultata contenuta, rispetto a ciò che ci si attendeva, ed ha giustificato il fatto che in passato veniva svolta solo l’analisi statica per queste strutture.
L’elemento che determina maggiormente la risposta della struttura è lo strallo: il suo comportamento non lineare viene mitigato se si sceglie un opportuno valore della pretensione. Nell’esempio svolto si è visto che il valore della pretensione deve aumentare dagli stralli inferiori verso quelli superiori ma con variazioni relative minori in percentuale (vedi par. 6.5.2). Questo affinchè gli stralli più lunghi non comprimano troppo il traliccio e facciano aumentare gli effetti del secondo ordine dovuti alla deformabilità di esso (non linearità P-delta).
Durante l’analisi dinamica sotto l’azione del vento si è constatato che tutti gli stralli contribuiscono in ugual misura ad incassare l’azione esterna trovandosi alternativamente sopravento (più tesi) e sottovento (meno tesi) poiché tutti oscillano. Nonostante le deformazioni siano superiori rispetto al caso statico, la tensione massima negli stralli è inferiore grazie all’intervento delle forze di inerzia che agiscono in controfase durante la vibrazione. L’analisi statica non lineare non può mettere in luce questo comportamento: gli stralli sopravento sono quelli che danno contributo maggiore. Risulta perciò ancora l’importanza del valore da affidare alla pretensione: bisogna fare in modo che durante l’oscillazione nessuno strallo riduca a zero la sua tensione, escludendosi temporaneamente dal sistema strutturale.
un’asta verticale le cui caratteristiche sono state ricavate trasformando le aste a croce di S. Andrea in una lastra di spessore equivalente. L’equivalenza è stata ottenuta tramite l’energia di deformazione che si accumula nei due sistemi per effetto di un’azione tangenziale.
Il primo vantaggio è rappresentato dalla facilità di creazione del modello: un unico elemento frame verticale (eventualmente suddiviso) sorretto dagli stralli.
Nell’esempio proposto si è passati da:
- 1675 elementi frame del modello dettagliato a 102 per la colonna equivalente;
- 878 nodi del modello dettagliato a 109;
il numero di elementi cable è lo stesso per entrambi i modelli (15 elementi). Il secondo vantaggio è stato rappresentato dal tempo impiegato dal calcolatore nello svolgimento dell’analisi. In generale, quando si svolge l’analisi non lineare in time history con integrazione diretta delle equazioni del moto, il programma deve compiere un grande numero di iterazioni per raggiungere la convergenza. Per il modello dettagliato i risultati venivano forniti dopo circa 3 ore dall’inizio del “run” perciò si doveva aspettare questo tempo per vedere l’effetto di una modifica. Il modello a colonna equivalente forniva i risultati in circa mezz’ora permettendo di fare molte più modifiche.
Sia l’analisi statica che l’analisi dinamica hanno fornito degli ottimi risultati, confermando la validità del modello proposto. Esso può essere convenientemente utilizzato per:
- condurre l’analisi dinamica velocemente nelle prime fasi della progettazione;
- avere un modello di confronto per confermare o smentire i risultati ottenuti con il modello dettagliato (qualora fosse mal impostato);
- eseguire l’analisi dinamica per le antenne strallate con altezza inferiore ai 200 m.