Appendice A
Dati del motoveicolo
%Quote ciclistiche an=0.7647; %m bn=0.6588; %m h=0.6622; %m
eps=deg2rad(-24.5); %inclinazione asse di sterzo %Ruote Iw1=0.470; %kgm^2 Iw2=0.710; %kgm^2 r1=0.300; %m r2=0.311; %m %Avancorsa e avanzamento av=0.036; %avanzamento m epsa=abs(eps);
tnorm=r1.*sin(epsa)-av; %avancorsa normale m tc=tnorm./cos(epsa); %avancorsa m %Parametri inerziali mt=287.1; %kg Ixm=11.8; %kgm^2 Iym=50.9; %kgm^2 Izm=44.1; %kgm^2 115
116 Izxm=4; %kgm^2 Ixf=0; %kgm^2 Iyf=0; %kgm^2 Izf=0.750; %kgm^2 %Motore Ie=0.14251; tau=1.42; %Parametri aerodinamici hd=0.700; %m wd=0.1; %m CxS=0.35; den_aria=1.29; %kg/m^3
Appendice B
Implementazione Simulink del
modello semplificato
Nota: sono mostrati solo i blocchi principali di questo modello.
Figura B.1: Blocco Motoveicolo 117
118
119
Figura B.3: Calcolo della traiettoria
120
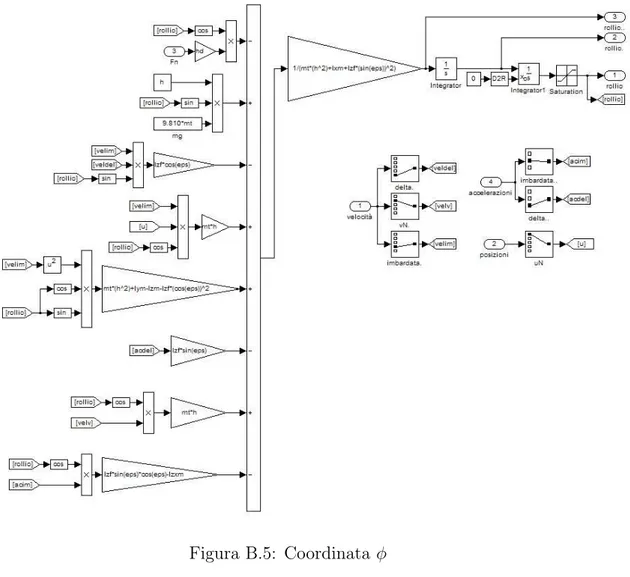
Figura B.5: Coordinata φ
121
122
123
Figura B.9: Coordinata uN
124
Figura B.11: Coordinata vN
Appendice C
Implementazione Simulink del
modello completo
Nota: sono mostrati solo i blocchi principali di questo modello.
Figura C.1: Blocco motoveicolo 125
126
127
128
129
130
Figura C.6: Coordinata vN
131
132
133
Figura C.10: Coordinata φ
134
135
Appendice D
Implementazione Simulink del
modello di pneumatico lineare
rilassato
Nota: sono mostrati solo i blocchi principali di questo modello.
Figura D.1: Blocco principale pneumatico anteriore
137
Figura D.2: Azioni dell’anteriore
Figura D.3: Angolo di deriva anteriore
138
Figura D.5: Derivata temporale dell’angolo di sterzo effettivo
139
Appendice E
Implementazione Simulink del
modello di pneumatico look-up
table
Nota: sono mostrati solo i blocchi principali di questo modello.
Figura E.1: Blocco principale pneumatico anteriore
141
Figura E.2: Azioni anteriore
Figura E.3: Angolo di deriva anteriore
142
Figura E.5: Derivata temporale dell’angolo di sterzo effettivo
143