Modellazione avanzata
3.1
Capitolo 3
Modellazione avanzata
La modellazione avanzata di macchina ha avuto come base il caso studio del capitolo 2, ovvero una macchina reale di produzione Ansaldo Energia S.P.A. con i seguenti dati di targa
Vn=18 kV
In=10.6 kA
S=330 MVA
P= 280 MW
Cos(fi)=0.85
Modellazione avanzata
3.2
5.1 Struttura del modello denominato: “Modello a doppia saturazione disaccoppiata”
Questo modello, relativo alle condizioni di funzionamento a regime sinusoidale simmetrico, si prefigge lo scopo di permettere un trattazione generale della macchina indipendente dalla struttura rotorica, ovvero a prescindere dall’eventuale presenza di anisotropia macroscopica. La logica di tale modello prevede di:
*decomporre la FMM dovuta alla reazione di indotto in due componenti sinusoidali allineate rispettivamente con l’asse polare e con quello interpolare, determinando così le due quote comunemente denominate di asse d e di asse q;
*sommare algebricamente la quota di asse d alla FMM generata dall’avvolgimento di eccitazione determinando quindi la componente risultante di asse diretto
*determinare per ciascuna delle FMM risultanti di asse d e q i relativi valori di induzione di prima armonica al traferro di macchina, trascurando le interazioni tra le due componenti
*calcolare conseguentemente i contributi di flusso principale concatenato con le fasi statoriche dovuti a ciascuna delle componenti di induzione sopra determinate e determinare così il flusso principale risultante concatenato alla fase di riferimento statorica
*Sommare al suddetto flusso principale la quota di flusso dovuto ai fenomeni di dispersione ottenendo così il flusso complessivo risultante concatenato alla fase di riferimento statorica
*determinare la tensione elettromagnetica complessiva originata dal suddetto flusso risultante tenendo conto della velocità di rotazione della macchina
*sommare alla tensione elettromagnetica la caduta Ohmica sulla resistenza di fase statorica, ottenendo così la tensione risultante.
Ai fini della parametrizzazione del modello diventa quindi fondamentale dedurre due funzioni i generale non lineari che diano i seguenti risultati:
𝑓𝑖𝑡𝑑(𝐼𝑑) = 𝑐𝑎𝑚𝑝𝑜 𝐵 𝑑𝑖 𝑎𝑠𝑠𝑒 𝑑𝑖𝑟𝑒𝑡𝑡𝑜 𝑓𝑖𝑡𝑞(𝐼𝑞) = 𝑐𝑎𝑚𝑝𝑜 𝐵 𝑑𝑖 𝑎𝑠𝑠𝑒 𝑑𝑖 𝑞𝑢𝑎𝑑𝑟𝑎𝑡𝑢𝑟𝑎
Per corrente Id si intende la composizione algebrica della corrente di asse diretto e della corrente dell’avvolgimento di eccitazione tramite un opportuno coefficiente.
Tale coefficiente è determinato dal rapporto delle correnti (di asse diretto e della corrente dell’avvolgimento di eccitazione) quando queste producano la stessa ampiezza di componente fondamentale di FMM.
La fitd(Id) è una funzione non lineare avente come input Id e come output il valore di prima armonica di campo di asse diretto presente nel traferro.
Modellazione avanzata
3.3
La fitq(Iq) è una funzione non lineare avente come input Iq ovvero la componente di asse q della corrente di armatore come output il valore di prima armonica di campo di asse di quadratura presente nel traferro.
Queste funzioni esposte sono ricavate per il caso studio ma sono replicabili, mantenendo la stessa procedura per qualsiasi macchina sincrona.
5.2 Costruzione del “Modello a doppia saturazione disaccoppiata”
La creazione del modello è basata su analisi FEM e la procedura è suddivisa in 2 step:
Eccitare la macchina con solo corrente di asse di quadratura di volta in volta crescente e valutare il campo di asse di quadratura
Eccitare la macchina con solo corrente di asse diretto di volta in volta crescente e valutarne il campo asse diretto
Una volta eseguiti i due step precedentemente descritti si ricavano le curve di magnetizzazione dei relativi assi.
5.3 Analisi di asse diretto
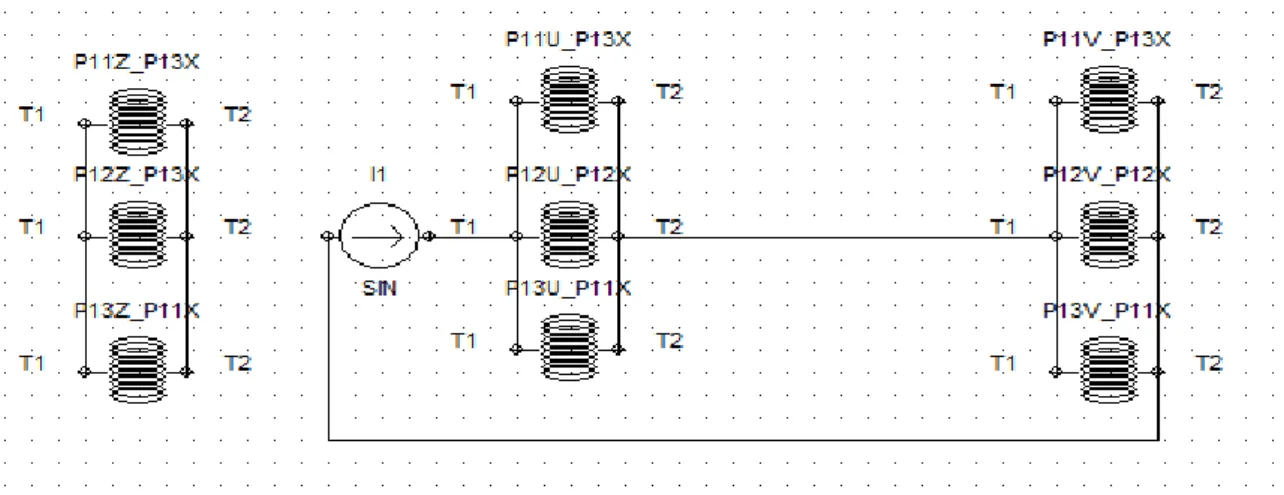
L’analisi sulla macchina è stata condotta con approccio magnetostatico alimentando la fase U in antiserie con V come nello schema riportato in figura 2, riproducendo quindi le condizioni istantanee che si osservano idealmente in caso di alimentazione con terna sinusoidale simmetrica quando la corrente nella fase Z è nulla.
Figura 2-configurazione degli avvolgimenti per il test di asse diretto
Il circuito è alimentato a corrente impressa con valori di corrente sempre crescenti e le ampiezze delle componenti fondamentali di campo B alla mezzeria geometrica di traferro sono stati calcolati utilizzando la trasformata di Fourier.
Modellazione avanzata
3.4
Nel presente documento sono riportati solamente tre casi di corrente che saranno denominati convenzionalmente
Caso a
Caso b
Caso c
In figura 3 è mostrata una mappa di campo |B| nel test di asse diretto relativa al caso “a”, dalla quale si evince una buona uniformità della magnetizzazione della zona centrale di rotore, mentre nei denti rotorici si osserva un maggior addensamento legato alla presenza delle cave. I valori di |B| sono comunque molto piccoli in questa prova infatti il massimo valore riscontrato è 0.31 T.
Figura 3-mappa di B nel test di asse diretto (caso a)
In figura 4 è riproposto il caso “a” avente un zoom accentuato in modo da notare l’addensamento di B nei denti rotorici.
Modellazione avanzata
3.5
Figura 4- mappa di B nel test di asse diretto (caso a)
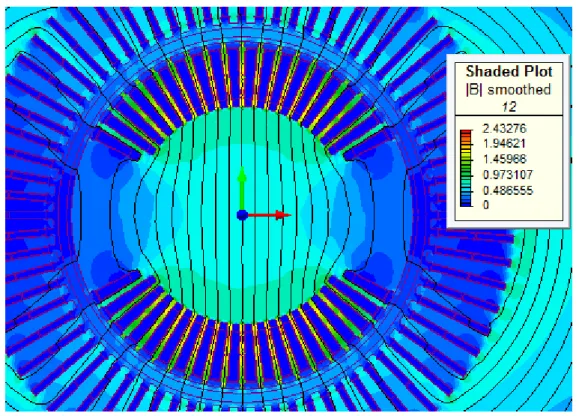
In figura 5 è mostrata una mappa di campo |B| nel test di asse diretto relativa al caso “b”, dalla quale si evince una buona uniformità della magnetizzazione della zona centrale di rotore, mentre nei denti rotorici si osserva un maggior addensamento legato alla presenza delle cave. I valori di |B| sono molto grandi in questa prova infatti il massimo valore riscontrato è 2.8 T. Questa è una condizione sicuramente di non normale operatività della macchina in quanto è presente una fortissima saturazione che stresserebbe termicamente e magneticamente la macchina. Nella sezione centrale di rotore il valore di induzione arriva a circa 1.7 T, cioè nel ginocchio del materiale impiegato in questa.
Figura 5- mappa di B nel test di asse diretto (caso b)
Nel immagine 6 è riproposto il caso “b”, rispetto alla figura 5 si ha un maggior zoom nella zona rotorica. Si evince una saturazione spinta nei denti rotorici posti vicini all’asse polare, in cui il campo di
Modellazione avanzata
3.6
induzione arriva ad essere circa fino a 1.5 volte quello della sezione centrale, questo perché si ha una strizione della sezione dovuta alla presenza delle cave. E’ evidente una saturazione spinta nei denti statorici posti di fronte all’asse polare. La saturazione sì ha nelle zone più vicino al traferro, ovvero le parti terminali dei denti, in quanto i denti hanno una forma tipo trapezio, e con l’aumento della distanza radiale si ha un incremento della sezione e quindi per la continuità del flusso si ha un indebolimento dell’induzione.
Figura 6-mappa di B nel test di asse diretto (caso b)
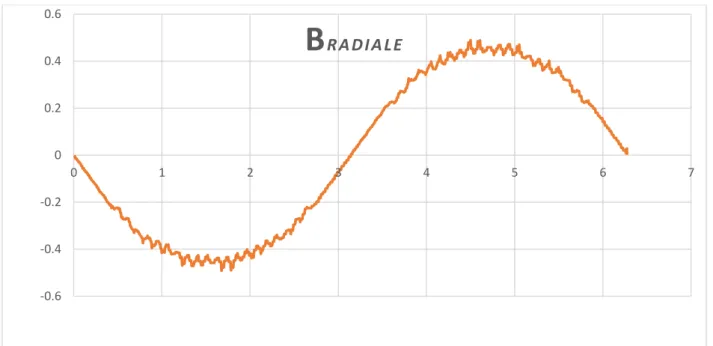
Nella figura 7 è proposto il grafico del valore del campo di induzione, della sola componente radiale misurato nel traferro, si nota come nella zona in prossimità dell’asse polare si abbia un aumento consistente del flusso, in quanto si ha una zona libera dalla presenza di cave che quindi senza elementi che ostacolino il passaggio del flusso.
Figura 7-andamento di B radiale nel caso"b"
-1.5 -1 -0.5 0 0.5 1 1.5 0 1 2 3 4 5 6 7
Bradiale
Modellazione avanzata
3.7
Inoltre nella zona che và dall’ordinata 0 a circa 1, ovvero nella zona di traferro che è interposta tra l’asse polare e interpolare si affaccia sulle cave si ha un’oscillazione del flusso anche piuttosto marcata dovuta all’intervalli dente-cava-dente-cava. Il valore della compente di asse diretto risulta essere 0.9403793 T.
In figura 8 è riportato l’andamento dell’induzione nel traferro come nel caso precedente ma è stato analizzata la sola componente tangenziale di campo. È intuitivo come il valore massimo arrivi a circa 0.1 T ovvero il 10% della massima componente radiale. Questo valore è da considerarsi un buon risultato per questo tipo di macchine elettriche.
Figura 8-andamento di B tangenziale nel caso"b"
Il caso “c” presenta un valore di corrente è notevolmente superiore alla corrente nominale ed è per questa ragione che i campi hanno valori particolarmente elevati. In figura 9 è proposto la mappa di induzione sempre riguardante il caso di solo flusso di asse diretto, con macchina in forte di saturazione.
-0.15 -0.1 -0.05 0 0.05 0.1 0.15 0 1 2 3 4 5 6 7
btan
Modellazione avanzata
3.8
Figura 9-mappa di induzione nel caso "c"
Nella figura 10 si ha uno zoom sulla zona rotorica e si nota come solo le prime cave vicine all’asse polare siano sature, mentre la saturazione diminuisca drasticamente verso l’asse interpolare.
Figura 10-mappa di induzione nel caso "c"
In figura 11 è proposto il campo nella zona di traferro riferita al caso “c”, una saturazione delle cave sia di statore che di rotore nella prossimità dell’asse polare.
Modellazione avanzata
3.9
Figura 11-mappa di induzione nel caso "c"
Dalla figura 11 si nota una saturazione marcata nelle parti terminali dei denti sia statorici che rotorici prossimi all’asse polare.
In figura 12 è proposto il campo nella zona di traferro riferita al caso “c”, si nota un aumento considerevole del campo nella zona dell’arco polare rispetto ad una funzione sinusoidale, andamento che si aspetterebbe nel caso ideale. Tale campo è calcolato nel traferro ad un raggio di 0.63 m.
Figura 12-campo di induzione radiale al traferro
In figura 13 è mostrato il campo tangenziale relativo al caso “c”, in cui si nota un valore massimo maggiore di 0.15 tesla, ovvero maggiore al 10% riscontrato nel caso precedente, ma è vero che la macchina si trova anche in forte saturazione.
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 0 1 2 3 4 5 6 7
B
radiale
Modellazione avanzata
3.10
Figura 13-campo di induzione tangenziale al traferro
Nel grafico di figura 14 è riportato l valore del campo di asse diretto rispetto alla corrente che lo ha generato, si nota come questa curva sia del tutto simile alla curva b-h del ferro. Si nota come il ginocchio sia circa 1.2 T.
Figura 14-caratteristica di magnetizzazione dell'asse diretto
-0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0 1 2 3 4 5 6 7
btan
Modellazione avanzata
3.11
5.4 Analisi di asse di quadratura
L’analisi sulla macchina è stata condotta alimentando la fase a in antiserie con b come nello schema riportato in figura 15
Figura 15-setup per test di quadratura
Il sistema funzionante a corrente impressa è stato alimentato a correnti sempre crescenti con il rotore ruotato di 90° rispetto al caso di test di asse diretto.
Per il test di asse di quadratura in questo documento sono riportate le mappe di soli 2 casi:
Caso “d”
Caso “e”
Modellazione avanzata
3.12
Figura 16-mappa di induzione del caso “d”
In figura 17 si ha uno zoom sulla zona rotorica dove si nota una progressiva smagnetizzazione delle cave passando dall’asse di quadratura a quello diretto
Figura 17- mappa di induzione del caso “d” .
Modellazione avanzata
3.13
Figura 18-mappa di induzione del caso “d” dove si nota la saturazione dei denti rotorici
In figura 19 è mostrato l’andamento del campo radiale nel caso “d”, dove nella zona dei massimi valori di campo si notano le oscillazioni dovute all’alternanza dente-cava.
Nei grafici sottostanti è mostrato l’andamento dei campi nel traferro nelle due componenti ovvero radiale e tangenziale
Figura 19-Valore di induzione radiale al traferro nel caso "d"
-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0 1 2 3 4 5 6 7
B
RA D I A LE
Modellazione avanzata
3.14
Figura 20-andamento del campo di induzione tangenziale nel caso "d"
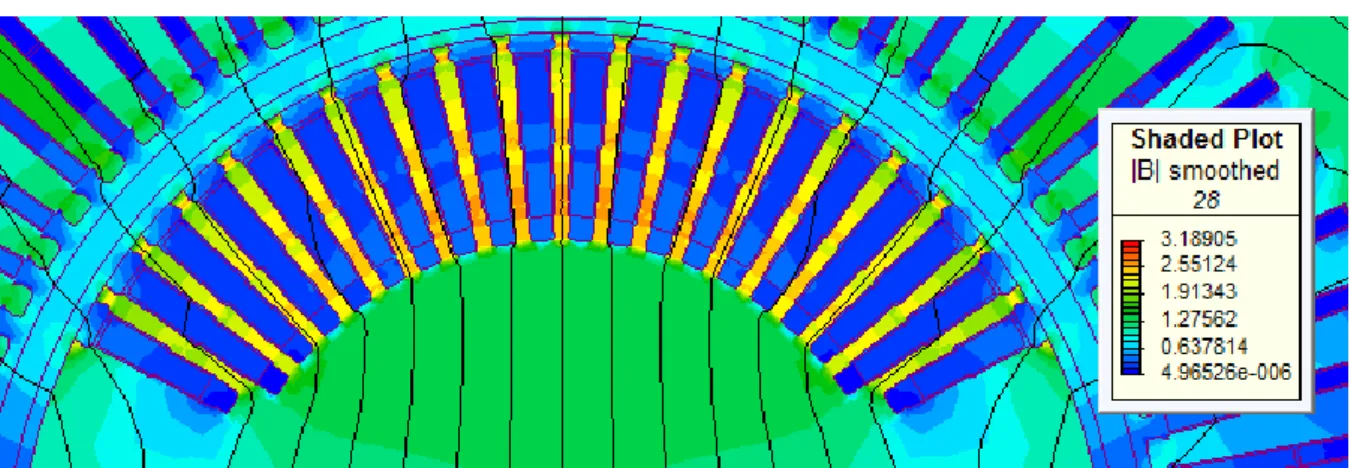
Nella figura 8 mostra i valori di induzione per una corrente molto maggiore della nominale, infatti il valore massimo del campo arriva a 3.19 T, ovvero un valore decisamente superiore ai 2, il massimo valore di campo ammesso.
(Ora sono calcolati a 18 ka)
Figura 21-mappa di induzione nel test di asse di quadratura riferita al caso "e"
In figura 22 si ha uno zoom sulla zona rotorica.
-0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1 0 1 2 3 4 5 6 7
btan
Modellazione avanzata
3.15
Figura 22-mappa di induzione relativa al caso "e"
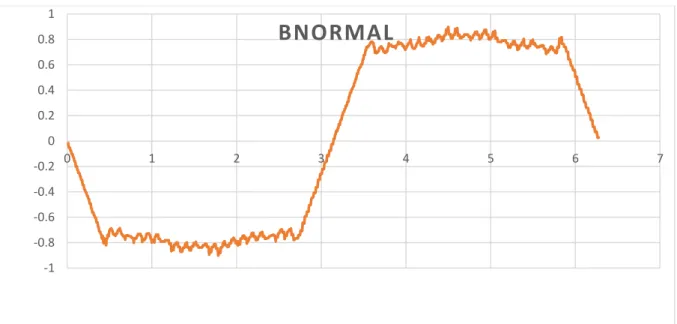
In figura 23 si ha l’andamento del campo radiale nella zona di traferro, tale campo è quello relativo al caso “e”, si nota che la forma del campo radiale non assomiglia ad una sinusoide, questo è dovuto alla saturazione delle cave prossime all’asse di quadratura, mentre le cave più esterne sono abbastanza scariche, nel caso “d” non essendo così in saturazione l’andamento del campo era molto più simile ad una sinusoide.
Figura 23-grafico del valore della componente radiale di induzione al traferro relativa al caso “e”
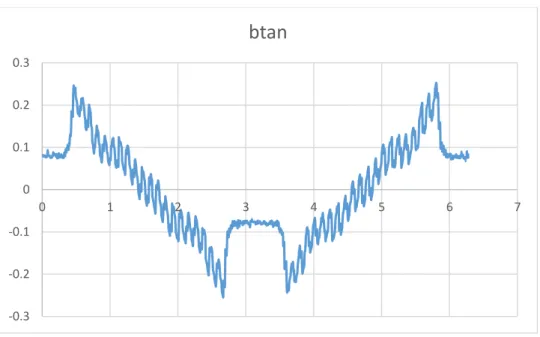
In figura 24 è mostrato l’andamento del campo tangenziale relativa al caso “e”
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 0 1 2 3 4 5 6 7
BNORMAL
Modellazione avanzata
3.16
Figura 24-grafico del valore della componente tangenziale di induzione al traferro relativa al caso “e”
In figura 25 è riportata la caratteristica di magnetizzazione dell’asse di quadratura, questa presenta una curva molto più smussata rispetto al test di asse diretto, in quanto qui si ha una saturazione graduale dei denti rotorici all’aumentare della corrente, cosa che nel test di asse diretto non succede in quanto si ha una brusca saturazione una volta raggiunto il ginocchio.
Figura 25-caratteristica B-I relativa all'asse di quadratura
-0.3 -0.2 -0.1 0 0.1 0.2 0.3 0 1 2 3 4 5 6 7
btan
Modellazione avanzata
3.17
5.5 Creazione delle funzioni di fitting
Dalle prove effettuate sulla macchina si ha il grafico 26 ovvero sull’asse delle ordinate si ha la corrente di asse di quadratura, mentre nell’ asse delle ascisse si ha il valore del campo di induzione magnetica relativa alla compente di quadratura rilevato nel traferro.
Figura 26-fitting dei valori di Bq rispetto alla corrente Iq
Da questa curva di fitting è stata ricavata una funzione in Matlab che dato in ingresso il valore di Iq restituisce il valore di Bq.
Modellazione avanzata
3.18
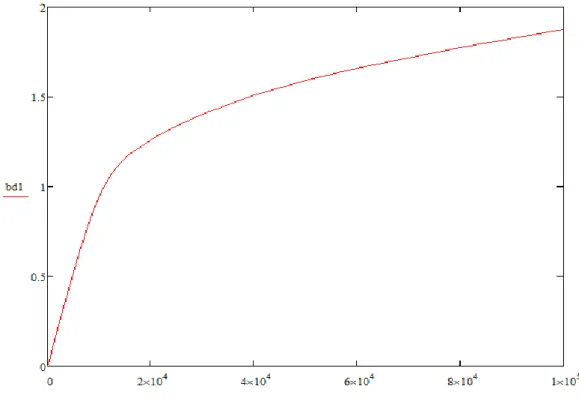
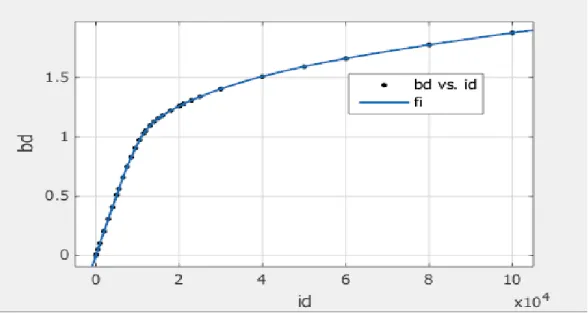
Figura 27- fitting dei valori di Bd rispetto alla corrente Id
Da questa curva di fitting è stata ricavata una funzione in Matlab che dato in ingresso il valore di Id restituisce il valore di Bd.
5.6 Test del modello
Il modello ovvero la composizione delle due funzioni:
𝑓𝑖𝑡𝑑(𝐼𝑑) = 𝑐𝑎𝑚𝑝𝑜 𝐵 𝑑𝑖 𝑎𝑠𝑠𝑒 𝑑𝑖𝑟𝑒𝑡𝑡𝑜 𝑓𝑖𝑡𝑞(𝐼𝑞) = 𝑐𝑎𝑚𝑝𝑜 𝐵 𝑑𝑖 𝑎𝑠𝑠𝑒 𝑑𝑖 𝑞𝑢𝑎𝑑𝑟𝑎𝑡𝑢𝑟𝑎
Per testare il modello è stata creata una combinazioni lineare di correnti, ovvero ci sono 5 combinazioni di correnti (Id,Iq) aventi tutte lo stesso rapporto una con l’altra. Questa combinazione è chiamata:
Caso “f”
Nel grafico 28 è riportato in rosso l’andamento del campo di asse diretto ricavato da magnet, mentre la curva blu è ricavata tramite la curva 𝑓𝑖𝑡𝑑(𝐼𝑑), ovvero tenendo conto della sola corrente di asse diretto.
Modellazione avanzata
3.19
Figura 28-confrontro tra i campi ricavati dal modello e nel FEM nel caso “f”
In figura 29 sono calcolati gli errori percentuali dei campi del caso “f” rispetto alle simulazioni statiche effettuate in magnet.
Figura 29- andamento degli errori percentuali sui campi calcolati con il modello rispetto al FEM nel caso “f” Nel grafico 30 è riportato in blu l’andamento del campo di asse di quadratura ricavato da magnet, mentre la curva rossa è ricavata tramite la curva 𝑓𝑖𝑡𝑞(𝐼𝑞), ovvero tenendo conto della sola corrente di asse di quadratura.
Modellazione avanzata
3.20
Figura 30-andamento dei campi di quadratura sia calcolati con il modello che con il FEM nel caso “f”
In figura 31 sono calcolati gli errori percentuali del caso “f” rispetto alle simulazioni statiche effettuate in magnet. Si nota che al crescere dell correnti si ha un tendenziale generale aumento dell’errore
Modellazione avanzata
3.21
Dagli andamenti degli errori si nota come questi assumono dei valori rilevanti che pregiudicano una buona analisi di macchina, quindi si è deciso di produrre un modello per il calcolo dei campi di un livello maggiore di complessità.
5.7 Struttura del modello denominato: “Modello con mappatura magnetica
interpolata”
Questo modello, relativo alle condizioni di funzionamento a regime sinusoidale simmetrico, si prefigge lo scopo di permettere un trattazione generale della macchina indipendente dalla struttura rotorica, ovvero a prescindere dall’eventuale presenza di anisotropia macroscopica. La logica di tale modello prevede di:
1. Decomporre la FMM dovuta alla reazione di indotto in due componenti sinusoidali allineate rispettivamente con l’asse polare e con quello interpolare, determinando così le due quote comunemente denominate di asse d e di asse q;
2. Sommare algebricamente la quota di asse d alla FMM generata dall’avvolgimento di eccitazione determinando quindi la componente risultante di asse diretto
3. Determinare per ciascuna coppia delle FMM risultanti di asse d e q, la decomposizione dell’induzione al traferro lungo l’asse polare e l’asse interpolare relativo alla prima armonica. 4. Calcolare conseguentemente i contributi di flusso principale concatenato con le fasi statoriche dovuti a ciascuna delle componenti di induzione sopra determinate e determinare così il flusso principale risultante concatenato alla fase di riferimento statorica
5. Sommare al suddetto flusso principale la quota di flusso dovuto ai fenomeni di dispersione ottenendo così il flusso complessivo risultante concatenato alla fase di riferimento statorica 6. Determinare la tensione elettromagnetica complessiva originata dal suddetto flusso risultante
tenendo conto della velocità di rotazione della macchina
7. Sommare alla tensione elettromagnetica la caduta Ohmica sulla resistenza di fase statorica, ottenendo così la tensione risultante.
Ai fini della parametrizzazione del modello diventa quindi fondamentale dedurre due funzioni i generale non lineari che diano i seguenti risultati:
𝑏𝑑𝑓𝑖𝑡(𝐼𝑞, 𝐼𝑑) = 𝑐𝑎𝑚𝑝𝑜 𝐵 𝑑𝑖 𝑎𝑠𝑠𝑒 𝑑𝑖𝑟𝑒𝑡𝑡𝑜 𝑏𝑞𝑓𝑖𝑡𝑞(𝐼𝑞, 𝐼𝑑) = 𝑐𝑎𝑚𝑝𝑜 𝐵 𝑑𝑖 𝑎𝑠𝑠𝑒 𝑑𝑖 𝑞𝑢𝑎𝑑𝑟𝑎𝑡𝑢𝑟𝑎
La bdfit(Iq,Id) è una funzione non lineare avente come input Iq,Id e come output il valore di prima armonica di campo di asse diretto presente nel traferro.
La bqfit(Iq,Id) è una funzione non lineare avente come input Iq,Id e come output il valore di prima armonica di campo di asse di quadratura presente nel traferro.
Queste funzioni esposte sono ricavate per il caso studio ma sono replicabili, mantenendo la stessa procedura per qualsiasi macchina sincrona.
5.7.1 Costruzione del “Modello con mappatura magnetica interpolata”
Modellazione avanzata
3.22
Creazione di un sequenza di correnti da utilizzare negli step successivi
Eccitare la macchina con solo corrente di asse di quadratura di volta in volta crescente e valutare il campo di asse di quadratura e di asse diretto
Eccitare la macchina con una corrente che trasformata secondo park abbia di volta in volta una fase crescente di 15° elettrici a step. Valutando la coppia dei campi di asse diretto e quadratura al traferro
Eccitare la macchina con solo corrente di asse diretto di volta in volta crescente e valutarne il campo asse diretto e quadratura al traferro
Una volta eseguiti i 4 step precedentemente descritti si ricavano 4 set di vettori: 𝐼𝑑
⃗⃗⃗ , 𝐼⃗⃗⃗ , 𝐵𝑞 ⃗⃗⃗⃗ , 𝐵𝑑 ⃗⃗⃗⃗ 𝑞
si ricavano i punti in 2 mappe tridimensionali aventi in asse X i valori di Iq, in Y i valori di Id, in Z nella prima mappa di Bq, nella seconda di Bd.
Si crea un opportuno fitting di questi punti attraverso funzioni adeguate
5.8 Analisi dei campi relativi ad una caso “g” di corrente
In figura 31 è riportata la mappa di induzione relativa al caso g
Modellazione avanzata
3.23
Figura 32-grafico relativo al campo radiale acquisito nel traferro, caso “g”
Figura 33-grafico relativo al campo tangenziale acquisito nel traferro, caso “g” I valori relativi ai capi di prima armonica sono:
Bd=1.09525
Bq=0.10538
Il modello è ottenuto dal fitting dei dati di varie simulazioni statiche si è ottenuto un set di vettori 𝐼𝑑
⃗⃗⃗ , 𝐼⃗⃗⃗ , 𝐵𝑞 ⃗⃗⃗⃗ , 𝐵𝑑 ⃗⃗⃗⃗ 𝑞
Ogni vettore ha dimensione 131x1.
-1.5 -1 -0.5 0 0.5 1 1.5 0 1 2 3 4 5 6 7
B
radiale
-0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25 0 1 2 3 4 5 6 7b
tangenziale
Modellazione avanzata
3.24
Per il fitting dei dati è stata utilizzata un app apposita di Matlab denominata “curve fitting tools” In questa app sono stati inseriti i valori delle correnti. Per ogni asse è stato creata una fitting, quindi si è proceduto creando due tris di combinazioni ovvero
1. Id, Iq,Bq 2. Id, Iq,Bd
Dalla prima funzione si è originata la funzione Bqfit
𝐵𝑞𝑓𝑖𝑡(𝐼𝑞, 𝐼𝑑) = 𝑐𝑎𝑚𝑝𝑜 𝐵 𝑑𝑖 𝑎𝑠𝑠𝑒 𝑑𝑖 𝑞𝑢𝑎𝑑𝑟𝑎𝑡𝑢𝑟𝑎 Questa è stata creata impostando come parametri:
La funzioneLowess
PolinomioCubic
Span20
Robust Off
La mappa 3d risultante da questo fitting dei dati è riportata in figura 34
Figura 34-mappa 3d interpolante del campo Bq relativa al modello “mappatura magnetica interpolata” Inoltre Matlab fornisce alcuni parametri riguardanti l’interpolazione
Figura 35-dati statistici riguardanti l'interpolazione La SSE è Sum of Squares Due to Error ovvero
Modellazione avanzata
3.25 Dove:
yi è il valore di dati osservato
fi è il valore previsto dal fit
wi è il peso applicato a ciascun punto di dati, di solito wi = 1 RMSE è lo scarto quadratico medio
Dalla seconda funzione si è originata la funzione Bdfit
𝐵𝑑𝑓𝑖𝑡(𝐼𝑞, 𝐼𝑑) = 𝑐𝑎𝑚𝑝𝑜 𝐵 𝑑𝑖 𝑎𝑠𝑠𝑒 𝑑𝑖𝑟𝑒𝑡𝑡𝑜 Questa è stata creata impostando come parametri:
La funzioneLowess
PolinomioCubic
Span20
Robust Off
La mappa 3d risultante da questo fitting dei dati è riportata in figura 36
Figura 36- mappa 3d interpolante del campo Bd riferita al modello di “mappatura magnetica interpolata”
5.9 Contronto del MMI con simulazioni Magnet
Il passo successivo è stato quello di confrontare il valori di output del fitting (per varie coppie di correnti (Id,Iq) ) con lo stesso set di input di simulazioni effettuate al FEM.
Di questi test ne sono riportati alcuni esempi chiamati per semplicità: 1. Caso 1
2. Caso 2 3. Caso 3
Nel caso 1 la corrente è quasi totalmente di asse diretto, nel caso 2 si ha una compente di asse diretta che lievemente maggiore della quadratura, nel caso 3 la componente predominante è quella di quadratura.
Modellazione avanzata
3.26
5.9.1 Caso 1
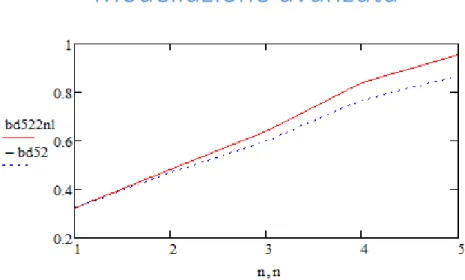
Nel grafico di figura 37 è riportato in rosso l’andamento del campo calcolato com il modello a MPI mentre in blu ottenuto da simulazioni FEM, in pratica si ha un’unica curva dovute alla pochezza dell’errore.
Figura 37-andamento del campo Bd sia utilizzando il modello a MMi che in magnet nel caso 1
Nel grafico di figura 38 è riportato in rosso l’andamento del campo calcolato com il modello a MMI mentre in blu ottenuto da simulazioni FEM, si nota come le due curve siano quasi coincidenti.
Figura 38-andamento dei campi calcolati con l' MMI e nel FEM nel caso 1
In figura 39 è riportato l’andamento dell’errore nel caso del campo di asse diretto in colore rosso e del campo di asse di quadratura in colore blu, tali errori sono sempre minori dell’un percento.
Modellazione avanzata
3.27
Figura 39-andamento dell’errore percentuale del campo Bd calcolato con il modello a mpi rispetto al Fem nel caso 1 In figura 40 è riportato l’andamento dell’errore nel caso del campo di asse di quadratura, tali errori sono sempre minori del 3 percento.
5.9.2 Caso 3
Figura 40-andamento del campo Bd sia utilizzando il modello a MMI che in magnet nel caso 3
In figura 41 è riportato l’andamento degli errori nel caso 3 relativi al campo di asse d, questi errori al massimo raggiungono il 3 percento.
Modellazione avanzata
3.28
Figura 41-Errore percentuale del campo Bd calcolato con il modello a mpi rispetto al Fem nel caso 3
In figura 42 è riportato l’andamento di Bq calcolato con l’MMi e ricavato da simulazione Fem relative al caso, in rosso si ha il campo calcolato con MMI, in blu il campo ricavato da analisi FEM.
Figura 42-andamento di Bq calcolato con il modello a MMI e Fem nel caso 3
5.9.3 Caso 2
Nel grafico di figura 43 è riportato in rosso l’andamento del campo calcolato con il modello a MMI mentre in blu ottenuto da simulazioni FEM, si nota come le due curve siano quasi coincidenti.
Modellazione avanzata
3.29
Figura 43- andamento di Bd calcolato con il modello a MMI e Fem nel caso 2
Nel grafico di figura 44 è riportato in rosso l’andamento del campo calcolato Bq con il modello a MMI mentre in blu ottenuto da simulazioni FEM, si nota come le due curve siano praticamente coincidenti.
Figura 44- andamento di Bq calcolato con il modello a MMI e Fem nel caso 2
In figura 45 è riportato l’errore riferito all’assq “D” riferito al confronto tra MMI e risultati di analisi Fem del caso 2
Modellazione avanzata
3.30
Figura 45-Errore percentuale del campo Bd calcolato con il modello a MMI rispetto al Fem nel caso 2
In figura 46 è riportato l’andamento dell’errore di asse di quadratura in colore rosso tali errori sono sempre minori dello 0.3 percento.
Figura 46-Errore percentuale del campo Bq calcolato con il modello a MMI rispetto al Fem nel caso 2
In figura 47 è riportato gli andamenti degli errori riferiti ai due assi (D e Q) nel confronto tra MMI e risultati di analisi Fem nel caso 2, in rosso sono graficati gli errori relativi all’asse “q” e in blu quelli relativi all’asse “d”. Tali errori sono inferiori sempre allo 0.6 percento.
Modellazione avanzata
3.31