Capitolo 5
Architetture a confronto
Chiarite le caratteristiche delle architetture prese in esame, vediamo ora i risultati ottenuti dalle simulazioni in MATLAB dei modelli Simulink finali, i cui schemi sono riportati in Figura 5.1.
Figura 5.1: Modelli Simulink finali delle architetture messe a confronto
Come si può vedere non è stato utilizzato alcun blocco di pre-distorsione, in quanto quello da noi preso in esame (vedi il “ δC PWM process” al Cap.2) non ha dimostrato di migliorare i livelli di distorsione del segnale di uscita quando il segnale di ingresso PCM viene sovracampionato a 352.8 kHz.
5.1 Misurazione delle prestazioni
Le prestazioni dei quattro amplificatori sono state valutate prendendo in esame:
• la distorsione armonica totale del segnale di uscita, indice della qualità del suono prodotto
• il rendimento di conversione (e quindi l’ efficienza) • il comportamento in frequenza
• la potenza erogata con segnale audio di ingresso nullo
Vediamo come sono state fatte le misure per ottenere questi parametri.
5.1.1 Distorsione armonica totale (THD)
Per calcolare la distorsione armonica totale del segnale di uscita è stato necessario innanzitutto ricavarne lo spettro in frequenza tramite la FFT. Dato che le simulazioni di MATLAB venivano fatte a passo variabile, per ottenere il vettore di valori necessari per il calcolo della FFT abbiamo campionato il segnale di uscita ad una frequenza fcF di 256
kHz. Il valore di questa frequenza è stato scelto in modo da essere certi che le alias prodotte col campionamento non andassero a falsare la misurazione in banda audio. Ciò si sarebbe verificato se il contenuto spettrale del segnale di uscita al filtro di Butterworth fosse stato eccessivamente elevato in corrispondenza di fcF-20 kHz; questo non
accadeva nel nostro caso (fcF=256 kHz; filtro di ordine 4) in quanto per fcF-20 kHz il
filtro di uscita attenuava di circa 90 dB.
Le simulazioni avevano la durata di 4 ms, dei quali i primi due venivano scartati in quanto il segnale audio non si era ancora stabilizzato. Con le scelte fatte abbiamo potuto calcolare grazie a MATLAB una FFT di 512 punti; con un opportuno algoritmo è stato
quindi possibile conoscere le componenti armoniche del segnale di uscita (o meglio, un valore ad esse proporzionale) e ricavare così la THD relativa alle prime dieci armoniche. A questo proposito va precisato che nel calcolo della potenza associata ad ogni componente spettrale la funzione di MATLAB relativa alla FFT introduce una costante moltiplicativa che falsa il valore dei risultati in termini assoluti; dato però che la THD è un rapporto, i valori di distorsione ricavati erano corretti.
5.1.2 Rendimento di conversione
Per avere un’idea dell’efficienza di un amplificatore audio, è importante conoscerne il rendimento di conversione (o più semplicemente “rendimento”), definito come il rapporto tra la potenza utile ceduta al carico e la potenza spesa dall’alimentazione:
Perogata Poututile =
η (5.1)
dove entrambe le potenze sono da intendersi espresse in valori medi.
La potenza di uscita “utile” è quella associata alla parte di segnale che contiene l’informazione; nel nostro caso il segnale di uscita era praticamente privo di valor medio, grazie alla configurazione “Full Bridge” dello stadio di potenza, e quindi come Pout abbiamo considerato il rapporto tra il quadrato del valore efficace della tensione di uscita e la resistenza di carico RL:
L eff R Vout Pout 2 = (5.2)
Per quanto riguarda invece la potenza erogata dall’alimentazione dello stadio di amplificazione, il suo valor medio in un periodo è dato da:
Perog =Vdd×ierog (5.3)
dove ierog è il valor medio della corrente erogata.
In realtà per conoscere il rendimento effettivo dei nostri amplificatori avremmo dovuto tener conto anche della potenza dissipata nella parte digitale, ossia in tutti i blocchi che precedevano lo stadio di potenza. Inizialmente abbiamo considerato tale quantità trascurabile rispetto alle potenze in gioco nello stadio di uscita; più avanti (Cap.6) vedremo che questa approssimazione è stata corretta.
5.1.3 Comportamento in frequenza
Allo scopo di conoscere le prestazioni degli amplificatori al variare della frequenza del segnale audio sono state fatte diverse simulazioni utilizzando come ingresso un segnale digitale ottenuto dal campionamento di uno analogico con andamento sinusoidale e frequenza variabile.
I parametri di uscita esaminati in questo modo sono stati due: Pout (che ci ha fornito la risposta in frequenza vera e propria, secondo la definizione riportata al Cap.2) ed η (rendimento).
5.2 Risultati delle simulazioni
Riportiamo di seguito gli andamenti relativi alle simulazioni fatte, prima in funzione della potenza del segnale di uscita e poi in funzione della frequenza, tenendo presente che in questo secondo caso le curve sono state ottenute soltanto per le architetture più interessanti dal punto di vista delle prestazioni, ossia AD1, AD2, AD3.
5.2.1 Variazione della potenza di uscita
Tutte le simulazioni in cui è stata variata l’ampiezza del segnale sinusoidale di partenza sono state fatte alla frequenza di 1 kHz, così come avviene convenzionalmente per gli amplificatori audio. L’origine di questa scelta non è casuale, ma dipende dal semplice fatto che l’orecchio umano a tale frequenza ha la migliore percezione sonora (Cap.1).
Le prime simulazioni sono state fatte con un carico da 4 Ω; successivamente abbiamo fatto qualche confronto tra le architetture per vedere come l’utilizzo di un carico da 8 Ω ne avrebbe modificato le prestazioni.
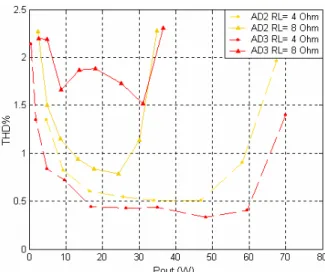
In Figura 5.2 riportiamo gli andamenti di rendimento e distorsione armonica al variare della potenza media sul carico.
Come mostra la Figura 5.2(a) per tutti gli amplificatori presi in considerazione al progressivo aumentare della potenza del segnale audio di uscita corrisponde un aumento dell’efficienza, che ha raggiunge i suoi valori massimi in corrispondenza della massima potenza disponibile sul carico.
In Figura 5.2(b) invece gli andamenti, che rappresentano la THD%, sono tutti caratterizzati da tre “intervalli”di potenza: quello intermedio, in cui la distorsione assume i valori minimi, e due estremi, in cui la distorsione aumenta notevolmente. Questo tipo di comportamento fa capire come gli amplificatori digitali siano in difficoltà a riprodurre fedelmente segnali audio con ampiezza (massima) prossima allo zero (M=0) o al valore “di saturazione” (M=1), in corrispondenza del quale Nword=2N –1.
Figura 5.2: Andamenti del rendimento (a) e della THD (b) delle architetture simulate
Nel primo caso il problema è rappresentato dal rapporto segnale-rumore del segnale di ingresso: se l’informazione è rappresentata con un numero inferiore di bit, questo significa necessariamente un peggioramento del SNR, che si ripercuote sulla
modulazione del segnale PWM e quindi sulla qualità del segnale audio di uscita. In più occorre ricordare che un segnale di ingresso più debole comporta una variazione minore del duty cycle del segnale PWM e quindi la presenza dei jitter (vedi Cap.2) provoca una maggior distorsione dell’informazione.
Per quanto riguarda l’aumento della THD in corrispondenza di valori elevati della potenza di uscita, bisogna tener conto del raggiungimento della saturazione del segnale durante l’elaborazione digitale. Per valori di ingresso prossimi alla saturazione può infatti verificarsi col Noise Shaping il raggiungimento del valore di fondo scala, che si traduce in un “taglio” del segnale audio in corrispondenza dei valori massimi di tensione. Per risolvere questo problema alcuni amplificatori utilizzano un circuito “distorcente”, che introduce una piccola distorsione per i segnali di ampiezza troppo elevata ottenendo in questo modo un miglioramento sui livelli di THD in corrispondenza dei valori massimi della potenza di uscita.
Comparativa tra le architetture
Come mostra Figura 5.2(b) le soluzioni progettuali più valide per quanto riguarda la distorsione del segnale di uscita sono quella reazionata con PEDEC analogico (AD1) e quella a catena diretta ispirata all’architettura DDX (AD3); la prima è migliore (seppure di poco) per valori di potenze di uscita inferiori al 65% della massima potenza ottenibile (pari circa a 70 W per entrambi), la seconda per potenze maggiori. In entrambi i casi la distorsione armonica (relativa alle prime 10 armoniche) si mantiene al di sotto dello 0.5% in corrispondenza di un intervallo della potenza del segnale circa pari a 45 W (10-53 W per AD1 e 15-60 W per AD3), che corrisponde ad una profondità di modulazione del 50% circa.
I risultati riportati in Figura 5.2(b) dimostrano anche la bontà del controllo reazionato con PEDEC, nonostante i modesti margini di correzione scelti in fase di progettazione (vedi l’utilizzo di una bassa KPEDEC nel Cap.4).
Nel caso di AD1 però le buone prestazioni in termini di distorsione introdotta non sono state ripetute in termini di efficienza; l’architettura col PEDEC infatti ha dimostrato di avere rendimenti molto più bassi rispetto agli altri amplificatori (Figura 5.2 (a)) e questo è sicuramente legato alla mancanza di un generatore di Dead Time. Come ci
aspettavamo infatti i tempi di ritardo dei MOSFET determinano durante le commutazioni del segnale PWM il verificarsi di cortocircuiti dell’alimentazione, provocando un incremento della potenza assorbita.
Per quanto riguarda AD3 invece, con un rendimento massimo del 98% ha dimostrato di essere l’architettura più efficiente, seguita dalle altre due che utilizzavano un circuito di DT.
Un aspetto importante da mettere in evidenza è che mentre il rendimento di AD1 scende velocemente con la potenza di uscita (è sotto l’ 85% giá per potenze di 30 W), per gli altri amplificatori i rendimenti rimangono al di sopra del 90% fino a Pout pari a 10 W, dimostrando un’elevata efficienza anche per segnali di ingresso più deboli.
L’ottimo comportamento dell’architettura con Damped Ternary Modulation (AD3) dal punto di vista del rendimento ha confermato le nostre aspettative, in quanto avevamo già visto (Cap.1) come l’utilizzo di una modulazione tri-state avrebbe permesso di assorbire meno potenza; inoltre siamo stati confortati dal fatto che queste prestazioni non venissero pagate con l’ introduzione di un’elevata distorsione sul segnale di uscita. Un’osservazione particolare va fatta infine a proposito di AD e AD2: i risultati delle simulazioni dimostrano come l’introduzione della reazione (vedi il generatore di Dead Time sostituito con un DTC) porti effettivamente benefici alle prestazioni dell’amplificatore, nonostante la semplicità del controllo reazionato adoperato.
Variazione del carico
Ci siamo chiesti a questo punto come sarebbero cambiate le prestazioni degli amplificatori sostituendo il carico con uno da 8 Ω. Abbiamo fatto due tipi di simulazioni, uno lasciando inalterato il filtro passa basso di uscita e l’altro modificandone i valori in modo da adattarlo al nuovo carico. Si ricorda infatti (Cap.3) che il dimensionamento dei componenti del filtro di Butterworth è stato fatto tenendo conto del valore del carico; utilizzare un carico da 8 Ω comporta un peggioramento del filtraggio e quindi della qualità del segnale di uscita.
Nelle simulazioni fatte non ci sono state interessanti cambiamenti per quanto riguarda i rendimenti degli amplificatori, ma ce ne sono stati andando a misurare la distorsione armonica. Prenderemo quindi in esame soltanto quest’ultima.
Sostituendo il carico ma lasciando inalterato il filtro abbiamo confrontato AD2 (con controllo reazionato digitale) e AD3 (a catena diretta).
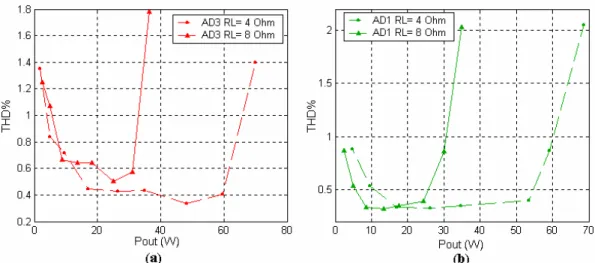
Come si può osservare dalla Figura 5.3, la presenza di una reazione in AD2 ha limitato notevolmente l’effetto distorcente provocato dall’utilizzo di un carico doppio rispetto a quello per cui era stato progettato il filtro di uscita. Questa è un’ulteriore conferma dell’efficacia del controllo reazionato digitale proposto. Per AD3 il peggioramento della qualità del segnale amplificato è evidente, in coerenza con i precedenti risultati (Cap.3) in cui avevamo variato la resistenza di uscita del circuito di alimentazione o quella dei MOSFET.
Figura 5.3: Distorsione del segnale di uscita in condizioni di disadattamanto del
carico, per AD2 e AD3
Abbiamo provato infine a modificare il filtro di uscita in AD3 e AD1 (con reazione analogica) per adattarlo al carico da 8 Ω. Come mostra Figura 5.4(a) in AD3 la distorsione introdotta era leggermente maggiore rispetto alla situazione col carico da 4 Ω, ma questo può dipendere anche dal fatto che Dead Time e intervalli di guardia erano stati scelti in modo da ottimizzare le prestazioni dell’amplificatore nelle condizioni di progetto.
Figura 5.4: Distorsione del segnale di uscita con carico RL= 8 Ω in AD3 (a) e AD1 (b)
È interessante osservare come per AD1 (Figura 5.4(b)) i livelli di distorsione non solo non sono peggiorati, ma sono risultati leggermente inferiori. In ogni caso possiamo ragionevolmente concludere che modifiche del carico, quando sono accompagnate da opportuni cambiamenti del filtro di uscita, non comportano rilevanti variazioni delle prestazioni delle architetture considerate.
5.2.2 Variazione della frequenza del segnale audio
Una volta analizzati i risultati delle simulazioni al variare di Pout, abbiamo deciso di lasciare da parte AD, che avevamo preso in considerazione più che altro come punto di riferimento per AD2 (che ha in più la reazione) e AD3 (che di diverso ha il tipo di modulazione adoperata).
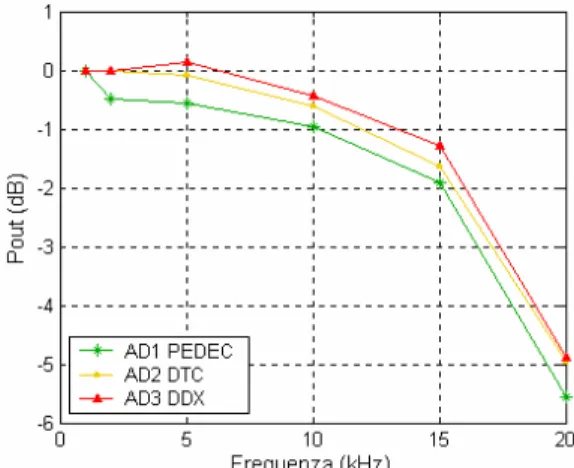
In Figura 5.5 sono riportati gli andamenti della potenza di uscita al variare della frequenza del segnale audio, normalizzati rispetto al valore rilevato ad 1 kHz e quindi espressi in dB.
Come era ovvio aspettarsi la potenza del segnale di uscita diminuisce con l’aumentare della frequenza e questo dipende dal comportamento in frequenza dei filtri presenti nelle architetture. In particolare nel nostro caso abbiamo usato nella sezione digitale un filtro di sovracampionamento di tipo FIR di ordine 32 e frequenza di taglio a –3 dB pari a
20.5 kHz (vedi Cap.2), in uscita un filtro passa basso di Butterworth del quarto ordine, con frequenza di taglio (a -3dB) di 20 kHz.
Figura 5.5: Risposte in frequenza
Un’analisi degli andamenti di Figura 5.5 ha permesso di misurare per AD1, AD2 e AD3 dei valori di larghezza di banda pari rispettivamente a circa 16.5 kHz, 17 kHz e 17.4 kHz. Anche sotto questo punto di vista quindi AD3 si è rivelata essere l’architettura migliore, seppure di poco, dimostrando di avere la larghezza di banda maggiore. Va inoltre precisato che sebbene la banda audio sia comunemente intesa fino a 20 kHz, difficilmente si ha l’occasione di udire suoni di frequenza maggiore a 17 kHz e pertanto da questo punto di vista i risultati ottenuti sono accettabili.
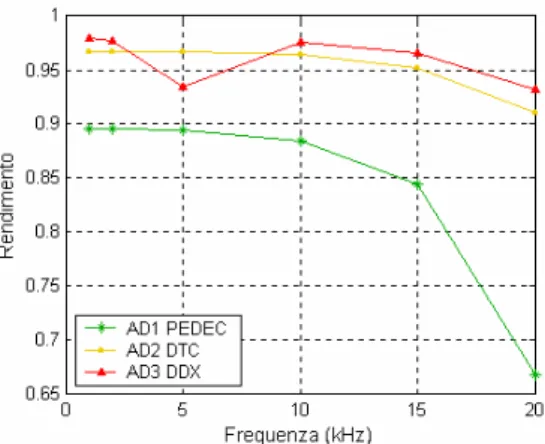
Consideriamo ora gli andamenti riportati in Figura 5.6, relativi alla variazione del rendimento degli amplificatori al variare della frequenza.
In questo caso le simulazioni sono state fatte utilizzando un segnale di ingresso tale da garantire in uscita una potenza pari al 70% della potenza massima.
Come si può vedere AD2 e AD3 hanno un elevato rendimento (superiore al 90%) su tutta la banda audio, mentre AD1 ha dimostrato di avere un’efficienza nettamente peggiore, inferiore alle altre due del 10% a 15 kHz. Questi risultati confermano quindi quanto già visto per segnali di ingresso a 1 kHz, ossia che AD1 è l’architettura con rendimenti più bassi.
Figura 5.6: Andamenti del rendimento degli amplificatori al variare della frequenza
(Pout≅70%Poutmax)
5.2.3 Potenza di uscita con segnale di ingresso nullo
Idealmente vorremmo che in assenza di segnale audio un amplificatore non assorba potenza, ma in realtà questo non accade mai. Un importante parametro di confronto tra le diverse architetture studiate è quindi la potenza erogata dall’alimentazione quando come ingresso veniva utilizzato un segnale PCM costante di valore pari a 2N-1, con
N=16. Assenza di segnale 0 50 100 150 200 250 300 350 400 450 500
AD1 AD2 AD AD3
Po te n z a (m W ) Perogata Pout
Figura 5.7: Valori di potenza assorbita in assenza di segnale
A conferma di quanto già sapevamo a proposito della modulazione PWM tri-state, l’amplificatore a catena diretta ha dimostrato di assorbire in assenza di segnale utile una
potenza veramente trascurabile, specie se paragonata a quella degli altri tre; in ogni caso i valori di potenza erogata dall’alimentazione non hanno superato i 450 mW (Figura 5.7). Occorre ricordare che finora abbiamo trascurato la potenza assorbita dalla circuiteria digitale; essa dipende sì dal tipo di sintesi scelta (su FPGA o in tecnologia CMOS), ma comunque abbiamo stimato essere inferiore in ogni caso ai 50 mW (Cap.6).
Quello della potenza assorbita in assenza di segnale di ingresso non è un dato di poca importanza, se si pensa che un amplificatore audio puó ricevere un ingresso nullo anche per tempi significativi; sotto questa luce l’architettura da preferire è sicuramente quella che abbiamo indicato con AD3.