Appendix B
Front-Wheel Drive Car Simulations
II
In this appendix we present other outcomes obtained simulating the front-wheel drive vehicle. We show both the potential of our ESP in case of oversteer and the influence of the sport tyres on the behavior of the vehicle and of the Active Yaw Control.
B.1
External Disturbance (Oversteer, 195/65-R15)
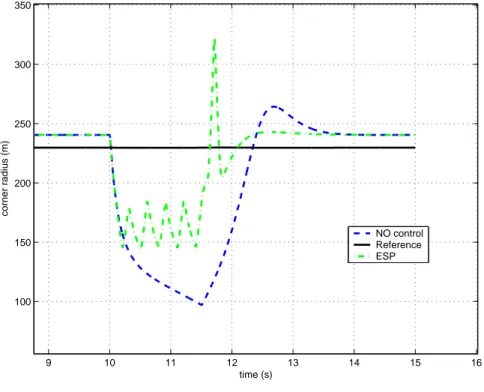
This simulation refers to a front-wheel drive vehicle equipped with tyres 195/65-R15 and subjected to an external lateral force for 2 s. The force magnitude is 2000 N (it is positive, hence it is directed towards the corner center) and it is applied 0.3 m ahead the center of gravity. The initial speed is 35 m
s and the steer angle is represented by a step function
which final value is 1.3 deg.
320 340 360 380 400 420 40 60 80 100 120 140 160 180 200 220 distance (m) NO control ESP NOT disturbed
9 10 11 12 13 14 15 16 100 150 200 250 300 350 time (s) corner radius (m) NO control Reference ESP Figure B.2: “R” distance 5 6 7 8 9 10 11 12 13 14 15 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 time (s) beta (deg) NO control ESP
5 6 7 8 9 10 11 12 13 14 15 0 1 2 3 4 5 time (s) α11 (deg) ESP NO control
Figure B.4: Front-inner tyre slip angle
10 11 12 13 14 15 0 100 200 300 400 500 time (s) Mb 11 (N*m) ESP
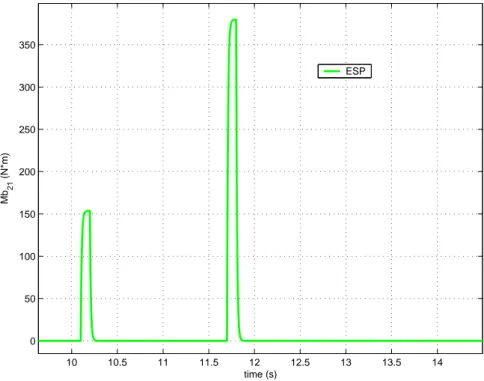
10 10.5 11 11.5 12 12.5 13 13.5 14 0 50 100 150 200 250 300 350 time (s) Mb 21 (N*m) ESP
Figure B.6: Brake torque applied to the rear-inner wheel
In this simulation we can observe a satisfactory drive path improvement (fig.B.1), and the ESP manages also to limit the variation of the body slip angle (fig.B.3). Clearly the central coupling in this manoeuvre cannot affect the car behavior.
B.2
High Speed (205/55-R15)
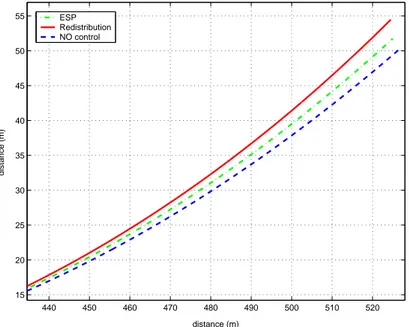
In this simulation we deal with a car provided with tyres which size is 205/55-R15, running
at the speed of 60 m
s. The steer angle function is a step with final value equal to 0.5 deg.
440 450 460 470 480 490 500 510 520 15 20 25 30 35 40 45 50 55 distance (m) distance (m) ESP Redistribution NO control
Figure B.7: Driven paths
4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 −4.5 −4 −3.5 −3 −2.5 −2 −1.5 −1 −0.5 0 time (s) beta (deg) ESP Redistribution NO control
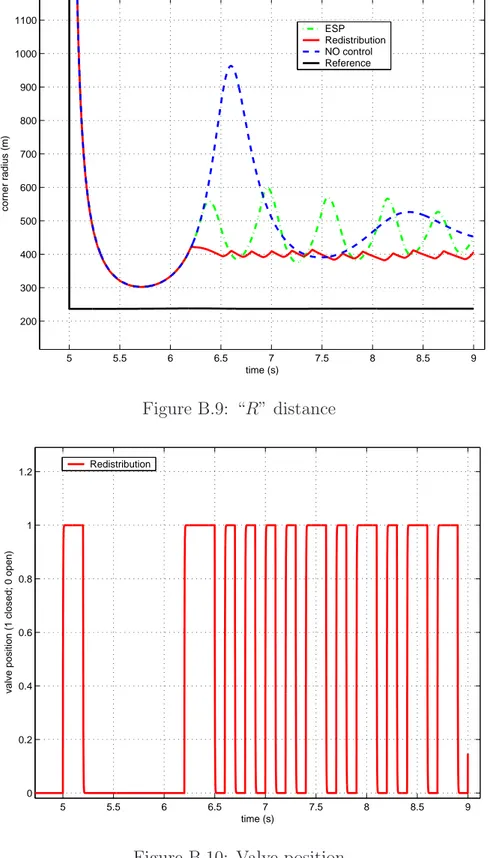
5 5.5 6 6.5 7 7.5 8 8.5 9 200 300 400 500 600 700 800 900 1000 1100 time (s) corner radius (m) ESP Redistribution NO control Reference Figure B.9: “R” distance 5 5.5 6 6.5 7 7.5 8 8.5 9 0 0.2 0.4 0.6 0.8 1 1.2 time (s)
valve position (1 closed; 0 open)
Redistribution
5 5.5 6 6.5 7 7.5 8 8.5 9 0 50 100 150 200 250 300 350 time (s) Mb 21 (N*m) ESP
Figure B.11: Brake torque applied to the rear-inner wheel
Also in this case, in spite of the tyre type, the results obtained are similar to the ones provided by the corresponding simulation illustrated in the main report (“High Speed”). Indeed we can notice an enhancing car motion, but it is not as remarkable as the improve-ment we can have in case of rear-wheel drive car.
B.3
Avoidance Manoeuvre (205/55-R15)
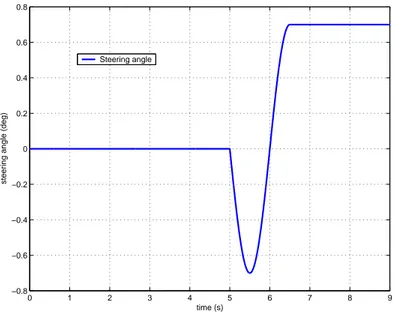
Here we illustrate the outcomes of the simulation concerning the manoeuvre executed by the vehicle in case the steer function is such a way to make the vehicle turn first to the right then to the left (fig.B.12). The car is provided with tyres which size is 205/55-R15
and the speed at the beginning is 60 m
s. 0 1 2 3 4 5 6 7 8 9 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 time (s)
steering angle (deg)
Steering angle
Figure B.12: Steer angle function
250 300 350 400 450 500 550 600 −8 −6 −4 −2 0 2 4 distance (m) distance (m) NO control Redisribution Redistribution & ESP ESP
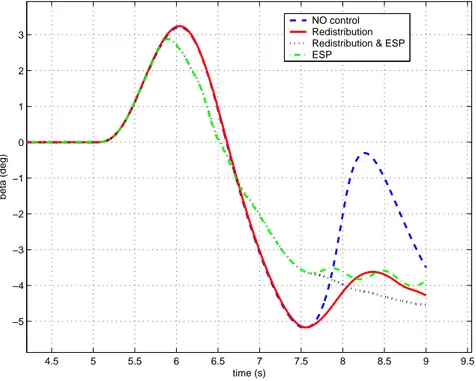
4.5 5 5.5 6 6.5 7 7.5 8 8.5 9 9.5 −5 −4 −3 −2 −1 0 1 2 3 time (s) beta (deg) NO control Redistribution Redistribution & ESP ESP
Figure B.14: Body slip angle
5 6 7 8 9 0 0.2 0.4 0.6 0.8 1 1.2 time (s)
valve position (0 open; 1 closed)
5 6 7 8 9 0 0.2 0.4 0.6 0.8 1 1.2 time (s)
valve position (0 open; 1 closed)
Redistribution & ESP Redistribution
5 6 7 8 9 0 100 200 300 400 500 time (s) Mb 11 (N*m) 5 6 7 8 9 0 100 200 300 400 500 time (s) Mb 11 (N*m)
ESP Redistribution & ESP
Figure B.16: Brake torque applied to the front-left wheel
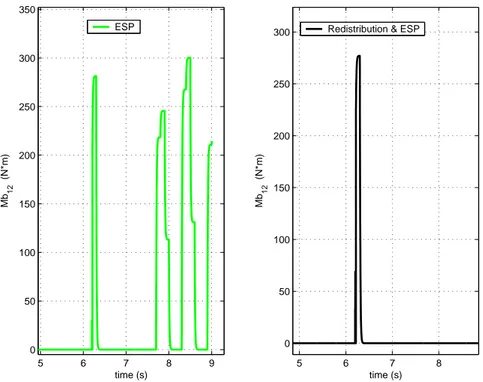
5 6 7 8 0 50 100 150 200 250 300 time (s) Mb 12 (N*m) 5 6 7 8 9 0 50 100 150 200 250 300 350 time (s) Mb 12 (N*m)
ESP Redistribution & ESP
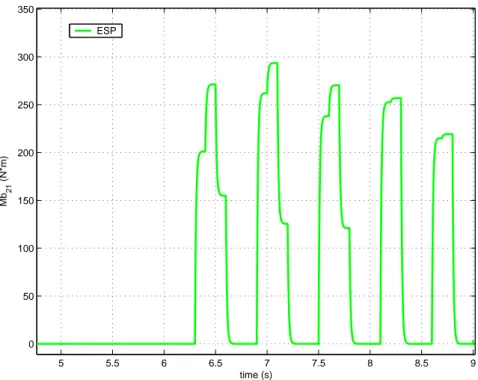
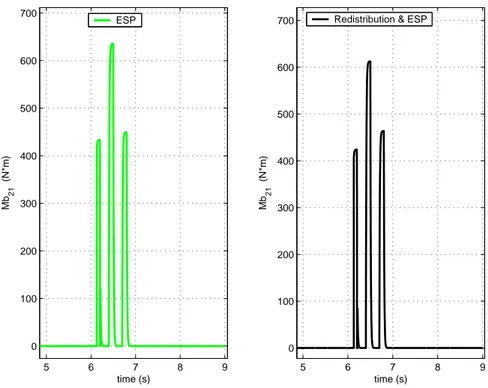
5 6 7 8 9 0 100 200 300 400 500 600 700 time (s) Mb 21 (N*m) 5 6 7 8 9 0 100 200 300 400 500 600 700 time (s) Mb 21 (N*m)
ESP Redistribution & ESP
Figure B.18: Brake torque applied at the rear-left wheel
5 6 7 8 9 0 0.2 0.4 0.6 0.8 1 1.2 time (s)
valve position (0 open; 1 closed)
5 6 7 8 9 0 0.2 0.4 0.6 0.8 1 1.2 time (s)
valve position (0 open; 1 closed)
Redistribution & ESP Redistribution
To supply the vehicle with the central coupling is almost useless in this manoeuvre. In fact only the body slip angle (fig.B.14) and the front-right brake performance (fig.B.17) present improvements, but they are not very appreciable.