Progetto preliminare di una missione multisatellite
di osservazione della Terra con propulsione elettrica
compatibile con il lanciatore VEGA
Lo Cicero Benedetto Simonini Luca
Anno accademico 2003-2004
T 154
INDICE GENERALE... 3
INDICE DELLE FIGURE ... 8
INDICE DELLE TABELLE ... 11
1 MOTIVAZIONI ED OBBIETTIVI DELLA TESI ... 13
1.1 Introduzione ... 13
1.2 Cenni storici sull’osservazione della terra ... 15
1.3 Stato attuale e tendenza della tecnologia spaziale. ... 16
1.4 Breve storia e tendenza attuale della propulsione elettrica... 20
1.5 Scopo della tesi ... 22
2 REQUISITI DI SISTEMA ... 25 2.1 Introduzione ... 25 2.2 Requisiti di funzionalità ... 25 2.3 Requisiti di missione ... 28 2.3.1 Generale ... 28 2.3.2 Vita utile... 28
2.3.3 Prodotto della missione ... 28
2.3.4 Tempo di rivisitazione... 28
2.3.5 Flessibilità ... 28
2.3.6 Requisiti di comunicazione ... 28
2.3.7 Requisiti sulla stazione a Terra. ... 29
2.3.8 Compatibilità con il lanciatore ... 29
2.3.9 Requisiti fondamentali sul carico pagante... 30
2.4 Deorbitamento... 31
2.5 Tempo di sviluppo... 31
3 INTRODUZIONE ALL’ASTRODINAMICA ... 32
3.1 Introduzione ... 32
3.2 Moto Kepleriano ... 32
3.2.1 Equazione di moto di un Satellite ... 33
3.3 Moto non Kepleriano...38
3.3.1 Variazioni secolari e periodiche...40
3.3.2 Perturbazioni...41
3.4 Manovre orbitali a bassa spinta...48
3.4.1 Complanari...49
3.4.2 Cambiamento di piano ...50
4 DETERMINAZIONE DELL’ORBITA ...53
4.1 Introduzione ...53
4.2 Formulazione del Problema...54
4.2.1 Caratterizzazione topografica ...54
4.2.2 Caratterizzazione di quota...54
4.2.3 Ricerca semiasse ed eccentricità ...56
4.2.4 Ricerca orbita limite...57
4.2.5 Procedure di controllo del satellite...58
4.2.6 Variazione semiasse maggiore ed eccentricità...58
4.2.7 Ricerca ∆V, incremento di velocità necessario al controllo...59
4.2.8 Calcolo rapporto tra massa di propellente e massa iniziale...60
4.3 Analisi delle diverse Configurazioni...61
4.3.1 Inclinazione 46° ...61
4.3.2 Inclinazione critica, 63.435° ...62
4.3.3 Analisi al propagatore orbitale STK ...64
4.4 Analisi della Resistenza ...69
4.5 Risultati...72
5 ANALISI DEL CARICO UTILE ...74
5.1 Introduzione ...74
5.2 Tipi di carico pagante...74
5.2.1 Sistemi per le telecomunicazioni ...75
5.2.2 Sensori per scopi scientifici ...76
5.2.3 Sensori per applicazioni varie ...76
5.3 Sistemi per Osservazione della Terra ...76
5.3.1 Laser...77
5.3.2 Geofisici...77
5.3.3 Spettrometri ...78
5.3.4 Spettrometri attivi ...78
5.3.5 Spettrometri passivi ...81
5.4 Tecnologie tipiche usate per i sensori...85
5.4.1 Introduzione ...85
5.4.2 Meccanismo per la scansione...85
5.4.3 Telescopio...86
5.4.4 Separatore spettrale...87
5.4.5 Piano focale...87
5.4.6 Apparato criogenico...88
5.5 Progetto del sistema ... 89
5.5.1 Introduzione ... 89
5.5.2 Stima configurazione generale ... 93
5.5.3 Stima dell’ottica del sistema ... 96
5.5.4 Stima dell’elettronica del sistema ... 102
5.6 Caratterizzazione del sistema ... 107
5.6.1 Risultati dell’analisi ... 107
5.6.2 Scelta effettuata... 109
5.7 Requisiti di puntamento e di posizionamento... 111
6 IL SISTEMA DI COMUNICAZIONE ... 116
6.1 Introduzione ... 116
6.2 Architettura del sistema ... 117
6.3 Scelta delle stazioni a terra... 118
6.4 Bilancio di Collegamento... 121
6.5 Scelta della componentistica ... 129
7 IL SISTEMA DI PROPULSIONE ... 133
7.1 Introduzione ... 133
7.2 Propulsori ad effetto Hall... 135
7.2.1 Introduzione ... 135
7.2.2 Principi generali di funzionamento ... 137
7.2.3 Propulsore di ottimo... 138
7.2.4 Propulsore esistente... 138
7.2.5 Propulsore nuovo ... 140
7.2.6 Tempi di accensione... 141
7.2.7 PPU ... 142
7.2.8 Sottosistema di stivaggio e distribuzione ... 143
7.3 Risultati... 144
8 IL SISTEMA GESTIONE DATI... 145
8.1 Introduzione ... 145
8.2 Architettura del sistema ... 145
8.3 Scelta dei componenti ... 148
8.3.1 Memoria di massa ... 148
8.3.2 Compressione immagini... 149
8.3.3 CPU controllo d’assetto ... 150
8.3.4 CPU sensori... 150
9 SISTEMA DI DETERMINAZIONE E CONTROLLO D’ASSETTO ...152
9.1 Introduzione ...152
9.2 Selezione dei modi di controllo ...152
9.3 Coppie di disturbo ...154
9.3.1 Aerodinamica...156
9.4 Radiazione solare ...156
9.4.1 Gradiente di gravità...157
9.4.2 Campo magnetico. ...157
9.4.3 Stima dei risultati ottenuti ...158
9.5 Selezione e scelta dei componenti ...158
9.5.1 Sensori ...159
9.5.2 Attuatori ...162
9.6 Conclusioni ...164
10 IL SISTEMA DI POTENZA...166
10.1 Introduzione ...166
10.2 Analisi delle Eclissi ...169
10.3 Pannelli Solari ...173
10.4 Celle Solari ...174
10.5 Analisi configurazione geometrica del Pannello ...177
10.6 Batterie ...182
10.7 Controllo e regolazione della potenza ...185
10.8 Configurazioni analizzate...186
10.9 Meccanismi per il dispiegamento ...197
11 IL SISTEMA DI NAVIGAZIONE...200 11.1 Introduzione ...200 11.2 Il sistema GALILEO ...202 12 STRUTTURA E CONFIGURAZIONE...204 12.1 Introduzione ...204 12.2 Requisiti strutturali ...204 12.3 Requisiti di configurazione ...206
12.4 Requisiti imposti dal lanciatore VEGA... 207
12.4.1 Introduzione ... 207
12.4.2 Architettura del sistema... 208
12.4.3 Dati tecnici e prestazioni ... 208
12.5 Analisi della configurazione ... 212
12.5.1 Corpo inferiore ... 212
12.5.2 Corpo superiore ... 217
12.5.3 Corpo centrale e struttura totale del satellite ... 220
13 SISTEMA DI CONTROLLO TERMICO ... 225
13.1 Introduzione ... 225
13.2 Caratteristiche fisiche del sistema ... 225
13.2.1 Intervalli di temperatura ... 225 13.2.2 Sorgenti di calore ... 227 13.2.3 Trasferimenti di calore ... 228 13.3 Analisi Termica ... 229 13.3.1 Ipotesi Semplificative... 233 13.3.2 Condizioni geometriche ... 233 13.3.3 Procedimento... 234 13.3.4 Risultati ... 236 14 CONCLUSIONI... 238 Introduzione ... 238
14.1 Riassunto del lavoro... 238
14.1.1 Analisi di missione ... 238
14.1.2 Progetto piattaforma ... 239
14.2 Conclusioni ... 246
INDICE DELLE FIGURE
figura 1.1.1 Schema del lavoro svolto...14
figura 1.3.1 Tendenza per i satelliti commerciali ...17
figura 1.3.2 Tendenza per i veicoli spaziali non pilotati della NASA ...18
figura 1.3.3 Principali clienti delle missioni spaziali ...19
figura 1.4.1 Un secolo di tecnologia ...22
figura 2.2.1 Bacino del Mediterraneo...26
figura 2.2.2 Protezione civile ...26
figura 2.2.3 Controllo delle coste ...27
figura 2.2.4 Attività commerciali ...27
figura 2.3.1 Schema dell’AVUM modulo superiore verniero di assetto ...30
figura 2.3.2 Volume disponibile (statico + dinamico) ...30
figura 3.2.1 Elementi orbitali classici...36
figura 3.2.2 Elementi orbitali classici sul piano. ...37
figura 3.3.1 Variazione periodica e secolare di un parametro orbitale...41
figura 3.3.2 Effetto di J2. ...42
figura 3.3.3 Esempio di decadimento orbitale. ...48
figura 3.4.1 Cambiamento di piano orbitale...51
figura 4.2.1 Bacino del mediterraneo ...54
figura 4.2.2 Requisiti ci velocità caratteristici per manovre planari...60
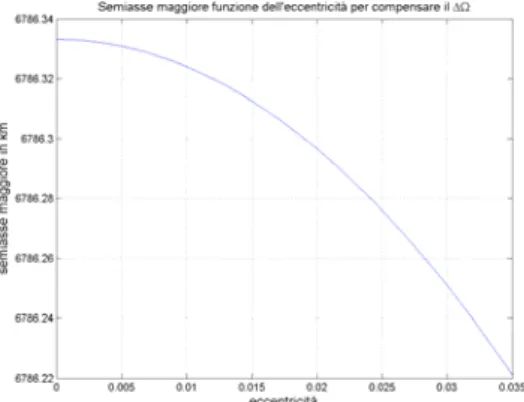
figura 4.3.1 Semiasse maggiore funzione dell’eccentricità per compensare ∆Ω...62
figura 4.3.2 Quote di perigeo e di apogeo tra orbita circolare e ad eccentricità massima ...62
figura 4.3.3 ∆V per missione di 8 anni e deorbitamento con ∆a = 50 km...62
figura 4.3.4 Mp/Mi per creare l’opportuno ∆V...62
figura 4.3.5 Semiasse maggiore funzione dell’eccentricità per compensare ∆Ω...63
figura 4.3.6 Quote di perigeo e di apogeo tra orbita circolare e ad eccentricità massima ...63
figura 4.3.7 ∆V per missione di 8 anni e deorbitamento con ∆a = 50 km...63
figura 4.3.8 Mp/Mi per creare l’opportuno ∆V...63
figura 4.3.9 Orbita ad inclinazione 46° ...65
figura 4.3.10 Orbita ad inclinazione critica con ω=90°...65
figura 4.3.11 Orbita ad inclinazione critica con ω ≈ 43° ...66
figura 4.3.12 Satelliti in orbita a 46° di inclinazione su un unico piano a 120°...67
figura 4.3.13 Satelliti in orbita a 46° di inclinazione su 3 piani equispaziati RAAN...67
figura 4.3.14 Satelliti in orbita ad inclinazione critica e ω=90° spaziati di 40° su unico piano...67
figura 4.3.15 Satelliti in orbita ad inclinazione critica e ω=90° su 3 piani a -110°, 0° e +150° RAAN ...67
figura 4.3.16 Satelliti in orbita ad inclinazione critica e ω=43° su 3 piani a -110°, 0° e +150° RAAN ...68
figura 4.3.17 Satelliti in orbita ad inclinazione critica e ω=43° su 3 piani a -110°, 0° e +150° RAAN ...68
figura 4.4.1 Andamento della densità al variare della quota...70
figura 5.2.1 Distinzione tra i vari tipi di carico pagante ...75
figura 5.3.1 Distinzione tra i vari sensori per Osservazione della Terra ...76
figura 5.3.2 Misurazione del campo gravitazionale effettuata dallo strumento LAGEOS...78
figura 5.3.3 Immagine ottenuta dal TRMM...79
figura 5.3.4 Immagine inviata dal RadarSat...80
figura 5.3.5 Zona fotografata con un normale radar (sinistra) e dal MISR un radar multidirezionale (destra)...80
figura 5.3.6 Osservazione eseguita dall’ERS...81
figura 5.3.7 Fotografia di una zona di Parigi...82
figura 5.3.9 Immagine inviata dall’OSMI ... 83
figura 5.3.10 Inquinamento rilevato dal MOPITT ... 84
figura 5.3.11 Immagine ottenuta dalle rilevazioni effettuate dall’ERBE tra il 1985 ed il 1989... 84
figura 5.4.1 Schema di funzionamento di un sensore passivo ... 85
figura 5.4.2 Modi di acquisizione di un sensore passivo... 86
figura 5.4.3 Esempi di diverse configurazioni ottiche... 87
figura 5.4.4... 88
figura 5.4.5... 88
figura 5.5.1 Spettro d’onda della radiazione elettromagnetica ... 89
figura 5.5.2 Legge di Plank e di Wien... 90
figura 5.5.3 Spettro d’assorbimento dell’atmosfera... 91
figura 5.5.4 Schema del processo di acquisizione dell’immagine... 92
figura 5.5.5 Spettro d’assorbimento per i minerali... 92
figura 5.5.6 Spettro d’assorbimento per le piante... 93
figura 5.5.7 Geometria del problema... 93
figura 5.5.8 Andamento degli angoli di elevazione e apertura a terra in funzione dell’angolo di vista del sensore... 94
figura 5.5.9 Andamento della distanza massima e della dimensione dell’area scandita in funzione dell’angolo di vista del sensore... 95
figura 5.5.10 Parametri di vista del sensore ... 97
figura 5.5.11 Risoluzioni ottenibili in funzione del diametro focale ... 99
figura 5.5.12 Andamento delle grandezze caratteristiche del sensore in funzione del diametro focale ... 100
figura 5.5.13 Caratterizzazione dell’area scandita... 101
figura 5.5.14 Capacità di acquisizione in funzione del diametro focale ... 102
figura 5.5.15 Metodo di acquisizione... 103
figura 5.5.16 Risultati ottenuti nel campo del visibile... 106
figura 5.5.17 Risultati ottenuti nel campo NMIR. ... 106
figura 5.5.18 Risultati ottenuti nel campo TIR. ... 107
figura 5.6.1 CHRIS... 109
figura 5.6.2 HYPSEO ... 110
figura 5.6.3 CIM 01... 110
figura 5.7.1 Errori di posizionamento del satellite ... 112
figura 5.7.2 Bilancio di errore nel posizionamento ... 114
figura 5.7.3 Preventivo di errore nell’assetto ... 114
figura 6.2.1 Architettura Geostazionaria ... 117
figura 6.2.2 Architettura Conserva ed Invia ... 118
figura 6.3.1 Quantità di dati inviabile a terra... 120
figura 6.4.1 Schema di un tipico apparato per telecomunicazioni... 122
figura 6.4.2 Schemi di modulazione del segnale ... 125
figura 6.4.3 diametro dell’antenna trasmittente in funzione della configurazione ... 127
figura 6.4.4 Angolo di vista dell’antenna trasmittente in funzione della configurazione... 127
figura 6.5.1 Alcatel APM... 130
figura 6.5.2 Interfaccia dell’ APM ... 130
figura 6.5.3 TRASPONDER ALCATEL TRC S-Band... 131
figura 7.2.1 Schema di un propulsore ad effetto Hall ... 137
figura 7.2.2 Propulsore SPT, Keldish RC KM-37 ... 138
figura 7.2.3 Propulsore TAL, TsNIIMASH D-100 ... 138
figura 7.2.4 Tempo di accensione del propulsore per effettuare la correzione di quota ... 143
figura 8.2.1 Stati tipici di lavoro di un calcolatore di bordo ... 146
figura 8.2.2 Schema di una tipica architettura centralizzata ... 146
figura 8.2.3 Schema di una tipica architettura ad anello... 147
figura 8.2.4 Schema di una tipica architettura distribuita ... 147
figura 8.2.5 Architettura dell’elettronica di gestione dati... 148
figura 8.3.1 EROS Memory Board (In via di sviluppo)... 148
figura 8.3.4 CRISA Data Processing Electronics ...150
figura 8.3.5 OHB Sytstems...151
figura 9.3.1 Assi principali d’inerzia ...155
figura 9.5.1 Smart Sun Sensor...159
figura 9.5.2 A-STR ...160
figura 9.5.3 STD 16...161
figura 9.5.4 TAM-2 ...161
figura 9.5.5 HR 0610...163
figura 9.5.6 MT80-1 ...164
figura 9.6.1 Schema dell’ADCS ...165
figura 10.2.1 Sistemi di riferimento utili al calcolo delle eclissi...169
figura 10.2.2 Schema condizioni illuminazione ...171
figura 10.4.1 Grafico I,P-V tipico per una cella al Si...174
figura 10.4.2 Schema costruttivo cella TJ...175
figura 10.4.3 Caratteristica I-V tipica cella TJ...175
figura 10.6.1 Funzionamento cella Li-Ion ...183
figura 10.8.1 Configurazione pannelli solari numero 1...187
figura 10.8.2 Analisi dei tempi d’eclisse per il satellite ...188
figura 10.8.3 Angolo di vista del Sole medio giornaliero per pannello con γ = 90°...188
figura 10.8.4 Configurazione dotata di meccanismi di movimento del pannello...189
figura 10.8.5 Tempo al Sole per la configurazione mobile del pannello ...190
figura 10.8.6 Configurazione finale 1 ...191
figura 10.8.7 Configurazione finale 2 ...191
figura 10.8.8 Coppie agenti sul satellite per le due configurazioni ...193
figura 10.8.9 Angolo di elevazione. ...195
figura 10.8.10 Tempo al Sole ...195
figura 10.8.11 Potenza del pannello. ...196
figura 10.8.12 Schema elettrico del generatore di Potenza ...196
figura 12.2.1 PSD per VEGA ...206
figura 12.4.1 VEGA...208
figura 12.4.2 Grafico delle prestazioni ...209
figura 12.4.3 Tabella delle prestazioni per orbite circolari...210
figura 12.4.4 Tabella delle prestazioni per orbite ellittiche LEO ...210
figura 12.4.5 Tabella delle prestazioni per orbite ellittiche MEO ...210
figura 12.4.6 Inviluppo statico - dinamico...211
figura 12.5.1 Struttura superiore ...213
figura 12.5.2 Sistema di coordinate ...214
figura 12.5.3 Sezione trasversale del corrente...215
figura 12.5.4 Schema di un cilindro con una massa concentrata all’estremità ...216
figura 12.5.5 Ingombri del corpo inferiore ...217
figura 12.5.6 Corpo superiore ...218
figura 12.5.7 Dettaglio dell’apparato di propulsione...218
figura 12.5.8 Ingombri del corpo superiore...220
figura 12.5.9 Configurazione generale del satellite visto inferiormente...221
figura 12.5.10 Configurazione generale del satellite visto superiormente ...222
figura 12.5.11 Satellite durante la fase di lancio ...223
figura 13.2.1 Ambiente termico tipico per un satellite in orbita LEO...227
figura 13.3.1Schema termico del satellite utilizzando l’analogia elettrica...230
figura 13.3.2 Condizioni di illuminazione del satellite ...234
INDICE DELLE TABELLE
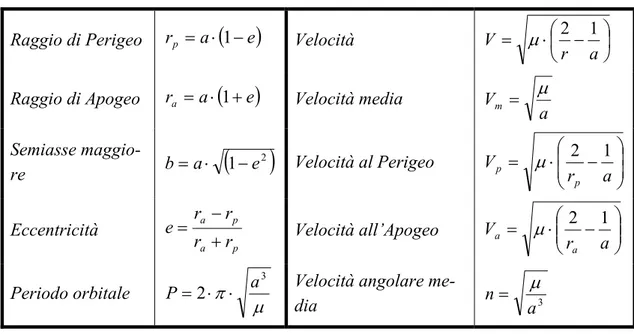
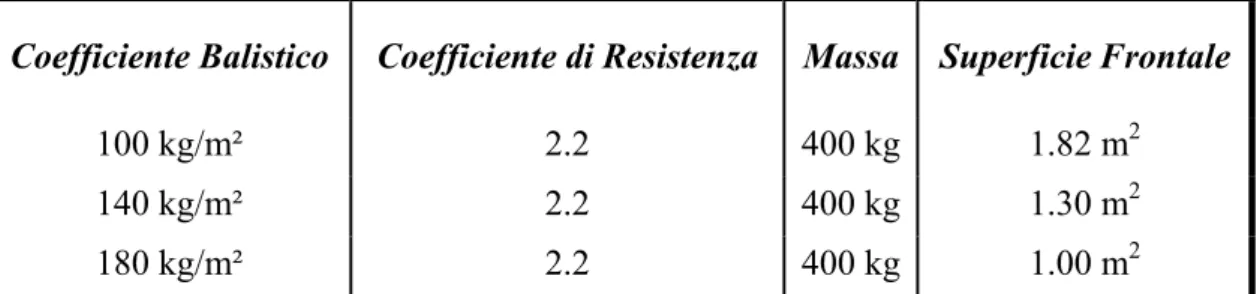
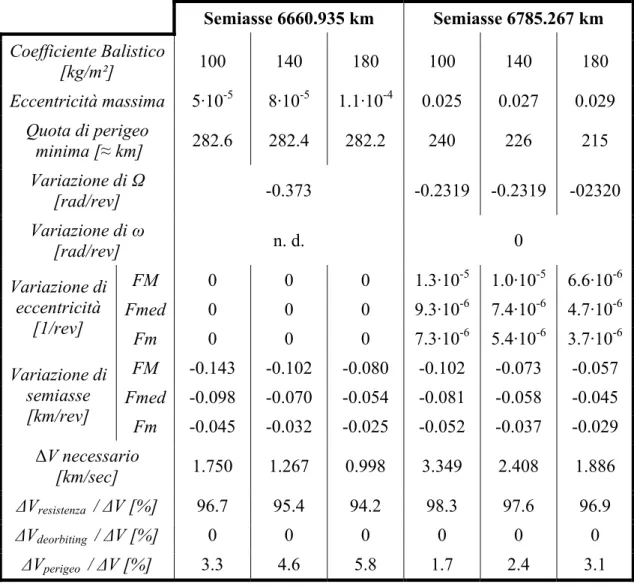
tabella 2.3-1 Requisiti tecnici del carico pagante _______________________________________ 31 tabella 3.2-1 Alcune proprietà ed equazioni di uso comune per orbite ellittiche. _______________ 38 tabella 3.3-1 Principali perturbazioni prodotte su un GEOs da altri corpi celesti.______________ 45 tabella 4.2-1 Legame Coefficiente balistico – superficie frontale data la massa e il coefficiente di resistenza ______________________________________________________________________ 59 tabella 4.3-1 Influenza del coefficiente balistico sulle grandezze notevoli per un impulso specifico di 1500 sec._______________________________________________________________________ 64 tabella 4.3-2 Copertura percentuale massima e totale per le diverse orbite ed i diversi tipi dicostellazioni. ___________________________________________________________________ 68 tabella 4.4-1 Resistenza massima minima e mediata su un’orbita per le diverse orbite analizzate__ 71 tabella 4.5-1 Pro e contro delle scelte effettuate ________________________________________ 73 tabella 5.5-1 Angolo di vista scelto __________________________________________________ 95 tabella 5.5-2 Strumentazione di riferimento____________________________________________ 99 tabella 5.5-3 Dati su alcuni rivelatori nel campo del visibile attualmente in commercio ________ 104 tabella 5.5-4 Dati su alcuni rilevatori per l’infrarosso attualmente in commercio _____________ 105 tabella 5.6-1 Ottica del sistema ____________________________________________________ 108 tabella 5.6-2 Elettronica del sistema ________________________________________________ 108 tabella 5.7-1 Relazioni per la determinazione degli errori di posizionamento e assetto _________ 113 tabella 5.7-2 Pro e contro della configurazione adottata ________________________________ 115 tabella 6.3-1 Tempi di accesso del satellite a terra _____________________________________ 120 tabella 6.4-1 Requisiti del sistema di comunicazione____________________________________ 122 tabella 6.4-2 Algoritmi di codifica/decodifica del segnale________________________________ 126 tabella 6.4-3 Risultati ottenuti per le varie configurazioni _______________________________ 128 tabella 6.4-4 Risultati ottenuti con software STK ______________________________________ 129 tabella 6.5-1 Bilancio di massa e potenza per il sistema di comunicazione __________________ 131 tabella 6.5-2 Pro e contro della configurazione adottata ________________________________ 132 tabella 7.2-1 Tabella comparativa dei vari tipi di propulsore _____________________________ 136 tabella 7.2-2 Caratteristiche del propulsore Keldish RC KM-37___________________________ 139 tabella 7.2-3 Tempi di accensione del propulsore ______________________________________ 142 tabella 7.3-1 Riassunto risultati componenti sistema propulsivo___________________________ 144 tabella 7.3-2 Vantaggi e Svantaggi delle soluzioni scelte ________________________________ 144 tabella 8.3-1 Pro e contro della configurazione adottata ________________________________ 151 tabella 9.2-1 Tipi di controllo d’assetto e problematiche ad essi correlate___________________ 154 tabella 9.5-1 Massime coppie esterne _______________________________________________ 159 tabella 9.5-2 Tempi di manovra per i torsori magnetici _________________________________ 164 tabella 9.6-1 Pro e contro delle soluzioni adottate _____________________________________ 165 tabella 10.1-1 Comparazione tra le sorgenti di potenza elettrica più comuni. ________________ 168 tabella 10.4-1 Comparazione tra diversi tipi di cella solare fotovoltaica ____________________ 176 tabella 10.4-2 Elementi della degradazione inerente del pannello solare ____________________ 176 tabella 10.4-3 Caratteristiche della cella a giunzione tripla ______________________________ 177 tabella 10.5-1 Potenze assorbite dai vari sottosistemi in varie condizioni. ___________________ 179 tabella 10.6-1 Dati batterie Li-Ion da [22] ___________________________________________ 183 tabella 10.8-1 Coppie di disturbo prodotte dalle due configurazioni. _______________________ 193 tabella 10.9-1 Caratteristiche principali dei meccanismi di dispiegamento. (Dati Alcatel) ______ 197 tabella 10.9-2 Grandezze caratteristiche del sistema di Potenza___________________________ 198 tabella 10.9-3 Pro e contro della scelta effettuata ______________________________________ 199 tabella 11.2-1 Prestazioni di GALILEO______________________________________________ 203 tabella 11.2-2 Pro e contro della configurazione adottata _______________________________ 203 tabella 12.2-1 Fonti tipiche di requisiti strutturali _____________________________________ 205 tabella 12.4-1 Fattori di carico del VEGA____________________________________________ 211 tabella 12.5-1 Carichi agenti sul corpo inferiore ______________________________________ 215
tabella 12.5-3 Carichi agenti sul corpo superiore ______________________________________ 219 tabella 12.5-4 Risultati ottenuti per i correnti del corpo superiore _________________________ 219 tabella 12.5-5 Carichi agenti sul corpo centrale _______________________________________ 220 tabella 12.5-6 Risultati ottenuti per i correnti del corpo superiore _________________________ 220 tabella 12.5-7 Pro e contro della configurazione adottata ________________________________ 224 tabella 13.2-1 Temperature operative tipiche per alcuni componenti del satellite. _____________ 226 tabella 13.3-1 Potenze dissipate all’interno dei vari componenti. __________________________ 232 tabella 13.3-2 Risultati analisi termica_______________________________________________ 237 tabella 14.2-1 Bilancio di massa e potenza carico pagante _______________________________ 243 tabella 14.2-2 Bilancio di massa e potenza sistema di propulsione _________________________ 243 tabella 14.2-3 Bilancio di massa e potenza sistema di controllo d’assetto____________________ 244 tabella 14.2-4 Bilancio di massa e potenza sistema di comunicazione_______________________ 244 tabella 14.2-5 Bilancio di massa e potenza sistema di gestione dati e comandi________________ 245 tabella 14.2-6 Bilancio di massa e potenza sistema termico_______________________________ 245 tabella 14.2-7 Bilancio di massa e potenza sistema di generazione di potenza ________________ 245 tabella 14.2-8 Bilancio di massa e potenza strutture e meccanismi _________________________ 245 tabella 14.2-9 Bilancio di massa e potenza della piattaforma satellitare_____________________ 246
1
1
Motivazioni ed obbiettivi della tesi
1.1 Introduzione
Lo studio effettuato negli ultimi cinquant’anni sulla propulsione elettrica, la maturazione avvenuta negli ultimi anni di e la costante ricerca per l’innovazione tale tecnologia hanno rivoluzionato il concetto di missione spaziale e ha cambiato la filo-sofia di progetto dei satelliti. Infatti, grazie al un minore consumo di propellente ri-spetto alla propulsione chimica, dovuto a un impulso specifico molto superiore, si può arrivare a sensibili riduzioni di massa di propellente e di conseguenza comples-siva o, guardando la questione da un altro punto di vista, ciò permette la possibilità di aumentare il carico utile.
D’altra parte la propulsione elettrica può, dato l’ampio ventaglio di spinte tra cui il progettista può scegliere, dai limiti del µN fino a centinaia di mN, adattarsi ad una grande varietà di missioni. Fino ad ora l’utilizzo di questo tipo di apparati era li-mitato a missioni quali il North-South Station keeping, mantenimento della stazione
in direzione Nord-Sud, per satelliti in orbita Geostazionaria, satelliti in cui la potenza
prodotta è comunque enorme e la richiesta di spinta molto bassa, e praticamente ine-sistente nella regione delle orbite LEO (Low Earth Orbit, Orbita Terrestre Bassa); data la necessità di un utilizzo troppo ripetuto ed un elevato consumo di potenza elet-trica ad essi veniva preferito l’utilizzo della propulsione chimica. L’aumento dei ren-dimenti registrato in questi ultimi anni, accoppiato alla diminuzione di potenza elet-trica necessaria ed ad un elevato impulso specifico rendono, al giorno d’oggi, questi propulsori interessanti anche per missioni a bassa quota.
Ultima considerazione riguarda i lanciatori presenti sul mercato. Numerosi sono i vettori che si propongono di mandare carichi utili più o meno pesanti in vari livelli di orbite con costi più o meno contenuti. A livello Europeo la famiglia più fa-mosa è sicuramente quella di Ariane. Lanciatore pensato per spedire carichi princi-palmente in orbita geostazionaria per cui molto grande e costoso, non indicato per l’immissione di veicoli spaziali in orbite LEO, se non come carichi secondari, di di
dimensioni molto ridotte, imbarcati nello spazio lasciato libero da più grandi carichi principali.
E’ dalla necessità di un lanciatore che immetta piccoli carichi paganti, tra i 300 ed i 200 kg, principalmente per ragioni scientifiche e di osservazione della Terra in orbite basse che in questi ulti anni è stato progettato il lanciatore VEGA. Lanciato-re che affronterà il primo volo nel 2006 e che si propone di inseriLanciato-re in orbita satelliti più facilmente, velocemente ed economicamente.
I costi sono stati mantenuti minimi dall’utilizzo di tecnologie a basso costo e dall’introduzione di una sinergia ottimizzata con le strutture utilizzate per i lanciatori Ariane. Vega è stato disegnato come un lanciatore singolo a tre stadi e, a differenza di molti altri piccoli lanciatori, sarà in grado di piazzare in orbita carichi multipli. Ul-teriore spinta all’utilizzo di questa soluzione, per il mercato spaziale italiano, è poli-tica, in quanto l’appaltatore principale del programma è l’Italia, tramite ASI (Agen-zia Spa(Agen-ziale Italiana) e FIAT Avio, con una partecipazione del 65%.
In questa tesi si è cercato di utilizzare le precedenti analisi sul panorama del mercato spaziale del giorno d’oggi per arrivare ad un progetto preliminare di una missione satellitare che possa essere di particolare interesse.
Il procedimento di lavoro che è stato seguito è rappresentato schematicamente in figura 1.1.1.
figura 1.1.1 Schema del lavoro svolto
Nei primi due capitoli vengono analizzati gli obiettivi della tesi, presentando-ne il contesto e le motivazioni principali, ed i requisiti sulla missiopresentando-ne che se presentando-ne deri-vano. Il terzo fornisce una breve descrizione sui principi base dell’Astrodinamica u-sata nell’analisi orbitale condotta nel capitolo quarto. Successivamente, avendo de-terminato un orbita ben definita, si passa ad una valutazione delle caratteristiche principali dei vari sottosistemi. I risultati quindi ottenuti vanno a confluire nel capito-lo finale dove viene esposta la descrizione generale del satellite ottenuto, le conclu-sioni finali e le eventuali considerazioni sugli sviluppi futuri.
Requisiti di missione
Analisi e scelta
dell’orbita Analisi dei sottosistemi Definizione configurazione
Budget configurazione
1.2 Cenni storici sull’osservazione della terra
L’osservazione della terra appare già durante la Seconda Guerra Mondiale in quelle che erano operazioni di ricognizione tattica e sorveglianza. Anche durante la guerra in Vietnam venne utilizzato con successo il CIR (Color Infrared) per distin-guere edifici militari mimetizzati tra la vegetazione. Da queste prime applicazioni si è subito dedotto che le potenzialità dei sistemi utilizzati potevano essere notevolmen-te miglioranotevolmen-te se si fosse passato ad un uso più ampio dello spettro della radiazione e-lettromagnetica.
Agli inizi la disponibilità di calcolatori in grado di elaborare i dati ottenuti era molto scarsa per cui si preferiva utilizzare pellicole fotografiche che venivano recu-perate, e quindi analizzate, solo quando il satellite veniva riportato a Terra. Nei pri-mi anni ’70 appare un sensore che utilizza quattro bande di acquisizione immagini, il
Multispectral Scanner (MSS), o scanditore multispettrale, che viene usato a bordo
dell’Earth Resources Technology Satellite-A (ERTS-A) ribattezzato poi Landsat 1 dalla NASA, il primo satellite ad usare un sensore multispettrali; questo fu il primo di una serie di satelliti destinati all’osservazione globale della Terra eseguite ad in-tervalli di tempo. Questo sensore era in grado di coprire tre regioni (blu, verde ed una che comprendeva rosso e vicino infrarosso); i più moderni sensori iperspettrali ope-rano, invece, su tutta la banda compresa tra l’ultravioletto e l’estremo infrarosso. Il Landsat 1 fu lanciato nel luglio del 1972 e terminò le sue operazioni nel gennaio del 1978: Il secondo della serie fu lanciato nel gennaio del 1975. Altri 4 versioni del sa-tellite Landsat furono lanciati tra il 1978 ed 1999 (Landsat 3, 4, 5, e 7 rispettivamen-te). Il Landsat 5 è andato oltre i suoi limiti di vita riuscendo a coprire, in parte, la perdita del Landsat 6 che fallì l’acquisizione dell’orbita nell’ottobre del 1993. L’ultima versione, ancora operativa, il Landsat 7, fu lanciato nell’aprile del 1999. Nel Landsat 7 appaiono sostanziali miglioramenti grazie dell’ Enhanced Thematic
Mapper Plus (ETM+) che produce dati su sei bande spettrali, con una risoluzione di
circa 28 metri, dati nel pancromatico, con una risoluzione di circa 15 metri, e dati nel lontano infrarosso, ad una risoluzione pari a 60 metri. La NASA gestì le operazioni dei Landsat nei primi anni ’80 mentre a partire dal 1985 il sistema viene commercia-lizzato e l’utilizzo viene passato a Earth Observation Satellite Company (EOSAT). Nel campo Europeo il primo satellite di un certo rilievo nel campo dell’osservazione della Terra fu il Francese SPOT (Satellite Pour L’Observation de la Terre). Lo SPOT porta a bordo due sensori, gli High Resoluttion Visible (HRV), che permettono di operare su tre bande spettrali (verde, blu ed una che comprende rosso e vicino in-frarosso) od in pancromatico. SPOT 4 è l’ultimo satellite della serie in cui è stata
ag-giunta un ulteriore banda di acquisizione che permette di avere risoluzioni di circa 20 metri nell’infrarosso e 10 metri in pancromatico. I sensori dello SPOT sono capaci di scandire 27° a partire dalla direzione del Nadir permettendo quindi una ripetizione temporale di acquisizione su una particolare località tra i due ed i ventisei giorni a seconda della zona osservata.
A partire dalla metà degli anni ottanta partono anche in India alcuni progetti per lo sviluppo di piattaforme per osservazione terrestre che conducono al lancio, nel 1988, dell’ Indian Remote Sensing Satellite (IRS). L’IRS-1A fu lanciato nel 1988, che fu seguito, nel 1991, da un secondo identico satellite l’ IRS-1B. Entrambi i satel-lite montano dei sensori che offrono prestazioni paragonabili a quelle della serie Landsat. Nel dicembre del 1995, fu lanciato l’ IRS-1C, con notevoli migliorie nelle prestazioni che portarono ad eseguire acquisizioni in pancromatico a risoluzioni di circa 5. Nel settembre del 1997 fu lanciato l’IRS-1D che rappresenta oggigiorno il sistema di punta dell’industria aerospaziale Indiana.
Nel 1995 fu lanciato anche il RADARSAT da parte del Canada che è stato il primo sistema equipaggiato con un avanzato Synthetic Aperture Radar (SAR).
Il primo sistema interamente Europeo, l’ERS-1, fu lanciato nel luglio del 1991, subito seguito dall’ ERS-2 nell’aprile del 1995. L’ ERS imbarca come carico pagante un SAR a microonde il cui utilizzo è prevalentemente volto all’analisi dello stato dei bacini marini e dei ghiacciai.
1.3 Stato attuale e tendenza della tecnologia spaziale.
Sin dagli albori dell’attività spaziale è stata manifestata una certa tendenza al-la progettazione e alal-la costruzione di satelliti sempre più grandi e complessi, concet-tualmente e tecnologicamente. Le principali cause di questa tendenza sono da ricer-care in:
• tendenza a realizzare progetti sempre più ambiziosi con cui aumenta-vano proporzionalmente le dimensioni dei satelliti;
• costruzione di lanciatori sempre più potenti, in grado quindi di portare in orbita oggetti sempre più voluminosi e pesanti;
• grossi investimenti da parte di enti governativi o privati in programmi di ricerca spaziale, soprattutto per ragioni politiche o militari.
Nei primi anni ’90, però, le mutate condizioni politiche dovute alla fine della Guerra Fredda, hanno portato a sostanziali tagli nella spesa spaziali, soprattutto da parte di quello che era stato fin a quel momento il maggior investitore in campo
mondiale, la NASA, creandosi in seguito un effetto domino che ha portato ad un ri-dimensionamento dei programmi della maggior parte delle agenzie spaziali interna-zionali, seguendo le direttive impartite da Dan Golden (il nuovo amministratore capo della NASA) che potevano essere riassunte nel motto “più velocemente, meglio ,e più sicuramente”. I nuovi programmi, dopo iniziali difficoltà, cominciarono a dare i loro frutti e aprirono nuovi scenari per la ricerca spaziale soprattutto nello sviluppo dei cosiddetti small satellites1.
Da questo momento in poi appaiono due tendenze parallele: per quanto ri-guarda i satelliti commerciali a crescere sempre di più; per ciò che concerne gli altri satelliti a diminuire in dimensioni come si può evincere dalla figura 1.3.1 e dalla figura 1.3.2
figura 1.3.1 Tendenza per i satelliti commerciali
1 Molti termini sono stati usati per descrivere le varie classi di satelliti, ma la classificazione più
adot-tata consiste nel distinguerli per quanto riguarda la loro massa. Il termine small satellites, piccoli satel-liti, copre tutti i satelliti con massa complessiva inferiore a 500 kg. Possono a loro volta essere distinti in mini satelliti quando la massa è compresa tra i 100 e i 500 kg, in micro satelliti quando è compresa tra 10 e i 100 kg, nano satelliti tra 1 e 10 kg, i pico satelliti tra 0.1 e 1 kg e infine femto satelliti con
figura 1.3.2 Tendenza per i veicoli spaziali non pilotati della NASA
Mentre i satellite per le telecomunicazioni sono praticamente obbligati a cre-scere, per gli altri satelliti si è aperta quindi un alternativa di sviluppo chiamata “bas-so costo/bas“bas-so rischio” che consiste nel rimpiazzare i satelliti più grandi e complessi con un numero maggiore di satelliti più piccoli ma più sicuri, riducendo così i rischi economici. La realizzazione di satelliti più piccoli, dotati quindi di minore strumen-tazione e vita utile più breve, ha portato allo sviluppo e all’implemenstrumen-tazione di reti multisatellitari in cui ogni elemento è importante ma non indispensabile agli scopi della missione; ciò vuol dire che, in caso di malfunzionamento di uno dei satelliti, quest’ultimo può essere rimpiazzato da un altro membro della costellazione o even-tualmente da un satellite appositamente lanciato. Di conseguenza, quella che a prima impressione, sembrava una soluzione antieconomica, dividere un grosso satellite in numerosi piccoli lanciati in gruppi, si è trasformata in un punto di forza in quanto si deve notare che una fetta abbastanza consistente dei costi di una missione (tradizio-nalmente intorno al 15-20% del costo totale) è dovuta alle assicurazioni che vengono stipulate per ogni missione, che grazie a questa soluzione, dato che diminuiscono i rischi, si riducono sensibilmente.
Questa filosofia di progettazione viene accompagnata dalla richiesta che la piattaforma sia multimissione, ovvero dove ogni satellite venga progettato per la più ampia gamma di missioni possibili. Ciò comporta che, invece di progettare il miglior satellite per una determinata missione, si scelga una versione non propriamente otti-mizzata, ma dotata di più funzionalità.
Tutte queste riduzioni nei costi hanno portato, quindi, a nuove opportunità di mercato, ad un incremento sostanziale del bacino di potenziali acquirenti del prodot-to finale e ad un incremenprodot-to delle società interessate nella progettazione di mini sa-telliti. Ciò ha causato una specie di globalizzazione spaziale grazie al quale enti mol-to diversi tra loro, come università e società private, appartenenti a realtà politiche molto diverse tra loro, possono collaborare economicamente e scientificamente nella ricerca spaziale2.
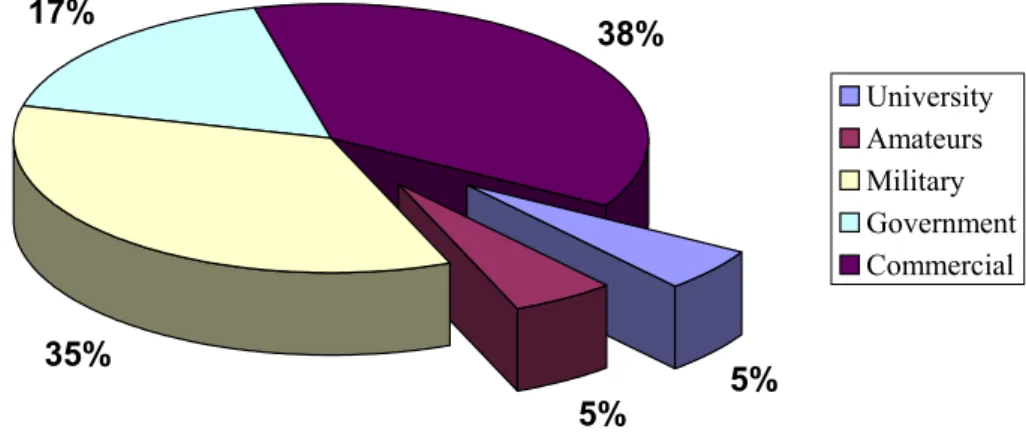
Il grafico in figura 1.3.3, basato su dati presi tra gli anni 1980 e 1999, mostra la distribuzione percentuale dei clienti interessati ai programmi spaziali; è interessan-te notare la fetta del 10% costituita dalle università, percentuale che continua a cre-scere. 5% 5% 35% 38% 17% University Amateurs Military Government Commercial
figura 1.3.3 Principali clienti delle missioni spaziali
Al momento, l’espansione dei minisatelliti è collegata alla capacità di lancio dei moderni razzi-vettori, intesa soprattutto come capacità di sfruttare il lancio di grossi satelliti convenzionali. I limiti maggiori sono imposti dalla scarsità di lanciato-ri dedicati, a basso costo, e dall’intlanciato-rinseca difficoltà di implementare a bordo le po-tenze richieste dai vari sottosistemi, che risultano essere ancora troppo esose.
Lo stato attuale della ricerca tecnologica attraverso lo sviluppo di nuovi lan-ciatori medio piccoli, come l’ Europeo VEGA, delle nanotecnologie, di strutture multifunzionali (MFS), di sistemi microelettromeccanici (MEMS), sembrano dare nuovo impulso alla presentazione di nuovi progetti nel breve periodo.
2 Come esempio si può prendere la Disaster Monitoring Constellation (DMC) che consiste in una
piattaforma multisatellite, costituita da cinque satellite pesanti circa 100 kg, che verrà realizzata e sfruttata da cinque paesi: Algeria, Gran Bretagna, Cina, Nigeria e Tailandia. Da questa configurazio-ne, il cui costo stimato è di circa 56 milioni di dollari ci si aspettano prestazioni paragonabili a quelle di un satellite singolo dal costo di 300 milioni di dollari.
1.4 Breve storia e tendenza attuale della propulsione elettrica
L’anno 1903 può essere assunto come punto iniziale della moderna astronau-tica e missilisastronau-tica, proprio quando Konstantin Eduardovich Tsiolkovsky pubblicò l’articolo “Investigation of Universal Space by means of Reactive Devices” dando così un nuovo punto di riferimento nell’astronautica moderna.
Nel suddetto articolo venivano presentate le leggi matematiche fondamentali, inclusa la ben nota formula di Tsiolkovsky, grazie alle quali si poteva evincere la grossa dipendenza delle prestazioni missilistiche dalla velocità di espulsione del pro-pellente; infatti fu stabilito rigorosamente che, a parità di carico utile a bordo, la mas-sa totale del sistema poteva essere aumentata arbitrariamente se, contemporaneamen-te, veniva aumentata la velocità di scarico. Precisamente otto anni dopo, nel 1911, sempre Tsiolkovsky introdusse il concetto di propulsione elettrica (EP) per risponde-re alle richieste di velocità di scarico semprisponde-re più elevate. Partirono così le prime ana-lisi teoriche e sviluppi del problema, ma solo nel 1917 si arrivò al brevetto di un pri-mo acceleratore di ioni per la propulsione grazie a Robert Hutching Goddard (figura 1.4.1). Contributi importanti arrivarono anche da parte di Yuri V. Kondratyuk, che per primo mise in relazione l’affinità tra la EP e la capacità di generare potenza tra-mite la radiazione solare, e Hermann Julius Oberth. Dopo una prima fase, caratteriz-zata da ricerche teoriche perlopiù condotte a livello personale lo sviluppo della pro-pulsione elettrica subì un grosso rallentamento nella prima metà del ‘900 tranne al-cuni casi sporadici, tra cui vale la pena ricordare lo sviluppo, da parte di Valentin Pe-trovich Glushko, per conto del programma spaziale Sovietico, di un modello di pro-pulsore elettrotermico realizzato con finalità esclusivamente spaziali. Esclusi quindi questi casi, la maggior parte degli studi condotti da Tsiolkovsky cadde nel dimentica-toio e tranne alcuni cultori del genere, come Oberth, che realizzò una vera e propria bibbia a riguardo, nessuno se ne interessò più. Infatti, all’inizio della conquista dello spazio, il problema maggiore non era quello di controllare il satellite nella sua orbita, ma piuttosto essere in grado di lanciarlo; per queste ragioni, e anche perché c’era scarso interesse da parte degli enti militari nello sviluppo di propulsori a bassa spinta, si favorì lo studio e lo sviluppo di razzi chimici. Inoltre, per la tecnologia di quel tempo, era molto difficile realizzare camere a vuoto con cui eseguire validi test sulla propulsione elettrica, al contrario di quanto accadeva con i razzi chimici che poteva-no essere testati nell’atmosfera ordinaria. A questo va aggiunto, infine, la scarsa ca-pacità di implementare le elevate potenze elettriche richieste dalle EP. Tutte queste problematiche furono già intese dallo stesso Tsiolkovsky che dicendo: “dovremo metter da parte questi sogni per un po’ ed occuparci dei più prosaici esplosivi”,
de-scrisse l’immaturità tecnologica di tali studi. D’altra parte questi sforzi personali, che si perdevano in quella che era realtà scientifica altamente frammentata tra i vari pae-si, erano orientati verso applicazioni, come i trasferimenti interplanetari, che erano aldilà di ogni reale fattibilità e molto lontane dalle necessità del momento; infatti si noti come non è presente in quegli anni nessuno studio volto ad utilizzare la EP per “normali” satelliti in orbita terrestre.
La maggior parte della ricerca, fino agli anni ’50, venne indirizzata a miglio-rare le prestazioni della propulsione chimica; nel 1957, in piena Guerra Fredda, l’Unione Sovietica mise in orbita il primo satellite artificiale, lo Sputnik 1, per cui gli Stati Uniti, sentendosi minacciati militarmente, decisero di ampliare i finanziamenti alla NASA per lo sviluppo del Progetto Corona. Il clima così instauratosi permise uno sviluppo molto rapido in molti campi scientifici, tra cui quelli strettamente ine-renti con la EP, come la fisica quantistica e l’elettronica. Tutto ciò condusse ad una ripresa degli studi sulla propulsione elettrica insieme con studi volti ad ottenere mag-giori potenze nello spazio.
A partire dagli anni ’60 fiorirono negli Stati Uniti studi e test sulla EP che conducono nel 1960 al programma SERT (Space Electric Rocket Test) per dimostra-re la fattibilità dei motori a ioni grazie al quale fu lanciato il SERT I, che fu il primo satellite ad usare una tale tecnologia, e più tardi, nel ’70, al lancio del SERT II che dimostrò la capacità di sopravvivenza del motore in orbita per circa 6 mesi.
Dall’altra parte del mondo nella metà degli anni ’70 , nell’ Unione Sovietica, partivano invece i primi studi sui propulsori ad effetto Hall e sui propulsori a plasma pulsante.
Tra la fine degli anni ’80 e l’inizio degli anni ’90 partirono, a seguito dello scioglimento dell’Unione Sovietica, le prime collaborazioni tra gli USA e la Russia, insieme al Giappone e all’Europa, che condussero la EP in una nuova era tecnologi-ca; nel 1994 fu lanciato il primo satellite commerciale che usava un sistema di pro-pulsore a ioni per le manovre di controllo orbitale. Il cambiamento epocale arrivò pe-rò il 24 ottobre 1998 quando fu lanciato dalla NASA il Deep Space 1, satellite dimo-stratore in cui vennero testati dodici nuovi componenti ad alto rischio, tra cui un si-stema propulsivo a ioni per l’intero controllo della missione.
A partire da questo punto in poi le maggiori agenzie spaziali cominciarono a sviluppare missioni completamente dotate di EP, come la NASA che sta tuttora prparando tre nuovi motori a ioni per la missione DAWN prevista per il 2006 per e-splorare Cerere e Vesta, due tra i più importanti asteroidi. Nel 2003 l’ESA sfruttò proprio i motori a ioni, denominati RIT-10 e T5, del suo satellite Artemis per permet-tere a quest’ultimo di raggiungere l’orbita nominale prevista, con un trasferimento di 18 mesi, che non era stata acquisita inizialmente per problemi seguiti al lancio. Il
27/28 settembre 2003 sempre l’ESA lanciò il satellite SMART 1, dotato di propulsori ad effetto Hall, destinato all’esplorazione della Luna.
L’ESA è tra l’altro molto attiva nello sviluppo dei propulsori FEEP (Field
Emission EP) in collaborazione con Alta/Centrospazio per la missione CNES. Da
parte del Giappone gli sforzi tecnologici sono sfociati nel lancio nel marzo del 2003 del satellite MUSES-C che cercherà di raggiungere un asteroide grazie al suo motore a ioni MECR (microwave electron cyclotron resonance).
In conclusione al giorno d’oggi la EP, soprannominata un tempo “il principe in attesa” ha cominciato a coprire un ruolo crescente e importante in tutte le numero-se iniziative spaziali.
figura 1.4.1 Un secolo di tecnologia
a sinistra: il primo schema di Goddard di un propulsore elettrostatico a destra: il motore FEEP sviluppato presso il CentroSpazio
1.5 Scopo della tesi
Partendo dalle considerazioni sin qui effettuate emerge che, fino ad ora, tran-ne alcutran-ne eccezioni, non è stata presa con sufficiente consideraziotran-ne la possibilità di accoppiare le funzionalità richieste dall’osservazione della terra con le potenzialità delle nuove filosofie microsatellitari. Se a ciò aggiungiamo che nel campo della pro-pulsione elettrica sono stati raggiunti sufficienti standard di prestazioni e di affidabi-lità provata, possiamo renderci conto come possa aprirsi un nuovo universo di mis-sioni spaziali costituite da mismis-sioni a bassa quota realizzate da satelliti relativamente piccoli.
E’ opportuno notare che le missioni per l’osservazione della terra preceden-temente descritte sono tutte missioni dove il satellite è posto in un orbita eliosincro-na; l’utilizzo di questo tipo di orbita porta numerosi vantaggi per quanto riguarda
l’operazione di acquisizione in quanto questa viene eseguita sempre alla stessa ora del giorno, e quindi con le medesime condizioni di illuminazione. D’altra parte però queste orbite sono caratterizzate dall’avere grosse inclinazioni (circa 90°) e quote di volo relativamente elevate (circa 600 km), ciò comporta che i satelliti sono pratica-mente in grado di “vedere” la quasi totalità della sfera terrestre, cosa che da una parte rende la missione globale più che locale, ma che dall’altra parte rende relativamente elevati i tempi intercorrenti tra un’osservazione e la successiva. Inoltre le elevate quote associate con le orbite eliosincrone comportano lanciatori di maggiori dimen-sioni e che imbarchino maggiori quantità di propellente, cosa che si traduce in costi maggiori dell’intera missione.
L’idea di base della presente tesi è quella di minimizzare i costi andando ad operare a quote più basse rimanendo però ad uno standard di prestazioni paragonabi-le a quello delparagonabi-le missioni esistenti. La scelta di non utilizzare orbite eliosincrone ren-de fattibile la realizzazione di missioni ren-dedicate a zone specifiche con tempi di rivisi-tazione molto minori; inoltre, sin da ora, possiamo ipotizzare che, realizzando una costellazione piuttosto che un singolo satellite, si può “emulare” la possibilità di ese-guire rilevazioni con le medesime condizioni di illuminazione.
Ma i vantaggi non sembrano finire qui in quanto è presumibile che i sistemi dedicati all’osservazione e alla comunicazione siano molto meno esosi in termini di potenza e massa, vista la minore distanza che li separa dalla terra, o da un altro punto di vista è possibile ottenere prestazioni sensibilmente migliori rispetto alle altre mis-sioni a parità di strumentazione imbarcata . Lo svantaggio delle orbite LEO sta nella maggiore resistenza aerodinamica che il satellite incontra lungo la sua orbita e nella minore capacità visiva dei sensori, intesa come capacità di osservazione di zone più o meno ampie del globo terrestre. Il primo problema può essere risolto grazie all’utilizzo della propulsione elettrica che ci permette di avere spinte propulsive dello stesso ordine di grandezza delle forze resistive incontrate, abbattendo le richieste di propellente da imbarcare rispetto ai propulsori di altra natura, cambiando al contem-po la filosofia di progetto del satellite in quanto generano spinta sfruttando contem-potenza elettrica piuttosto che quantità di propellente. Inoltre l’utilizzo di tali propulsori im-plica che le correzioni orbitali vengano eseguite con manovre dette a bassa spinta, le quali comportano l’accensione del sistema per lunghi periodi e, quindi, lunghi tratti dell’orbita, a differenza dei sistemi tradizionali con cui la manovra si avvicina molto di più ad uno sparo impulsivo, ciò comporta sostanzialmente un differente approccio analitico al problema del mantenimento orbitale.
Adottata quindi un’ orbita LEO, per quanto riguarda il secondo problema di cui si è appena discusso, si cercherà di dimostrare come l’abbattimento della quota operativa del satellite non vada ad abbattere in maniera significativa la capacità visi-va dei sensori
Il lavoro svolto nella presente tesi punta all’analisi ed al progetto preliminare di una soluzione alternativa al problema dell’osservazione della terra attraverso l’adozione di una filosofia di progetto nettamente diversa da quella tradizionale, cer-cando comunque di dimostrarne la fattibilità attraverso l’utilizzo di tecnologie dispo-nibili sul mercato.
Lo scopo principale non è, quindi, quello di realizzare un sistema che sia mi-gliore di quelli presenti sul mercato, ma piuttosto realizzarne uno alternativo, con prestazioni paragonabili agli altri e che presenti, però, dei costi totali di missione in-feriori, sempre tenendo ben presente che,in linea di massima, con un utilizzo di tec-nologie sufficientemente comuni, il costo della missione è direttamente proporziona-le alproporziona-le dimensioni del progetto, intese sia come dimensioni materiali del sistema sia come complessità dell’intero sistema.
Si possono riassumere gli scopi della presente tesi possono nei seguenti punti: • Valutare la possibilità di realizzare una missione multisatellitare a
bassa quota per massimizzarne le prestazioni in termini di qualità del prodotto finale (vedi capitolo 4 e 5).
• Studiare la possibilità di acquisire l’orbita LEO e di mantenerla utiliz-zando la propulsione elettrica,e definirne quindi i parametri orbitali (vedi capitolo 4 e 7).
• Analizzare la possibilità di usare il lanciatore VEGA e, nel caso si tratti di una costellazione, verificare se sia possibile eseguire un unico lancio per inserire l’intera piattaforma (vedi capitolo 4).
• Fornire in sintesi un budget di massa,dimensioni e potenza necessari per il satellite, da utilizzare per successive analisi della missione e per fasi progettuali più avanzate (capitolo finale).
2
2
REQUISITI DI SISTEMA
2.1 Introduzione
Questo capitolo descrive i requisiti di base a cui la missione deve soddisfare, partendo dai possibili usufruitori dei dati che possono venir acquisisti. Nel paragrafo 2.2 si da un indicazione di performance generali, dei clienti potenziali e del budget iniziale, mentre nel paragrafo 2.3 vengono presentati i requisiti tecnici primari. Tutti i seguenti requisiti devono intendersi come obbligatori da rispettare .
2.2 Requisiti di funzionalità
• La missione è destinata ad operazioni di osservazione della Terra eseguite sul territorio dell’Unione Europea, specificatamente sul bacino del Mediterraneo, presentata in figura 2.2.1, situata tra la penisola Iberica e la Grecia. L’area si riduce così ad essere un rettangolo delimitato dai punti posti tra le latitudini 30° N e 46° N, e le longitudini 10° W e 37° E.
• La missione può essere dotata di una certa flessibilità in maniera da operare anche in zone diverse da quella sopra indicata.
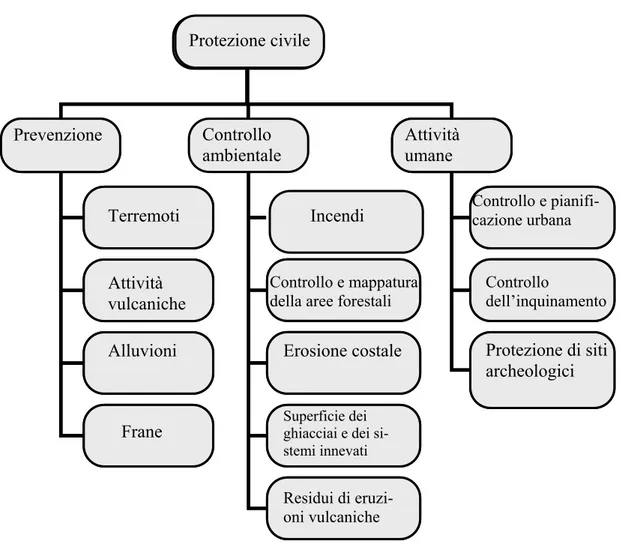
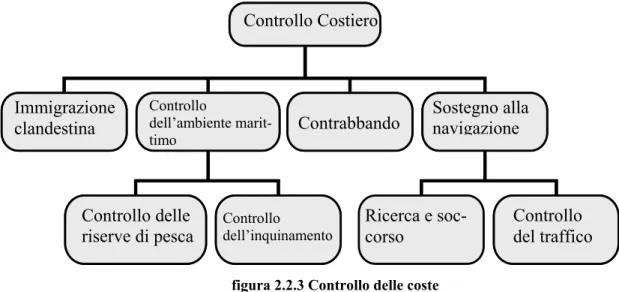
• Potenziali acquirenti sono stati individuati in Enti Nazionali ed Internazionali con scopi di protezione civile, controllo e monitoraggio delle coste e del terri-torio. Informazioni maggiori sulle richieste che possono essere fornite da questi enti sono indicate in figura 2.2.2 e figura 2.2.3
figura 2.2.1 Bacino del Mediterraneo.
figura 2.2.2 Protezione civile
Urban Control And Planning Pollution Control Protection of Archeology Emplacements Protezione civile Controllo ambientale Incendi Erosione costale Superficie dei ghiacciai e dei si-stemi innevati Prevenzione Terremoti Alluvioni Frane Residui di eruzi-oni vulcaniche Controllo dell’inquinamento Protezione di siti archeologici Attività umane Attività vulcaniche Controllo e mappatura della aree forestali
Controllo e pianifi-cazione urbana
figura 2.2.3 Controllo delle coste
• Altri potenziali acquirenti possono essere trovati nel campo commerciale, a-ziende per cui l’acquisizione cartografica è di interesse nell’ambito di studi geologici, dell’analisi e del controllo della produzione agricola e per studi ur-banistici; oppure della semplice vendita di fotografie.
figura 2.2.4 Attività commerciali
• La piattaforma deve utilizzare tecnologie Europee, può utilizzare tecnologie non Europee, ma queste non devono essere componenti critici, su cui viene basata la missione, e devono poter essere completamente realizzabili con co-noscenze tecnologiche e scientifiche da parte di aziende Europee.
• Il Budget iniziale della missione, comprensivo di lancio e sviluppo del seg-mento di terra, non deve superare i 100 milioni di Euro.
Commercial Activity Urbanism and planning Geology Agriculture Attività com-merciali Urbanistica Geologia Agricoltura Monitoraggio e
pianificazione Ricerca mineraria Controllo e piani-ficazione Coast Control
Illegal Imports Navigation Aids
Ricerca e
soc-corso and SurveillanceTraffic Control Maritime Ambient Illegal Immigration in restricted areas Water Pollution Control Controllo Costiero
Contrabbando Sostegno alla navigazione
Controllo dell’ambiente marit-timo Immigrazione clandestina Controllo delle
riserve di pesca Controllo dell’inquinamento
Controllo del traffico
2.3 Requisiti di missione
2.3.1 Generale
Il sistema mutisatellite per il controllo del globo terrestre si compone delle seguenti parti.
• Segmento di Terra: composto dalla stazione a terra che controlla l’evoluzione della missione, assumendo il sistema di telecomunicazione come appartenen-te al segmento spaziale.
• Segmento spaziale: composto da tre satelliti identici e intercambiabili, ognu-no dei quali può lavorare singolarmente, in maniera indipendente dagli altri due.
• Interfacce con il segmento di Terra, il segmento spaziale ed il lanciatore
Ve-ga
2.3.2 Vita utile
• Il sistema multisatellitare deve essere in grado di operare per un periodo non inferiore ai 5 anni.
2.3.3 Prodotto della missione
• Immagini multispettrali ad alta risoluzione in formato relativamente grezzo. Dev’essere compito del cliente finale, o del cliente intermedio, il trattamento e l’analisi dei dati.
2.3.4 Tempo di rivisitazione
• Ogni satellite della piattaforma deve essere in grado di fare acquisizione su un determinato punto della superficie terrestre ad intervalli massimi di 3 gior-ni.
2.3.5 Flessibilità
• L’intera piattaforma deve garantire la capacità di poter modificare, tempora-neamente o definitivamente, alcuni parametri di missione come il tempo di rivisitazione e la modalità di acquisizione.
2.3.6 Requisiti di comunicazione
• Il sistema di comunicazione deve essere in grado di eseguire l’invio e la rice-zione dei dati acquisiti, dei parametri di funzionamento e dei parametri orbi-tali. Deve esistere un canale di comunicazione utilizzabile in caso di guasto al sistema.
2.3.7 Requisiti sulla stazione a Terra.
• La stazione a terra deve essere in grado di comunicare con i satelliti e di ese-guire operazioni di controllo in tempo reale.
• La scelta per la banda utilizzata per le comunicazioni deve essere condotta tra le seguenti:
¾ Banda S ¾ Banda X
• La scelta della stazione a Terra deve essere effettuata tenendo presenti le se-guenti opzioni:
ο Progetto e costruzione di una singola stazione a Terra unicamente dedicata a questa piattaforma
ο Analizzare la possibilità di utilizzare costellazioni di satelliti come Arte-mis, di proprietà ESA, che funzionano da organi intermedi tra la stazione emittente e quella ricevente.
ο Usare stazioni ESA già presenti, se disponibili, o di qualsiasi altro Ente Eu-ropeo.
Sono qui di seguito listate alcune delle stazioni a Terra che possono essere u-tilizzate come supporto:
ο Kiruna, sita in Svezia, in grado di operare in banda S e X; è correntemente usata per i sistemi ENVISAT e EROS.
ο Redu, locata in Belgio, che usa le bande CL, S, Ku e Ka
ο Cebreros, che diventerà operativa in Spagna a partire dal 2005 e sarà asse-gnata come supporto per le missioni Mars-Express e per il satellite Rosetta. ο Villafranca del Castello, VILSPA (Villafranca Satellite Tracking Station,
Stazione di Controllo di Villafranca), che fornisce supporto per operazioni
di telemetria ,commando e tracciamento.
tutte facente parte del gruppo ESOC (European Space Operation Center,
Centro di Operazioni Spaziali Europeo).
2.3.8 Compatibilità con il lanciatore
• L’intera piattaforma deve essere lanciata attraverso il lanciatore europeo Ve-ga. Informazioni più dettagliate possono essere trovate in [10] e [11].
• Il volume disponibile (statico e dinamico) per i 3 satelliti è quello in figura 2.3.1 e figura 2.3.2, misurato in millimetri. Se il carico pagante adotta il si-stema di separazione fornito dal Vega o qualsiasi altro dei sistemi forniti
dall’autorità di lancio, la massa del carico pagante3 non include la massa degli elementi di separazione. Se,viceversa, il sistema dispone di un apposito si-stema quest’ultimo dovrà essere incluso nella massa del carico utile.
figura 2.3.1 Schema dell’AVUM modulo superiore verniero di assetto
2800 3500
2300 600
figura 2.3.2 Volume disponibile (statico + dinamico)
2.3.9 Requisiti fondamentali sul carico pagante
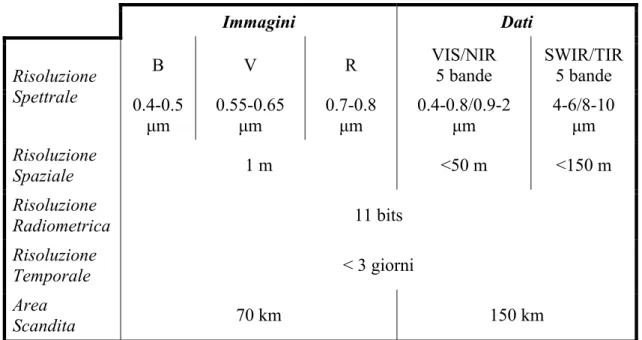
Il carico pagante deve restituire immagini e dati, nel formato desiderato dall’acquirente, tali da essere sufficientemente competitivi con i sistemi satellitari già esistenti. In seguito a ciò si devono fornire immagini a colori per applicazioni carto-grafiche ad alta risoluzione, e dati multispettrali su circa 10 bande di frequenza, in alta e media risoluzione, a partire dal visibile fino all’estremo infrarosso; una breve descrizione tecnica è quindi riportata in tabella 2.3-1.
3 Si tenga presente che quando si parla del carico pagante del lanciatore, si intende il satellite, od il
tabella 2.3-1 Requisiti tecnici del carico pagante Immagini Dati B V R VIS/NIR 5 bande SWIR/TIR 5 bande Risoluzione Spettrale 0.4-0.5 µm 0.55-0.65 µm 0.7-0.8 µm 0.4-0.8/0.9-2 µm 4-6/8-10 µm Risoluzione Spaziale 1 m <50 m <150 m Risoluzione Radiometrica 11 bits Risoluzione Temporale < 3 giorni Area Scandita 70 km 150 km
2.4 Deorbitamento
Il satellite deve venir controllato in tutta la fase di deorbitamento, in accordo con le correnti normative Europee, per cui dev’essere progettato tenendo conto della quantità di propellente necessaria per eseguire la manovra.
2.5 Tempo di sviluppo
E’ stato previsto un margine di tempo tra i 12 e i 15 mesi perché il progetto raggiunga la fase finale a partire dalle fasi iniziali di sviluppo. Si suppone quindi che il sistema diventi operativo a partire dall’anno 2008.
3
3
INTRODUZIONE ALL’ASTRODINAMICA
3.1 Introduzione
Questo capitolo introduce i principi fondamentali dell’astrodinamica ed alcu-ne chiarimenti circa i concetti meccanici utilizzati durante l’analisi orbitale sviluppa-ta nel capitolo quarto.
L’astrodinamica è lo studio della traiettoria di un satellite, del suo cammino nello spazio; quando questo cammino è una curva chiusa si parla di orbita.
Il punto di partenza per lo studio del moto di un satellite è la scelta di un si-stema di riferimento, a cui fa seguito la necessità di una teoria analitica che permetta di conoscere in prima approssimazione la situazione reale della traiettoria. Il mezzo più potente e veloce per arrivare ad una prima comprensione del moto è la teoria ana-litica delle orbite Kepleriane. Questa approssimazione deve essere adeguatamente modificata al maturare del disegno. E’ necessario, infatti, introdurre altri effetti che alterano la forma classica definite dalle Leggi di Keplero per raggiungere la traietto-ria reale del satellite. Forze non desiderate che agiscono sul satellite e ne disturbano il moto, portandolo fuori dall’orbita nominale, sono normalmente chiamate
perturba-zioni. Spiegheremo brevemente le tipiche sorgenti di perturbazione e noteremo le cause più importanti di perturbazione relative alle orbite terrestri a bassa quota.
3.2 Moto Kepleriano
Isaac Newton, nelle celebrate Philosophiae Naturalis Principia Mathematica, ha consolidato le basi della Meccanica Celeste. Partendo dalle Leggi di Keplero, pas-sando attraverso le considerazioni di geni universali come Galileo, Copernico e
Tycho Brahe, è arrivato all’impossibile: rendere fattibile, in un futuro che oggi è or-mai storia, i viaggi spaziali. Il Principia Mathematica, pubblicato nel 1687, è consi-derato largamente il più grande lavoro scientifico creato da un’unica persona e, forse, il più importante contributo allo sviluppo delle conoscenze dell’umanità. In tale lavo-ro sono stabilite le Leggi di Moto chiamate di Newton in onore dall’autore e le for-mulazioni matematiche di una forza particolare: la forza di gravità. Con questa pub-blicazione fu spiegato, finalmente, il moto dei pianeti e dei satelliti. Basandosi sulle opere dei grandi del passato, “over giant’s shoulders”, come egli stesso ha definito la base del proprio lavoro, Newton ha sviluppato la meccanica celeste, partendo da os-servazioni empiriche, fino a produrre una solida struttura matematica con cui è pos-sibile identificare e conoscere il moto dei corpi celesti. Con il moto dei pianeti cono-sciuto attraverso le Leggi di Keplero, egli ha risolto il problema inverso, trovare le forze che producessero questo moto, giustificando le leggi empiriche di Keplero. Fi-nalmente, attraverso questa “nuova” forza, si è reso possibile risolvere il problema diretto, scoprire il moto di un qualunque corpo ne sia affetto.
Un’intuitiva presentazione geometrica delle Leggi di Keplero è:
Prima Legge: L’orbita di ciascun pianeta è un ellisse, con il Sole in uno dei due fuo-chi.
Seconda Legge: La linea che unisce il pianeta al Sole spazza aree uguali in tempi uguali.
Terza Legge: Il quadrato del periodo di rotazione di un pianeta è proporzionale al cubo della sua distanza media dal Sole.
In più, è qui presentata la più generale formulazione della forza di gravità,
r r GMm Fr =− 3 ⋅r
3.2-1
dove Fr è la forza tra due oggetti di massa m ed M, rr è il vettore tra loro e G è la
co-stante di gravitazione di Newton. E’ notazione comune raggruppare G ed M nel ter-mine µ (µ = G·M) definito come costante di gravitazione planetaria. Per la Terra µ (costante di gravitazione geocentrica) ha il valore di 3.986005⋅1014m3 s2.
3.2.1 Equazione di moto di un Satellite
Usando la teoria gravitazionale e le sue leggi della meccanica, Newton fu abi-le a derivare abi-le Leggi di Kepabi-lero ed ad applicarabi-le a qualunque coppia di masse punti-formi (ipotesi di corpi a simmetria sferica) che si muovono sotto la loro mutua
attra-zione gravitazionale. Viene assunto che la gravità sia l’unica forza e che le due masse puntiformi siano gli unici corpi nel sistema.
Il problema kepleriano di due masse mutuamente attratte si riduce allo studio di un unico corpo grazie alla supposizione che uno dei due corpi, detto primario, sia piazzato nell’origine di un sistema di coordinate inerziali. Questa ipotesi risulta tanto migliore quanto più il primario sia di massa maggiore rispetto all’altro corpo, detto
secondario. Questo è il caso di tutti i satelliti artificiali rispetto al corpo centrale di attrazione. Se, invece, le due masse sono comparabili si parla di problema dei due
corpi ed il centro di massa del sistema si troverà tra i baricentri dei due corpi. Due masse a simmetria sferica che interagiscono gravitazionalmente devono rimanere nel piano definito dalle loro velocità e dalle loro posizioni relative, perché le forze sono centrali e non esistono forze che possano muoverli fuori da questo piano. Di conse-guenza, quando la gravità è l’unica forza, l’orbita definita da due oggetti interagenti è completamente determinata dalle loro relative posizioni e velocità.
Combinando la seconda legge di Newton con la sua legge di gravitazione (per esempio vedere [3]) otteniamo un’equazione per il vettore accelerazione del satellite:
(
r)
r 0 dt r d 3 2 2 = ⋅ + − r r µ 3.2-2 dove rr è il vettore tra il Satellite e la Terra e µ la costante di gravitazione terrestre. Moltiplicando vettorialmente l’equazione 3.2-2 con rr si ottiene:( )
0 0 × = = × r r dt d o r rr &&r r &r 3.2-3 ed integrando: h r r &r r r× = . 3.2-4Come risultato, il momento angolare per unità di massa del Satellite, hr, ri-mane costante e perpendicolare al piano dell’orbita (poiché perpendicolare sia ad rr che ad r&r ). Ne segue che il piano orbitale rimane fissato in un riferimento inerziale come notato in precedenza.
Una soluzione dell’equazione 3.2-2 è un’equazione polare di una sezione co-nica che fornisce la grandezza del vettore posizione in funzione della posizione nell’orbita, del tipo
(
)
ν cos e 1 e 1 a r 2 + − = 3.2-5 dove a è il semiasse maggiore, e l’eccentricità e ν è l’anomalia vera. Questo concetto sarà spiegato più approfonditamente nel prossimo paragrafo.3.2.2 Elementi orbitali classici
L’equazione 3.2-2 rappresenta un sistema di tre equazioni differenziali scalari del secondo ordine. Per integrare il sistema sono necessarie sei condizioni di integra-zione. Ci sono parecchi modi alternativi per selezionare questo gruppo di condizioni, una prima possibilità è quella di utilizzare la posizione e la velocità all’istante inizia-le, ma la scelta più utilizzata è di utilizzare un gruppo di parametri chiamati elementi
orbitali classici, che hanno il vantaggio di fornire una percezione veloce ed intuitiva
della geometria dell’orbita. Gli elementi orbitali classici sono formati dai parametri:
a, e, ω, i, Ω e υ (vedere figura 3.2.1, estratta da [4], per ω, i, Ω, υ e figura 3.3.2 per a, e e υ).
Il semiasse maggiore, a, e l’eccentricità, e, definiscono la forma e la taglia dell’orbita. La rotazione dell’orbita nel proprio piano è definite dall’argomento del perigeo, ω. L’inclinazione, i, e l’ascensione retta del nodo ascendente (RAAN), Ω, definiscono il piano dell’orbita. In fine l’anomalia media specifica la posizione del satellite nell’orbita al tempo dell’epoca.
L’intersezione del piano dell’orbita e del piano di riferimento attraverso il centro di massa del corpo principale è chiamata linea dei nodi, dove i nodi sono i punti di intersezione della traiettoria dell’orbita sul piano di riferimento. In un satelli-te in orbita satelli-terrestre il piano di riferimento è quello equatoriale. Il nodo discendensatelli-te è il punto dove il satellite attraversa il piano di riferimento da nord a sud, il nodo a-scendente dove l’attraversamento avviene da sud a nord. La linea congiungente il pe-rigeo con baricentro del corpo principale è chiamata, invece, linea degli apsidi.