1
Capitolo 1
INTRODUZIONE
Con l’acronimo RFID, ‘Radio Frequency IDentification’, sono indicati i dispositivi predisposti al riconoscimento a distanza di un oggetto, mediante la trasmissione di onde a radio frequenza. La tecnologia RFID propone nuove soluzioni per sostituire le tradizionali e collaudate tecniche per l’identificazione automatica degli oggetti, quali quelle che utilizzano codici a barre, carte di accesso a banda magnetica o smart card.
Questi componenti, che hanno già trovato grande impiego nel campo della sicurezza, nel riconoscimento delle persone e animali, nella logistica e in molti altri campi, hanno la caratteristica particolare di poter essere interrogati da distanze più o meno grandi.
In questo capitolo viene fatta una panoramica sui sistemi RFID, mettendo in risalto alcuni aspetti che li caratterizzano. Vengono analizzate più in dettaglio le differenze tra le due procedute utilizzate (Full Duplex / Half Duplex e Sequenziale) cercando di capire i vantaggi dell’una nei confronti dell’altra. Vengono analizzati alcuni dispositivi ad accoppiamento induttivo che utilizzano un protocollo sequenziale nella banda LF. I sistemi esaminati vengono prodotti dalla Texas Instruments (TI) ed appartengono alla famiglia TIRIS (Texas Instruments Registration and Identification System). Essendo tra i pochi prodotti di tipo sequenziale che si trovano in commercio, viene fatta una breve analisi delle caratteristiche analizzando alcuni datasheet e manuali forniti da TI .
2
1.1 Sistemi RFID
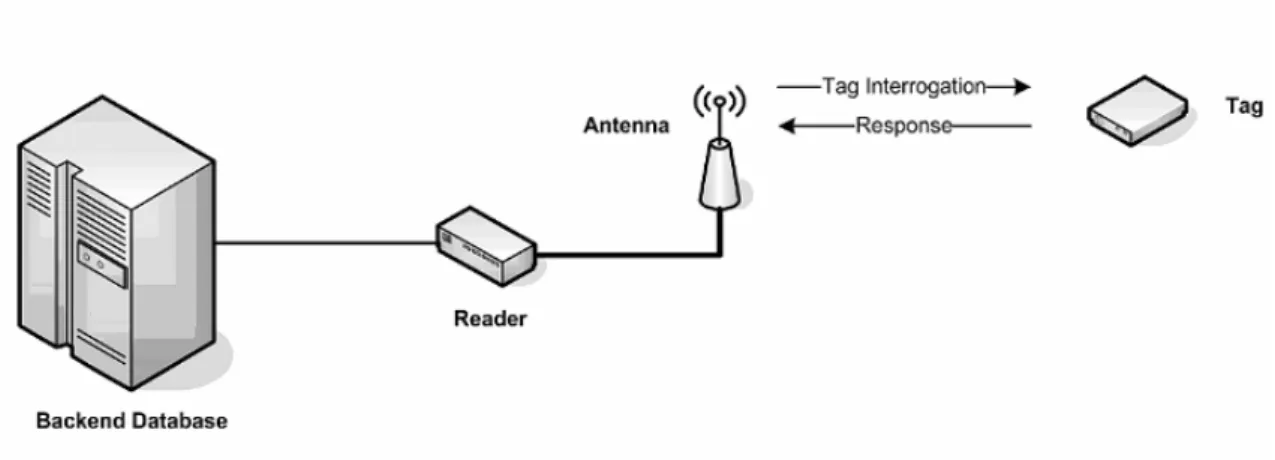
Un sistema di Identificazione a Radio Frequenza è costituito da un lettore (reader) e da uno o più transponder (tag), in grado di comunicare tra loro mediante un segnale modulato a radio frequenza. Il reader interroga il tag, ottiene le informazioni richieste e le invia ad un elaboratore.
Il reader contiene tipicamente al suo interno un modulo a radio frequenza, che funziona da trasmettitore e da ricevitore, un’unità di controllo e un elemento che permette l’accoppiamento elettromagnetico con il tag. Dispone inoltre di interfacce supplementari per trasmettere i dati ricevuti al sistema di elaborazione (PC, sistema di controllo, etc.).
Il tag può essere posizionato sia all’esterno sia all’interno dell’oggetto che si deve identificare: è costituito da un microchip e da un elemento di accoppiamento, un’antenna, che permette lo scambio dei dati con il reader.
All’interno di ciascun transponder sono memorizzate le informazioni relative all’oggetto nel quale il tag è collocato, che consistono, nella maggior parte dei casi, in un codice identificativo unico, memorizzato in fase di produzione. I dati vengono memorizzati su una EEPROM, sia per i tag accessibili in sola lettura sia per quelli accessibili anche in scrittura. La capacità di immagazzinamento di dati da parte del transponder può variare dal singolo byte fino a decine di kbyte.
3 Nel caso in cui il reader debba individuare se un oggetto è presente o meno all’interno del campo di interrogazione, senza la necessità di ottenere altri tipi di informazioni, è sufficiente che il tag invii un segnale a due stati, quantità d’informazione contenuta in un bit. Questo genere di dispositivo (1-bit transponder) viene ampiamente utilizzato nella sorveglianza ed è noto come EAS (Electronic Article Surveillance).
Per il trasferimento di dati da reader a transponder può essere utilizzata qualsiasi tipo di modulazione digitale (ASK, FSK e PSK) indipendentemente dal tipo di accoppiamento e dalla frequenza.
Se un tag è posizionato all’interno della zona di interrogazione del lettore, inizia a trasmettere continuamente il proprio numero seriale. È necessario però che nella zona di interrogazione del reader ci sia un solo e unico tag, in caso contrario più tag che trasmettono simultaneamente possono dar luogo a una collisione di dati: il lettore non è in grado di distinguere i diversi tag. Per questo tipo di sistemi deve essere quindi previsto un algoritmo anticollisione che permetta al lettore di rilevare ed identificare tutti i tag presenti nella zona operativa, in modo da accedervi singolarmente.
A seconda dell’applicazione alla quale sarà destinato, un transponder viene costruito in modo da avere dimensioni, forma ed abilità specifiche. Si pensi ad esempio ad un transponder in vetro, ideale per essere iniettato sotto la cute di un animale: è costituito da un tubo di vetro di appena 12 - 32 mm contenente un microchip e un’antenna. Lo stesso tipo di transponder ma con rivestimento in plastica, presenta una tolleranza maggiore alle vibrazioni meccaniche e si presta ad applicazioni nell’industria automobilistica [1].
Le norme che governano i sistemi RFID riguardano principalmente le potenze di emissioni del lettore e l’assegnazione delle bande di frequenza, mentre gli standard definiscono l’interfaccia di comunicazione tra lettore-tag, tag-lettore, ed include parametri come protocollo di comunicazione, tipo di modulazione del segnale, codifica e struttura dati, velocità trasmissione e procedura anticollisione. La situazione attuale vede come principali standard quelli della ISO (International Organization for Standardization) e della EPCglobal.
4
1.2 Alimentazione del tag
In base al tipo di alimentazione dei componenti attivi del tag è possibile attuare una suddivisione tra tag passivi, semi-passivi e attivi.
L’energia per il funzionamento dei circuiti presenti su un transponder passivo, proviene esclusivamente dal reader, fornita sotto forma di campo elettromagnetico. I tag di questo tipo sono i più impiegati nei sistemi RFID, in quanto hanno un costo molto inferiore rispetto a quelli attivi, hanno dimensioni ridotte in quanto non devono alloggiare una batteria, hanno tempi di vita teoricamente infiniti, in quanto possono stare anche anni senza trasmettere informazioni e farlo solo quando interrogati dal reader, hanno la possibilità di essere realizzati nelle forme più svariate. La distanza massima che riescono a coprire, dell’ordine di qualche metro, è minore rispetto a quelli attivi e varia a seconda della frequenza di funzionamento e del tipo di applicazione.
In un tag semi-passivo è presente una batteria che ha il compito di alimentare il circuito elettronico integrato sul transponder. Tutto ciò gli permette di funzionare con livelli più bassi di potenza del segnale, con conseguenti distanze di funzionamento maggiori, fino alla decina di metri. La distanza è principalmente limitata dal fatto che questi transponder non hanno un trasmettitore integrato, quindi sono ancora obbligati ad usare il campo del lettore per trasmettere dati (backscatter).
I tag attivi sono dispositivi autoalimentati da batteria e possiedono un trasmettitore attivo a bordo. Al contrario dei tag passivi e semi-passivi, i tag attivi prelevano l’energia necessaria alla trasmissione dei dati direttamente dalla batteria. Per questo motivo possono comunicare con il lettore a distanze di gran lunga superiori rispetto agli altri due tipi di transponder.
In generale i dispositivi che utilizzano una batteria, tag semi-passivi e attivi, risultano più costosi, sono più ingombranti e soprattutto hanno una vita media di funzionamento legata alla durata della batteria stessa.
5
1.3 Frequenza di funzionamento
La frequenza di funzionamento di un sistema RFID corrisponde alla frequenza alla quale trasmette il reader, indifferentemente da quella con la quale il tag invia i dati, anche se nella maggior parte dei casi le due coincidono.
La necessità che i sistemi RFID non interferiscano con gli altri sistemi in circolazione, restringe significativamente le frequenze operative disponibili. Per questo motivo sono stati riservati dei range di frequenze appositi per applicazioni di tipo industriale, scientifiche e militari.
Queste frequenze sono classificate in tutto il mondo come ISM (Industrial-Scientific-Medical) e possono essere utilizzate anche dai sistemi RFID.
Le bande di frequenza più importanti per questi tipi di sistema sono quattro: 125-135 kHz (LF), 13.56 MHz (HF), 868-928.0 MHz (UHF), 2.45 GHz (microonde). Per sistemi RFID in banda UHF le frequenze assegnate in alcuni paesi non sono consentite in altri, poiché sono molto vicine alle fasce di frequenza già assegnate per altri dispositivi [1].
A seconda della frequenza a cui opera il sistema, cambia sia il tipo di accoppiamento tra tag e reader che le prestazioni del sistema, valutate in termini di distanza di funzionamento.
1.3.1 Tag nella banda LF e HF
I tag passivi che operano con frequenze nella banda LF e HF utilizzano l’accoppiamento induttivo tra due bobine (antenna del lettore e del tag) sia per l’alimentazione che per trasmettere i dati ed hanno un raggio di azione inferiore al metro. La comunicazione dal lettore al tag avviene tramite la modulazione dell’ampiezza del campo generato (modulazione ASK).
Il circuito equivalente del sistema è quello di un trasformatore, dove al primario c’è il reader ed al secondario il transponder. Modificando il carico presente sul secondario, attraverso il circuito presente sul tag, viene trasferita l’informazione al primario.
6 L’accoppiamento tag-lettore è molto più debole dell’accoppiamento lettore-tag: per evitare la sovrapposizione dei due segnali, che renderebbe illeggibile l’informazione, generalmente il tag trasmette su due bande laterali rispetto alla portante trasmessa dal reader.
1.3.2 Tag nella banda UHF
I sistemi RFID che hanno una distanza di funzionamento superiore al metro, operano generalmente nella banda UHF (868 MHz in Europa e 915 MHz in USA) o delle microonde (2.5 GHz e 5.8 GHz): l’accoppiamento tra tag e reader avviene attraverso onde elettromagnetiche. A queste frequenze, la lunghezza d’onda è molto piccola e di conseguenza anche la dimensione delle antenne da utilizzare, con la possibilità di realizzare sistemi di dimensioni molto ridotte.
Per distanze inferiori ai 3 m si utilizzano tag passivi, mentre per intervalli superiori, fino ai 15 m, si impiegano tag semi-passivi.
Al tag arriva soltanto una piccola frazione della potenza emessa dal reader, energia che una volta rettificata mediante dei diodi, va ad alimentare il circuito. Generalmente vengono utilizzati dei diodi Schottky perché hanno una bassa tensione di soglia e sono utilizzabili anche alle alte frequenze, dal momento che la corrente è dovuta soltanto alle cariche maggioritarie [1]. Parte dell'energia viene quindi assorbita mentre una parte viene riflessa, opportunamente modulata, verso il lettore (modulazione backscatter). La trasmissione dei dati dal tag al reader è realizzata mutando il coefficiente di riflessione: si può ottenere sia una modulazione di tipo ASK o che di tipo PSK.
Alle alte frequenze c’è però l’inconveniente, comune anche ad eventuali sistemi SEQ che andrebbero ad operare in questo range, che l’energia che raggiunge il tag risulta molto attenuata dalle perdite nello spazio libero.
2
4
tag reader reader tag c
P P G G rf p æ ö = × × ×ç ÷ è ø (1.1)
Dalla relazione (1.1) è possibile vedere che la potenza che raggiunge il tag (Ptag) è inversamente proporzionale al quadrato della distanza e al quadrato della
7 frequenza e dipende, linearmente, dalla potenza emessa dal reader (Preader), dal
guadagno dell’antenna in trasmissione e da quella in ricezione.
Se da una parte alle alte frequenze ho la possibilità di realizzare dispositivi di dimensioni ridotte, ho il problema che l’energia a disposizione del circuito risulta molto inferiore rispetto a circuiti che operano a frequenze più basse, a causa della maggiore attenuazione. Per aumentare le prestazioni del sistema e raggiungere distanze dell’ordine di una decina di metri o operare con circuiti molto complessi che hanno un elevato consumo di energia, l’unica soluzione è quella di utilizzare una batteria a bordo del transponder.
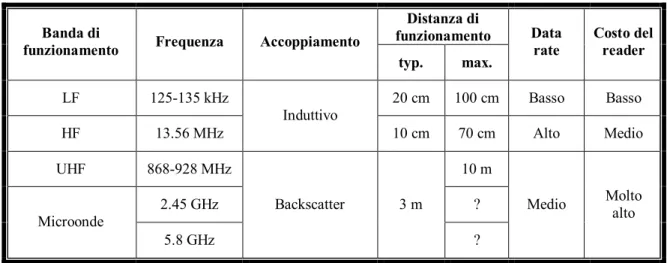
Distanza di funzionamento Banda di
funzionamento Frequenza Accoppiamento
typ. max. Data rate Costo del reader LF 125-135 kHz 20 cm 100 cm Basso Basso HF 13.56 MHz Induttivo 10 cm 70 cm Alto Medio UHF 868-928 MHz 10 m 2.45 GHz ? Microonde 5.8 GHz Backscatter 3 m ?
Medio Molto alto
Tabella 1.1 Caratteristiche sistemi RFID passivi
1.4 Sistemi Full Duplex / Half Duplex e Sequenziali
Tutti i sistemi RFID operano seguendo una delle due procedure di base [1]: esistono i sistemi Full Duplex (FDX) / Half Duplex (HDX) oppure i sistemi di tipo Sequenziali (SEQ): la differenza sostanziale consiste nella presenza (FDX/HDX) o meno (SEQ), del campo a radio frequenza emesso dal reader quando il tag trasmette. Nella letteratura relativa ai sistemi RFID, la suddivisione viene anche fatta con riferimento all’occupazione del canale di trasmissione e ricezione da parte del transponder e del reader: in questo caso i sistemi vengono
8 suddivisi in HDX (prima definiti come SEQ) se tag e reader non trasmettono contemporaneamente e FDX (che adesso raccoglie i sistemi che erano stati definiti come FDX e HDX), in cui i canali vengo occupati contemporaneamente. Noi da ora in poi faremo riferimento al primo criterio di suddivisione introdotto.
1.4.1 Sistemi FDX/HDX
Nei sistemi FDX e HDX la risposta del transponder viene trasmessa contemporaneamente al campo a radio frequenza emesso dal reader. Essendo il segnale trasmesso dal tag, che raggiunge l’antenna del reader, di ampiezza molto inferiore rispetto al segnale emesso dal reader stesso, sono necessarie particolari procedure per distinguere i due segnali, il che implica reader molto più sensibili e quindi dal costo maggiore.
Nella procedura di tipo HDX il trasferimento dei dati dal tag al reader si alterna al trasferimento dei dati da reader a tag: per frequenze inferiori ai 30 MHz, la procedura HDX è la più utilizzata.
Nella procedura di tipo FDX il trasferimento dei dati dal transponder al reader avviene contemporaneamente al trasferimento dei dati dal reader al transponder.
Le procedure FDX e HDX hanno in comune il fatto che il trasferimento di energia da reader a tag, che non deve essere confuso con il trasferimento dei dati, è continuo e indipendente dalla direzione in cui viaggia l’informazione. Nello stadio di ingresso, posta tra l’antenna ed il circuito del transponder, c’è una rete di adattamento dimensionata in modo tale da avere il massimo trasferimento di potenza che, in condizioni di adattamento, corrisponde alla metà di quella disponibile in ingresso
1.4.2 Sistemi SEQ
Nella procedura di tipo sequenziale il campo emesso dal reader viene interrotto ad intervalli regolari, durante i quali il transponder invia i dati richiesti. Questi sistemi, che si trovano in commercio solo nella banda LF, utilizzano un accoppiamento di tipo induttivo ed hanno un range di funzionamento che difficilmente supera il metro.
9 Lo svantaggio dei sistemi SEQ rispetto a quelli FDX/HDX è che durante l’intervallo in cui il reader smette di trasmettere il campo elettromagnetico, il tag non viene alimentato: sono quindi necessarie delle batterie ausiliarie o delle capacità, da utilizzare come sorgenti di energia, che devono essere caricate nell’intervallo in cui il reader trasmette.
Un ciclo di lettura completo è composto da due fasi ben distinte: la fase di carica (charging phase) e la fase di lettura (reading phase) [2].
Durante la fase di carica il chip non assorbe potenza e tutta l’energia disponibile viene utilizzata per caricare la capacità da utilizzare come batteria. All’inizio la capacità C è completamente scarica, quindi la corrente che vi scorre all’inizio della carica è massima. Mano a mano che C accumula energia, la corrente che l’attraversa tende a diminuire e l’impedenza mostrata al circuito è sempre maggiore. Alla fine della carica la capacità non è attraversa da nessuna corrente e la tensione ai suoi capi è pari alla tensione a vuoto in uscita dal raddrizzatore. Quando il reader smette di trasmettere, la capacità di comincia a scaricarsi: una parte del circuito atto ad individuare questo istante, fa si che il resto del sistema si attivi e cominci la trasmissione dei dati. Alla fine della fase di trasmissione, la capacità utilizzata come batteria, viene completamente scaricata.
Un grosso vantaggio di questa configurazione e che al reader arriva soltanto il segnale trasmesso dal transponder e quindi è necessaria una sensibilità molto inferiore, che si traduce in un circuito più semplice e quindi meno costoso.
In teoria, mentre per un sistema FDX/HDX la massima potenza disponibile è fissata dalla rete di adattamento, in un sistema SEQ l’energia a disposizione della rete dipende solamente dalle dimensioni della capacità C e dalla durata del tempo a disposizione per la carica.
Lo scopo di questa tesi è definire dei criteri di progettazione dell’interfaccia a RF di transponder RFID sequenziali in banda UHF, cercando di capire se è possibile estendere l’utilizzo di questi dispositivi a questa banda, oppure se vi sono problemi realizzativi che ne impediscono lo sviluppo. Occorre inoltre valutare se i vantaggi derivanti da un ricevitore molto più semplice e quindi
10 meno costoso, rispetto ai sistemi FDX/HDX, sono tali da giustificare l’impiego di questo tipo di apparati, laddove i sistemi backscatter hanno raggiunto oramai prestazioni difficilmente eguagliabili.
La rete di adattamento, come vedremo nei prossimi capitoli, non deve essere dimensionata per ottenere il massimo trasferimento di potenza, ma per ottimizzare la carica di C. Vedremo che il duplicatore di tensione ha un circuito equivalente composto dal parallelo di una resistenza e di una capacità: l’idea è dimensionare la rete di adattamento in maniera tale che si venga a creare un circuito risonante serie RLC, in modo da innalzare la tensione in ingresso al duplicatore ed ottenere una carica di C in tempi più rapidi e per valori di tensione più elevati. Occorre capire come si comporta il circuito nel transitorio, in modo da ottenere dei criteri per la progettazione del duplicatore e della relativa rete di adattamento, analizzando le prestazioni del sistema e l’influenza dei vari parametri circuitali. Vengono utilizzati sia componenti integrati che componenti discreti, mettendo in risalto il differente comportamento e le diverse problematiche. Si vedrà che a queste frequenze l’influenza degli elementi parassiti è determinante e modifica sensibilmente il comportamento del circuito.
11 Uno dei problemi maggiori è che gli oscillatori nella banda UHF consumano molta energia [3] e sono un problema per un vasto campo di applicazioni che operano senza batterie: questo limiterà molto il range di funzionamento del dispositivo ed allungherà notevolmente i tempi di carica, in quanto sarà necessario utilizzare una capacità C dell’ordine del uF.
1.5 Transponder sequenziali
In letteratura, sui sistemi SEQ, si trovano solo alcune pubblicazioni su prodotti nella banda LF ad accoppiamento induttivo: tutte menzionano la piena compatibilità con il sistema TIRIS (Texas Instruments Registration and Identification System), che risulta un marchio registrato da Texas Instruments.
All’interno della famiglia dei tag a bassa frequenza troviamo una vasta gamma di prodotti, dalle capsule in vetro a quelli a cuneo, da quelli cilindrici a quelli a disco [4]. Vengono utilizzati per il controllo degli accessi, per l’identificazione dei veicoli e degli animali, la tracciatura dei container, la gestione delle merci, ecc... Vengono forniti in differenti forme e dimensioni e possono essere posti sull’oggetto da identificare o all’interno, infatti risultano insensibili alla maggior parte dei materiali non metallici. Tutti i transponder sono passivi, ed hanno una portata che va dai 20 cm ai 2 m [5] [6].
Hanno una memoria che varia dai 64 bit per quelli accessibili in sola lettura (Read Only Transponder – RO), agli 80 bit per quelli accessibili in lettura e scrittura (Read/Write Transponder – R/W), che sono garantiti per circa 100,000 cicli di programmazione [7]. Per i Multipage Transponder (MPT), la memoria può arrivare fino a 1360 bit, ed è suddivisa in 17 pagine.
La frequenza operativa è 134.2 kHz, la modulazione è FSK e vengono rispettati gli standard ISO/IEC 11785/11785.
12
Glass Transponder Disk Transponder Cylindrical Transponder
Wedge Transponder Keyring Transponder Card Transponder
Figura 1.3 Transponder passivi LF della Texas Instruments
Per la scrittura sulla memoria del tag è necessario una tensione superiore a quella per effettuare un ciclo di lettura, quindi la distanza per la scrittura risulta inferiore del 30% rispetto a quella in lettura.
Il tempo necessario alla trasmissione dei dati, così come quello per la scrittura, è funzione della grandezza della memoria e varia dai 70 ms per i transponder da 64 e 80 bit, agli 86 ms per quelli da 1360 bit [5] [6] [7].
PARAMETRI Transponder
Funzionalità Lettura Lettura/Scrittura MTP
Memoria (Bit) 64 80 1360
Frequenza 134.2 kHz
Protocollo Sequenziali
Modulazione FSK 134.2 kHz / 123.2 kHz
Distanza di lettura 20 – 200 cm
Distanza di scrittura 30% della distanza di lettura
Tempo di lettura 70 ms 86 ms
Tempo di scrittura 309 ms 293 ms
Cicli di scrittura 100,000
Peso 0.4 – 60 g
13
1.5.1 Ciclo di lettura
Durante la fase di carica, che dura tra i 15 ed i 50 ms, il reader trasmette un campo elettromagnetico alla frequenza di 134.2 kHz. Il circuito risonante del transponder viene alimentato dal campo e la tensione indotta ai capi dell’antenna, viene raddrizzata per caricare la capacità.
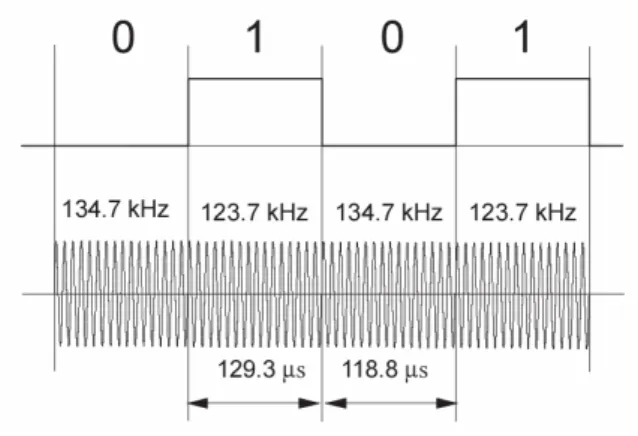
Quando il reader smette di trasmettere, il transponder invia i dati utilizzando l’energia immagazzinata nella capacità. Lo ‘0’ logico viene trasmesso con una frequenza di 134.7 kHz mentre ‘1’ logico con una frequenza di 123.7 kHz [2].
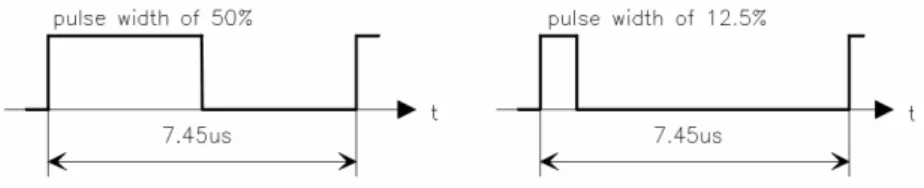
Figura 1.4 Modulazione FSK
La trasmissione dei due stati logici impiega tempi diversi, in quanto ogni bit trasmesso occupa 16 cicli dell’onda: la trasmissione di uno zero avviene in 129.3 μs mentre per il livello logico alto occorrono 118.8 μs. I dati vengono codificati con il metodo NRZ (Non Return to Zero) ed il clock viene ottenuto dividendo per 16 la frequenza di trasmissione generata dall’oscillatore interno. La trasmissione dei dati, composta da 128 bit, impiega al massimo 20 ms per essere completata. A seconda che i dati vengano inviati da un transponder accessibile in sola lettura o da uno accessibile anche in scrittura, variano gli start/stop byte e gli end byte, in modo da avere una distinzione netta tra i due dispositivi [8].
Alla fine della trasmissione dei dati la capacità viene completamente scaricata ed il tag è pronto per un altro accesso.
14 Figura 1.5 Tensione ai capi della capacità C durante un ciclo di lettura
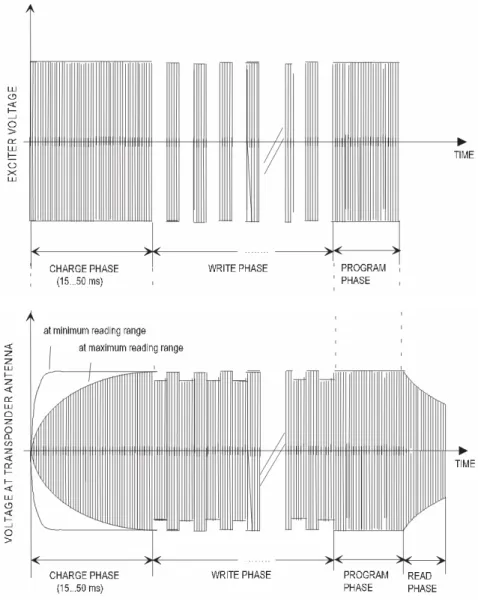
1.5.2 Ciclo di scrittura
Nel caso di transponder accessibili anche in scrittura è possibile modificare il codice identificativo contenuto nella memoria. La fase di scrittura inizia caricando il tag, come se dovesse effettuare una semplice trasmissione di dati.
La trasmissione avviene modulando l’ampiezza, con un indice del 100%, del campo trasmesso. L’informazione sul tipo di bit trasmesso è contenuta nella durata della fase in cui il campo è disattivato, ovvero si tratta di una modulazione PWM (Pulse Width Modulation).
I dati ricevuti dal tag vengono scritti in un registro a scorrimento per essere memorizzati in una fase successiva. Una volta che il reader ha trasmesso tutti i dati attiva nuovamente il campo (programming phase), in modo da alimentare il transponder e far si che le informazioni contenute nel registro vengono scritte nella memoria EEPROM. Gli 80 bit contenuti nel registro vengono scritti tutti contemporaneamente all’interno della memoria.
15 Una volta finita la fase di programmazione, il reader disattiva il campo trasmesso ed inizia una fase di lettura in cui il transponder invia i dati appena memorizzati per verificarne la correttezza.
Figura 1.6 Ciclo di scrittura completo
Uno dei vantaggi provenienti dall’utilizzo di un sistema di tipo sequenziale è dato dall’assenza del campo prodotto dal reader, di ampiezza elevata, nella fase
16 di trasmissione dei dati, che permette di utilizzare lettori con sensibilità inferiore rispetto ai sistemi di tipo duplex.
La trasmissione da parte del transponder avviene utilizzando un oscillatore e questo permette di avere un segnale in uscita di una certa intensità, che viene stimato essere 6.20 dB maggiore rispetto ai sistemi convenzionali [8].
La codifica NRZ, che occupa una banda molto ridotta in trasmissione, associata alla modulazione FSK, permette di raggiungere un data rate di 9 kbit/s.
Il fatto che il reader non trasmetta continuamente, ma soltanto nella fase di carica, riduce notevolmente il consumo di potenza da parte del lettore. Questo fatto è supportato dal fatto che anche il campo emesso ha una intensità molto ridotta. Transponder di questo tipo sono quindi da utilizzare la dove il consumo energetico legato all’interrogazione dei tag può costituire un problema.
C’è da osservare che il tempo necessario alla carica influisce direttamente sulla distanza di funzionamento del dispositivo, quindi se voglio dei cicli di lettura che durino meno è necessario diminuire la portata del sistema.
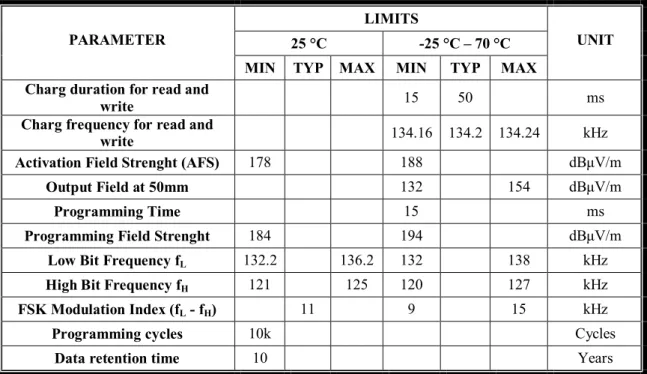
Nella tab. 1.3 sono riportate alcune caratteristiche di un transponder TIRIS in vetro da 32 mm [7].
LIMITS
25 °C -25 °C – 70 °C PARAMETER
MIN TYP MAX MIN TYP MAX
UNIT
Charg duration for read and
write 15 50 ms
Charg frequency for read and
write 134.16 134.2 134.24 kHz
Activation Field Strenght (AFS) 178 188 dBμV/m
Output Field at 50mm 132 154 dBμV/m
Programming Time 15 ms
Programming Field Strenght 184 194 dBμV/m
Low Bit Frequency fL 132.2 136.2 132 138 kHz
High Bit Frequency fH 121 125 120 127 kHz
FSK Modulation Index (fL - fH) 11 9 15 kHz
Programming cycles 10k Cycles
Data retention time 10 Years
17
1.6 Antenne
Per utilizzare i transponder appena descritti, la Texas Instruments fornisce due tipi di antenna, una fatta a bastoncino (Stick Antenna) ed una di tipo a porta (Gate Antenna). L’antenna di tipo gate viene realizzata in tre diverse dimensioni ma deve essere posta al massimo ad un metro dal reader mentre quella di tipo Stick, a seconda del modello, può essere posta ad uno o tre metri dal lettore. Esiste anche una versione molto ridotta di antenna Stick, per applicazioni particolari, che deve essere posta nelle immediate vicinanze del reader [9] [10].
Stick Antenna Gate Antenna
Figura 1.7 Antenne LF della Texas Instruments per sistemi TIRIS
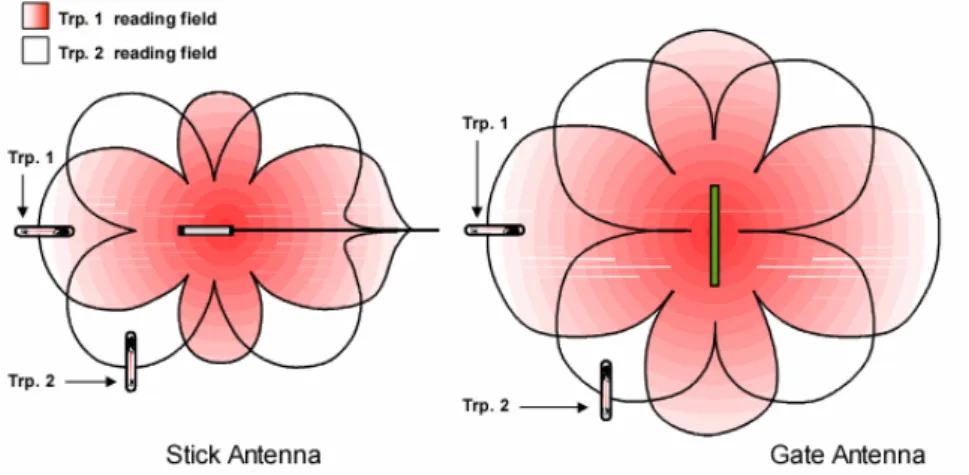
Ogni antenna è in grado di coprire una zona più o meno estesa e dalla forma specifica: generalmente l’antenna di tipo Gate copre una superficie molto ampia ed arriva a grandi distanze mente quella di tipo Stick è un’antenna direzionale che copre soltanto una certa area dello spazio circostante ed è quindi in grado di distinguere tra i transponder presenti nelle immediate vicinanze.
18 Figura 1.8 Diagramma di radiazione
1.7 Reader
Per leggere da un TIRIS 64-bit RO transponder, leggere e programmare un R/W transponder, un MPT o un Selective Addressable Multipage Transponder (SAMPT), costituito da 17 pagine di memoria indirizzabili ed identificate da un codice a 24 bit, occorre un reader, composto da un’antenna, un modulo a radio frequenza (modulo RF), un modulo di controllo ed uno per l’alimentazione [11].
19 A seconda del modello di reader scelto, i vari blocchi possono essere costituiti da moduli differenti collegati tra loro o trovarsi all’interno della stessa unità.
1.7.1 RF Module
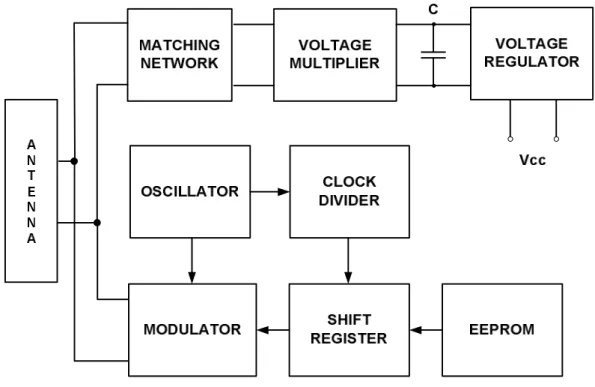
Il trasmettitore del modulo RF deve essere in grado di caricare il tag, scrivere i dati nel registro a scorrimento mediante modulazione PWM e programmare la EEPROM. Il ricevitore del modulo RF deve effettuare la demodulazione dei dati trasmessi dal transponder, generando un’uscita di tipo digitale (RXDT) da inviare al modulo di controllo. Un blocco all’interno del ricevitore si occupa di generare un segnale di clock digitale (RXCK), dividendo per 16 la portante del segnale modulato FSK trasmesso dal tag [12].
Il modulo RF (fig. 1.10) viene alimentato mediante gli ingressi VLS e GND: all’interno ci sono due regolatori di tensione che alimentano separatamente la parte digitale e quella analogica. E’ anche possibile alimentare il modulo con una tensione +5 V regolata all’esterno del circuito, attraverso l’ingresso VD.
La parte relativa al trasmettitore viene alimentata separatamente dal resto del circuito a causa dell’elevato assorbimento di corrente, attraverso i piedini VSP e GNDP, alimentazione che deve essere regolata esternamente.
La frequenza del trasmettitore viene generata dividendo quella di un oscillatore al quarzo, generalmente più elevata, in modo da ottenere 134.2 kHz. L’oscillatore ha una protezione contro eventuali sovraccarichi di corrente dovuti allo stadio di alimentazione del trasmettitore.
L’indice della modulazione PWM, mediante dei jumper, può essere variato tra il 3% e il 50%: diminuendo la larghezza del segnale (diminuendo l’indice di modulazione), diminuisce anche l’intensità del campo trasmesso, che quindi trasmette una quantità minore di energia al transponder.
20 Figura 1.11 Schema a blocchi del modulo RF standard [12]
21
SIGNAL I/O DESCRIPTION
GND I Logic round
TXCT- I Transmitter control input for activation of transmitter VSL I Supply voltage for logic and receiver RXDT O Logic level compatible receiver data signal output RXSA I/O Receiver signal strength adjust for RXSS- threshold level RXCK O Logic level compatible receiver clock output GNDP I Transmitter power stage ground RXA0 I Receive multiplexer channel select signal
VSP I Supply voltage for transmitter power stage RXSS- O Receiver signal strength output
VD I/O Internal/externally regulated supply voltage output/input F_OSC I/O Pulse width modulated transmitter oscillator signal TXCT-R I Transmitter control signal via resistor
F_ANT O Antenna resonance frequency output signal RXA, RXB I Receive-only antenna resonator
ANT I/O Antenna resonator GNDA I/O Antenna resonator ground
Tabella 1.4 Descrizione terminali modulo RF standard
SIMBOL PARAMETRI min. typ. max. Unit
V_VSP transmitter power stage Supply voltage for 5.0 14.0 V I_VSP transmitter power stage Supply current for 1.2 A P_VSP Power input to transmitter power stage 16.8 W V_ANT Antenna resonance voltage 240 Vpeak V_VSL Supply voltage input for logic part 6.0 25.0 V
I_VD
External current load on internal regulated logic
supply voltage output 1.0 mA V_VD Internal regulated logic supply voltage putpup 4.75 5.0 5.25 V I_VSL Supply current for logic and receiver part 11 mA L_TUNE Inductance of antenna tuning coil 1.3 3.0 4.7 uH C_ANT Total antenna resonator capacity 45.8 47 48.2 nF
22 Il modulatore PWM ed il trasmettitore si attivano quando il segnale TXCT- (dove il – indica che è attivo basso), proveniente dal modulo di controllo, viene messo a terra.
Il segnale modulato viene amplificato (Transmitter Power Stage) ed inviato al circuito dell’antenna (fig. 1.11), costituito da un avvolgimento e da una capacità, risonanti alla frequenza di trasmissione di 134.2 kHz. L’induttanza complessiva è data dalla serie di L_ANT, collegata tra i terminali ANT e GNDA e di L_TUNE. La capacità è data dal parallelo di C1 con la serie tra C2, C3 e C_COUPLE. I condensatori vengono connessi in serie e parallelo a causa dell’elevata tensione che si viene a creare nel circuito risonante e dell’elevata corrente che scorre nel circuito risonante [12].
Figura 1.12 Schema elettrico del circuito dell’antenna
Il circuito viene sintonizzato sulla frequenza di risonanza per ottenere una tensione elevata e di conseguenza un campo, necessario alla carica del transponder, di ampiezza sufficientemente grande.
Il segnale ricevuto dal transponder induce una tensione ai capi del circuito risonante dell’antenna, che risulta accoppiato mediante la capacità C_RX al
23 ricevitore. Spostando alcuni jumper l’antenna ricevente può anche essere diversa da quella utilizzata per la trasmissione: nello schema a blocchi (fig. 1.10) deve essere collegato COMB nel caso di un’unica antenna e SEP nel caso di antenne separate. Le antenne per la ricezione possono anche essere due collegate ad un ricevitore multiplexer, dove il canale attivo viene selezionato dal segnale RXA0.
Il segnale dall’antenna viene inviato al ricevitore che contiene un filtro passa banda di ampiezza 22 kHz e attenuazione -3dB: una volta filtrato, il segnale viene amplificato e demodulato. Il blocco Receive Interface si occupa di rendere compatibile il segnale con la logica Low Power Schottky TTL e HCMOS, generando il segnale RXDT (contenente le informazioni trasmesse dal transponder) e il segnale RXCK (segnale di clock generato per decodificare il flusso dei dati RXDT).
Il ricevitore è in grado di valutare anche l’ampiezza del segnale ricevuto ed emettere una uscita digitale (RXSS-), che diventa attiva quando il valore supera un certa soglia, modificabile con un potenziometro. Questo segnale viene utilizzato per verificare se nell’area c’è un altro reader che trasmettere ed eventualmente effettuare la sincronizzazione delle due unità.
24
1.7.2 Control Module
Il modulo di controllo, realizzato con un microprocessore, una macchina a stati finiti o una combinazione dei due, si occupa della temporizzazione delle varie fasi e della protezione dei dati. Deve inoltre convertire le informazioni ricevute dal tag, in uno degli standard che permettono la comunicazione con le varie interfacce in commercio.
Le funzioni che possono essere gestite dal modulo di controllo possono essere così suddivise [2]:
§ CHARGE-ONLY READ: il contenuto della memoria del transponder può essere letto senza indirizzare alcuna pagina. Sono richieste soltanto la fase di carica (Charge phase) e la successiva fase di lettura (Read phase);
§ GENERAL READ PAGE: il contenuto di una certa pagina della memoria viene indirizzato attraverso la trasmissione dell’indirizzo ed inviato al reader nella successiva fase di lettura;
§ PROGRAM PAGE: nella fase di scrittura (Write phase) viene indirizzata una pagina della memoria ed inviati gli 80 bit, che vengono copiati in un registro a scorrimento. Nella fese di programmazione (Program phase) il contenuto del registro viene memorizzato nella EEPROM. I nuovi dati memorizzati vengono trasmessi al reader per verificarne il contenuto;
§ LOCK PAGE: il contenuto della EEPROM viene bloccato, ovvero gli 80 bit diventano accessibili in sola lettura;
§ SELECTIVE READ PAGE: la lettura del contenuto di una pagina di memoria avviene trasmettendo l’indirizzo della pagina e l’indirizzo
25 selettivo, che deve corrispondere alla parte meno significativa (LSB) dell’identificatore contenuto nella pagina 1. I dati vengono inviati dal transponder solo se vi è una perfetta corrispondenza;
§ SELECTIVE PROGRAM PAGE: la programmazione di una pagina di memoria avviene trasmettendo l’indirizzo della pagina e l’indirizzo selettivo, che deve corrispondere alla parte meno significativa (LSB) dell’identificatore contenuto nella pagina 1. La programmazione avviene soltanto se vi è una perfetta corrispondenza;
§ SELECTIVE LOCK PAGE: per bloccare una pagina deve essere inviato l’indirizzo selettivo insieme all’indirizzo della pagina. Il transponder confronta la LSB dell’identificatore della pagina 1 con l’indirizzo selettivo e se vi è corrispondenza effettua il bloccaggio. Durante la fase di carica il trasmettitore è continuamente attivato dal segnale TXCT- : il circuito dell’antenna, risuonando, genera un campo elettromagnetico che va ad alimentare eventuali transponder nelle vicinanze. Il tempo di carica, che generalmente è di 50 ms, dipende dal tipo di transponder, dal tipo di antenna, dalla distanza tra transponder e antenna, dalla velocità relativa tra i due, ecc...
Il modulo RF non è abilitato alla ricezione in questa fase: il segnale RXCK è disabilitato mentre i dati (RXDT) sono attivi ma privi di significato.
Quando il trasmettitore viene disattivato, il transponder inizia ad inviare i dati ed ha inizio la fase di lettura/scrittura.
Durante la fase di lettura, che generalmente dura 20 ms, viene disattivato il segnale TXCT-. A seconda del tipo di transponder i dati trasmessi differisco nello Start byte, Stop byte, End byte, Read Address byte nel Frame Block Check Characters (Frame BCC).
Un transponder RO trasmette 16 Pre-bit tutti uguali a 0, lo Start Byte composto da 8 bit (7EHEX) e gli 80 bit contenenti i dati: di questi 64 bit
26 contengono il codice identificativo unico e 16 bit servono per la protezione dei dati (Data BCC). Trasmessi i dati viene inviato lo Stop byte (uguale in questo caso allo Start byte) e 16 End bit tutti uguali a 0, di cui 15 vengono analizzati da un modulo di controllo. Terminata la trasmissione della trama, il transponder scarica la capacità (fig. 1.13).
Figura 1.14 Formato dei dati trasmessi da un transponder accessibile in sola lettura
Nel caso in cui il transponder che trasmette i dati sia di tipo R/W, cambiano lo Start byte, lo Stop byte e gli End bit, che devono essere uguali ai 15 bit meno significativi dei dati trasmessi (fig. 1.14).
Figura 1.15 Formato dei dati trasmessi da un transponder accessibile in lettura e scrittura
Se il transponder che trasmette i dati è di tipo Multipage R/W, la trama è uguale a quella del transponder RO tranne che nella parte finale, in cui compare l’indirizzo della pagina selezionata e la protezione per i dati (Read Frame BCC) (fig. 1.15).
27 Figura 1.16 Formato dei dati trasmessi da un transponder multipage
I 16 Pre-Bit tutti uguali a zero, inviati all’inizio della fase di lettura quando TXCT- passa ad un livello alto, servono per dare il tempo necessario al modulo RF (Waiting time) di portare il circuito in modalità di ricezione. In questo frangente i dati RXDT sono privi di significato. Con la prima transizione di RXDT da 0 ad 1, che avviene con la ricezione del secondo bit dello Start byte, il modulo RF sincronizza il suo clock (RXCK) e i suoi dati (RXDT). Gli 8 bit dello Start byte vengono memorizzati per identificare il tipo di transponder che trasmette i dati. Inizia quindi la ricezione della trama completa che contiene codice identificativo, eventuale indirizzo della pagina di memoria e tutti i bit necessari alla verifica dell’integrità dei dai.
28 VALUE (HEX) DESCRIPTION BIT RO R/W MPT/SAMPT Pre Bit 16 0000 Start Byte 8 7E FE 7E
Read Data 80 Data + Data BBC
Stop Byte 8 7E FE /
End Bit 16 0000 Data /
Read Address 8 / / Page Address
Read Frame BCC 16 / / Frame BCC
Tabella 1.6 Trame inviate dai diversi tipi di transponder in un ciclo di lettura
La fase di scrittura, che è sempre preceduta da una fase di carica, viene utilizzata per trasferire comandi, indirizzi e dati al transponder, in modo da attivare certe funzioni. I dati vengono inviati dal modulo RF attivando e disattivando il trasmettitore mediante l’ingresso TXTC-. Un bit ha una durata tipica, indipendentemente dallo stato logico, di 2 ms. I dati vengono memorizzati in un registro a scorrimento presente sul transponder e soltanto durante la fase di programmazione, che ha una durata di 15 ms ed avviene immediatamente dopo la fase di scrittura, vengono trasferiti nella EEPROM. Durante la fase di programmazione il campo emesso dal reader deve essere continuo ed avere un’ampiezza sufficientemente elevata: è per questo motivo che generalmente la distanza massima per la programmazione risulta il 30% inferiore rispetto a quella della lettura.
29 Il formato dei dati trasmesso dal modulo RF varia a seconda che il transponder sia R/W oppure un MPT. Nel caso più semplice, di transponder R/W, la trama inizia con due byte che servono a garantire l’accesso in scrittura, la Write Keyword (BBHEX) e la Write Password (EBHEX): se non vengono
riconosciute viene inibito l’accesso alla scrittura. Seguono i dati veri e propri (Write Data) comprensivi di codice identificativo e Data BCC. La trama termina con la trasmissione della Write Frame (0300HEX). La successiva fase di
programmazione ha luogo se vengono riconosciute la Write Keyword, la Write Password, se i dati hanno il giusto numero di bit e il campo a RF ha ampiezza sufficiente da generare una tensione opportuna. Segue una fase di lettura per verificare se i dati scritti sono corretti: nel caso ci siano delle differenze viene ripetuto tutto il ciclo di carica-scrittura-programmazione-lettura.
Figura 1.19 Formato dei dati inviati dal reader nella fase di scrittura ad un transponder R/W
Nel caso di MPT o SAMPT la memoria è organizzata in più pagine, ognuna delle quali contiene i dati di identificazione e di protezione: per effettuare una qualsiasi funzione il modulo RF dovrà inviare l’indirizzo della relativa pagina al transponder e nel caso di SAMPT anche quello selettivo. Nel caso venga effettuata una lettura senza specificare nessun indirizzo, il transponder invia il contenuto della prima pagina di memoria.
30 Figura 1.20 Formato dei dati per la funzione Program Page
Figura 1.21 Formato dei dati per la funzione Selective Program Page
Oltre a leggere e scrivere i dati sul transponder, adesso c’è anche la possibilità di bloccare pagine specifiche e renderle accessibili soltanto in lettura, inibendo la scrittura di nuovi dati, semplicemente inviando l’apposito comando negli Write Address. Anche in questo caso c’è da distinguere tra i MPT e SAMPT, dove nel secondo caso deve essere inviato anche l’indirizzo selettivo.
31 Se più lettori stanno utilizzando la stessa area, può accadere che non si riesca ad attivare un transponder in quanto risulta già occupato in un’altra comunicazione. C’è anche il problema che la risposta del transponder viene coperta dal campo di attivazione dell’altro reader e quindi i dati trasmessi risultano illeggibili. Nasce quindi l’esigenza di effettuare una sincronizzazione tra le varie unità di lettura, realizzabile mediante una procedura software.
I moduli RF dotati di uscita RXSS- sono in grado di sincronizzarsi in modo wireless: se il campo ricevuto all’antenna supera una certa soglia il segnale si attiva e indica la presenza di altre unità.
Figura 1.23 Ciclo di lettura completo di sincronizzazione
Nella fase iniziale è stato aggiunto un tempo per la sincronizzazione, la cui durata è tipicamente di 20 ms, in cui avviene la ricerca di altre unità. Se ne viene rilevata la presenza, il ciclo di lettura viene ritardato fino ad un massimo di 70 ms per permettere all’altra unità di terminare il suo. Durante questo periodo viene continuamente controllato il segnale RXSS- : fino a quando risulta attivo il reader rimane in attesa, al momento che non è più attivo passa in modalità lettura sfruttando la carica del transponder effettuata dall’altra unità, quindi i due lettori ricevono contemporaneamente i dati.
Durante la fase di scrittura, il campo emesso dal trasmettitore del reader è modulato PWM ed il tempo necessario alla fase di scrittura eccede il limite massimo di attesa, quindi può capitare che il reader inizi un ciclo di lettura generando un’interferenza tra i due segnali. Occorre quindi intervenire su una opportuna sequenza di controllo che eviti il verificarsi dell’evento.
32 Per l’utilizzo nel settore Automotive sono stati sviluppati circuiti in tecnologia CMOS che integrano tutte le funzioni di trasmettitore/ricevitore in un singolo chip. Sono collegati ad un’antenna per la trasmissione e ricezione del segnale a RF. Il segnale ricevuto viene demodulato in maniera completamente digitale dal circuito e inviato all’unità principale attraverso un’interfaccia di tipo seriale. Il circuito, che funziona con una tensione di alimentazione di 4.5-5.5V, può funzionare soltanto in due modalità: Sending Mode, per caricare il tag ed effettuare un eventuale ciclo di scrittura e Receiving Mode, per effettuare un ciclo di lettura. Al suo interno non sono presenti circuiti per l’individuazione degli errori, ma è solo in grado di modulatore/demodulare (modem) il segnale secondo le specifiche TIRIS. Questo circuito permette di realizzare sistemi molto compatti e dal costo ridotto [14].