77
APPARATO SPERIMENTALE E PIANO DI PROVE
5.1 Introduzione
Il motore utilizzato per la campagna di prove e progettato in un precedente lavoro di tesi [1] è schematizzato in figura 5.1 .
Dalla figura è possibile vedere le varie parti che lo compongono ed in particolare : • Anodo • Isolante • Piastra Anteriore • Boccola • Gruppo Catodico • Piastra Posteriore • Supporto Solenoide
• Connettore Elettrico Anodo • Connettore Elettrico Catodo
78
Fig.5.1:Schema del Motore.
5.2 Il Motore
Il motore sul quale sarà condotta la campagna di prove, utilizza il gruppo catodico dell’Hybrid Plasma Thruster, già impiegato nella precedente campagna condotta al Centrospazio, affinché sia già noto il comportamento del plasma nella zona catodica.
Il gruppo catodico è formato dal portacatodo realizzato in alluminio e dal catodo realizzato in rame (Fig. 5.2).
79
Fig.5.2:Catodo e Portacatodo
Per forzare l’attacco dell’arco nella parte interna del catodo si è pensato di inserirlo all’interno della piastra posteriore, realizzata in macor ( materiale ceramico), che costituisce il fondo della camera di spinta .
La parte cilindrica della camera di spinta è anch’essa realizzata in macor.
L’utilizzo di materiali isolanti come il macor, in luogo del Plexiglass, per la camera di spinta è dovuto all’esigenza di utilizzare materiali più pregiati, che resistano meglio all’erosione, così che nel getto siano presenti quasi esclusivamente particelle di propellente, in modo da conoscere con esattezza la portata e poter calcolare con maggiore precisione il rendimento di spinta.
In figura 5.3 sono riportati sovrapposti la piastra posteriore e la camera cilindrica.
80
Fig.5.3: Piastra Posteriore e Camera Cilindrica in Macor.
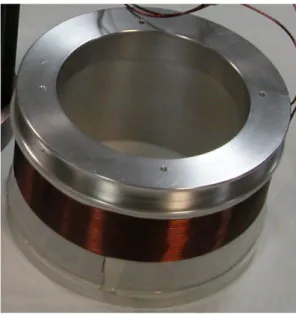
L’anodo anulare ( Fig. 5.4 ) è in rame ed ha un profilo conico per seguire l’andamento del campo magnetico esterno, generato da un solenoide posizionato esternamente al motore su un supporto di alluminio ( Fig.5.5).
L’andamento del campo magnetico applicato è stato simulato in un precedente lavoro di tesi [1].
L’anodo è alimentato da otto connettori che svolgono anche la funzione di collegamento dell’elettrodo al corpo del motore.
81
Fig. 5.5: Supporto Solenoide.
Il supporto in alluminio contiene un solenoide costituito da sette strati di 42 spire di filo di rame doppiamente smaltato per un totale di 294 spire.
Fra il solenoide e il supporto è stato messo un foglio di mailar per garantire l’isolamento fra il supporto in alluminio e l’avvolgimento.
La piastra in plexiglass sulla quale sono fissati i connettori, il gruppo catodico, e il supporto solenoide, funge sia da isolante sia da elemento strutturale.
Gli elettrodi sono collegati tramite appositi connettori in ottone, 2 per il catodo e 8 per l’anodo, al sistema di alimentazione elettrico mentre l’iniettore centrale si interfaccia con il sistema di alimentazione gassoso tramite una valvola a solenoide (SMC modello EVT 137).
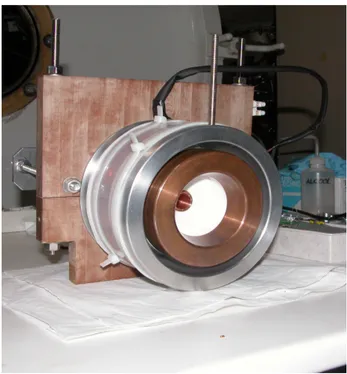
In figura 5.6 e 5.7 sono riportate due fotografie del prototipo realizzato ad ALTA S.p.A.
Si possono riconoscere il catodo centrale in rame sul fondo della camera di accelerazione e il supporto del solenoide che circonda l’anodo anulare in rame.
82
Fig. 5.6 Immagine frontale complessiva del motore
83
5.3 La Bilancia di spinta
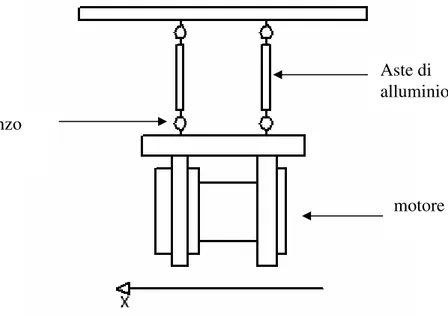
Il motore, all’interno della camera a vuoto, è montato su una bilancia di spinta progettata in un altro lavoro di tesi (Moiola [2]). Uno schema costruttivo della bilancia è riportato in figura 5.8.
Il propulsore è sostenuto da quattro aste di alluminio, vincolate a ciascuna estremità con una lamella sottile di bronzo fosforoso, che si comporta come una molla flessionale permettendo la rotazione dell’asta stessa.
Dal punto di vista cinematico la bilancia si comporta come un quadrilatero articolato, ammettendo movimenti solo in un piano verticale contenente l’asse del propulsore.
Dinamicamente il comportamento è quello di un sistema massa-molla-smorzatore nel quale lo smorzamento è molto piccolo così che in prima approssimazione si può trascurare.
Fig. 5.8 Schema descrittivo della bilancia di spinta
Viste le ridotte dimensioni del motore rispetto all’HPT sperimentato in precedenza è stato necessario apportare alcune modifiche all’interfaccia con la bilancia di spinta.
La bilancia s’interfaccia con il motore tramite una ganascia posteriore di materiale isolante (Ferrozell F18®) costituito da tessuto di cotone immerso in una matrice di resine fenolica , mentre quella anteriore è stata
Aste di alluminio Lamelle bronzo
fosforoso
84
sostituita da un prigioniero in plastica che collega il supporto per il solenoide alla piastra inferiore della bilancia.
La ganascia posteriore serve anche a sostenere il serbatoio di propellente che viene inserito nella camera a vuoto.
Inoltre il motore è stato spostato in modo da fare coincidere la bocca del motore con la fine della piastra inferiore .
La bilancia s’interfaccia con la camera a vuoto tramite una struttura reticolare in acciaio figura 5.9.
Fig.5.9 Schema traliccio
Alla parte inferiore del traliccio viene fissata, mediante quattro bulloni che ne permettono il posizionamento orizzontale, una piastra di alluminio che sostiene la piastra superiore della bilancia.
Per le piastre della bilancia si è optato per l’alluminio, che unisce una buona resistenza meccanica ad un peso specifico ridotto, e che costituisce inoltre un perfetto materiale amagnetico.
L’uso dei supporti antivibrazione si è reso necessario per isolare l’apparato mobile dalle vibrazioni provenienti dalla struttura della camera, dovute principalmente alle pompe rotative per il vuoto e alla normale attività di laboratorio.
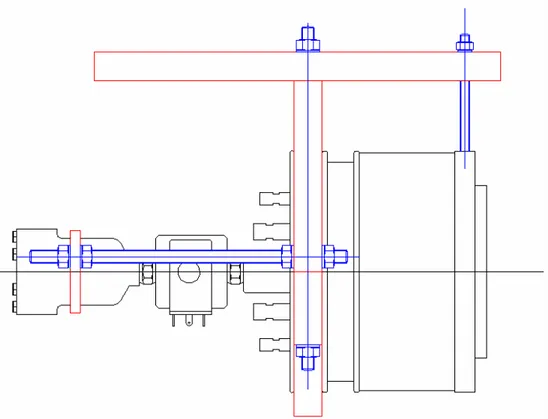
85 In figura 5.10 viene riportato uno schema di montaggio del
propulsore mentre in figura 5.11 viene riportata una foto del motore in camera .
86
87
5.4 Il sistema di alimentazione gassosa.
La sperimentazione sul motore viene eseguita durante fasi di funzionamento pulsato quasi-stazionario, sia perché non è possibile erogare in modo continuo le potenze necessarie, sia perché la camera a vuoto non riuscirebbe a mantenere condizioni di vuoto accettabili, dovendo smaltire quantitativi di propellente superiori alla sua capacità di pompaggio.
Il sistema di alimentazione gassosa è stato quindi progettato in modo da fornire adeguati impulsi gassosi, e in figura 4.12 è riportato uno schema dell’impianto di alimentazione gassosa.
Fig.5.12 Schema del sistema di alimentazione gassosa.
Laboratorio Camera a vuoto Serbatoio di alimentazione Trasduttore di pressione iniettore Valvola a solenoide di alimentazione Polmone Valvola a solenoide di ventilazione Valvola Bombola di Argon
88
Il gas, generalmente Argon, contenuto in una bombola ad alta pressione, dopo essere passato attraverso un riduttore di pressione, viene immesso per mezzo un raccordo a T in un tubo che, attraverso vari passaggi, apporta il gas all’iniettore centrale.
Sulla linea d’ingresso della camera a vuoto è posizionata una valvola a sfera ad azionamento manuale, attraverso la quale si controlla l’immissione del propellente nel serbatoio di acciaio inox da 5 litri posizionati all’interno della camera a vuoto.
Sul serbatoio è montata una valvola di ventilazione a solenoide utilizzata per impostare una ben determinata pressione all’interno dei serbatoi stessi (misurata mediante un’apposita sonda di pressione).
La funzione del serbatoio è quella di regolare la portata del
propellente nel motore. Infatti, stabilire una certa pressione nel serbatoio significa ottenere una ben determinata portata di propellente.
Dopo essere uscito dal serbatoio principale il gas arriva in un serbatoio più piccolo posto subito prima delle valvole di alimentazione e avente la funzione di mantenere costante la portata di propellente durante la fase impulsiva di funzionamento del motore.
Per la determinazione dei valori di portata di propellente durante le prove di sparo, si sono utilizzati i risultati di una operazione di calibrazione riportati nel lavoro di tesi di Marco De Tata [3].
Tale calibrazione ha portato all’ottenimento di una retta di calibrazione definitiva.
Pressione Serbatoio = 2325.6 * Portata + 83.72 (5.1) Dove la portata è espressa in mg/sec mentre la pressione del serbatoio è in millibar.
89
5.5 Il Sistema di alimentazione elettrica
Il sistema di alimentazione elettrica deve essere in grado di fornire la potenza necessaria per generare un gradino di corrente di ampiezza prefissata della durata di qualche millisecondo (tipicamente 5 ms) e deve anche fornire la corrente per alimentare il solenoide utilizzato per generare il campo magnetico applicato esternamente.
Per quanto riguarda la potenza necessaria al motore si utilizza un apposito sistema di condizionamento in grado di accumulare energia elettrica da un dispositivo di ricarica e di rilasciarla all’istante desiderato nella forma di un gradino di corrente di ampiezza e durata voluti.
L’impianto che assolve a questo compito e che è stato utilizzato nelle sperimentazioni è un’apposita rete formatrice di impulsi (Pulse Forming Network, PFN), costituita da un insieme di condensatori e induttanze che ricreano, tramite la sovrapposizione di più impulsi sinusoidali, il gradino di corrente necessario.
Una visione complessiva della PFN è riportata in figura 5.13.
Per l’alimentazione del solenoide è stata utilizzata una rete di quattro condensatori elettrolitici Kendeyl K01 con una capacità di 10000 µF ognuno, progettata da Cesari [4] e implementata nel presente lavoro in modo da facilitarne l’utilizzo continuativo durante le fasi di
sperimentazione.
La carica avviene collegando ai capi della rete un alimentatore regolata alla tensione a cui si vogliono portare i condensatori.
Raggiunta la carica desiderata, i condensatori vengono fatti scaricare sul solenoide attraverso la chiusura di un interruttore SCR pilotata dal segnale di trigger proveniente dalla PFN.
Un opportuno fusibile inserito sul circuito di scarica protegge da eventuali sovracorrenti, mentre un diodo interviene in caso di correnti inverse.
Completa il circuito una resistenza di sicurezza, pilotata manualmente tramite un comune interruttore a due posizioni, sulla quale far scaricare i condensatori durante le fasi di in operatività.
In figura 5.14 si può vedere l’interno dell’unità a condensatori di alimentazione del solenoide dove è possibile riconoscere alcuni degli elementi illustrati.
90
Fig.5.13 La PFN del Centrospazio.
91
5.6 La sequenza di comandi per l’innesco
Durante tutti gli esperimenti condotti nel presente lavoro si è utilizzato un ambiente a pressione di circa 10-4 mbar e una durata della scarica di 5 ms.
Per ottenere il funzionamento pulsato quasi-stazionario del motore in questo lasso di tempo sono necessarie alcune operazioni preliminari, da ripetere prima di ogni sparo:
o Verifica del livello di vuoto, tramite il controllo dell’indicatore del trasduttore di pressione della camera vuoto, che non deve mai allontanarsi dai 10-4 mbar;
o Carica della PFN alla tensione desiderata, tramite un apposito pannello di controllo posto nelle vicinanze della camera di prova. Il tempo richiesto per l’operazione è di poche decine di secondi;
o Carica della batteria di condensatori se è richiesta la presenza del campo magnetico esterno. Questa operazione viene eseguita collegando ogni volta la scatola dei condensatori ad un alimentatore a media tensione.
o Preparazione degli oscilloscopi in condizione di stand-by per l’acquisizione automatica dei segnali.
Non appena eseguite queste operazioni si può eseguire l’esperimento e far funzionare il motore.
L’innesco avviene tramite la pressione di un apposito tasto di sparo, il quale invia un impulso a gradino di ampiezza +5V a tutte le apparecchiature collegate.
La concatenazione degli eventi seguente alla pressione del pulsante di sparo è la seguente:
o Apertura delle valvole a solenoide poste a monte degli iniettori di propellente;
92
o Innesco dell’SCR che chiude il circuito di scarica dei condensatori sul solenoide del motore con un ritardo rispetto all’apertura delle valvole, pilotato da un apposito retarder, di 15 ms;
o Innesco del relè per lo sblocco del motore con un ritardo rispetto all’apertura delle valvole, pilotato anch’esso da un apposito retarder di 10 ms;
o Innesco dell’Ignitron e chiusura del circuito della PFN che provoca la scarica tra gli elettrodi con un ritardo di 20 ms sempre dall’apertura delle valvole..
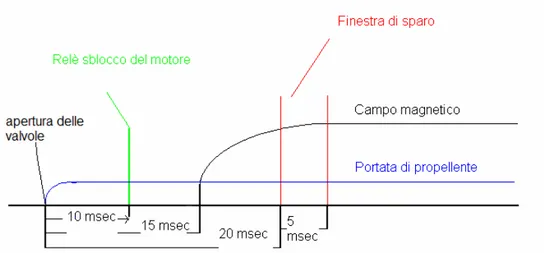
In figura 5.15 è rappresentato uno schema della sequenza di scarica:
Fig. 5.15 Sequenza di scarica
I vari ritardi sono stati ottenuti dal confronto fra i segnali di attivazione delle valvole, i segnali forniti dalle sonde di pressione e il segnale di campo magnetico.
In figura 5.16 si riporta un tipico segnale di attivazione delle valvole e un segnale della sonda di pressione del motore.
In figura 5.17 si riporta un tipico segnale del campo magnetico e della corrente nel solenoide.
93
Fig.5.16 Segnale valvola e sonda pressione del motore.
Fig.5.17 Segnale campo magnetico e corrente nel solenoide.
94
5.7 Piano di prove
Sono state effettuate due serie di prove, la prima serie utilizzando un catodo di lunghezza pari a 46 mm, denominato catodo corto; la seconda serie usando un catodo di lunghezza pari a 56 mm, denominato catodo lungo.
La sostituzione fra i due catodi è stata fatta perché nel caso di catodo corto il motore presentava dei problemi di accensione.
Di seguito si fornisce uno schema riepilogativo delle prove effettuate e delle condizioni investigate.
Il propellente utilizzato è sempre Argon, e la durata dell’impulso è di 5 msec.
5.7.1 Piano di prove a catodo corto
Nella serie di prove a catodo corto sono state prese in esame tre campagne di prove:
o Campagna n°1: eseguiti 54 spari totali di cui 18 a 100mg/s, 18 a 200mg/s e 18 a 300mg/s, con campo magnetico esterno nullo e cariche della PFN variabili fra 600V e 1100V. o Campagna n°2 : eseguiti 39 spari a 200mg/s con campo
magnetico esterno pari a 50mT e cariche della PFN variabili fra 600V e 1100V.
o Campagna n°3 : eseguiti 21 spari a 300mg/s con campo magnetico esterno pari a 50mT e cariche della PFN variabili fra 600V e 1100V.
5.7.2 Piano di prove a catodo lungo
In questo caso sono state eseguite 4 campagne di prove utilizzando cariche della PFN variabili fra 600V e 1100V:
o Campagna n°1 : eseguiti 35 spari a 100mg/s con campo magnetico esterno nullo.
o Campagna n°2 : eseguiti 90 spari, di cui 30 a 100mg/s con campo magnetico esterno di 50 mT; 30 a 200mgs con campo magnetico esterno nullo e 30 a 200mgs con campo magnetico esterno di 50 mT.
95 -0,2 0 0,2 0,4 0,6 0,8 1 -0,002 0 0,002 0,004 0,006 0,008 0,01 0,012 segnale anodo segnale catodo segnale corrente intervallo intervallo
o Campagna n°3 : eseguiti 30 spari a 100mg/s con campo magnetico nullo.
o Campagna n°4 : eseguiti 240 spari, di cui 60 a 100mg/s con campo magnetico esterno di 100mT; 60 con campo magnetico esterno di 100mT utilizzando un nuovo settaggio; 60 a
100mg/s con campo magnetico a 50 mT; 60 a 100mg/s con campo magnetico nullo.
Queste prove sono state eseguite con l’intento di confrontare i risultati della spinta ottenuti con il blocco magnetico e senza Per quanto riguarda l’acquisizione dei segnali di corrente e tensione avviene tramite una sonda ad effetto Hall inserita sul circuito di
alimentazione primario e due sonde TEKTRONIX P6015 collegate ad anodo e catodo.
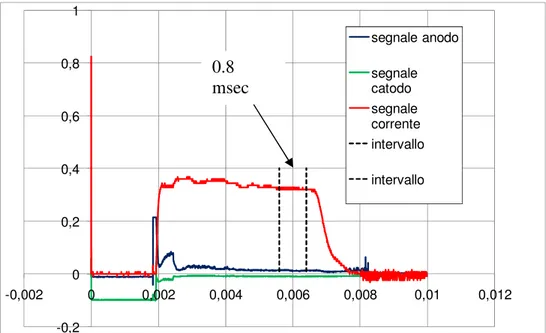
In figura 5.1 sono riportati un esempio di segnale di corrente e un esempio di segnale di tensione.
Fig 5.18 Corrente e tensione con m=100mg/s, PFN=600V, B=0mT
0.8 msec
96
Partendo dai segnali memorizzati dagli oscilloscopi, si convertono i valori rilevati dalle sonde, dell’ordine dei mV, nei loro valori reali.
A questo punto si vanno a identificare i valori medi della corrente e dei potenziali in un opportuno intervallo della fase stazionaria dell’impulso, pari a 0.8 msec ( si veda fig 5.18).
RIFERIMENTI
[1] Chiricò Serena, “Progetto di un propulsore MPD a campo applicato di bassa potenza”, Tesi di laurea in ingegneria aerospaziale, 2004-2005.
[2] Moiola Walter “Progetto e realizzazione di una bilancia di spinta per un motore MPD”, Tesi di laurea in ingegneria aerospaziale, 1999. [3] De Tata Marco “ Studio sperimentale di una tecnica di soppressione
di instabilità MHD in motori MPD”. Tesi di laurea in ingegneria aerospaziale, 2007.
[4] Cesari Ugo “Studio e Caratterizzazione sperimentale del campo magnetico apllicato in un propulsore MPD”