CAPITOLO IV
SIGNAL PROCESSING E IL CLASSIFICATORE “CUBE”
4.1 INTRODUZIONE.
Il lavoro finale presentato, avvalendosi dell’hardware descritto nel precedente capitolo, ha avuto due intenti principali:
1. L’estrazione dal segnale EMG di superficie di parametri discriminanti il movimento (features) e il conseguente loro utilizzo per la costruzione di un classificatore di movimenti. 2. La realizzazione di un’interfaccia software real-time che, implementando il particolare
classificatore, realizzasse il controllo, basato sull’elettromiografia, di un cursore in uno spazio di lavoro sullo schermo di un personal computer.
Il primo punto è l’oggetto del presente capitolo, mentre il secondo sarà affrontato nel prossimo, dove saranno altresì riportati i risultati della validazione del classificatore messo a punto.
La prima fase è consistita nel fissare le specifiche di condizionamento del segnale, per poi passare alla scelta del protocollo di acquisizione, proseguendo, quindi, attraverso la valutazione dei parametri caratteristici dell’EMG riconosciuti in letteratura e l’individuazione di nuovi parametri candidati a far parte delle features della classificazione. Una volta ridotto il set di features a quelle meglio caratterizzanti i movimenti indagati, si è proceduto a mapparlo in un spazio dei tre canali di acquisizione, dove a ciascuno dei 4 movimenti è risultato associato un pattern (modello) in maniera univoca. Il classificatore è stato battezzato con il nome di “CUBE”, dalla forma a parallelepipedo delle classi di discriminazione costruite nello spazio dei canali.
4.2 L’ANALISI DEL SEGNALE.
4.2.1 Premessa.
Il segnale mioelettrico volontario è alquanto irregolare ed è inquadrato nell’ambito dei segnali stocastici (Cap. I). Esso contiene numerose armoniche che vanno da 10-20 Hz a 400-450 Hz per il segnale raccolto con elettrodi cutanei. Il segnale è per sua natura non stazionario, pertanto, tutti i suoi parametri e le sue proprietà statistiche variano nel tempo. Tuttavia, considerando tratti di segnale, chiamati brani o epoche, della durata di 0.5-1 s, se le variazioni sono lente rispetto ai periodi di osservazione, il segnale è considerato stazionario a breve termine, cioè stazionario all’interno di ogni epoca. Questo artificio matematico consente l’applicazione delle tecniche di analisi dei segnali stazionari (ad es. Fourier) non alterando i risultati di tale analisi sulla singola epoca. I segnali trattati nel presente lavoro di tesi sono stati analizzati individuando un’unica epoca di osservazione, della durata di 1 s, con una tecnica, basata sul calcolo dell’istante di attivazione muscolare (onset), che sarà descritta più avanti, nella sezione riguardante l’estrazione dei parametri caratteristici del segnale EMG.
4.2.2 Il condizionamento del segnale.
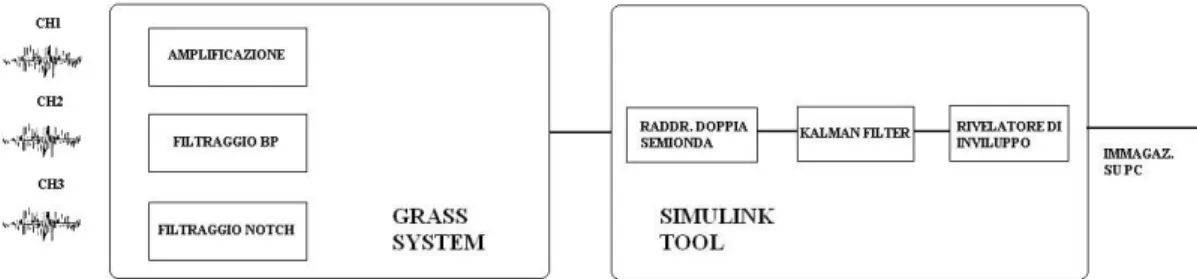
La Fig. 1 schematizza il blocco di condizionamento del segnale, dall’acquisizione all’immagazzinamento per la successiva elaborazione offline.
Figura 1.Schema a blocchi del sistema di condizionamento del segnale EMG cutaneo.
Il modulo Amplificatore GRASS, che riceve in ingresso i segnali prelevati dai tre elettrodi differenziali sulla cute dell’utilizzatore, è stato impostato per effettuare le seguenti operazioni:
1. Amplificazione pari a 10000.
2. Filtraggio passa banda (BP) tra 30 Hz e 300 Hz.
3. Filtraggio elimina banda (notch) intorno a 50 Hz, per eliminare il rumore di rete. Le specifiche appena elencate sono visibili nella schermata dei settings del GRASS in Fig. 2.
Figura 2. I settings del sistema GRASS per il condizionamento del segnale EMG.
Mediante l’utilizzo del tool Simulink della Mathworks™ è stato implementato il modello dello stadio di elaborazione, in cui un modulo analog input è stato impostato per la conversione A/D dei segnali EMG attraverso la scheda NI, a 12 bit di risoluzione, con un periodo di campionamento T di 0.0005 s, ovvero con una frequenza di campionamento di 2000 Hz (2000 campioni/s). Il modello esegue il raddrizzamento a doppia semionda del segnale, il filtraggio con filtro di Kalman ed infine l’estrazione dell’inviluppo del segnale. Si è scelto di lavorare sugli inviluppi dei segnali EMG per avere un segnale più intelligibile, facilmente interpretabile rispetto all’esecuzione del movimento, in quanto l’ampiezza del segnale EMG risulta dipendere dal livello di contrazione muscolare. Per il
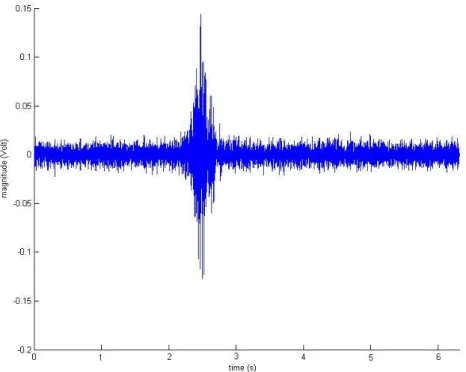
raddrizzamento è stato utilizzato, nel modello Simulink, un modulo che applica la funzione ‘valore assoluto’ ai campioni del segnale; il filtro di Kalman è stato implementato programmando ad hoc un’embedded function di Simulink; per l’estrazione dell’inviluppo si è ricorsi a un modulo Simulink che implementa un filtro digitale IIR passa basso di Butterworth del 5° ordine con frequenza di taglio a 10 Hz. In Fig. 3 e 4 sono mostrati, rispettivamente, un tipico segnale acquisito dall’hardware (Fig. 3) e lo stesso segnale dopo l’elaborazione software (Fig. 4).
Figura 3. Segnale EMG di superficie acquisito dall’hardware.
4.2.3 Il filtro di Kalman.
In elettromiografia le caratteristiche del rumore elettrico sono diverse e possono essere riassunte in:
1. Rumore intrinseco nell’equipaggiamento elettronico. Generato da qualsiasi strumento
elettronico, ha una frequenza da 0 a diverse migliaia di Hz. Non può essere eliminato. Può essere ridotto ricorrendo a componenti di alta qualità.
2. Rumore ambientale. Dovuto a fonti di radiazioni elettromagnetiche, praticamente
impossibile da evitare, ha frequenza dominante alla frequenza di rete (50 Hz) ed ampiezza da 1 a 3 volte quella del segnale EMG.
3. Artefatti di movimento. Causati essenzialmente dall’interfaccia elettrodo-pelle e dalle
connessioni degli elettrodi, possono essere ridotti dall’uso di una circuiteria e di un set-up appropriati. Il range frequenziale va da 0 a 20 Hz.
4. Instabilità intrinseca del segnale. L’ampiezza è alquanto casuale in natura. Il range
frequenziale 0-20 Hz è particolarmente instabile, quindi è raccomandabile rimuoverlo. Nello studio condotto, il range 0-20 Hz del segnale è stato filtrato (la banda estratta è, infatti, 30-300 Hz), come suggerito nel punto 4. Il sistema GRASS, appositamente progettato per la registrazione di segnali biologici, ha garantito sui punti 1 e 2. La qualità di buona aderenza degli elettrodi impiegati e l’accoppiamento con gel altamente conduttivo hanno apportato un ulteriore miglioramento nel segnale in accordo al punto 3. Ciò nonostante, con l’obiettivo di aumentare ulteriormente il rapporto segnale-rumore, intervenendo sul rumore residuo preservando l’informazione, è stato applicato ai segnali EMG di superficie registrati un filtro di Kalman discreto. Il filtro di Kalman è un efficiente filtro ricorsivo che valuta lo stato di un sistema dinamico a partire da una serie di misure soggette a rumore. Per le sue caratteristiche intrinseche è un filtro ottimo per rumori e disturbi agenti su sistemi gaussiani a media nulla. Il filtro di Kalman richiama il problema più generale della stima dello stato del processo tempo discreto che è governato da equazioni differenziali stocastiche
n R x∈ 1 1 1 1 1 − − − − − + + = k k k k k k A x B u w x
La stima viene effettuata per mezzo di successive misurazioni m R z∈ tali che 1 1 1 1 − − − − = k k + k k H x v z
dove descrive il modello legando lo stato al tempo k con lo stato al tempo k-1; lega gli ingressi con lo stato al tempo k; lega lo stato alla misura . Le variabili casuali e sono, rispettivamente, il rumore di processo e il rumore di misura e sono assunti come indipendenti, bianchi e con distribuzione di probabilità normale.
1 − k A Bk−1 1 − k u Hk−1 zk−1 w v
( )
w N( )
Q p ~ 0,( )
v N( )
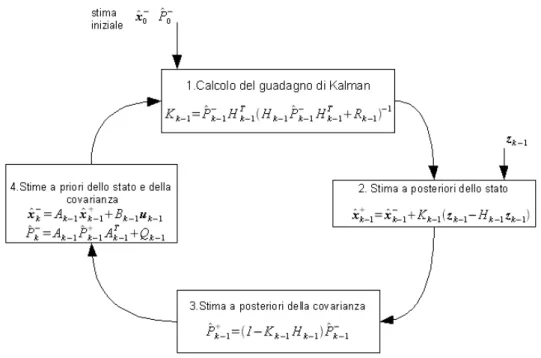
R p ~ 0,Le equazioni del filtro ricadono in due gruppi: equazioni di time update (previsione) ed equazioni di measurement update (correzione). Le equazioni di time update sono responsabili della stima a priori, effettuano la previsione dello stato futuro e della covarianza dell’errore del processo a partire dalla conoscenza delle stime a posteriori al passo precedente e .
− k xˆ P&&k− + −1 ˆk x P&&k+−1
1 1 ˆ ˆ + − − − = + k k k Ax Bu x 1 1 1 1 +− − − − − = + k T k k k k A P A Q P&& &&
Le equazioni di measurement update effettuano una correzione della stima a priori utilizzando la misura , in modo da ottenere una migliore stima a posteriori dello stato e della covarianza dell’errore del processo.
1 − k z xˆk+−1 + −1 k P&&
(
)
1 1 1 1 1 1 1 1 − − − − − − − − − − = + k T k k k T k k k P H H P H R K && &&(
−)
− − − − − − + −1 = ˆ 1+ 1 1− 1ˆ 1 ˆk xk Kk zk Hk xk x(
)
− − − − + −1= 1− k 1 k 1 k 1 k K H P P&& &&La prima operazione durante la fase di aggiornamento per mezzo della misura, consiste nel calcolo del guadagno di Kalman . Il passo successivo prevede la misura del processo utile per la determinazione della stima dello stato a posteriori e il calcolo della stima della covarianza dell’errore a posteriori . La stima a posteriori così ottenuta, serve a predire la nuova stima a priori al passo k. Le definizioni di e . devono essere fatte prima di eseguire il modello di Kalman. La matrice esprime la covarianza del rumore legato all’errore di misura della grandezza . L’incertezza del modello
1 − k K zk−1 + −1 ˆk x + −1 k P&& 1 − k Q Rk−1 1 − k R 1 − k
z
( )
Ak−1 che descrive l’evoluzione del processo x , viene rappresentata nella matrice di rumore . In Fig. 5 è mostrato un quadro completo delle operazioni che compongono l’algoritmo del filtro di Kalman.1 −
k Q
Figura 5. L’algoritmo del filtro di Kalman visto come una procedura ricorsiva in cui le equazioni di time update forniscono
una previsione e quelle di measurement update determinano un miglioramento della stima introducendo l’informazione contenuta nella misurazione.
L’ottimizzazione delle performance del filtro può essere ottenuta regolando i parametri del filtro (covarianza del rumore del processo)e (covarianza dell’errore di misurazione). Nel nostro caso, la matrice è stata fissata pari alla covarianza del rumore di processo nel caso peggiore, che è risultato essere per il movimento di flessione, mentre la matrice è stata considerata costante e pari a: 1 − k Q Rk−1 1 − k Q 1 − k R ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎣ ⎡ ⋅ = − 1 0 0 0 1 0 0 0 1 1 . 0 1 k R
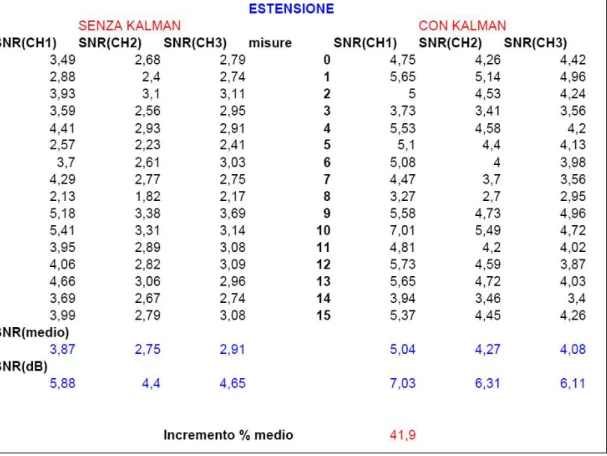
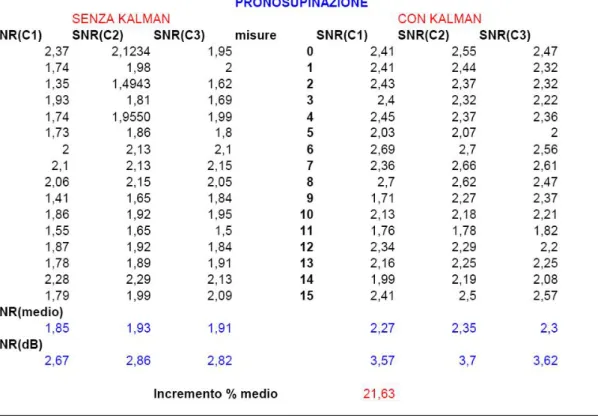
Gli effetti dell’applicazione del filtro di Kalman sono stati valutati stimando il miglioramento percentuale medio del rapporto segnale-rumore (IPM) su un set di 16 acquisizioni registrate per ognuno dei tre movimenti scelti inizialmente per la classificazione che, oltre alle già note estensione e flessione del polso, includeva la pronosupinazione dell’avambraccio (movimento poi escluso per far posto ad adduzione e abduzione del polso, più adatti alla finalità di applicazione real time della tesi). Di seguito, in Fig. 6 -7 e 8, sono riportati i grafici comparativi del filtraggio con Kalman e del segnale originario (row signal) per ciascuno dei movimenti suddetti. Le Tab. 1-2 e 3 riportano, invece, i risultati della stima del SNR percentuale medio sempre sugli stessi tre movimenti.
Figura 7
Tabella 1. Prospetto della stima dell’incremento percentuale medio del SNR dovuto a Kalman sull’ESTENSIONE.
Tabella 3 Prospetto della stima dell’incremento percentuale medio del SNR dovuto a Kalman sulla PRONOSUPINAZIONE.
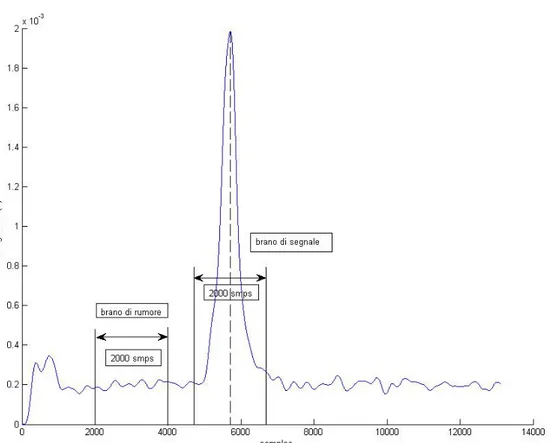
Per il calcolo del rapporto segnale rumore sul tracciato cutaneo registrato, è stato proposto un metodo approssimato basato sull’individuazione, all’interno dell’intero tracciato acquisito, di un brano costituito da solo rumore e di un brano dove si stima sia concentrata gran parte del segnale utile. A tale scopo, l’algoritmo, implementato in una matlab function, ha previsto il computo del rapporto tra la potenza di segnale , calcolata su un brano di tracciato EMG della durata di 1 s (2000 campioni) a cavallo del campione corrispondente alla massima ampiezza del tracciato stesso (istante di massima intensità del segnale utile), e la potenza di rumore , calcolata, escludendo il primo secondo di acquisizione del tracciato, per evitare effetti indesiderati dovuti al transitorio di accensione del sistema di acquisizione, su un brano della durata anch’esso di 1 s, localizzato prima dell’esecuzione del movimento da parte dell’utilizzatore (Fig. 9).
S P N P N S appr P P SNR . =
( )
10 log( .) . appr appr dB SNR SNR = ⋅Per ciascun movimento esaminato, l’incremento percentuale medio del è un parametro mediato sui canali, ovvero rappresenta l’incremento percentuale di rapporto segnale-rumore che mediamente si ha su ciascuno dei tre canali di prelievo. Esso è stato ricavato applicando la seguente formula: . appr SNR
∑
= − ⋅ ⋅ = 3 1 100 3 1 i ci medio ci medio ci medio SNR SNR KSNR IPMDove è il rapporto segnale-rumore medio del set di acquisizioni filtrate con Kalman rilevate sul canale i e è il rapporto segnale rumore medio delle acquisizioni non filtrate rilevate sullo stesso canale. Nel nostro caso l’applicazione del filtraggio di Kalman, per i tre movimenti inizialmente investigati, ha dato come risultati quantitativi:
ci medio KSNR ci medio SNR
IPM = 41.9 % per la ESTENSIONE; IPM = 43.48 % per la FLESSIONE;
IPM = 21.63% per la PRONOSUPINAZIONE.
Figura 9.Illustrazione grafica della tecnica di calcolo del SNR approssimato per il segnale EMG cutaneo.
4.3 IL PROTOCOLLO DI MISURA.
Tutte le registrazioni di segnale EMG cutaneo utilizzate sono state acquisite in accordo al seguente protocollo sperimentale:
a. Fase di preparazione: L’utilizzatore indossa la fascia ad elettrodi tessili e predispone sulla
superficie di questi, a contatto con la cute, il gel altamente conduttivo (Fig. 10).
b. Fase di esecuzione: Il movimento viene eseguito a partire da una posizione in cui l’utilizzatore, seduto, tende il braccio in avanti con il polso a mano chiusa allineato con esso, ad evitare che braccio e avambraccio formino un angolo significativo che ridurrebbe l’intensità dei segnali rilevati (Fig. 11). Le esecuzioni avvengono rapidamente e distanziate
temporalmente di 3-4 s, in modo da non chiamare in causa fenomeni di fatica muscolare che modificano le caratteristiche del segnale e che non sono oggetto del particolare studio. Durante una stessa batteria di esecuzioni, il soggetto mantiene in dosso la fascia senza toglierla e indossarla nuovamente. Tutte le acquisizioni oggetti dell’analisi nella presente tesi, sono state registrate sullo stesso utilizzatore.
Figura 10. Fase di preparazione con applicazione del gel conduttivo.
Figura 11. Posizione iniziale del sistema prima della fase di esecuzione.
4.4 LA CLASSIFICAZIONE.
4.4.1 I parametri caratteristici dell’EMG.
Sotto la già nota condizione di stazionarietà a breve termine, il segnale mioelettrico mantiene inalterati i suoi parametri e le sue proprietà statistiche nella particolare epoca esaminata. I classici parametri cui si fa riferimento in letteratura sono i descrittori d’ampiezza e di spettro. Tali descrittori sono calcolati per un certo intervallo temporale (epoca) del segnale. Se il segnale è casuale, anche i suoi descrittori sono variabili casuali e cambiano da epoca a epoca. Il segnale è
considerato stazionario se i suoi descrittori non presentano tendenze, ma fluttuano intorno a valori medi stabili. Fra i descrittori d’ampiezza, i più comuni sono:
o Valore efficace o root mean square value (RMS). Rappresenta la deviazione standard della distribuzione statistica dei valori del segnale (detta anche densità di probabilità) e coincide con la radice quadrata del valore quadratico medio che rappresenta la potenza elettrica del segnale.
( )
[ ]
∫
= T xt dt T RMS 0 2 1Dove x
( )
t è il segnale e T l’intervallo di osservazione.o Valore rettificato medio o average rectified value (ARV). Rappresenta l’area sotto il tracciato grafico del segnale, divisa per la durata del brano di segnale considerato; questo valore è equivalente alla media dei campioni del segnale nell’epoca considerata.
( )
t dt x T ARV T∫
= 0 1Il descrittore di spettro del segnale mioelettrico comunemente più usato è invece:
o Frequenza media (MNF). Definita come l’ascissa del baricentro dello spettro di potenza.
( )
( )
∫
∫
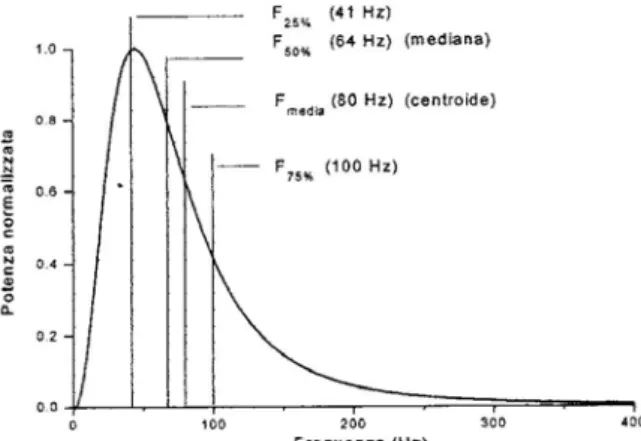
∞ ∞ ⋅ = 0 0 df f P df f P f MNFL’informazione di ampiezza del segnale è legata a quella dello sforzo esercitato dal muscolo. Oltre ad ARV e RMS, nel dominio del tempo, l’ampiezza può essere stimata tramite l’inviluppo del segnale, detto anche, impropriamente, iEMG (integrated EMG). In condizioni dinamiche l’informazione sull’inviluppo permette di stabilire le strategie di controllo a livello di gruppi muscolari. Dall’inviluppo è, infatti, possibile estrarre degli intervalli di attivazione dei muscoli che partecipano al movimento. Oltre a MNF, come variabili nel dominio della frequenza, possono utilizzarsi anche la frequenza mediana (la frequenza che divide lo spettro di potenza in due parti di uguale area), la potenza del segnale (cioè l’area sottesa dallo spettro, equivalente al quadrato dell’RMS), le frequenze che dividono lo spettro in N parti di uguale area (se N=4 si parla di frequenze interquartili, rappresentate insieme a frequenza media e mediana in Fig. 12). Vi sono poi descrittori di forma, che forniscono informazione sulla larghezza e sulla forma dello spettro.
Figura 12.Rappresentazione, sullo spettro, delle frequenze media, mediana e interquartili.
4.4.2 Il parametro teta.
Allo scopo di investigare nuovi parametri del segnale mioelettrico cutaneo utili per la classificazione dei movimenti, è stato introdotto nello studio un parametro cui è stato dato il nome di teta (θ). Per un sistema di 2 elettrodi posizionati su 2 muscoli diversi, tale parametro è definito come la differenza tra gli istanti di attivazione (onsets) dei muscoli coinvolti nell’esecuzione di un movimento. Nel nostro caso, avendo 3 elettrodi, è possibile definire tre parametri teta ai quali è associato lo stato iniziale di attivazione muscolare per il particolare movimento, che sarà presumibilmente diverso per movimenti diversi.
;
2 1
12
1 =θ = onset −onset
θ θ2 =θ13 = onset1−onset3 ; θ3 =θ23 = onset2−onset3 .
La procedura di determinazione dell’onset del segnale EMG non è ancora stata standardizzata. In generale, l’onset può essere determinato qualitativamente attraverso una semplice analisi visiva del tracciato di interferenza, oppure quantitativamente ricorrendo ad un codice di programmazione per personal computer. Nella presente trattazione, si è fatto riferimento al metodo computazionale di Richard P. Di Fabio [40]. Esso prevede, in primo luogo, che si consideri un segmento del segnale precedente l’inizio di qualsiasi perturbazione, dove ci sia solo rumore; che è denominato baseline reference. Nel caso specifico, considerando finestre di registrazione dell’ordine di 6 secondi (12000 campioni), come baseline reference si è scelto un segmento di 500 campioni (250 ms) dopo i primi 3000, che vengono scartati per considerare che il sistema di acquisizione si trovi a regime. In secondo luogo, occorre fissare una soglia (threshold), che normalmente è data dalla somma del valor medio della baseline reference e di 2 o 3 volte la deviazione standard della stessa, nel nostro caso:
threshold = mean( baseline reference) + 3dev.st(baseline reference).
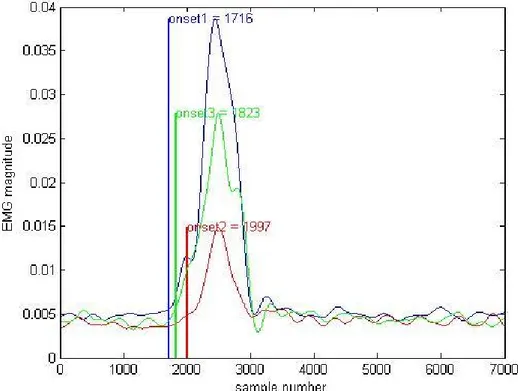
Infine, l’identificazione di un istante di onset è basata su due condizioni: l’ampiezza corrispondente del segnale EMG (valore del campione) deve trovarsi al di sopra della soglia e deve rimanerci per un certo periodo di tempo. Secondo Di Fabio, questa durata è solitamente pari a 25 campioni consecutivi per il dato periodo di campionamento, mentre nel nostro caso è pari a 50. In Fig. 13 è rappresentata una terna di inviluppi di segnali EMG registrati dalla fascia ad elettrodi tessili durante l’esecuzione di un movimento di estensione del polso con indicati i rispettivi onset calcolati secondo la tecnica appena descritta.
Figura 13. Rappresentazione degli onset calcolati col metodo Di Fabio sugli inviluppi dei segnali provenienti dai tre elettrodi tessili
durante l’estensione del polso. Gli inviluppi sono rappresentati eliminando i primi 3000 campioni.
4.4.3 L’estrazione dei parametri dal segnale EMG.
L’individuazione dell’onset del segnale EMG, oltre a consentire il calcolo dei parametri teta, ha costituito la base per il finestraggio del segnale su cui calcolare gli altri parametri di interesse per la classificazione, rappresentati dai descrittori di ampiezza ARV e RMS e dal descrittore spettrale MNF. La finestra di segnale utile è stata individuata, a partire dall’istante di onset, in un brano di 1 s, ovvero di 2000 campioni (Fig. 14).
4.4.4 La ripetibilità delle misure.
I tre principi di invarianza , la conservazione dell’energia, della quantità di moto e del momento angolare, che la Natura offre a chiunque si appresti a studiarla, assicurano allo sperimentatore tre rispettive qualità delle misure effettuate: l’invarianza nel tempo, l’invarianza per traslazione spaziale e l’invarianza per rotazione. Pertanto, affinché una misura si possa considerare valida, è necessario che, a parità di condizioni sperimentali, i risultati ottenuti siano gli stessi se la misura viene effettuata in tempi diversi, in laboratori diversi e da operatori diversi. Queste condizioni, con un corretto uso della teoria dell’errore, consentono alla comunità scientifica di confutare o meno i risultati del lavoro altrui e di scambiarli e utilizzarli per ulteriori sperimentazioni. Poiché la registrazione del segnale elettromiografico è notoriamente influenzata da un numero elevato di fattori, il numero di lavori rintracciabili in letteratura che offrano risultati e conclusioni supportate da un corretto uso degli strumenti statistici è decisamente ridotto. Per supportare la messa a punto di un classificatore di movimenti basato su segnali EMG, in questa sede è stato condotto uno studio di ripetibilità su un insieme discreto di parametri estratti dal segnale, per garantire l’affidabilità della misura ed avere a disposizione un metro di valutazione aggiuntivo su quei parametri candidati ad essere discriminanti del movimento. Conformemente al protocollo prima descritto, è stata eseguita una serie di 20 acquisizioni per ognuno dei 4 movimenti da classificare, per un totale di 80 registrazioni di terne di segnali EMG provenienti dalla fascia ad elettrodi tessili. Le 80 misure sono state ripetute sullo stesso soggetto, senza riposizionamento della fascia, una seconda volta nell’arco della stessa giornata; tale analisi della variabilità intra-soggetto prende il nome, in letteratura, di reliability[41]. Come stimatore semplice di ripetibilità intra-soggetto è stato utilizzato l’errore standard sulla media, o SEM, che rappresenta l’errore sulla stima del valore medio. L'errore standard è un valore che è direttamente correlato alla variabilità della misura ottenuta: quanto più piccolo è l'errore standard, tanto più attendibile è il valore statistico calcolato. Il SEM è dato dal
rapporto tra la deviazione standard σ (radice quadrata della varianza) e la radice quadrata del numero di misure N. Dividendo ulteriormente il SEM per il valore medio µ si ottiene il cosiddetto SEM Normalizzato (SEMN), un numero adimensionale che permette di stabilire la percentuale di errore commessa nella misura:
N SEM = σ
µ
SEM SEMN =
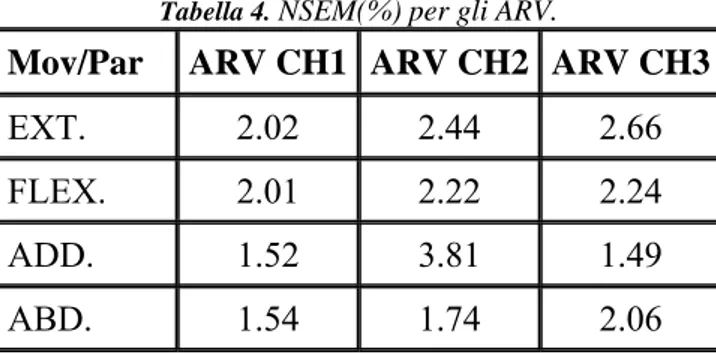
I parametri oggetti del test sono stati gli ARV, gli RMS, i teta e le MNF per i tre canali, per un totale di 12 features. Nelle sottostanti tabelle riassuntive sono riportati i risultati in valori percentuali di NSEM (Tab. 4-5-6 e 7):
Tabella 4. NSEM(%) per gli ARV.
Mov/Par ARV CH1 ARV CH2 ARV CH3
EXT. 2.02 2.44 2.66
FLEX. 2.01 2.22 2.24
ADD. 1.52 3.81 1.49
Tabella 5.NSEM(%) per gli RMS. Mov/Par RMS CH1 RMS CH2 RMS CH3 EXT. 2.26 5.61 3.02 FLEX. 2.14 2.28 5.29 ADD. 1.99 4.97 4.63 ABD. 2.05 4.99 2.03
Tabella 6.NSEM(%) per i TETA.
Mov/Par TETA CH1 TETA CH2 TETA CH3
EXT. 7.47 13.55 9.40
FLEX. 14.99 16.17 11.19
ADD. 21.44 22.59 22.37
ABD. 25.56 7.08 9.82
Tabella 7.NSEM(%) per le MNF.
Mov/Par MNF CH1 MNF CH2 MNF CH3
EXT. 10.33 12.88 15.66
FLEX. 11.92 8.46 11.45
ADD. 11.16 10.14 10.40
ABD. 10.96 8.98 7.64
Dall’ispezione delle tabelle, si evince che i parametri ARV e RMS per tutti e tre i canali e per tutti e quattro i movimenti indagati risultano essere i più ripetibili, in quanto presentano valori di NSEM(%) bassi sia in assoluto, sia riferiti a quelli degli altri parametri teta e MNF , i quali, con alti valori di NSEM(%), si rivelano meno attendibili nella misura. Tali risultati vanno valutati anche in considerazione del fatto che il campione di osservazioni esaminato è di 20 per movimento e per parametro, mentre il test del SEM ha buona affidabilità a partire da un campione di 50-60 osservazioni. In questo senso, la buona ripetibilità degli ARV e degli RMS già su un campione esiguo è un risultato sicuramente confortante e positivo; sugli altri parametri l’ampiezza del campione potrebbe aver avuto un peso maggiore. La scelta di un tale campione di osservazioni limitato è stata dettata dalla necessità di non impegnare la muscolatura in un protratto esercizio che avrebbe portato lo studio nel campo delle contrazioni dinamiche, nonché avrebbe introdotto fenomeni di fatica muscolare che, come detto in altri punti, influenzano le caratteristiche d’ampiezza e spettrali dei segnali EMG registrati, vanificando, così, lo scopo del nostro test.
4.4.5 L’analisi delle Componenti Principali (PCA).
Come supporto alla valutazione, tra le 12 features iniziali scelte per descrivere i movimenti selezionati, di quali siano le più significative per la caratterizzazione dei movimenti stessi, è stato impiegato il metodo di analisi delle Componenti Principali (PCA). Si tratta di una tecnica multivariata efficace e tra le più utilizzate, per la cui teoria si rimanda all’Appendice A di questo testo. La matrice di dati fornita in ingresso alla PCA, è stata composta con 12 colonne, relative alle variabili in gioco e 80 righe, costituite dai valori di tali variabili misurati su un numero di 80 osservazioni totali, 20 per ognuno dei 4 movimenti studiati. In Fig. 15 è proposto il diagramma di ordinamento fondamentale nell’interpretazione della PCA, dove gli assi Y1 e Y2 sono i primi due assi (o componenti) principali. Y1 è combinazione lineare delle variabili (features) a varianza maggiore, Y2 è anch’esso una combinazione di variabili iniziali con alta varianza, ma inferiore a Y1. Nel piano Y1Y2 sono proiettate le posizioni di tutti i campioni che sono i dati in ingresso alla PCA.
Figura 15. Il diagramma di ordinamento della PCA: le posizioni dei campioni in ingresso sono proiettate nel piano degli assi
principali Y1 e Y2. La formazione di gruppi, racchiusi in ellissi costruite intorno al baricentro del gruppo, denota una buona propensione delle variabili in esame alla descrizione dei movimenti analizzati.
La PCA può generare un numero di assi principali in numero al massimo pari a quello delle variabili nello spazio originale dei dati (12 nel nostro caso), ma comunemente ci si limita ai primi due in quanto più ricchi di contenuto informativo, tenendo conto che ogni asse ne possiede meno di quello che lo precede. Sul diagramma di ordinamento si osserva la formazione di gruppi distinti, delimitati da ellissi opportunamente tracciate intorno al baricentro di ogni gruppo. Questo fenomeno assicura sull’efficacia delle prime due componenti principali Y1 e Y2 nel descrivere il set di movimenti. Nella Fig. 16 è mostrato un secondo strumento d’interpretazione dell’uscita della PCA, il Cerchio delle Correlazioni. Sempre nel piano Y1Y2, si considera un cerchio di raggio unitario e per ognuna delle 12 variabili della matrice dati in ingresso viene calcolato il coefficiente di
correlazione con ogni componente principale. Ogni variabile è, quindi, rappresentata nel piano come un punto di coordinate:
(
P,Y1, P,Y2)
k rk rkP
Dove (k = 1, 2, …,12) è la variabile, è il coefficiente di correlazione con la prima componente principale e è il coefficiente di correlazione con la seconda componente principale. Dal Cerchio delle correlazioni è possibile avere un’indicazione grafica di quali variabili determinino maggiormente l’una, l’altra o entrambe le componenti principali, ed anche di quali siano correlate positivamente e quali negativamente.
k P P,Y1 k r 2 ,Y Pk r
Figura 16. Il Cerchio delle Correlazioni della PCA.
4.4.6 Il classificatore “CUBE”.
Dall’analisi precedente del cerchio di correlazione si evince come, delle 12 features iniziali considerate, quelle più vicine al cerchio di raggio unitario e pertanto maggiormente correlate con le due componenti principali individuate, sono quelle contrassegnate dall’1 al 6, corrispondenti, rispettivamente, ai parametri ARV e RMS per i tre canali di acquisizione. Dei parametri teta, l’8 e il 9 (θ13 e θ23) risultano più lontani dal margine della circonferenza, pertanto poco correlati alle componenti Y1 e Y2, mentre la 7 (θ12) è delle tre la più vicina. I parametri MNF (10, 11 e 12) sono
relativamente vicini alla circonferenza unitaria, ma meno degli ARV e degli RMS, dunque con minore indice di correlazione. In sostanza, la PCA afferma che i 3 ARV ed i 3 RMS sono le variabili a più alto contributo informativo relativamente al set di movimenti che si vogliono discriminare, mentre i θ12 e i tre MNF hanno anche loro un certo grado di informazione, inferiore
comunque a quella dei primi sei; θ13 e θ23 hanno invece poco contributo informativo rispetto al fenomeno da caratterizzare. Poiché è filosofia delle PCA anche fornire uno strumento che aiuti a ridurre il numero di variabili descrittive in gioco, e tenendo, poi, anche in conto i risultati di ripetibilità, la decisione finale è stata, pertanto, di prendere in considerazione soltanto le prime sei features, per assicurare l’affidabilità del classificatore ed una certa bontà della misura. Gli ARV e gli RMS sono risultati, quindi, le features sulle quali si è passati a lavorare per la costruzione del nostro classificatore di movimenti umani. Per questo motivo sono state successivamente graficate nello spazio dei 3 canali di acquisizione del nostro sistema una serie di misure di ARV e RMS effettuate su estensione, flessione, adduzione e abduzione del polso, allo scopo di analizzare come le distribuzioni dei valori dei parametri si dispongono nello spazio. Nelle Fig. 17 e 18 sono illustrate le distribuzioni di ARV e RMS rispettivamente, su 20 misure effettuare per ciascun movimento.
Figura 17. Rappresentazione nello spazio dei canali delle distribuzioni di ARV per i 4 movimenti studiati.
Appare ben visibile come la distribuzione delle misure, sia degli ARV che degli RMS, relativa a un determinato movimento sia concentrata in una porzione dello spazio dei canali ben definita (cluster) e come le distribuzioni associate a movimenti differenti individuino dei clusters tra loro disgiunti. Ciò è in accordo con il risultato della PCA, che attribuiva ad ARV e RMS un alto contenuto informativo per la discriminazione del movimento. Per i teta e i MNF, invece, non è possibile individuare cluster disgiunti, dal momento che le distribuzioni delle misure per i diversi movimenti sono concentrate per massima parte in una stessa porzione di spazio (Fig. 19 e 20). Ciò conferma la scelta di escluderli dalla costruzione del classificatore.
Figura 19. Rappresentazione nello spazio dei canali delle distribuzioni dei TETA per i 4 movimenti studiati.
Il passo successivo è stato quello di definire le classi nello spazio dei canali a partire dai clusters individuati dalle distribuzioni delle misure dei parametri ARV e RMS. Le classi sono in numero pari ai movimenti del set da discriminare ed hanno la forma di parallelepipedi, da cui il nome di “CUBE” per il nostro classificatore. Per ogni parametro, una classe è costruita nello spazio dei canali a partire dal valore medio e dalla deviazione standard dei valori del parametro calcolati su una serie di ripetizioni dello stesso movimento e sui tre canali (Pmi e σi; i =1,2,3 indica il canale), definendo, poi, un intervallo di confidenza [Pmi−k⋅σi;Pmi+k⋅σi] per ogni canale (k è una costante moltiplicativa intera). Il procedimento è meglio illustrato nelle Fig. 21 e 22, in cui si vede come, in base alla tecnica del disegno geometrico, partendo dagli intervalli di confidenza dei tre canali, si ottengono sui tre piani cardinali le tre facce principali del parallelepipedo (Fig. 21) che, proiettate dello spazio, intersecandosi, danno luogo alla classe tridimensionale (Fig. 22) del classificatore “CUBE”.
Figura 21. La prima fase della costruzione della classe “CUBE”: dall’intersezione delle proiezioni degli intervalli di confidenza sui
piani cardinali si ottengono le tre facce principali del parallelepipedo. La costante k è posta a 1.
Figura 22. Seconda fase della costruzione: dall’intersezione delle proiezioni nello spazio delle tre facce si ottiene la classe
Le Fig. 23 e 24 mostrano, infine, le classi dei movimenti derivate dalle distribuzioni in precedenza graficate dei valori degli ARV e degli RMS rispettivamente (con k = 1).
Figura 23. Rappresentazione nello spazio dei canali dei CUBE delle 4 classi di movimento per i parametri ARV.
Figura 24 Rappresentazione nello spazio dei canali dei CUBE delle 4 classi di movimento per i parametri RMS..
Il principio di classificazione si basa sul concetto che una generica misura del parametro (sia esso ARV o RMS) rientra nella classe di movimento per cui è soddisfatta, per tutti e tre i canali contemporaneamente, la seguente condizione:
i mi i i mi k P P k P − ⋅σ ≤ ≤ + ⋅σ i=1,2,3
Dove è il valore del parametro misurato sul movimento da classificare ed i è il canale. La condizione può anche scriversi come:
i P i mi i P k P− ≤ ⋅σ i=1,2,3
Per comprendere meglio la tecnica, supponiamo di voler classificare un nuovo movimento appena eseguito, cui corrisponde, ad esempio, la terna di valori del parametro ARV calcolato sui 3 segnali EMG registrati dagli elettrodi cutanei del nostro sistema indossabile. Indicati questi con arv1, arv2 e arv3, il movimento viene associato dal classificatore alla classe per cui valgono contemporaneamente: 3 3 3 2 2 2 1 1 1 σ σ σ ⋅ ≤ − ⋅ ≤ − ⋅ ≤ − k arv arv k arv arv k arv arv m m m
Geometricamente, quanto appena detto corrisponde al fatto che il punto corrispondente alla nuova misura del parametro si trovi all’interno del parallelepipedo della classe.
L’algoritmo finale del classificatore “CUBE” implementato, opera la classificazione del movimento tenendo conto in maniera opportuna del soddisfacimento delle condizioni già viste sia sui parametri ARV che sui parametri RMS. Per una più chiara comprensione, in Fig. 24 è riportato uno schema a porte logiche di un modulo del classificatore che riconosce un generico movimento.
Figura 25. L’algoritmo di classificazione nell’interpretazione a porte logiche.
Il primo stadio di calcolo verifica le condizioni di appartenenza alla classe parallelamente per gli ARV e per gli RMS. L’utilizzo di porte AND comporta che, per ogni parametro, le tre condizioni devono essere simultaneamente verificate sui tre canali. Il secondo stadio fornisce l’uscita del
classificatore mediante un OR delle uscite dello stadio precedente. In pratica, il movimento viene classificato sia che rientri nella classe contemporaneamente per ARV e RMS, sia che ci rientri solo per uno dei due parametri. In tutti questi casi l’uscita U del modulo è settata a 1, quando, invece, il movimento non rientra nella classe per nessuno dei due parametri, U è settata a 0. Il classificatore “CUBE” dispone di 4 moduli identici a quello descritto (Fig. 25), per cui U può essere vista come una variabile a 4 bit e il movimento in uscita è così codificato:
(u3 u2 u1 u0) movimento 1 0 0 0 ESTENSIONE 0 1 0 0 FLESSIONE 0 0 1 0 ADDUZIONE 0 0 0 1 ABDUZIONE
Tutti gli altri valori assumibili da U non codificano un movimento e corrispondono ad un “NON CLASSIFICATO”.