1 L
AS
OSPENSIONEA
UTOLIVELLANTE1.1 Introduzione
Elemento fondamentale della ciclistica di una moto è la sospensione, che ha il compito di filtrare le asperità del fondo stradale e mantenere costante l’assetto del mezzo. Se una moto fosse sprovvista di sospensioni, subirebbe sollecitazioni elevate a causa delle asperità e dalle irregolarità del terreno su cui si muove e il comfort di marcia sarebbe inesistente, annullando la tenuta di strada.
Definiti il telaio e il gruppo motore con il termine di massa sospesa e le ruote (cerchio, gomma, impianto dei freni) come massa non sospesa, l’unione tra queste due parti è garantita dalla sospensione composta da una molla e da un elemento smorzatore, l’ammortizzatore.
Quando una ruota supera un’irregolarità del terreno, questa si solleva e l’elemento elastico della sospensione si comprime immagazzinando energia. In una seconda fase, la molla si estende facendo alzare la massa non sospesa. Segue poi un’ulteriore compressione causata dal peso della struttura del veicolo. Il processo continua con un andamento ondulatorio, fino a quando gli inevitabili attriti lo fanno lentamente terminare. L’ammortizzatore deve controllare e smorzare queste oscillazioni che si ripetono con una precisa frequenza ed ampiezza stabilita dai parametri fisici della sospensione. In questo modo è perciò possibile modulare e modificare il lavoro della molla.
Le molle delle sospensioni sono montate in modo tale da essere sempre un po’ compresse; in tal modo la sospensione non viene mai sollecitata a trazione. Questa compressione iniziale è chiamata precarico.
Variando il precarico si aumenta o si diminuisce la forza minima necessaria per far reagire la molla o, più semplicemente, si varia la soglia superata la quale la sospensione comincia a comprimersi. Questo spiega perché aumentando il precarico si ha la sensazione di avere sospensioni più rigide: in realtà si rendono
funzionamento più secco.
Il sistema tradizionale di regolazione del precarico nei motocicli è costituito da una ghiera dentata “a scatti”, ruotando la quale si può aumentare o diminuire il precarico stesso.
La regolazione, sebbene di facile attuazione richiede tuttavia una certa dimestichezza con la ciclistica.
Figura 1.1 Precarico di tipo tradizionale: ad ogni scatto della ghiera, corrisponde una variazione del precarico.
Quello che si cerca di realizzare con questo lavoro è, invece, un sistema che garantisca il settaggio ottimale del precarico, senza che questo necessiti dell’intervento del pilota.
Ad oggi, solo alcune case costruttrici, come Honda e BMW, offrono soluzioni di tipo semiautomatico su i loro modelli da granturismo.
La Honda Goldwind 1800 dispone di una sospensione posteriore dotata di preselezione del precarico, con possibilità di scelta tra due opzioni: solo pilota
Figura 1.2 Sospensione BMW con precarico regolabile elettronicamente con visualizzazione su display di 3 diverse modalità selezionabili (dall’alto verso il basso):
sport con solo pilota, comfort con pilota e passeggero, normale con pilota e bagagli.
Risulta evidente come, finora, ci si è limitati ad offrire al cliente che acquista una moto (e solo per i modelli più esclusivi) sistemi che permettono di scegliere solo tra alcune soluzioni di precarico predefinite, impostate dalla casa costruttrice e tarate per l’utente medio.
Il nostro lavoro si propone di realizzare un sistema di regolazione per le sospensioni che agisca andando a determinare il precarico ottimo in ogni situazione di viaggio e regolandolo di conseguenza automaticamente, in modo del tutto trasparente al conducente il quale non deve preoccuparsi di selezionare alcunché .
1.2 Definizione del Problema
Per capire ancora meglio che cosa comporta la variazione del precarico assimiliamo, per semplicità, la motocicletta ad un corpo dotato di una sola sospensione e si supponga che stia percorrendo un tratto di strada piana e rettilinea.
Figura 1.3
La forza peso delle masse sospese, pari a F0 , comprime la molla della sospensione fino al valore di x0 . Se ad un certo punto la moto incontra un ostacolo, la sospensione viene compressa fino al punto xM . Poiché l’ostacolo sollecita la moto con una forza pari a FM . A questo punto, la molla tende a riportarsi nella posizione d’equilibrio oscillando intorno alla posizione x0, ma sino al valore x1 o x2 a seconda che la molla sia stata precaricata con una forza F1 o F2 . Da queste considerazioni di intuisce facilmente che con la molla maggiormente precaricata (F2) si raggiunge la condizione iniziale in minor tempo dando, però, la sensazione di una sospensione più rigida.
E’ importante dire che il precarico non deve essere mai superiore al peso statico delle masse sospese perché, se così fosse, le sospensioni funzionerebbero solo per sollecitazioni verticali superiori al valore del precarico, comportandosi invece come corpi rigidi per sollecitazioni inferiori. In queste condizioni l’energia trasmessa dal fondo stradale sarebbe assorbita dallo pneumatico che così
xM x1 x2 x0 F FMM F F00 F F22 F F11 F F
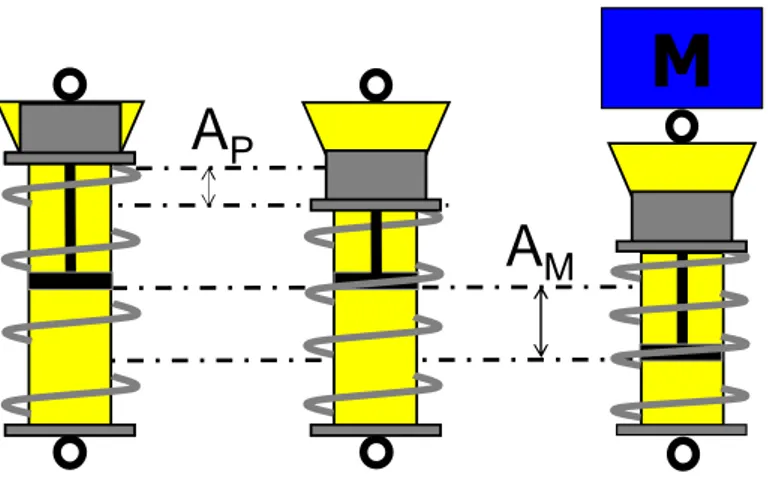
Infatti, poiché questo è sempre inferiore al peso della motocicletta, in condizioni statiche si ha una compressione delle sospensioni e quindi un abbassamento del mezzo. Per comprendere meglio il concetto è necessario riferirsi all’equazione che lega la forza peso, a cui è soggetta la sospensione, alla compressione delle molle:
g M A A k A k F = ⋅ = ⋅( P + M)= ⋅ con:
M: peso statico della moto che può essere calcolato anche con pilota e carburante (masse sospese);
k: costante di rigidità della molla;
AM: accorciamento della molla a partire dalla posizione assunta come zero dovuta al peso;
AP: accorciamento iniziale che s’impartisce alla molla, dovuta al precarico.
M
A
PA
MFigura 1.4 Definizione delle grandezze caratteristiche del sistema.
La corsa complessiva A dell’ammortizzatore, intesa come accorciamento, è data pertanto da: M P A A A= + si ricava: P P M A te A k g M A = ⋅ − =costan −
(AP) si può controllare l’accorciamento della molla AM e quindi l’altezza della motocicletta .
Analizzando l’andamento delle curve corsa/peso per i diversi valori di precarico si può capire come, all’aumentare del peso, aumentando il precarico, sia possibile mantenere invariato il valore di corsa.
Durante la fase di viaggio del mezzo allora è importante regolare il precarico in funzione del peso del pilota e di eventuali passeggero e bagagli presenti sullo scooter in maniera da far lavorare la sospensione intorno al valore di progetto.
1.3 Specifiche di Progetto
Il progetto della sospensione “autolivellante”, si basa su un sistema idraulico con controllo elettronico applicato ad una sospensione posteriore montata al telaio di uno scooter Beverly 500 della Piaggio.
Nel nostro caso l’impianto di sospensione posteriore per il Beverly è formato da
Peso P1 P3 Ap0 Ap1 Ap2 AM AM* P2
Figura 1.5 Curve ideali corsa / peso al variare del precarico.
Figura 1.6 Beverly 500 e particolare sospensioni posteriori.
Il sistema dispone di un dispositivo per la variazione del precarico che permette di precaricare d’ulteriori 40 kg la molla: una pompa, costituita da un motore DC e da una vite senza fine, varia la quantità dell’olio in una camera posta in testa di ciascuna sospensione determinando lo spostamento di un pistone (fino a 20mm di corsa) che, a sua volta, interviene sul supporto superiore della molla. Quando nella camera viene pompato olio, il pistone scende e sposta giù il supporto della molla, che risulterà più schiacciata. Viceversa se il pistone sale (la pompa aspira olio dalla camera), il precarico della molla diminuisce.
veicolo e, se necessario, intervenire sulla sospensione posteriore, regolandone il precarico.
In primo luogo sarà necessario scegliere una serie di sensori che siano in grado fornirci tutte le informazioni che possano tornare utili ai fini del settaggio quali:
1. velocità di crociera, 2. peso sullo scooter,
3. precarico della sospensione posteriore.
Quindi una volta ricevuti i dati, un controllore dovrà essere in grado di capire se intervenire sulla sospensione dello scooter. In tal caso il controllore avrà bisogno di un driver capace di attivare la pompa per la regolazione del precarico.
Tutta la parte elettronica verrà alimentata dalla batteria dello scooter, passando per eventuali reti di protezione.