1. Il Rilievo della Chiesa presso la Badia Camaldolese di Volterra
mediante l'utilizzo di Laser Scanner 3D
1.1 Introduzione
Il presente studio persegue come obiettivo principale il raggiungimento di una metodologia applicativa, relativamente all'acquisizione dati e successiva restituzione grafica, sufficientemente valida al fine di riproporre una ricostruzione grafica digitale della struttura della chiesa e del suo comparto decorativo, comprovata da solidi riferimenti scientifici.
Questa finalità, non ha certo la presunzione di presentarsi come un'innovazione rispetto allo stato dell'arte, ma le metodologie con le quali si è pervenuti al risultato prefissato, attraverso la compartecipazione di più settori disciplinari, hanno costituito un solido fondamento scientifico volto a giustificare le ipotesi ricostruttive.
1.2 Stato dell'arte
1.2.1 Utilità di un modello digitale
Il periodo storico nel quale oggi giorno siamo chiamati a vivere, appare sempre più improntato verso una caratterizzazione informatica delle comunicazioni, dalla telefonia, all' editoria on-line, dai sempre più frequenti corsi e-learning all'industria dell' entertainment.
In questo contesto, appare consolidato da ormai più di un decennio, anche tutto il settore della rappresentazione digitale intesa, non solo in termini di aumentate capacità descrittive delle immagini, ma anche e soprattutto come un innovativo ed indispensabile strumento di conoscenza.
Un modello 3D, derivato da una mirata acquisizione dati, viene quindi inteso come una descrizione fedele e misurabile dell'oggetto in esame ottenuto mediante la rappresentazione fisica delle sue proprietà specifiche di forma, volume e colore. La tipologia di rilievo mediante l'utilizzo di Laser Scanner 3D, rappresenta una frontiera tecnologica che negli ultimi anni è stata sperimentata in diversi campi di applicazione: nell'archeologia, nello studio e nella salvaguardia del patrimonio culturale, nel settore industriale e nelle attività di reverse engineering, vale a dire nella riproduzione di oggetti, macchinari e monumenti già esistenti.
Tuttavia, sebbene questa attività certamente non appaia innovativa, la creazione di un modello tridimensionale digitale resta ancora una procedura estremamente complessa nel suo insieme, sia perché richiede sofisticati strumenti di acquisizione dati e sia perché l'hardware necessario alla computazione di un modello ad alta risoluzione utilizza un elevata potenza di calcolo. Oltre questo, le procedure e le metodologie che definiscono l'oggetto del rilievo e tutte le operazioni necessarie a renderlo utilizzabile nelle modalità richieste dai differenti campi di applicazione, presuppongono comunque l'intervento manuale di un operatore altamente specializzato.
Anche per la primaria fase di acquisizione dati, mediante la ripetizione di una o più scansioni, non esiste una metodologia specifica tale da poter essere replicata in modo indifferenziato per ogni oggetto. Le caratteristiche del manufatto da acquisire indirizzano irrimediabilmente tale scelta: tra queste vi è la complessità della forma e lo spazio occupato, la presenza di fori passanti o di sezioni concave, le caratteristiche fisiche delle superfici in riferimento agli indici di riflessione, rifrazione e assorbimento, come anche la necessità di dover documentare ulteriori attributi del modello, quale appunto il colore.
Infine, non meno importante nella scelta dell'approccio metodologico, la stima dei tempi e dei costi sono parametri che irrimediabilmente influenzano la qualità, la quantità ed il dettaglio del prodotto finito. Escludendo la finalità didattica del presente studio, le operazioni di rilievo e restituzione grafica digitale di un prodotto, presuppongono ancora oggi, figure professionali altamente specializzate, i cui tempi di esecuzione incidono non di poco sul costo per la realizzazione del lavoro.
Va certamente sottolineato che le moderne tecnologie informatiche offrono un supporto tecnico e metodologico, di notevole spessore, ai professionisti del settore, garantendo un elevatissimo apporto tecnico a beneficio di precisione, qualità ed ottimizzazione dei tempi di esecuzione.
1.2.2 I sistemi di scansione 3D
Allo stato dell'arte, esistono diverse tipologie di strumenti dediti all'acquisizione dati per la restituzione di modelli tridimensionali di studio e tutti producono, con qualità, dettaglio e precisione differente, matrici di punti nello spazio.
Operando una prima caratterizzazione sulle diverse tipologie di strumenti per il rilevamento laser, è possibile classificare questi ultimi in due macrocategorie: i sistemi di scansione per contatto e quelli non a contatto.
Gli strumenti a contatto utilizzano una sonda analogica di diametro noto per muoversi sulla superficie dell'oggetto, acquisendone l'informazione in termini di punti nello spazio tattile. Questa procedura, permette di acquisire un prodotto dall'elevato livello di dettaglio, poiché sulla resa finale non influiscono gli indici di riflessione della superficie indagata e perché la densità dei dati raccolti varia in funzione della geometria del manufatto da rilevare.
Il campo di applicazione di un scanner a contatto è indirizzato prevalentemente al rilevamento di piccoli oggetti di cui si ha bisogno di un'accurata precisione. Consistono quindi in contenuti dispositivi, talvolta portatili, dotati di un sensore montato su un mandrino di una fresatrice a controllo numerico, coadiuvato da un software di gestione in grado di governarne i movimenti.
I sistemi non a contatto, utilizzati in ausilio alle attività progettuali, consentono l'acquisizione del dato metrico e materico dell'oggetto da rilevare senza necessità di aderenza fisica, associando una velocità di scansione più performante rispetto ai precedenti.
In termini di morfologia, gli Scanner 3D non a contatto, presentano alcune analogie con le comuni fotocamere, ormai di uso domestico: sono dotati di un campo di vista conico e possono raccogliere informazioni solo dalle superfici che non risultano
occluse. Tuttavia, a differenza delle macchine fotografiche, che assimilano soltanto dati sulle caratteristiche cromatiche di una superficie, lo scanner è in grado di determinare le posizioni spaziali di tutti i punti presenti nel suo cono visivo.
Diverse sono le tecnologie che definiscono questa categoria in ulteriori sub-categorie, di seguito descritte.
Sistemi a triangolazione ottica
Si tratta di strumenti adatti all'acquisizione di oggetti di piccola e media scala, (statue, vasi, ecc...) fornendo dati accurati nell'ordine di poche decine di micron, permettono di realizzare campionamenti molto densi nell'intorno dei 4-10 sample per mm2. Presentano tempi di scansione generalmente molto bassi relativamente alla singola ripresa.
Il principio di misurazione delle coordinate di un punto è analogo al processo di triangolazione che si effettua in topografia. Emettitore e ricevitore del laser si trovano localizzati in due punti differenti. Una lama di luce, emessa dallo scanner, colpisce l'oggetto generando un profilo che viene acquisito da una fotocamera o telecamera.
La posizione spaziale dei punti che appartengono al profilo di luce si ottiene per triangolazione tra scanner, telecamera e oggetto rilevato. L'insieme dei profili paralleli, ottenuti al termine della scansione, fornisce l'informazione necessaria per la realizzazione di un modello tridimensionale.
Il segnale luminoso può essere composto da una o più linee laser (triangolazione laser) o da un pattern di luce (luce strutturata).
Figura 1.1: Esempio di Laser Scanner 3D a triangolazione ottica. Minolta VIVID 910
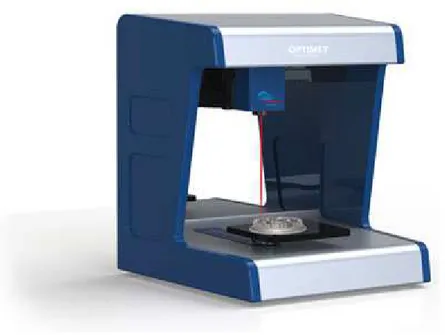
Sistemi interferenziali (conoscopia)
Adatti all'acquisizione di oggetti di piccola scala con piano di lavoro di pochi cm2; basano il loro funzionamento sulla interferenza di frequenze laser, e forniscono accuratezze nell'ordine di micron, permettendo l'esecuzione di campionamenti estremamente densi nell'intorno dei 500 sample per mm2.
I tempi di scansione dipendono dalla caratteristiche meccaniche del sistema adottato per lo scorrimento dello strumento sulla superficie campionata (la misura che viene effettuata di volta in volta è infatti puntuale).
Trovano campo di applicazione nei settori in cui si richiede l'acquisizione di dati per la ricostruzione tridimensionale di piccole superfici, quanto più planari, come ad esempio opere pittoriche.
Figura 1.2: Esempio di Laser Scanner 3D conoscopico. ConoScan 4000 Optimet
Sistemi a tempo di volo
Questa tecnologia calcola la distanza della superficie misurando il tempo trascorso da quando l'impulso laser viene emesso dallo strumento al suo ritorno (round trip) a seguito della riflessione sulla superficie colpita.
La misura del tempo intercorso tra l'emissione e la ricezione del raggio riflesso, l'angolo di inclinazione del raggio stesso emesso rispetto all'asse verticale dello strumento e l'angolo azimutale indicizzato ad un asse orizzontale preso come riferimento, costituiscono l'insieme di coordinate sferiche per l'individuazione tridimensionale dei punti rilevati.
Le coordinate vengono fornite in un sistema di riferimento cartesiano, che ha origine in un punto dello strumento, le quali possono arbitrariamente essere georeferenziate in termini assoluti o relativi mediante l'utilizzo di GPS e stazione totale.
Adatti all'acquisizione di oggetti su larga scala, in ambito architettonico, impiantistico e geologico, forniscono accuratezze di alcuni millimetri (5-10),
permettendo campionamenti molto densi dovuti all'estensione degli spazi da documentare.
Presentano tempi di scansione mediamente elevati, e producono nuvole anche di diversi milioni di punti.
Sistemi a modulazione di fase
Combinano la tecnologia del tempo di volo con la modulazione, permettendo di raggiungere livelli di accuratezza molto più elevati degli strumenti che sfruttano il solo tempo di volo.
Il funzionamento è simile a quello del tempo di volo, ma il pattern illuminante, non è costituito da un singolo raggio, ma da un treno di onde sinusoidali che permette rilevamenti più precisi (1-2mm) a velocità maggiori.
1.3 Metodologie e procedure applicative
1.3.1 Tecnica di rilevamento
Al fine di indirizzare il processo di ricostruzione grafica tridimensionale sullo stato regresso della chiesa, è risultato fondamentale acquisire il dato metrico relativo allo stato di fatto del monumento in ogni suo punto.
L'interesse principale ha riguardato l'ottenimento di un prodotto sufficientemente completo e dettagliato da cui poter estrarne, nel più breve tempo possibile, tutte le informazioni geometriche dell'oggetto rilevato.
Le diverse scansioni effettuate sul campo, hanno quindi permesso l'acquisizione di una serie di nuvole di punti, il cui allineamento, condotto per via geometrica, ha portato alla definizione di un modello completo e dettagliato. Trattandosi di elementi discreti, i dati acquisiti mediante questo tipo di rilevamento hanno dovuto essere ulteriormente reinterpretati, mediante il ricorso a vari software, al fine di generare un modello superficiale ad elevato numero di poligoni, in grado di rispondere quindi alle esigenze dell'utilizzatore.
Tuttavia prima di arrivare alla definizione della mesh1, sono state effettuate diverse operazioni di alleggerimento e filtraggio della nuvola di punti da tutto il rumore presente, dovuto essenzialmente alla divergenza del fascio laser, a problemi nell'individuazione della direzione del fascio stesso e all'eliminazione di dati spuri legati al disturbo della vegetazione.
Superata questa fase, l'utilizzo della superficie poligonale editata, in luogo di sezioni plano-altimetriche e di orto-proiezioni dei prospetti, oltre a definire nel piano quanto acquisito nello spazio, ha costituito quella guida geometrica necessaria allo
1 In computer grafica le mesh sono primitive atte a risolvere con estrema efficienza i processi di visualizzazione delle forme modellate: sono strisce di triangoli o maglie di poligoni con le quali si rende possibile la rappresentazione di qualsiasi forma geometrica complessa, dai poliedri alle superfici curve. Fonte: it.wikipedia.org/Mesh_poligonale
1.3.2 Ricostruzione della Nuvola di Punti
L'editing della nuvola di punti e la successiva trasformazione di quest'ultima in un modello superficiale ad elevato numero di poligoni, costituiscono l'operazione preliminare per qualsiasi applicazione si voglia svolgere sul modello.
L'acquisizione dei dati ha avuto origine mediante la "battitura" di 25 punti di stazionamento, lungo il perimetro murario e poi all'interno della chiesa, dai quali sono state realizzate scansioni a 360° dell'involucro edilizio.
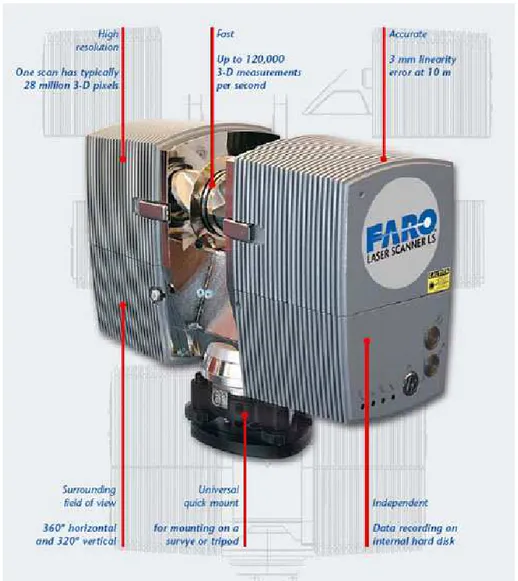
Per poter finalizzare tale operazione, in virtù della strumentazione a disposizione, è stato utilizzato il Laser Scanner Terrestre FARO Photon 120 con sistema di misurazione a modulazione di fase.
Figura 1.5: Immagine esemplificativa dello strumento utilizzato per le scansioni tridimensionali: FARO
Questo strumento, una volta posizionato, consente l'esecuzione di scansioni omnidirezionale, ruotando completamente intorno al proprio asse verticale e direzionando il fascio lungo l'asse orizzontale attraverso uno specchio rotante. In questa maniera, è in grado di restituire per ogni acquisizione una nuvola di punti con copertura sferica. Lo strumento non richiede di essere livellato in maniera precisa, in quanto dispone di un dispositivo interno di orientamento verticale. Impiegando poi un pattern illuminante sinusoidale, riduce notevolmente i tempi di acquisizione rispetto alle tradizionali tempistiche di scansione.
I parametri impostati prima dell'avvio hanno riguardato il settaggio della risoluzione, al fine di stabilire un numero finito di punti da rilevare, la velocità di scansione, inversamente proporzionale alla precedente e la precisione, quest'ultima collegata da proporzionalità diretta rispetto alla definizione.
All'avvio della procedura, il raggio laser viene deflesso mediante un meccanismo di specchi rotanti, che con il variare dell'angolo azimutale e zenitale illumina l'oggetto del rilievo. Per ogni misurazione il sistema fornisce l'intensità del segnale di ritorno descrivendo la superficie dell'oggetto scansionato.
Dal momento che la posizione relativa di ciascuna ripresa effettuata non risulta inizialmente nota, i dati di ciascuna scansione presentano un sistema di riferimento proprio. Per questo motivo, alla acquisizione dei dati è seguita una fese di allineamento ed unione delle singole mappe in un unica nuvola di punti orientata secondo un unico sistema di riferimento. Per ogni scansione effettuata, relativamente al sistema di riferimento espresso in coordinate spaziali X,Y,Z, per proprietà intrinseca dello strumento stesso, l'asse verticale (Z) è risultato essere l'unico in comune tra tutte le "battute". Questa peculiarità ha permesso di limitare il numero di gradi di liberà tra le varie porzioni acquisite, velocizzando le procedure di allineamento tra le parti, ottenute per via geometrica.
Generalmente, rilievi di edifici vengono allineati utilizzando marker e mire di riferimento, spesso rilevati con stazione totale. In questo caso, però, è stato preliminarmente scelto di utilizzare un tipo di allineaento basato sulla ridondanza geometrica. Tutta l'area in comune fra le diverse riprese viene usata come riferimento per allineare le differenti acquisizioni; questo rende più snella la fase di rilevo (non vengono usati marker), non utilizzando un eccessivo overhead durante il processing.
Questa procedura, tuttavia, necessità di una buona sovrapposizione fra le riprese, spesso non facile in ambienti angusti o con aperture ridotte. Data però la natura geometrica dell'edificio, ha restituito livelli di precisione pari a quelli ottenibili dai marker.
Nello specifico la ricostruzione delle mappe è stato eseguito mediante algoritmi di
surface matching, in particolare l'ICP (Interactive Closet Point), implementato nel
software MeshLab, attraverso il quale l'allineamento tra scansioni adiacenti è ottenuto minimizzando la distanza tra le loro parti in comune.
E' possibile associare questa fase del lavoro, ad una ricostruzione virtuale di un puzzle 3d, registrato per parti: occorre quindi unire tra loro tutte le mappe acquisite, in modo da rendere possibile la loro congiunzione attraverso una sovrapposizione su vasta area al fine di ricoprire completamente l'intero oggetto.
I 25 punti di stazione dai quali sono scaturiti i relativi dati, trovano quindi giustificazione nella necessità di fornire una descrizione quanto più completa dell'intero organismo edilizio. In secondo luogo, per aspetti tipicamente geometrici riferiti alla volumetria del manufatto, è possibile che subentrino errori il luogo di lacune e mancanze, durante "l'assemblamento", che solo un numero sufficiente di scansioni successive permette di minimizzare.
Ogni mappa2 risulta definita in un apposito spazio di coordinate, dipendente dalla localizzazione spaziale dello strumento, a cui corrisponde una specifica matrice di roto-traslazione. L'obbiettivo della registrazione è dunque quello di riportare tutti i dati acquisiti in un unico spazio definito da una comune terna cartesiana.
Gli algoritmi dedicati a questa operazione, come precedentemente illustrato, utilizzano zone di superficie in comune (Fig. 1.7), attraverso cui, riconoscendo le aree di sovrapposizione, uniscono le parti tra di loro. E' importante sottolineare che poiché gli errori che si commettono nel rilevamento dei punti sono a dispersione gaussiana, maggiore è il numero di misurazioni in uno stesso punto, minore sarà l'errore ad esso associato e più preciso risulterà il modello finale.
L'esecuzione pratica dell'algoritmo descritto, consiste in una operazione semi-automatica, realizzabile nello stesso software MeshLab, che presuppone un processo iterativo di sovrapposizione. Ad una prima fase di posizionamento iniziale manuale di due mappe successive (Fig. 1.6) corrisponde un raffinamento della registrazione attraverso un fine allineamento (Fig. 1.7).
Più nello specifico, vengono selezionati 4 / 5 punti in comune su entrambe le mappe: grazie a queste coppie di punti il software è in grado di calcolare una matrice di roto-traslazione che allinea la prima nuvola con la seconda (Fig. 1.8). Il procedimento continua aggiungendo nuove riprese, allineando di volta in volta la nuova ripresa con quelle già posizionate, fino a completare l'oggetto.
Va tuttavia sottolineato, che è opportuno scegliere con coerenza le coppie da sovrapporre: affinché sia possibile definire con successo un primo allineamento, le due mappe in oggetto devono presentare una percentuale di superficie condivisa non inferiore al 30% del totale.
Non è stato possibile tuttavia georeferenziare il modello scansionato, generalmente ottenuto mediante GPS o stazione totale, in mancanza di una rete topografica di appoggio. Il sistema di riferimento del modello è stato quindi scelto in maniera arbitraria, in modo da facilitare le successive operazioni di ricostruzione.
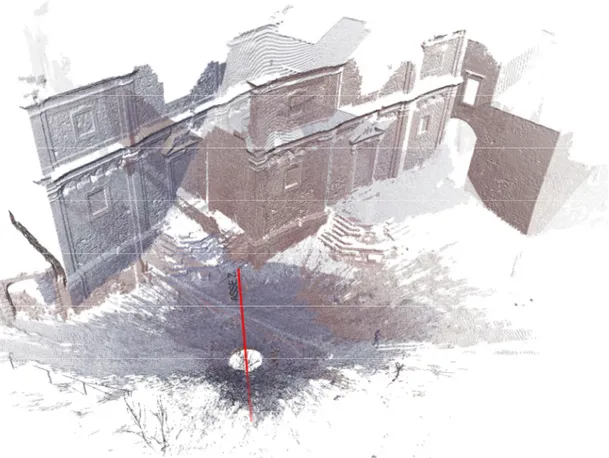
Figura 1.6: Esempi di scansioni eseguite con laser 3d: nell'immagine sono riportate le acquisizioni
della facciata, prese da due punti di stazione differenti. All'aperture dei dati nell'apposito software, questi vengono allineati, in riferimento alla posizione dello strumento, lungo l'asse Z, risultando quindi svincolati l'uno rispetto all'altro.
Figura 1.7: Allineamento geometrico eseguito in base agli algoritmi di surface matching,
implementati nel software MeshLab: i punti selezionati per la ricostruzione sono 5 e appartenenti a piani superficiali diversi, al fine di affinare la sovrapposizione tra le due acquisizioni.
Figura 1.8: Il risultato dell'allineamento delle due scansioni di facciata; l'errore viene minimizzato
mediante una media tra le distanze tra i 5 punti selezionati precedentemente. Nell'immagine si può notare come, al termine di questa operazione, le due scansioni risultino referenziate ad una comune terna di assi cartesiani; inoltre sono ora distinguibili i due punti di stazione dai quali sono state effettuate le acquisizioni.
Figura 1.9: Il risultato finale derivato dall'allineamento di 25 porzioni di chiesa scansionate. Questo
modello, una volta depurato dal disturbo e dal rumore della vegetazione, sarà costituito da circa 5mln di punti rilevati.
1.3.3 Generazione della Mesh e ortoproiezione dei dati
Come illustrato nelle precedenti pagine, le mappe ottenute dalle scansioni effettuate, costituiscono, in termini analitici, matrici di punti dello spazio (x, y, z). Sebbene gli algoritmi di calcolo implementati nel software MeshLab, offrano agli operatori la possibilità di effettuare infinite misurazioni sull'oggetto ricostruito, ai fini del presente studio, si è reso necessario eseguire tutte le operazioni utili alla generazione di un modello superficiale compatto della chiesa, che potesse essere facilmente editato, al fine di ricavarne tutte le informazioni indispensabili a definire sul piano l'edificio.
Con l'intenzione di rendere ulteriormente comprensivo agli estranei alla materia, il concetto di superficie poligonale, si ritiene utile in questa sezione, illustrare brevemente l'importanza di questa funzione.
Nella computer grafica 3D, una mesh poligonale, detta anche maglia poligonale, è una collezione di vertici, spigoli e facce volti a definire un poliedro3: queste consistono solitamente in triangoli, quadrilateri o in alcuni casi in semplici poligoni convessi, che semplificano notevolmente il rendering4. In molte applicazioni e nella maggior parte dei software di disegno assistito per la modellazione tridimensionale, questi elementi vengono presentati come vertici, edge e facce.
Nel dettaglio un vertice è un ente geometrico puntuale posizionato nello spazio che
3 Solido delimitato da un numero finito di facce come piani poligonali: esempi di poliedri semplici sono il cubo, il parallelepipedo, la piramide ed il prisma. Più complessi sono invece i solidi platonici.
4 In computer grafica identifica il processo di resa ovvero di una generazione di un'immagine a partire da una descrizione matematica di una scena tridimensionale interpretata da algoritmi che
descrive le informazioni relative al colore, al vettore normale e alle coordinate delle texture.
L'edge è la connessione tra due vertici e la faccia un insieme di punti nello spazio racchiuso tra edge stessi.
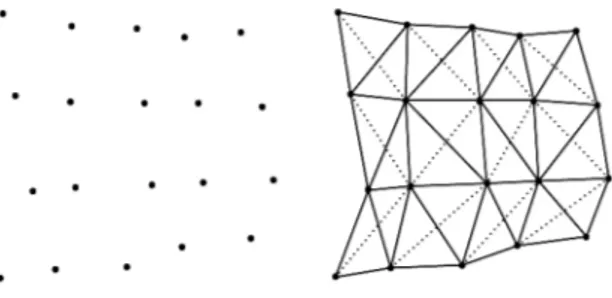
Di solito l'unità base che definisce una superficie così fatta, può essere costituita da un quadrilatero o un triangolo. Risulta evidente che riducendo la distanza tra un insieme di vertici, che in questa descrizione possono essere assimilati per assonanza ai punti della nuvola, si riduce la dimensione degli edge e con essi la superficie di un singolo triangolo.
Utilizzando quindi una nuvola di punti molto densa, è possibile ottenere la costruzione di una superficie sufficientemente dettagliata e costituita da un elevato numero di poligoni di dimensioni contenute.
Figura 1.9: Creazione di una mesh a partire da un numero finito di punti. Fonte: Lucia Truppia,
Scansione di oggetti 3d: guida metodologica e casi di studio. Tesi di Laurea - Università degli studi di Catania; 2006
In riferimento al caso in esame, considerando l'intenzione di pervenire ad un modello superficiale a triangoli, è possibile che alcuni spigoli possano non rispecchiare esattamente la connettività dell'oggetto originario: se le superfici rilevate si presentano estremamente inclinate rispetto al range dello strumento, o se i punti acquisiti dovessero risultare estremamente discretizzati, l'elaborazione del modello superficiale potrebbe essere fortemente dissimile dal dato reale (Fig. 1.10).
La generazione di una superficie triangolata a partire da una nuvola di punti non è una operazione banale, ed esistono differenti metodi per effettuare questa operazione. Nella maggior parte dei casi, risulta automatica: la nuvola di punti viene elaborata attraverso un algoritmo che, in genere, ha come input il livello di dettaglio desiderato.
Entrando nel merito del lavoro, in riferimento al software utilizzato, per ottenere un modello superficiale triangolato dalla nuvola di punti è stato utilizzato un metodo matematico implicito, chiamato Poisson Reconstruction. Questo metodo risulta particolarmente efficace su nuvole di punti complesse, come quelle ottenute da scansioni, riuscendo a mantenere il dettaglio originale, e ad eliminare il rumore di campionamento. Purtroppo, in alcuni casi, quando l'acquisizione è insufficiente oppure l'area ripresa ha una topologia confusa, possono generarsi aree inconsistenti. Questi errori tuttavia risultano di facile individuazione, e possono essere ignorati nella raccolta dati oppure sistemati manualmente.
La conversione da nuvola a superficie è stata effettuata sia dentro MeshLab, per poter raggiungere un più alto livello di dettaglio, sia utilizzando il tool out-of-core
streaming reconstruction5 mediante il quale, a linea di comando, si è dato avvio ad
una procedura analitica automatica, attraverso cui è stata generata la mesh della chiesa da 8.243.619 facce.
Figura 1.10: Dettaglio del modello tridimensionale della chiesa editato in superficie: la presenza del
rumore dovuto ai detriti depositati sulla pavimentazione, e il campionamento non ottimale dell'area ha imposto al programma un'eccessiva semplificazione dei triangoli generando una superficie sul terreno diversa dal dato reale.
Questa area della pavimentazione è stata ignorata durante la raccolta di misure e sezioni per la ricostruzione della chiesa, e successivamente ricostruita con un lieve intervento manuale.
Figura 1.11: Modello tridimensionale della chiesa depurato dal disturbo della vegetazione e di errori
dovuti a range di punti estremamente lontani l'uno rispetto all'altro; Superficie chiusa da 8.243.619 di poligoni. Vista di facciata.
Figura 1.12: Modello tridimensionale della chiesa depurato dal disturbo della vegetazione e di errori
dovuti a range di punti estremamente lontani l'uno rispetto all'altro; Superficie chiusa da 8.243.619 di poligoni. Vista dell'abside.
Il risultato della fusione dopo aver applicato il Poisson Reconstruction, ha prodotto quindi un modello superficiale tridimensionale ad elevato numero di poligoni, con limitate e poco significative aree interessate da errore, facilmente gestibile all'interno del software MeshLab. Questa utilissima applicazione, fornisce all'utilizzatore, tutti gli strumenti utili ad una corretta visualizzazione del modello rilevato, oltre a garantire l'elaborazione di rappresentazioni orto-proiettate dell'oggetto, esportabili come immagini raster e quindi facilmente vettorializzabili mediante procedure semi-automatiche.
Tuttavia, nell'interesse primario dell'operatore nel settore dell'ingegneria civile, al fine di poter disporre di tutte le informazioni metriche e materiche del manufatto edilizio, è indispensabile produrre una sufficiente documentazione grafica, in luogo di sezioni plano-altrimetriche, necessaria base per la redazione di qualsiasi intervento progettuale.
Nell'impossibilità di poter editare, nello stesso software, il modello tridimensionale generato, secondo le necessità appena descritte, è stato utile esportare quanto prodotto in formati (.OBJ) facilmente gestibili da altri programmi di disegno assistito. Tuttavia questo trasferimento di dati non è stato certamente privo di connotati, per certi aspetti, limitanti: una peculiarità, senza dubbio utilissima, del software dell'I.S.T.I. C.N.R. di Pisa6, è la facilità di gestione di modelli triangolati ad elevato numero di poligoni (oltre 10 milioni), da cui però non è direttamente possibile ottenere operazioni booleane, o tagli di sezione a cui possano seguire elaborazioni del modello bidimensionale. Altri software, quali AutoCAD, 3DsMax, Rhinoceros, consentono maggiore libertà di modellazione all'utente, lavorando però con un più basso numero di triangoli, quindi con dettagli e precisioni viziati da maggior errore.
Questa semplificazione, volta a ridurre il numero di vertici e di triangoli di cui è composto il modello, può essere operata sempre considerando quanto l'errore geometrico possa incidere in termini di accuratezza e precisione alterando visibilmente il dato analitico dell'oggetto.
Quanto appena detto ha valore se, nelle operazioni appena descritte, si considera la mesh triangolare nella sua interezza; può quindi essere utile, nella necessità di dover illustrare delle parti con maggior dettaglio, trasferire presso altro software, la sola porzione di superficie per cui si ha bisogno di maggior accuratezza.
Per esempio, poiché altri software gestiscono un più basso numero di poligoni, nello studio della sola facciata, è possibile esportare solo la porzione di modello ad essa relativa, non rinunciando quindi a tutto il dettaglio acquisito in sede di elaborazione.
Dunque, per poter ricostruire le geometrie di pianta e di sezione, la mesh tridimensionale è stata quindi riadattata al fine di poter essere eseguibile dal software Autodesk 3DsMax. Nella volontà di rendere quanto più dettagliato il modello, sono state date istruzioni al programma in riferimento ad un re-mesh tale da garantire una sufficiente accuratezza.
Si è passati quindi da un modello digitale 3D originario da 8.243.619 di poligoni ad uno analogo costituito da 3.500.000 triangoli.
Appare evidente come, a parità di volume geometrico, la riduzione del numero di unità costituenti la mesh, comporti obbligatoriamente un aumento delle dimensioni di queste ultime con conseguente perdita di dettaglio di insieme. Ne risulta quindi un modello tridimensionale connotato da una grafica maggiormente ammorbidita (smooth).
Tuttavia, a seguito di un accurata analisi comparativa con la nuvola di punti rilevata, da cui per via indiretta sono ricavabili le misure d'insieme relative all'ingombro di pianta, è stato constatato che la perdita di informazione nella semplificazione del numero dei poligoni ha prodotto una differenza di misure con errore marginale ben al di sotto del centimetro.
Validata la qualità del modello, sono state eseguite sezioni planari a distanze stabilite, che per via indiretta, hanno permesso l'estrapolazione del dato grafico di pianta, facilmente esportabile sui software CAD e da questi reso eseguibile, modificabile e soprattutto misurabile.
Una trattazione differente ha riguardato invece l'elaborazione dei formati grafici relativi ai prospetti: su questi ultimi, a differenza dei dati di pianta, rivestono notevole importanza tutte le informazioni inerenti la caratterizzazione materica
delle superfici murarie, in luogo dei materiali e della possibilità di documentare tutti i fattori di degrado in esse presenti.
Per tanto sono state realizzate immagini raster ad alta definizione relative all'orto-proiezione dei prospetti, successivamente vettorializzate, al fine di ricavare il dato geometrico ed infine ridisegnate nel tentativo di conferire loro una connotazione grafica più originale.
1.4 Descrizione dello stato di fatto della chiesa
Dell'antico complesso monastico della Badia dei Camaldolesi di Volterra, il cui impianto risale al XI secolo, sono oggi sufficientemente conservati, i locali conventuali, quali il chiostro ed i relativi ambienti intorno ad esso, sviluppati e strutturati su tre livelli fuori terra. Di questi, tutto il piano primo, relativo all'ingresso principale al monastero e a cui si accede tramite un apposita rampa di 13 gradini, è stato interessato nel corso dell'ultimo anno da un accurata opera di risanamento strutturale e conservativo, che ha consentito la riapertura al pubblico dell'antico refettorio, all'estremità sud del chiostro, delle cucine, e di ulteriori ambienti secondari.
Viceversa, il piano terra, originariamente sede di officine e depositi, ed il piano ultimo, dove vi erano le camere, attendono ancora di poter essere messi in sicurezza al fine di completare un'accurata indagine di rilievo, preliminare operazione per un progetto di consolidamento.
Per quanto concerne invece lo stato di conservazione della chiesa, sebbene nel corso della primavera del 2013 siano stati effettuati diversi intervanti di ripulitura delle superfici murarie e di rafforzamento strutturale in luogo di lacune di materiale, il complesso monumentale si configura come uno spazio architettonico ridotto allo stato di rudere, di cui si conservano poche tracce di antiche preesistenze, quali le mura perimetrali, una porzione della facciata e della retrostante abside con torre campanaria su pianta quadrangolare.
In riferimento all'esegesi della chiesa, ai caratteri compositivi perduti ed alle cause che ne hanno determinato la rovina, si rimanda al capitolo successivo.
Volendo, in questa sezione, fornire una dettagliata descrizione dello stato di conservazione della chiesa, occorre premettere che, nell'ambito del progetto A.R.T.E. SALVA7, volto alla conoscenza e salvaguardia del patrimonio storico
architettonico della Regione Toscana, non è stato possibile provvedere all'acquisizione analitica dei dati metrici e materici della struttura monastica, per ragioni legate alle operazioni di consolidamento precedentemente descritte e per sopravvenuti ostacoli di carattere amministrativo emerse tra i vari Enti titolari della custodia Badia.
In relazione invece alla documentazione sulla chiesa, sono stati prodotti tutti gli elaborati grafici essenziali a descriverne la geometria e la caratterizzazione materica delle superfici, che al periodo di rilevamento (ottobre 2010), risultavano essere interessate da consistente stato di degrado.
L'impianto planimetrico della sola chiesa si sviluppa, in maniera non regolare, su una superficie di 478 mq, descrivendo una geometria di pianta poligonale, più che rettangolare, con lato più esteso pari a c.a. 31,28 m e lato corto di 18,51 m, considerati lungo il perimetro esterno del manufatto.
Originariamente la configurazione volumetrica interna presentava una suddivisione degli spazi in tre navate, di cui tutt'oggi si conservano ancora i resti dei profili murari relativi a quella centrale, riconoscibili sulle pareti interne della facciata, ai lati dell'abside, e per la presenza di una importante massa muraria degradata, connessa alla torre campanaria.
Come consuetudine consolidata fin dalle prime basiliche di epoca romana, la struttura dell'edificio si sviluppa longitudinalmente secondo una direttrice che va da ovest verso est procedendo dal portale di accesso verso l'abside. Sulle superfici murarie dei quest'ultima, caratterizzata dalla tipica configurazione ad esedra con catino a semicupola, si conservano ancora segni di antiche pitture decorative, presenti sui superstiti blocchi lapidei lavorati. Tre sono le monofore che ne caratterizzano l'aspetto, di cui quella centrale risulta di dimensioni più estese rispetto a quelle laterali, quest'ultime incorniciate da pietra finemente lavorata.8
Sono ancora presenti, inoltre, le tracce di una antica cornice lapidea, che connotava l'imposta della semicupola del catino absidale e continuava parallelamente lungo le pareti di navata, quasi a demarcare il passaggio a quella zona del cleristorio nei secoli modificata. Tale cornice viene interrotta dalla monofora centrale che nella sommità arcuata sembra quasi invadere la semicupola di coronamento.
Nell'angolo meridionale più esposto a est, di fianco all'abside, è presente una torre campanaria, presumibilmente coeva alla struttura romanica della chiesa, connotata da un disegno di pianta rettangolare e che, come confermato dalla documentazioni storiche, si presentava in origine ben più alta degli attuali 18 m. Sulle pareti di quest'ultima, ad un altezza di 12,65 m dal piano di calpestio, si trovano quattro finestroni, l'uno di fronte all'altro in riferimento alle rispettive facce parallele, chiuse in sommità da un motivo arcuato, caratterizzato dall'utilizzo di pietre chiare e scure, disposte alternatamente, evidente segno di connotazione romanica.
Dei solai di piano, quasi certamente lignei, non vi è oggi alcuna traccia, pur non mancando le mensole di appoggio delle travi lungo il perimetro interno del campanile.
Sulla superficie muraria che si affaccia lungo quella che un tempo era la navata laterale dedicata a San Romualdo, sono tuttora presenti evidenti segni relativi ai perduti ancoraggi di copertura sullo stesso campanile. Da una lettura stratigrafica accurata, è possibile riconoscere il profilo di attacco del manto originario, quello relativo al "granaio nuovo" del 1656, nonché tutti i segni riferiti a differenti piani di laterizi, incassati direttamente nella superficie muraria al fine di prevenire e limitare fenomeni di accumulo delle acque lungo l'antico compluvio di falda.9
9 Come verrà descritto nei capitoli successivi, originariamente l'impianto delle coperture della chiesa a tre navate prevedeva la configurazione classica del tetto a capanna su quella centrale e di due falde più basse e speculari lungo quelle laterali. Durante le campagne di interventi di ampliamento del complesso nel XVII secolo, verrà realizzato un secondo ambiente sulla navata sud, che comporterà ,come diretta conseguenza, la realizzazione di una nuova copertura di falda, che insieme a quella della navata centrale formerà un compluvio per la raccolta delle acque, da destinare, con apposti condotti, alla cisterna al di sotto del chiostro.
In riferimento al piano di calpestio, quello che oggi è presente, altri non è che una mera distesa di vegetazione incolta. Tuttavia, lungo la zona che un tempo strutturava il coro e la sacrestia e che risultava sopralevata di due gradoni rispetto alle navate, si osserva un avallamento omogeneo del terreno, presentante un dislivello riferito alla zona di accesso di poco meno di 0,80 m.
Se è noto che nel corso del XIX secolo, gli interventi di spoglio della chiesa, al fine di ridurla ad uno stato tale da garantirne una sufficiente integrità statica, abbiano privato il complesso di tutto l'apparato decorativo interno (colonne, capitelli, basi), è pur vero che in assenza di accurate indagini di scavo, non è possibile desumere alcun tipo di preesistenza o traccia al di sotto del terreno appena descritto.
In riferimento alla trattazione delle superfici murarie, tralasciando alle prossime pagine la descrizione della facciata, desta senza dubbio interesse la caratterizzazione del fronte absidale. Considerando la sezione trasversale interna, è possibile osservare alla sinistra dell'abside, un ampio arco incassato nel muro e realizzato sempre ricorrendo all'alternanza di conci in pietra chiari e scuri. Dando per assodata la funzione prevalentemente statica di tale soluzione, la volontà di realizzarla secondo canoni più decorativi, deriva essenzialmente dalla posizione stessa dell'arco, che risulta essere "a vista" rispetto al resto della navata. Al di sotto di quest'ultimo si apre una monofora del tutto analoga a quella che si ritrova lungo la parete comunicante con il monastero, testimonianza certa di un intervento strutturale originario.
Tutto il carattere romanico della chiesa emerge dall'apparato decorativo superstite che caratterizza l'abside. Seppure in assenza della struttura conica dell'antica copertura, in considerazione dell'insieme travi/assito/coppi, appare perfettamente conservata la semicupola del catino absidale, rivestita all'interno di quei blocchi lapidei di pietra finemente lavorata, che un tempo dovevano decorare tutte le
superfici interne. Questa struttura, avente raggio poco inferiore ai 3 m 10, risulta coronata in sommità da una coppia concentrica di archi, dalla citata composizione romanico-pisana, le cui reni appoggiano su quella stessa cornice in pietra che un tempo correva lungo le pareti di navata fin contro la facciata.
Su questa superficie muraria, sono tuttora evidenti i segni delle antiche pareti che delimitavano le navate. Queste testimonianze offrono una misura di ingombro degli spazi della chiesa che possono essere così riassunte: larghezza della navata laterale nord pari a circa 4,3 m, navata centrale pari a 5,9 m e larghezza della navata sud di 4,12 m, con spessori murari medi nell'intorno di 0,80 m.
Per quanto concerne invece la trattazione superficiale esterna dello stesso fronte murario, è possibile osservare lo stato di degrado della parete della navata laterale, caratterizzata dall'assenza dei blocchi lapidei lavorati, che ricoprono in misura analoga il perimetro longitudinale, da imputare presumibilmente ad una passata asportazione.
Il profilo murario che connota il prospetto nord della chiesa, evidenzia chiari segni di degrado, in parte ricercati: se le lacune superficiali, in luogo dei distacchi di blocchi lapidei, sono state parzialmente risanate durante le operazioni di consolidamento della primavera 2013, le campagne di restauri occorsi nel XIX secolo hanno di fatto conferito alla chiesa della Badia tutti quei connotati morfologici che oggi la caratterizzano. Le demolizioni di tutti quei profili murari degradati e pericolanti, sono state eseguite al fine di garantire al complesso un'adeguata stabilità statica, accogliendo, pertanto, la scelta compositiva di lasciarla priva delle coperture e spoglia da tutto l'apparato decorativo.
Analizzando nel dettaglio la sezione muraria, in virtù delle già citate lacune, è possibile individuare nell'opera cementizia, intesa in accezione molto ampia, la tecnica esecutiva utilizzata per la realizzazione del complesso indagato. La dove si localizzano i distacchi, emergono i connotati del materiale cementizio in cui sono
10 L'equivalente del diametro degli archi che un tempo arricchivano le pareti di navata. Cfr. Tav. 12 (A.Ferrara)
annegati conci di pietra grezza, volti a costituire il legante principale della struttura. Alle due estremità di parete emergono invece blocchi in pietra, presumibilmente calcarea e lavorata in modo da renderla quanto più regolare, disposti lungo filari orizzontali che alternano, a seconda delle varie fasce, elementi caratterizzati da dimensioni differenti.
In termini prettamente strutturali, sono facilmente riconoscibili tre grandi contrafforti di parete, dalla forma a cuneo, collocati alle due estremità e in posizione centrale, testimonianza di un intervento certamente non coevo all'impianto originario, giustificabile dall'incoerenza del terreno sottostante, causa di numerosi crolli nelle zone circostanti.
Tutto l'apparato murario appoggia direttamente su di un alto sperone realizzato mediante il ricorso a blocchi in pietra non lavorata ma disposti in modo da seguire regolarmente la geometria del profilo di parete. E' dunque possibile che tale elemento di struttura, possa essere la continuazione fuori terra del complesso di fondazione su cui si appoggia la chiesa, connotato quindi da muratura interrata con sezione ben più ampia rispetto alla sovrastante parete.
Nell'angolo tra il prospetto in oggetto e il profilo di facciata, si riconoscono i tratti peculiari di un ulteriore profilo murario che, in virtù delle documentazioni storiche emerse dalle ricerche d'archivio, doveva racchiudere una porzione di terreno un tempo interessata da un piccolo cimitero nel quale venivano tumulati i monaci custodi del monastero.
L'alto podio, caratterizzante la parete nord, viene riproposto in facciata: su questa però la caratterizzazione della superficie assume connotati più decorativi, in virtù del ricorso a blocchi lapidei lavorati in modo da renderli regolari con disposizione a "filaretto".
Il portale di accesso, incorniciato da motivo a edicola, è collocato ad una altezza da terra di 2,80 m, raggiungibile mediante una gradinata di 14 alzate, connotati da una geometria di pianta trapezioidale. Gli ultimi tre sono comuni gradoni dalla geometria prismatica, evidente segno di un innalzamento successivo del piano di
calpestio o del solo portale di accesso.
Lo stato di conservazione del prospetto di facciata è caratterizzato dalla mancanza dell'impianto decorativo al di sopra del finestrone centrale, arricchito un tempo da ampie volute laterali e da un alta superficie di parete culminante con spiccati podi su cui erano inserite le statue relative ai santi.
Trattandosi di una istallazione rinascimentale, la geometria del prospetto risulta connotata da tutti quei canoni decorativi volti alla riproposizione di un gusto compositivo tipico del periodo classico. All'interno di una matrice rettangolare la suddivisione degli spazi superficiali viene scandita dall'introduzione di un sistema di lesene, trinate nella parte centrale e binate alle estremità, che staccandosi dall'alto podio di base si innalzano, o meglio si innalzavano, fino alle trabeazioni di sommità. La scansione delle lesene di facciata, ripropone quella che un tempo era la suddivisione in navate della chiesa, rappresentando schematicamente all'esterno, gli ingombri trasversali di questi ambienti. Ragione per cui lo spazio tra i gruppi di lesene centrali appare più dilatato rispetto a quelli laterali. Su questi ultimi, si istallano, nelle due fasce in cui appare suddiviso il prospetto, due finte finestre allineate verticlamente ed arricchite da una cornice in pietra lavorata.
Il portale di accesso, pesantemente modificato durante l'ammodernamento della facciata, risulta arricchito da un timpano spezzato nel cui frontone si riconoscono i segni di una istallazione decorativa che richiama un giglio abbottonato affiancato da due motivi a volute. Richiami, questi ultimi, volti ad un riconoscimento verso un'amministrazione fiorentina, segno tangibile del dominio che la città aveva su Volterra nel Cinquecento.
Lungo la prima cornice trabeata che delimita il passaggio alla seconda fascia di prospetto, sono tuttora visibili i vuoti lasciati dai dodici archetti pensili che un tempo decoravano la facciata della chiesa ed ancor prima quella di S.Giusto "al Botro", oggi conservati presso il museo archeologico della città. Inoltre è possibile osservare la presenza di una cornice in marmo arrecante un incisione latina (vedi capitolo....) in cui viene sottolineata la devozione ai santi a cui la chiesa era dedicata.
Del finestrone centrale, perfettamente allineato con il sottostante portale, oggi non è presente alcuna traccia fatta eccezione di una piccola porzione di cornice, che nei materiali e nella lavorazione si ricollega ai finti finestroni laterali. Tuttavia, il maggior spessore di quest'ultima lascia intendere che tale apertura fosse connotata da una cornice ben più estesa rispetto alle altre, in regione della posizione e delle maggiori dimensioni della finestra.
A differenza delle mura perimetrali, i materiali utilizzati per la realizzazione del comparto di facciata sono costituiti da piccoli conci in pietra misti ad elementi in laterizio, che un tempo dovevano essere trattati ad intonaco. Si ritrova invece pietra finemente lavorata in tutto l'apparto decorativo delle lesene e delle trabeazioni, nell'intenzione di creare maggior contrasto con le retrostanti superfici.
Evidenti tracce del carattere originario della chiesa, sono rintracciabili lungo la superficie muraria interna della facciata. Il portale rettangolare presenta in sommità un architrave in laterizio sormontato da motivo arcuato; come è possibile inoltre osservare dal materiale fotografico non eccessivamente datato, all'ampiezza del portale esterno non corrispondeva un'altrettanta dimensione interna. Caratteristica quest'ultima di un intervento lasciato a metà.
Lo spessore della sezione muraria, nonché gli evidenti segni tuttora visibili relativi alla vecchia geometria di facciata, lasciano desumere che l'istallazione seicentesca sia stata eseguita come un vero e proprio impianto aggiuntivo collegato al preesistente.
Tuttavia, tutti questi interventi, hanno finito per nascondere irrimediabilmente i connotati stilistici e strutturali della chiesa originaria, di chiara ispirazione romanica.
In conclusione, va posta particolare attenzione all'intervento di riproposizione della scalinata di accesso, realizzato nel 2013, con l'intenzione non celata di ricreare l'antica geometrica utilizzando materiali lapidei quanto più possibile simili a quelli regressi.
Figura 1.16: Prospetto laterale. Scala originale 1:50. Rilievo e restituzione grafica Andrea Ferrara.
Figura 1.17: Sezione longitudinale sulla torre campanaria. Scala originale 1:50. Rilievo e restituzione